无人机感知与避撞方法研究
2017-01-09左青海潘卫军卓星宇谭经纬
左青海,潘卫军,卓星宇,谭经纬
(中国民用航空飞行学院空中交通管理学院,四川广汉618307)
无人机感知与避撞方法研究
左青海,潘卫军,卓星宇,谭经纬
(中国民用航空飞行学院空中交通管理学院,四川广汉618307)
无人机与有人机的空域集成是无人机发展的一个关键问题。在此过程中,无人机感知与避撞系统扮演了一个至关重要的角色。感知与避撞的一项重要功能是保证无人机与其他航空器之间的安全间隔。首先介绍了无人机的分类以及应用与运行情况;其次,介绍了无人机感知与避撞系统的概念,对比分析了各类感知系统的特点;最后,基于马尔科夫决策过程提出了无人机避撞决策机制与避撞策略的生成方法。
无人机;空域集成;感知与避撞;决策机制;避撞策略
无人机,是由控制站管理的航空器,也称远程驾驶航空器。无人机系统(UAS),也称无人驾驶航空器系统(Remotely Piloted Aircraft Systems,RPAS),是指一架无人机、相关的遥控站、所需的指令与控制。根据无人机的重量等特征可将无人机作如表1所示的分类[1]。
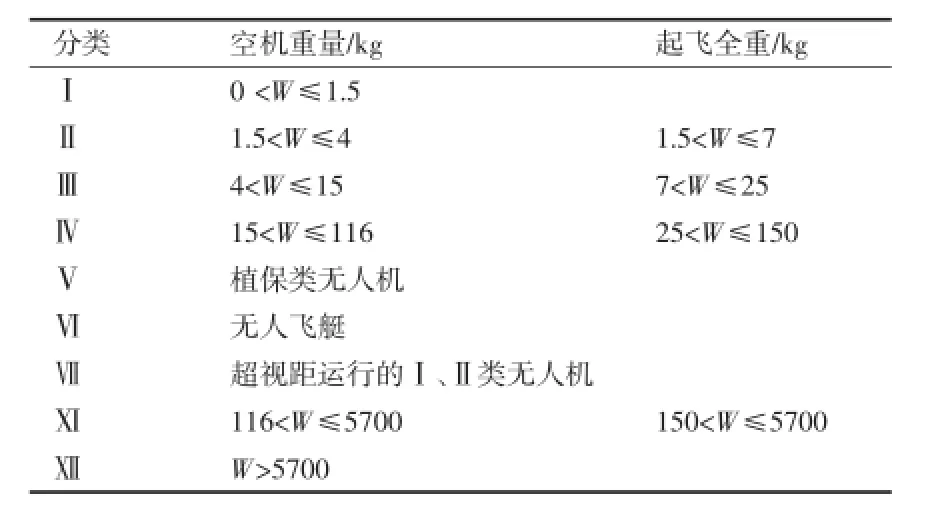
表1 无人机的分类
注:(1)实际运行中,I、II、III、IV、XI类分类有交叉时,按照较高要求的一类分类。
(2)对于串、并列运行或者编队运行的无人机,按照总重量分类。
(3)地方政府(例如当地公安部门)对于I、II类无人机重量界限低于本表规定的,以地方政府的具体要求为准。
与有人机相比,无人机使用更加灵活、成本更低、人员伤亡风险低,其在军用和民用领域都表现出了较好的应用前景。无人机可能引发的危害主要包括空中和地面撞击,为保障飞行安全目前各国普遍采用将其与有人机隔离运行的管理方式[2],这对空域资源造成极大浪费,也难以满足无人机日益增长的应用需求。无人机与有人机空域集成,即共享空域,是未来的发展趋势,因而感知与避撞问题也成为制约无人机发展的关键挑战之一。美国国家空域系统(NAS)的下一代空域系统计划指出:“下一代空域将着眼于利用卫星使得航管员、飞行员、乘客、无人飞行器以及其它相关者能够实时地共享空域”。美国国防部也制定了空域集成计划,计划逐步将无人机融入共享空域[3-4]。
目前,有人机主要依靠二次雷达、机载应答机、空中交通警戒与防撞系统(TCAS)等手段来防止空中相撞。与有人机不同,无人机系统只能单纯的依靠无人机上所装备的一系列传感器来完成障碍规避,这个过程称之为“感知与避撞”[5],实现这一过程的系统被称之为“感知与避撞系统”。感知与避撞系统的定义是:感知与避让是指看见、察觉或发现交通冲突或其他危险并采取适当行动的能力。无人机感知与避让系统是指无人机机载安装的一种设备,用以确保无人机与其他航空器保持一定的安全飞行间隔,相当于载人航空器的防撞系统[4-6]。由于视距范围内飞行的无人机通常由操作员人工执行感知与避撞过程,本文研究的主要是超视距飞行的无人机感知与避撞方法。
1 感知与避撞系统
目标探测是避撞的基础,根据感知探测方式进行分类,现有的感知与避撞系统可以基本分为两类:协同式感知与避撞系统和非协同式感知与避撞系统。协同,意味着所有飞行器可通过共同的通信链路共享信息,它需要其他航空器也搭载同类型目标检测传感器;非协同,则表示在空中的飞行器彼此间不通信,也就意味着只能采用主动检测的方法。
典型的无人机感知与避撞系统其工作过程如图1所示,决策机制根据传感器提供的数据判断是否需要改变飞行轨迹,避撞策略生成系统则在燃油经济性以及无人机空气动力学基础上,规划避撞飞行路线;若采用协同式传感器在生成避撞策略后会向其他航空器发送其意图,通过飞行控制系统来执行避撞操作;如果采用的是非协同式传感器则在生成避撞策略后直接通过飞行控制系统执行避撞操作。
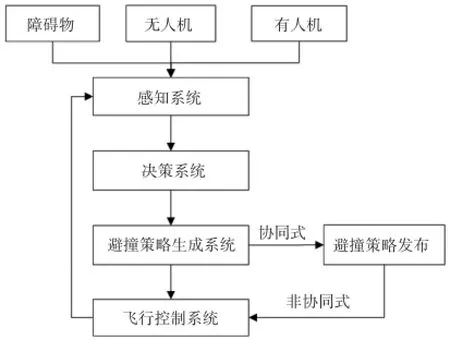
图1 感知与避撞系统结构
由于小型无人机受载重、功耗等限制,实现小型无人机的感知与避撞操作面临着更多的挑战。在无人机上所使用的协同式与非协同式传感器的技术特征对比表2所示[7]。
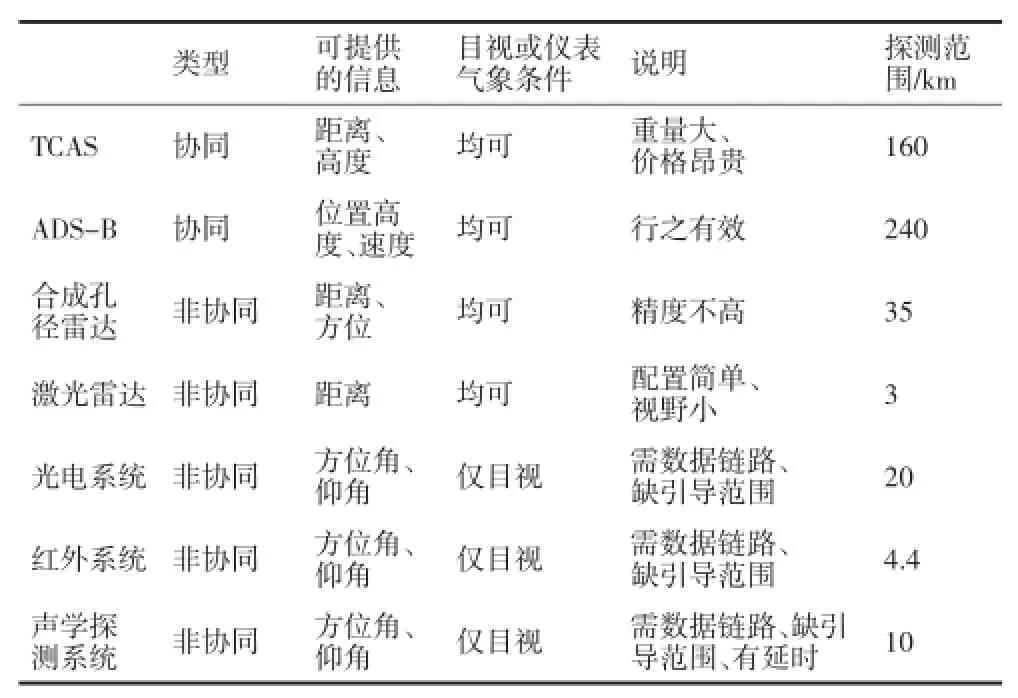
表2 协同式与非协同式传感器比较
1.1 协同式感知与避撞系统
空中交通警戒与防撞系统和广播式自动相关监视(ADS-B)属于协同式感知探测设备,能够精确全面的获取装载同类设备的目标飞机的状态信息,但探测目标受限,不能有效地检测出地面目标。
TCAS能够探测在探测范围内装有机载应答机的任何飞机,若目标飞机也装有TCAS还可以对冲突进行协调避让从而提高飞行的安全性,其最初设计是用于载人飞行,也可用于无人机,但是,其昂贵的价格可能会妨碍TCAS在无人机领域的应用。另外,由于无人机载荷限制十分苛刻,该系统在小型无人机上并不能直接使用。
ADS-B是一种相对较新的技术,为防撞提供了巨大潜力。它不仅限于空-空监视,其使用空-地通信并具有取代二次监视雷达的潜力,采用类似于TCAS使用无线电信号发收发附近飞机的信息的方式,但ADS-B的一个重要且明显的区别在于其信息交换的类型。每架飞机实时播报自己的身份、三维位置、速度、航向和意图,这些信息是对于防撞系统非常有价值。随着ADS-B的越来越小型化,该系统在未来会逐步应用于无人机飞行。另外,可在机场周边某些重要障碍物上安装一套ADS-B系统,来改善其不能探测地面障碍物这一不足。
1.2 非协同式感知与避撞系统
光电、声学、红外探测系统以及合成孔径雷达、激光雷达等都属于非协同型传感器,不论探测目标是否携带同样的传感器,它都能感知探测到视场范围内的空中及地面目标,但其探测性能受到无人机姿态影响而存在盲区。
合成孔径雷达(Synthetic Aperture Radar,SAR)作为一种主动探测设备,通过多雷达脉冲对目标物成像[8]。无人机雷达近期研究进展主要有:(1)由美国宇航局喷气推进实验室开发的可重构极化L波段SAR,应用于无人机系统[9],这是一种带宽为80 MHz、有效距离为16 km的全极化雷达;(2)一种轻重量(230 g)的X波段多普勒雷达系统,开发应用于检测与识别微型无人机[10];(3)通用原子猎手B雷达原型,通常携带2~3个独立雷达阵列,覆盖航向上220°,高度上30°的范围,且不限于特殊无人机机型[11]。SAR可在任何天气条件下使用,但相比于光电系统,其图像获取实时性较差。
激光雷达(LIDAR)作为一种远程感知技术,已经在无人机领域广泛研究通过空间分布点精确坐标的相关搜集来绘制目标。它通过发射激光照射目标并反射来测量距离,能够识别3 km距离范围内的非垂直面以及小至直径5 mm的物体。但是其视野受到限制。
光电系统(EO System)的传感器目前已比较成熟,它所提供的信息不仅局限于用于图像平面内的目标检测与定位,由目标在图像平面中的位置所进一步推断出的相对航向信息可以用于评估碰撞危险(恒定的相对航向对应于高风险,而变化率大的相对航对对应于低风险)。此外,也可从中得到常用于控制目的距离信息并用于飞机机动。由于其优越的综合性能,基于光电系统的感知与避撞系统曾应用于全球鹰等无人机[12],另外该系统对比较轻巧,常用于小型无人机[13]。但是,光电传感方法仍面临诸多问题,其中最显著的挑战源自于空中环境的不可预测和不断变化的性质。特别是,对于可见光光谱的光电传感器,检测算法必须能够处理各种图像的背景(从蓝色天空云到杂乱的地面)、各种照明条件,以及可能的图像伪影(例如镜头眩光)。另外,由于受到不可预知的气动干扰和无人机的机动,加剧了相机传感器的图像抖动。对于图像平面的检测算法,图像抖动引入不希望的噪声分量,会对性能产生一定影响。
红外系统(IR System)通过检测物体所辐射的红外线来感知潜在的物体。基于低分辨率(320*240像素)的红外图像的被动碰撞预警系统,采用了自适应技术以滤除测量噪声[14]。与光电系统相比,它不需要可见光,在夜间也可以使用。但是红外系统通常不适用于仪表气象条件,需要和其他传感器配合使用。
从螺旋桨飞机(声源)所发射的信号包含一种施加到宽带随机分量上的强窄带声调。无人机上的声学传感器就是利用这种特性来检测入侵飞机。相对于雷达或光电系统,它们的远距离探测能力较差,其性能也会受恶劣气候条件的影响而急剧降低。另外,在信号传输过程中会有时间延迟。
2 避撞决策机制与避撞策略生成方法
在接收到来自传感器的数据后,由决策机制来决定是否重新规划路径以避免潜在危险。最直观的是找到一个方法将飞行员决策特性应用到无人机中。P.Narayan等人,介绍了基于直觉决策的认知主导决策模型(RPDM)[15]。无人机感知与避撞决策方面的出版文献并不多,可以采用一些用于无人机其他功能的算法到感知与避撞决策中来。接下来,文章将介绍马尔科夫决策过程(Markov Decision Process,MDP)及其在无人机避撞中的应用。
MDP是一个基于随机模型的完善的框架,它通过将系统分离成有限个“状态”和“行为”来生成优化目标函数的决策规则。在MDP的基础上,一些学者已经对无人机不确定性自主决策[16],无人机持久监视一般健壮管理方法[17]和模型不确定性下的无人机规划[18]分别进行了研究。设计任务系统的健壮管理系统能够选择“行为”来抵消系统异常的不利影响[17]。
MDP包括一个容量为N的有限状态空间s∈S和一个容量为M的行为空间a∈A,状态转换分布Psa=P(sk+1|sk,ak),它表示状态s通过行为a转换至状态s'的概率。奖励模型R(s,a)代表在状态s并且采取行为a的所得到的奖励值。
决策问题的解即为策略,它是S到A的一个映射,即π:S→A.对于任何一个策略,可以通过执行该策略所获得的长期回报来评价其优劣。
对于任意策略π,定义其价值函数Vπ(s)为从状态s开始并执行策略的预期总回报,则有

其中,R(s)表示初始状态s的即时回报,0≤γ<1,为折扣因子,表明了未来回报相较于当前回报的重要程度。

最终的目的是找到使预期回报最大化的控制策略,即

值得强调的是,在MDP的一般公式的基础上,对无人机的具体问题可以改写成回报模型和目标函数[17-19]。
无人机空中交通冲突时的避让方法有两种:调高度和变方向。调高度属于垂直避让,它仍保持航向,但需改变发动机推力和指配高度层;变方向属于水平避让,它仍保持高度层,但会脱离指配航路[19]。
为了及时、高效地避让,无人机必须能够进行自主决策并采取主动避撞措施进行紧急避让。无人机的实时位置及方向即为MDP中的“状态”,而调高度以及变方向(包括上高度、下高度、左转向、右转向)相当于MDP中的“行为”,在选择方向之前,“感知与避撞”系统先感知自身以及地面和空中障碍物的“状态”,基于当前状态s可计算出采取不同行为a而获得的回报Vπ(s),通过前面的公式(1)-(4)可以得到一个使得预期回报最大的控制策略即为避撞策略[20-21]。
3 结束语
随着无人机技术与应用的极大发展,无人机与有人机集成空域成为制约无人机发展与空域优化的一个重要问题,无人机感知与避撞技术是其中一个关键点。本文从无人机感知与避撞系统的概念及其分类着手,详细比较了各感知与避撞传感器的特点,随后给出了马尔科夫决策过程的原理与及其在避撞中的应用,通过机载计算机计算相关参数,可以得到无人机的避撞策略。
为将非协同式传感器用于无人机“感知与避撞系统”,相关人员做了很多努力。近期,也有学者提出将无人机搭载ADS-B以实现感知与避撞功能,不同感器技术具有各自优缺点,如何确定传感器是否达到要求的统一的评价标准是一个很大的挑战,为提高超视距飞行的无人机感知与避撞性能,通常需要将几种传感器结合使用。无人机感知与避撞整个过程中,任何一个环节信息传输延迟都会降低整个系统的总体性能,如何提升系统的信息传输延迟稳定性也是很重要的。
[1]中国民用航空局飞行标准司.AC-61-FS-2016-20R1民用无人机驾驶员管理规定[S].
[2]International Civil Aviation Organization.Circular 328 AN/ 190 Unmanned aircraft systems(UAS)[S].
[3]Stephen P.Cook,Dallas Brooks.A Quantitative Metric to Enable Unmanned Aircraft Systems to Remain Well Clear[J]. Air Traffic Control Quarterly,2016,23(2/3):137-156.
[4]United States Department of Defense(DoD).Version 2.0,Unmanned Aircraft System Airspace Integration Plan[S].
[5]毕红哲,张洲宇,申功璋,等.无人机感知与规避技术研究进展[J].电子测量与仪器学报,2016(5):661-668.
[6]中国民用航空局飞行标准司.AC-61-FS-2013-20民用无人驾驶航空器系统驾驶员管理暂行规定[S].
[7]YU X,ZHANG Y M.Sense and avoid technologies with applicationstounmannedaircraftsystems:Reviewandprospects [J].Progress in Aerospace Sciences,2015,74(4):152-166.
[8]S.Lentilhac.UAVflightplanoptimizedforsensorrequirements [J].IEEE Aerospace&Electronic Systems Magazine,2010, 25(1):11-14.
[9]P.A.Rosen,S.Hensley,K.Wheeler.UAVSAR:new NASA airborne SAR system for research[J].IEEE Aerospace& Electronic Systems Magazine,2007,22(11):21-28.
[10]A.Moses,M.J.Rutherford,K.P.Valavanis.Radar-based detection and identification for miniature air vehicles[C]. Proceedings of the IEEE International Conference on Control Applications.Denver,USA,2011.
[11]M.P.Owen,S.M.Duffy,M.W.M.Edwards.Unmanned aircraft sense and avoid radar:Surrogate flight testing performance evaluation[C].IEEE Radar Conference.Ohio,USA,2011.
[12]J.D.Griffith,M.J.Kochenderfer,J.K.Kuchar.Electrooptical system analysis for sense and avoid[C].Proceedings of the AIAA Guidance,Navigation and Control Conference and Exhibit.Honolulu,Hawaii,2008.
[13]J.Kim,D.W.Lee,K.Cho,et al.Development of an electrooptical system for small UAV[J].Aerospace Science& Technology,2010,14(7):505-511.
[14]R.W.Osborne,Y.Bar-Shalom,P.Willett.Design of an adaptive passive collision warning system for UAVs[J].IEEE Transactions on Aerospace&Electronic Systems,2011,47
(3):2169-2189.
[15]P.Narayan,P.Wu,D.Campbell.Unmanning UAVs-addressing challenges in on-board planning and decision making[C]. Proceedings of the 1st International Conference on Humans Operating Unmanned Systems.Brest,France,2008.
[16]A.G.Shem,T.A.Mazzuchi,S.Sarkani.Addressing uncertainty in UAV navigation decision-making[J].IEEE Transactions on Aerospace&Electronic Systems,2008,44(1):295-313.
[17]B.Bethke,J.P.How,J.Vian.Group health management of UAV teams withapplications to persistent surveillance[C]. Proceedings of the American Control Conference.Seattle,US A,2008.
[18]L.F.Bertuccelli,A.Wu,J.P.How.Robust adaptive Markov decision processes:planning with model uncertainty[J].IEEE Control Systems Magazine,2012,32(5):96-109.
[19]王军,苏剑波,席裕庚.多传感器信息融合及其应用综述[J].控制与决策,2001,16(5):518-522.
[20]S Ragi,EKP Chong,UAV Path Planning in a Dynamic Environment via Partially Observable Markov Decision Process [J].IEEE Transactions on Aerospace&Electronic Systems,2013,49(4):2397-2412
[21]K.P.Valavanis,G.J.Vachtsevanos.Handbook of Unmanned Aerial Vehicles:UAV Guidance Algorithms via Partially Observable Markov Decision Processes[M],Springer Science+ Business Media Dordrecht,2015:1775-1810.
Research on Sense and Avoiding Method of Unmanned Aircraft System
ZUO Qing-hai,PAN Wei-jun,ZHUO Xing-yu,TAN Jing-wei
(Civil Aviation Flight University of China,Guanghan Sichuan 618300,China)
Integrating Unmanned Aircraft System(UAS)into the National AirspaceSystem(NAS)with reliable and safe operations is a key issue as the development of UAS.Sense and Avoid system(SAA)of UAS plays an important role during this process.One important function of SAA is to ensure the safety separation between UAS and other aircraft.This paper investigates the classification,application and operation of UAS.Then we introduce the concept and classification of UAS SAA and compare the characteristics of various types of perception system. Finally,we propose the SAA decision mechanism and method of generating collision avoidance strategy in UAS based on Markov Decision Process(MDP).
unmanned aircraft system;sharing airspace;sense and avoid;decision mechanism;avoiding strategy
V249
A
1672-545X(2016)11-0065-05
2016-08-22
军民航空管联合运行体系及效能评估研究(GKG201403001)
左青海(1993-),男,湖北孝感人,硕士,研究方向为空中交通管理;潘卫军(1968-),男,湖北黄冈人,博士,教授,副院长,研究方向为空中交通管理、计算机图形图像处理;卓星宇(1989-),男,四川成都人,硕士,研究方向为空中交通管理;谭经纬(1992-),男,四川成都人,硕士,研究方向为空中交通管理。