自抗扰控制技术在火力发电厂中的应用
2017-01-09胡康涛潘凤萍万文军
胡康涛,潘凤萍,万文军
(广东电网有限责任公司电力科学研究院,广东 广州 510080)
自抗扰控制技术在火力发电厂中的应用
胡康涛,潘凤萍,万文军
(广东电网有限责任公司电力科学研究院,广东 广州 510080)
在火力发电厂中,以常规比例-积分-微分(proportion integration differentiation,PID)为主的控制策略对大惯性、大迟延、多扰动回路的控制效果难以同时满足抗扰性和鲁棒性的要求。针对自抗扰控制(active disturbance rejection control,ADRC)技术的抗扰性强、跟踪快速无超调特点,研究其工程化实现方法和参数整定原则,并将其应用于某1 000 MW超超临界火电机组低压加热器水位控制回路和某300 MW亚临界火电机组磨煤机出口风温控制回路。结果表明:采用ADRC技术控制后,闭环系统的抗扰特性要明显优于原来的PID控制,同时也证明了所提的一阶ADRC参数整定方法的有效性。
过程控制;自抗扰控制;参数整定;比例-积分-微分;工程应用
火力发电过程是一个燃烧、传热和传质相互耦合的复杂能量转化过程,系统具有扰动多、惯性大、迟延大等特点。比例-积分-微分(proportion integration differentiation,PID)控制技术以其结构简单、鲁棒性好及易于整定等特点,在工业过程中获得广泛的应用[1]。然而积分器具有相位滞后特性,以常规PI为主的控制策略在抗干扰能力方面受到很大程度的制约,很难在主蒸汽温度、主蒸汽压力、功率等关键参数的控制精度上显著提高。
自抗扰控制(active disturbance rejection control,ADRC)技术最早由中国科学院的韩京清[2]提出,通过扩张状态观测器(extended state observer,ESO)可以对内、外扰动以及模型的不确定部分进行实时估计并主动补偿,是一种对参数涉动和干扰具有很强适应性的控制方法。目前,ADRC的应用以非线性结构为主,其结构比较复杂,需要整定的参数过多,一定程度上制约了其大规模工程应用。美国克里夫兰州立大学高志强教授引入“带宽”的思想[3]将ADRC需要整定的参数简化成3个,使得ADRC技术的工程化应用迈出了重要一步。华北电力大学在汽温和协调控制上,采用ADRC进行了大量的理论和仿真研究[4]。清华大学在大迟延、高阶数、多入多出等典型热工对象的ADRC应用上也取得了大量理论成果[5-7]。然而针对热工对象的ADRC如何设计和整定并未形成一套很好的方法,这也使得ADRC技术在火电领域工程化应用进展缓慢。
本文研究一阶ADRC的工程化应用方法,并将其应用于1 000 MW超超临界机组低压加热器(以下简称“低加”)正常疏水水位控制和300 MW亚临界机组磨煤机出口风温控制,探索ADRC技术在火电领域的应用方法。
1 一阶ADRC的基本原理
以一阶ADRC为例,其组成包括比例控制器(kp)和二阶ESO两部分,基本结构如图1所示。
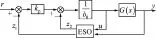
r—设定值;y—输出;z1—对过程信号的估计;z2—对扰动和未建模动态的估计;G(s)—被控对象传递函数;b0—增益估计。图1 一阶ADRC基本原理
对于一阶对象,其微分方程的形式为

(1)
式中:a、b为对象特征参数;d为外扰。
用变量f=-ay+d来表示系统的所有扰动和未建模动态,则可以将y和f作为两个线性无关的状态变量,将式(1)表示成状态空间的形式:
(2)
再引入误差反馈对状态空间的描述偏差实时修正,则可以将状态空间进一步表述成如下的形式,即ESO的数学表达式:
(3)
式中:以控制量u和被控量y作为ESO的实时输入,输出(z1,z2)则能实现对(y,f)的估计;若二阶ESO的参数β1和β2取值合理,z2能够实现对f的快速估计,若引入新的控制量u0,即可将原来的对象补偿成纯积分对象。这样通过对积分对象设计比例控制器就能达到控制目的,即
(4)
2 一阶ADRC的工程化方法
2.1 工程实现
与PID控制器的应用相同,ADRC在工程化应用时不仅需要考虑手动条件下的跟踪以保证手动/自动条件下的无扰切换,还应当包括ADRC的抗积分饱和、闭锁增和闭锁减等基本功能。绝大部分热工过程都可以近似认为有迟延,而扩张状态观测器的设计并不包含迟延部分。若将控制量u先经历与被控对象相同的纯迟延环节后再进入扩张状态观测器,就能在时间上使控制量u和被控量y相匹配,否则这种时间上失配会导致ESO的发散[8]。包含无扰切换功能的一阶ADRC的SAMA图如图2所示。

U—作用到执行机构的控制量;Y—输出;S—设定值;F—前馈量;M—切手动信号。图2 一阶ADRC实现的基本逻辑
2.2 工程化参数推导与整定
大部分热工对象都可以用一阶惯性纯滞后环节来近似描述:
(5)
式中:K为比例系数;T为积分系数;θ为延迟;s为拉普拉斯算子。
结合式(3)可得控制量u经历时间为θ1的纯迟延后ESO的表达形式:

对式(5)和式(6)进行拉普拉斯变换,可得:
(7)
通过ESO补偿后的广义对象的传递函数为:
(8)
从式(8)可以看出,在被控对象包含有纯迟延的情况下,即使扩张状态观测器的观测速度再快,也无法完全补偿成积分纯迟延的形式,但可以考虑在一定情况下对上述表达式进行简化。
假设对系统的增益和纯迟延的估计比较准确,即b0≈b,θ1≈θ。考虑到过程生产大部分对象的固有频率均在1 Hz以下,对纯迟延部分作泰勒展开,并在低频范围内作合理的近似,即e-θ1s≈1-θ1s。
这样可以进一步简化,则
(9)
(10)
为让M(s)在数学上尽量趋近于稳态增益,假设m=β1·T,且令m≥10,则
(11)
利用“带宽”的思想,假设内回路M(s)的带宽为wm,则
(12)
工程上,对经ESO补偿后的对象设计比例控制器kp时,不仅要考虑wm,也需要考虑迟延θ对闭环控制的影响。因此,可令

(13)
自此,可以得到工程上整定ADRC参数的一种方法。
3 一阶ADRC的现场应用
3.1 低压加热器水位控制
在某1 000 MW超超临界火电机组5号低加水位控制中,一般情况下,该水位由正常疏水阀控制,调节范围在-100~100 mm之间,当水位超过150 mm时事故疏水阀门自动打开,以防止水位过高,低加解列。在正常水位调节范围内,该对象属于近似于纯积分的非自平衡对象。通过开环实验即可得到响应曲线的斜率为0.027 8,进而做适当的变形可得:
(14)
取m=40,由上章节整定方法可以得到一组ADRC的初始参数,这组参数下ADRC的水位控制效果如图3所示;PID参数以Skogestad[9]提出的参数整定方法为基础,并保证超调量在20%范围内进行参数再调整,尽量满足抗扰动效果和设定值跟踪速度,其控制效果如图4所示。

1—水位设定值;2—实际水位;3—正常疏水阀开度指令;4—正常疏水阀开度;5—危急疏水阀开度。图3 5号低压加热器采用ADRC的水位控制效果(2015-10-23)

1—水位设定值;2—实际水位;3—正常疏水阀开度指令;4—正常疏水阀开度;5—危急疏水阀开度。图4 5号低压加热器采用PID的水位控制效果(2015-10-25)
在ADRC控制下,系统设定值扰动的稳定时间约为340 s,基本无超调;在10%的危急疏水阀扰动下,水位波动最大为10 mm。在PID控制下,系统设定值扰动的稳定时间小于300 s,超调量约为15%;在6%的危机疏水阀扰动下,水位波动最大值为24 mm。
3.2 磨煤机出口风温控制
某300 MW亚临界机组的单台磨煤机由冷风门控制出口风温,热风门控制一次风流量,两控制回路之间存在一定的耦合。由于运行条件限制,热风门一直处于全开状态,此时冷风门的控制可以看成单回路,通过开环设定值扰动试验,可得到对象的传递函数
(15)
在负荷不变的情况下,对风温的扰动主要来源于给煤量的波动。通过对比PID和ADRC在稳态条件下风温的控制效果(如图5、图6所示),稳态下PID控制的风温波动维持在-1.5~+2.1 ℃之间;少量给煤量波动时,风温最大偏差为-3 ℃。而采用ADRC控制磨煤机风温时,温度的稳态波动范围显著缩小,基本维持在-0.5~+0.5 ℃之间。在30 MW变负荷导致给煤量大幅度波动的情况下,风温最大偏差为-1.3 ℃,控制效果有了明显的改善。

1—给煤量;2—磨煤机出口风温设定;3—磨煤机出口实际风温;4—冷风门阀位;5—冷风门阀位指令。图5 磨煤机风温的PID稳态控制效果(2016-01-10)
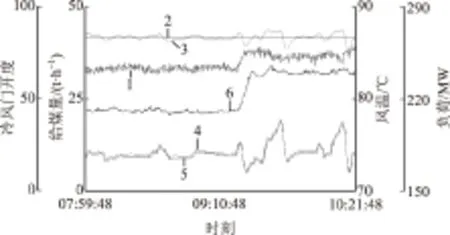
1—给煤量;2—磨煤机出口风温设定值;3—磨煤机出口实际风温;4—冷风门阀位;5—冷风门开度指令;6—机组负荷。图6 磨煤机风温的ADRC稳态控制效果(2016-01-10)
从ADRC与PID连续6 h控制效果比较可知(如图7所示),连续变负荷情况下,采用ADRC的风温控制效果都要明显优于在稳态情况下PID的控制效果。
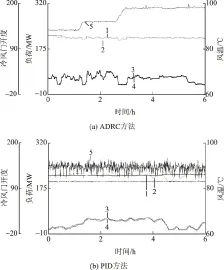
1—磨煤机出口风温设定值;2—磨煤机出口实际风温;3—冷风门开度;4—冷风门开度指令;5—机组负荷。图7 ADRC与PID连续6h控制效果比较
4 结束语
本文提出了一阶线性ADRC初参数的工程化整定方法,并在大型火电机组的水位控制回路和风温控制回路上成功应用。ADRC控制技术在大惯性、大迟延、多扰动回路控制上要优于传统PID控制策略,尤其在抗扰动性能上,ADRC具有明显的优势。ADRC在火电机组汽温控制、协调控制等复杂回路上已有大量研究和仿真,但工程应用上进展缓慢。结合传统PID控制策略中的前馈、解耦和非线性等思想,ADRC在热工控制领域将发挥更大作用。
[1] 王伟,张晶涛,柴天佑. PID参数先进整定方法综述[J]. 自动化学报,2000,26(3):348-355.
WANG Wei,ZHANG Jingtao,CHAI Tianyou. A Survey of Advanced PID Parameter Tuning Methods[J]. Acta Automatica Sinica,2000,26(3):348-355.
[2] 韩京清. 自抗扰控制器及应用[J]. 控制理论与决策,1998,13(1):19-23.
HAN Jingqing. Active Disturbance Rejection Controller and Its Applications[J]. Control and Decision,1998,13(1):19-23.[3] GAO Zhiqiang.Scaling and Bandwidth-parameterization Based Controller Tuning[C]//Proceedings of the American Control Conference,[S.l.]:IEEE,2003:4989-4996.
[4] 黄焕袍,武利强,韩京清,等. 火电单元机组协调系统的自抗扰控制方案研究[J]. 中国电机工程学报,2004,24(10):168-173.
HUANG Huanpao,WU Liqiang,HAN Jingqing, et al. A Study of Active Disturbance Rejection Control on Unit Coordinated Control System in Thermal Power Plant[J]. Proceedings of the CSEE,2004,24(10):168-173.
[5] HUANG Chune,LI Donghai,XUE Yali. Active Disturbance Rejection Control for the ALSTOM Gasifier Benchmark Problem[J]. Control Engineering Practice,2013(21):556-564.
[6] 孙立,董君伊,李东海,等. 基于扩张状态观测器的汽轮机功频电液串级控制[J]. 中国电机工程学报,2015,35(7):1697-1703.
SUN Li,DONG Junyi,LI Donghai,et al. Cascaded Load-frequency Digital Electric-hydraulic Regulation of Turbine via Extended State Observer[J]. Proceedings of the CSEE,2015,35(7):1697-1703.
[7] 刘翔,李东海,姜学智,等. 自抗扰控制器在高阶系统中应用的仿真[J]. 清华大学学报(自然科学版),2001,41(6):95-99.
LIU Xiang,LI Donghai,JIANG Xuezhi,et al. Simulation Study of Auto-disturbance Rejection Controller for High-order Systems[J]. Journal of Tsinghua University(Sci & Tech),2001,41(6):95-99.
[8] WANG Lijun,LI Qing,TONG Chaonan,et al. On Control Designand Tuning for First Order Plus Time Delay Plants with Significant Uncertainties[C]//Proceedings of American Control Conference. Chicago:IEEE,2015:5276-5281.
[9] SKOGESTAD S. Simple Analytic Rules for Model Reduction and PID Controller Tuning[J]. Journal of Process Control,2003,13:291-309.
(编辑 王朋)
Application of Active Disturbance Rejection Control Technology in Thermal Power Plant
HU Kangtao, PAN Fengping, WAN Wenjun
(Electric Power Research Institute of Guangdong Power Grid Co., Ltd., Guangzhou, Guangdong 510080, China)
In thermal power plants, the control strategy mainly based on conventional proportion integration differentiation (PID) can notsimultaneously satisfy requirements for disturbance rejection and robustness for controlling on great inertia, large time-delay and multi-disturbance loops. On the basis of characteristics of active disturbance rejection control (ADRC) technology including strong disturbance rejection and rapid tracking, this paper studies its engineering realization method and parameter setting principle, and applies it in water level control loop of low pressure heater of one 1 000 MW ultra supercritical thermal power generating unit and control loop for coal mill exit wind temperature of one 300 MW subcritical thermal power generating unit. Results indicate that after adopting ADRC technology, disturbance rejection of the closed-loop system is obviously superior to the original PID control. It also proves validity of the proposed setting method for first-order ADRC parameters.
process control; active disturbance rejection; parameter setting; proportion integration differentiation(PID); engineering application
2016-05-27
10.3969/j.issn.1007-290X.2016.12.001
TM73
A
1007-290X(2016)12-0001-05
胡康涛(1990),男,湖南涟源人。工程师,工学硕士,主要从事大型火电机组过程控制策略的研究。
潘凤萍(1967),女,河南南阳人。教授级高级工程师,工学博士,主要从事火力发电厂热控技术和工业过程监控与故障诊断技术研究。
万文军(1974),男,江西南昌人。高级工程师,工学博士,从事火电厂热控方面的试验与研究工作。
