地面车辆的红外线图像轮廓的数字化识别方法应用研究
2017-01-07王会茹吕振华
王会茹, 吕振华
(清华大学 汽车工程系,北京 100084)
地面车辆的红外线图像轮廓的数字化识别方法应用研究
王会茹, 吕振华
(清华大学 汽车工程系,北京 100084)
面向车辆装备的红外线隐身特性评价问题,进行了红外线图像中地面车辆目标轮廓的数字化识别方法应用研究.首先,在对红外线图像的人工观察基础上,辅以图像放大处理,对地面车辆装备几何轮廓在红外线图像中的清晰程度进行判定;然后,综合运用、比较边缘检测算子、图像增强和图像分割等数字图像处理技术,研究确定了针对不同清晰程度的红外线图像处理、车辆轮廓提取的有效方法集,形成了一种进行红外线图像中地面车辆轮廓的数字化识别分析流程.
地面车辆;红外线图像;轮廓识别;数字化图像处理流程
在对战场装备的红外线侦察和装备的红外线特征及隐身效果评价等方面,对红外线图像中目标装备的轮廓几何特征的识别是基本的技术方法之一.该类方法以人工判读为主,借助于数字图像处理技术,实现对目标装备的轮廓识别和量化分析.
现代红外线侦察技术获得的目标装备的红外线图像有灰度图和伪彩色图两种,现主要讨论基于灰度图提取车辆目标轮廓特征的问题;对于伪彩色图,则可将其转换为灰度图像进行处理.
本文的目的在于研究形成一种提取地面车辆红外线图像轮廓特征的数字化处理流程.针对不同清晰程度的图像,将采用不同类型的、亦即图像处理深度和复杂程度不同的数字图像处理方法,以设法获得目标装备的特征轮廓信息.
1 图像放大、边缘检测方法与车辆轮廓较清晰的红外线图像处理分析
目标图像的边缘是最基本的图形特征,包含图像视觉的重要信息,是决定人眼识别目标的可能性及所用时间的主要影响因素[1].红外线图像中车辆装备轮廓的特点主要有:长-宽-高比值有一定的规律;车辆前、后方向上常具有倾斜面;大多数地面车辆顶部附加有形状复杂的装备等;地面车辆的发动机等动力装置热源的位置具有一定的规律性,例如轮式车辆的动力传动装置多是前置的,坦克车辆的动力传动装置多是后置的;对于动态地面车辆的红外线图像,车辆排气管及尾气、车轮或履带也是地面车辆的主要热特征源.在实际应用中,可依据地面车辆的以上热特征,通过数字化处理分析方法,识别红外线图像中地面车辆的轮廓特征.
1.1 图像放大与图像清晰度判定
图像放大是指通过增加图像的像素点数量,通过对原图像像素点的灰度值的插值运算,赋予新图像像素点灰度值,从而使图像尺寸变大,同时尽量保持图像的清晰程度,以便于对目标局部细节信息的观察,辅助判定目标在红外线图像中的清晰程度.
经典的图像放大算法有最近邻插值算法、双线性插值算法和双三次插值算法[2].最近邻插值算法是一种相近像素映射法,处理后的图像能较好地保留原图像的信息,但易出现马赛克图像及边缘锯齿现象.双线性插值算法输出的图像像素点的灰度值为其周围2×2邻域像素点灰度值的加权平均值,双三次插值算法输出的图像像素点的灰度值为其周围4×4邻域像素点灰度值的加权平均值,这两种方法能够较好地解决图像放大的锯齿现象,但使得边缘轮廓附近突变的灰度趋于连续,有利有弊.以Abrams主战坦克M1A2隐身前的红外线图像[3]为例,采用上述3种方法将其局部图像放大4×4倍,如图1所示.
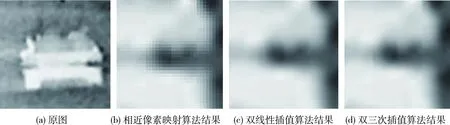
图1 M1A2主战坦克红外线图像及其放大4×4倍的局部
在实际应用中,希望通过图像放大操作,观察到更多目标装备的边缘细节信息,因此,当放大倍数较小、放大后图像的锯齿现象较弱时,可直接选用最近邻插值法放大图像;当放大倍数较大、锯齿现象较为明显时,需要选用双线性插值法或双三次插值法进行图像放大处理.
根据图像放大处理后车辆目标轮廓特征在红外线图像中的清晰程度,可对图像进行清晰度判别,并针对红外线图像中的车辆目标较清晰、较不清晰和很不清晰3种情形,分别探讨车辆目标轮廓提取的不同技术路线.
1.2 车辆轮廓较清晰的红外线图像处理分析
对于目标装备在环境背景中的红外线图像进行放大处理后,若目标装备边缘轮廓附近的灰度值有较明显突变,亦即其轮廓特征较清晰,对其直接应用边缘检测算子处理,往往即可得到较好的边缘轮廓识别结果.
边缘检测算子是一类基于图像局部灰度值不连续性的数字图像处理方法,主要依据函数一阶导数极值点及二阶导数零点指示图像灰度值突变信息的特征,确定目标装备与背景的边界.对于背景灰度值较为均匀、目标装备轮廓较清晰的红外线图像,利用一阶微分算子,如Roberts算子、Sobel算子或Prewitt算子[2],即可得到较为满意的边缘检测结果.以隐身前的M1A2主战坦克的红外线图像为例,Sobel边缘检测算子的处理结果较好,如图2所示.Sobel边缘检测方法首先计算图像灰度值在X、Y方向的梯度矩阵Gx=H⊗Ax、Gy=H⊗Ay,其中,H为红外线图像的灰度矩阵,Ax、Ay分别为X、Y方向的Sobel核函数系数矩阵,然后计算红外线图像灰度矩阵H的梯度矩阵G
(1)
再对处理后的梯度图选定显示阈值,给出目标边缘轮廓较清晰的二值化图像(即黑白图).

图2 M1A2主战坦克隐身前红外线图像的边缘轮廓提取
对于目标装备轮廓图像较清晰但背景中有树木、岩石等干扰的红外线灰度图像,需要采用LoG算子[2]、Canny算子[4]等进行处理.以CV90战车的红外线图像[5]为例,LoG边缘检测算子的处理结果较好,如图3所示.LoG算子先对图像进行Gauss低通滤波,然后利用基于Laplacian核函数系数矩阵的二阶微分算子对数字图像进行平面卷积运算,选定处理后二阶梯度图的显示阈值,给出目标边缘轮廓较清晰的二值化图像.
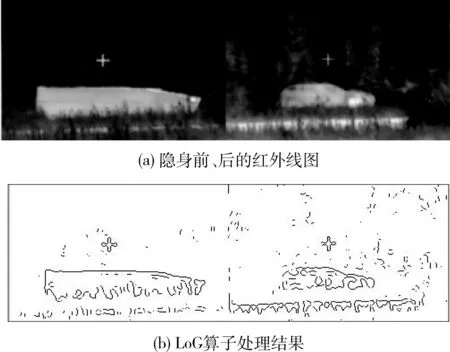
图3 战车CV90红外线图像的边缘轮廓提取
2 图像增强、分割方法与车辆轮廓较不清晰的红外线图像处理分析
对于目标装备处于环境背景中的红外线图像进
行放大处理后,若目标装备边缘轮廓附近的灰度值突变较不明显,亦即其轮廓特征较不清晰,对其直接应用边缘检测算子处理得到的目标边缘轮廓识别结果往往不够好.这时可从形状特征入手,利用灰度形态学和图像分割等方法,对目标边缘模糊的红外线图像进行了目标检测[6].现以隐身的M113A1 装甲运兵车红外线图像[3](如图4)为例,从图像增强和图像分割等方面探讨较不清晰的地面车辆红外线图像的处理分析.

图4 隐身的M113A1装甲运兵车的红外线图像
2.1 图像增强处理分析
然后采用伪彩色云图来表达梯度图像,并将梯度计算结果小于规定阈值gL的像素点设置为白色.图4中图像的伪彩色梯度示意图如图5所示.
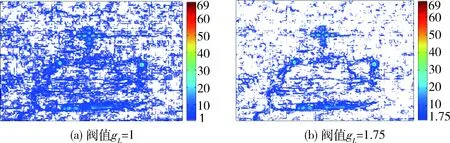
图5 隐身的M113A1装甲运兵车的红外线图像的梯度图
2.2 图像分割处理分析
采用数字化图像分割处理方法,可把图像分成各具特性的不同区域,并提取出感兴趣的局部区域图像.基于图像特征相似性的数字化图像分割算法,将图像分为若干不重叠的区域,每个区域内部的相似性大于区域间的相似性.具体方法有基于图像灰度阈值的阈值分割法、基于区域特征的区域生长方法等[2].
将图5(b)梯度图像和图4进行图像加运算,得到梯度算子锐化处理后的结果,如图6(a)所示.然后基于图像中灰度值相近性特征,对图6(a)进行基于全局阈值的分割处理,最后通过区域生长的方法获得目标边缘轮廓.
(1)基于灰度阈值的图像分割算法
阈值分割法是一种聚类分离法,是通过设定不同的特征阈值,把图像像素点划分为若干类别.具体方法有人工选择法和优选阈值分割法.Otsu优选阈值分割法[7]是一种有效的方法,它基于类间方差最大的原则优选阈值.设红外线图像的像素数为N,灰度范围为[0, L-1],L为原图像的灰度级数(通常为256),对应灰度值hi的像素数为Ni,其相对频次为
(2)
对于给定的灰度阈值gL,将图像中灰度值在[0, gL]之间的像素点归为C1类,灰度值在[gL+1,L-1] 之间的像素点归为C2类,于是有红外线图像的灰度均值为

C1和C2类的灰度均值分别为


定义灰度值的类间方差为
(3)

运用Otsu法对图6(a)进行阈值分割运算,得到的结果如图6(b)所示.
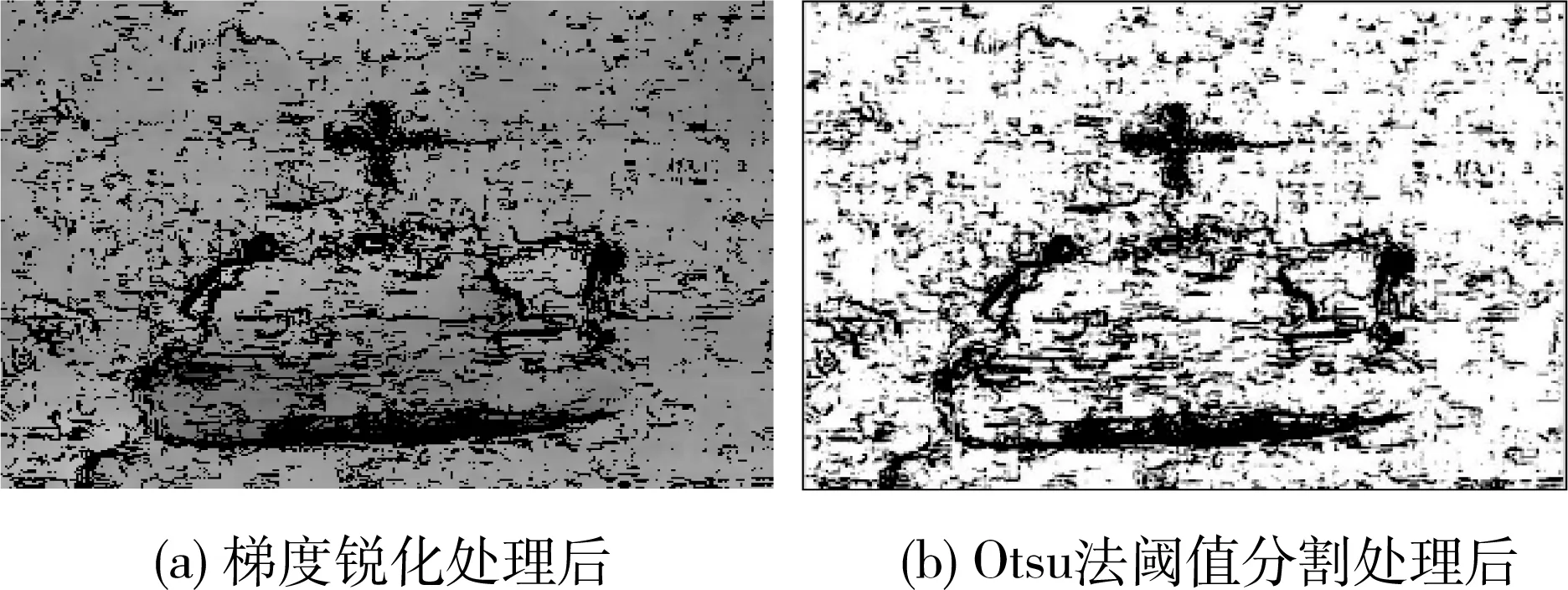
图6 采用Otsu法进行阈值分割前、后的图像对比
(2)基于区域特征的图像分割算法
对于经上述灰度阈值分割处理后得到的边缘轮廓信息较为突出的二值图像,进一步采用基于区域特征的图像分割算法中的区域生长法即可较好地提取出目标的边缘轮廓.此处区域生长法的实现过程是,首先结合红外线图像中地面车辆的外形特征确定初始种子像素的位置,然后将种子像素周围具有相同灰度值的像素归入初始种子像素所在的集合,用此原理向四周搜索,直到找不到满足条件的像素为止.对图6(b)采用区域生长的方法进行区域生长分割,得到较好的目标边缘轮廓,如图7所示.

图7 装甲车M113A1区域生长后的结果图
3 灰度均衡化方法与车辆轮廓很不清晰的红外线图像处理分析
对于目标装备很不清晰的红外线图像,通过人眼观察通常无法获得较可靠的装备目标信息,现以一种深度隐身的车辆装备的红外线热图(如图7)为例进行探讨分析.
该红外线图像中目标与背景的对比度较小,目
标边缘轮廓附近灰度的突变很不明显,故首先采用灰度均衡化法处理图像,增大其灰度对比度.灰度均衡化是通过一种变换,把已知图像演变成灰度分布频次较均匀的新图像,可通过MATLAB工具包中的histeq函数实现.首先根据原图像的灰度直方图,如图8(a),得到其灰度累计直方图,然后计算均衡化的图像灰度值,其与原图像灰度值之间的对应关系为[2]

(4)
对原图像的每一个具有不同灰度值的像素集,应用式(4)逐一计算,结果如图8(b)所示.
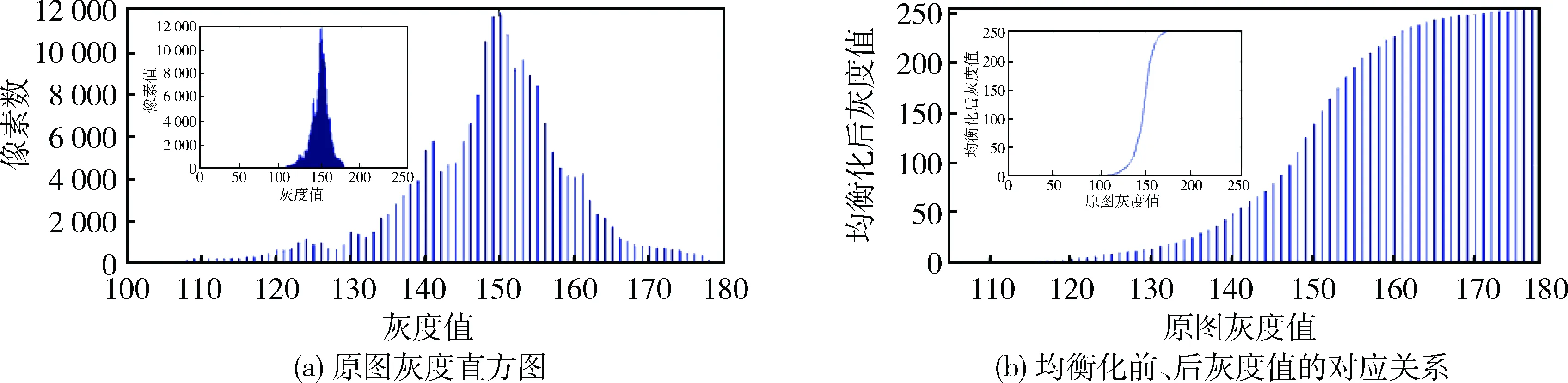
图8 直方图均衡化计算示意图
根据以上运算步骤,得到均衡化的灰度直方图及相应的新图像,如图9所示.可见,灰度均衡化法处理确实显著提高了图像的灰度对比度,使目标装备的边缘信息清晰了.但是,若要提取目标边缘轮廓,还需要采用边缘检测算子以及梯度锐化算子进一步处理图像.分别选用LoG边缘检测算子和梯度阈值锐化方法对其进行处理,结果如图10所示.可见,梯度阈值处理方法较好,这与前面的分析也是相符的.同时因为目标区域内的灰度梯度较小,所以结合梯度阈值gL=0和gL=3时的结果,基本可以识别出目标的边缘轮廓,但背景的干扰却无法消除,需要再次人工干预确定目标边缘轮廓.

图9 深度隐身的车辆装备的红外线图的灰度均衡化结果
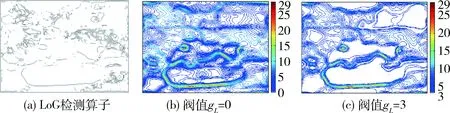
图10 灰度均衡化图像的边缘轮廓提取结果及梯度锐化图像
在处理分析目标装备轮廓很不清晰的红外线图像时所应用的数字图像处理技术,同样适用于前述较清晰和较不清晰的红外线图像的处理,只是对于目标装备轮廓特征清晰度较好的图像,可省略部分处理步骤.同理,若在分析清晰度较差的红外线图像时,仅采用边缘检测算法、梯度锐化法、优选阈值分割法等处理,往往得到的处理结果较差.
以上探索了不同清晰程度的红外线图像中地面车辆轮廓的数字化识别流程,如图11所示.
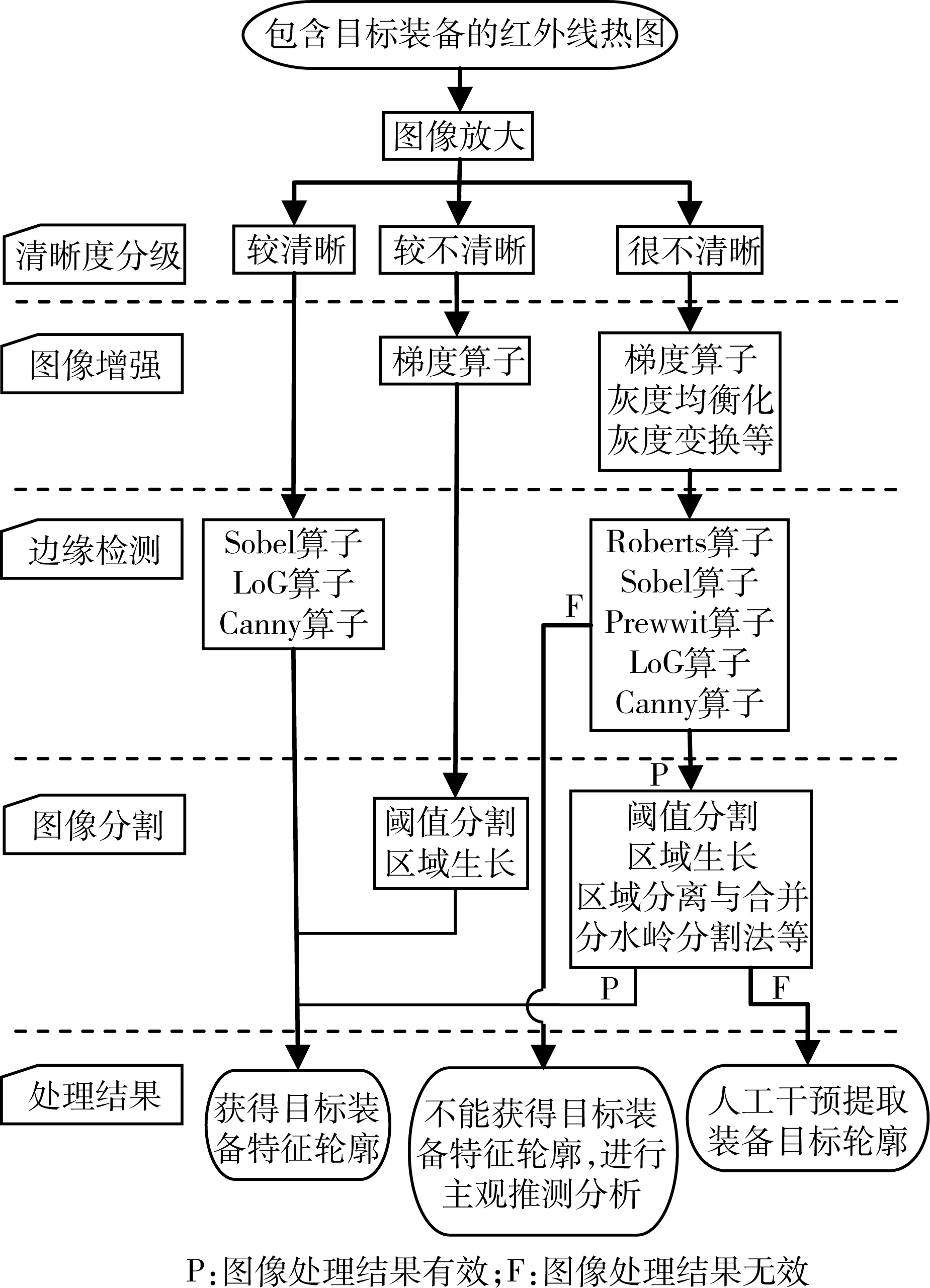
图11 红外线图像中目标装备轮廓识别方法流程
4 总 结
通过对边缘检测算子、梯度锐化算子、优选阈值分割法、区域生长法和灰度均衡化等多种经典数字图像处理方法在不同清晰程度的红外线图像中的应用探讨,选择确定了适用于多种清晰程度的地面车辆红外线图像的有效方法集,形成了一种地面车辆红外线图像几何轮廓数字化识别的流程,可用于进一步量化分析轮廓的几何特征,是进行地面车辆的红外线侦察和防红外线侦察的隐身性能评价的有效辅助技术.另外,在地面车辆红外线图像数字化处理技术研究领域,近年仍有较多关于各类算法的改进研究[8-13],具体如文献[9]和[10]对边缘检测算子的改进、文献[11]~[13]对灰度均衡化法和优选阈值分割法的改进等.在上述流程的实际应用中,可吸取这些改进算法,提高红外线图像的最终处理效果.
[1] Toet A. Structural similarity determines search time and detection probability [J]. Infrared Physics & Technology, 2010, 53(6): 464-468.
[2] 冈萨雷斯R C,伍兹 R E.数字图像处理[M].阮秋琦,阮宇智,译.2版.北京:电子工业出版社,2003.
[3] Crane D. Intermat stealth anti-thermal/IR camouflage tech for infantry and special operations forces [EB/OL]. (2005-04-22).http://www.defensereview.com/intermat-anti-thermalir-camo-tech-for-infantry-and-special-operations-forces/.
[4] Canny J. A Computational Approach to Edge Detection [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1986,8(6): 679-698.
[5] BAE System. ADAPTIV-A unique camouflage system[EB/OL].http://www.baesystems.com/en/feature/adativ-cloak-of-invisibility.
[6] 高 晶,孙继银,吴 昆,等.基于形状特征的红外目标检测方法[J].激光与红外,2013,43(1): 49-53.
[7] Nobuyuki Otsu. A Threshold Selection Method from Gray-Level Histograms[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1979, 9(1):62-66.
[8] 李开明,张 群,罗 迎,等.地面车辆目标识别研究综述[J].电子学报,2014,42(3):538-546.
[9] 夏 清,张振鑫,王婷婷,等.基于改进Sobel算子的红外图像边缘提取算法[J].激光与红外,2013,43(10):1158-1161.
[10]贺 强,晏 立.基于LOG和Canny算子的边缘检测算法[J].计算机工程,2011,37(3): 210-212.
[11]李 旭,赵文杰,杨凯达.基于小目标预提取的OTSU分割方法 [J]. 红外技术, 2013, 35(8): 492-496.
[12]陈 峥,吉书鹏.一种基于Otsu法和平台直方图均衡的红外线图像增强算法[J].激光与红外,2010,40(4):438-441.
[13]龚昌来,罗 聪,杨东涛,等.基于加权直方图均衡的红外图像增强方法[J].激光与红外,2013,43(8):956-959.
Applied Research on Digitalized Identification Procedure ofGround Vehicle Profile in Infrared Image
WANG Hui-ru, LÜ Zhen-hua
(Department of Automobile Engineering, Tsinghua University, Beijing, 100084, China)
An applied research on the digitalized identification procedure of a ground vehicle profile in infrared image is carried out in order to evaluate its infrared stealth characteristics for the vehicle equipment. Through enlarging and observing the infrared image of the equipment, a clearity classification of its profile is defined in the infrared image. A series of digital image processing methods, such as the edge detection algorithm, the image enhancement and the image segmentation, are used comprehensively for several existing infrared photos. A set of effective methods for extracting the vehicle profile image is suggested on the different definition levels. A procedure of the digital identification and analysis is presented for the ground vehicle profile in infrared image.
ground vehicle; infrared image; profile identification; digitalized image processin-g procedure
1009-4687(2016)04-0007-06
2016-5-9
王会茹(1992-),女,硕士,研究方向为地面车辆红外线隐身技术的研究.
TP751.1
A