我国CGCS2000坐标框架与全球ITRF2008框架的融合研究
2017-01-06李志才孙占义张庆兰
李志才,孙占义,张庆兰,张 鹏
(1. 国家基础地理信息中心,北京100830; 2. 导航与位置服务国家测绘地理信息局重点实验室,北京 100830)
我国CGCS2000坐标框架与全球ITRF2008框架的融合研究
李志才1,2,孙占义1,2,张庆兰1,2,张 鹏1,2
(1. 国家基础地理信息中心,北京100830; 2. 导航与位置服务国家测绘地理信息局重点实验室,北京 100830)
基于我国现有CGCS2000地心坐标框架及国际上现行的ITRF2008坐标参考框架,总结了我国区域坐标框架与国际坐标框架的融合方法,并利用陆态网络2015年计算的精密结果进行了验证。研究结果表明,强制约束法能实现中国区域框架与全球坐标框架的融合,而参数转换法及框架转换能实现两类坐标框架的相互融合;参数转换法可很好地解决区域CGCS2000框架与全球框架的融合,其转换精度与现有CGCS2000框架的精度高度相关;框架转换法能实现区域CGCS2000框架与全球框架的融合,但其与框架点解算的速度场精度高度相关,如果要进行高精度框架维持,框架点计算的速度场精度必须可靠。
CGCS2000坐标框架;ITRF2008框架;融合;转换
我国从2008年7月1日起正式启用2000国家大地坐标系统(CGCS2000)作为国家法定的坐标系,作为我国新一代的平面基准,该坐标系定义为ITRF97框架,2000.0历元,主要由30个左右的国家级GNSS连续运行基准站网及2542个GPS网点组成,当前我国的所有坐标观测成果都应归算到这一框架下[1-4]。而目前国际上采用的地心坐标框架是ITRF2008,是对4种空间大地测量技术VLBI、SLR、GPS和DORIS的不同年份观测数据进行重新处理后的国际地球参考框架精化版本,由580个站址的934站组成,其中463个在北半球,117个在南半球。包括装备有目前运行的两个及以上技术手段的84个并置站,提供各技术之间的局部联系,是当前国际上应用最广泛的全球坐标框架[5-6]。从当前技术发展来看,不同坐标框架的转换技术已经非常成熟,尤其是国际地心坐标参考框架ITRF97、2000、2005、2008系列,由于建立了框架点速度场,因而不同框架之间均有对应的转换参数,框架点转换非常方便[5-9]。而我国CGCS2000坐标框架点由于缺乏必要的速度场信息,因此导致当前的框架转换存在着一定的困难。尽管国内有部分学者提出基于GPS速度场建立了框架的转换关系,但其速度场框架为ITRF2005框架[7]。目前国内研究ITRF2008框架与我国CGCS2000框架的转换,大多基于国内IGS站在不同框架下的坐标和速度场,而利用国内框架站进行相关的研究并不多见。本文主要整理了目前全球框架与区域框架的强制约束法、参数转换法及速度场拟合法3种转换方法[7-10],利用国内框架站研究这几种方法的差异,并给出试验的结果,以供我国区域框架与全球框架的转换使用。
一、区域框架与全球框架的转换方法研究
基于已有的研究工作总结,目前不同框架的转换方法主要包含以下几种。
1. 强制约束法
强制约束法指在最后网平差过程中,采用已知点坐标对基线进行强约束,将所有计算的结果强制约束到当前区域坐标框架下,这是当前我国工程领域应用最普遍的方法,大多数测绘工程均采用这一方法进行全球框架到区域框架的转换工作。在采用“非基准方法”进行平差时,对地面点测站的约束较为松弛,首先进行类似于自由网平差的解算,并不进行固定,然后再对整个网形进行坐标参考框架的定义、约束和旋转,最后得到最终的“非基准方法”解。利用GAMIT解算的H文件提供的测站坐标、卫星轨道值及有关的方差-协方差阵,可以对测站与卫星轨道参数,以及极移和地球自转参数进行适当约束。通过与全球框架的GNSS连续观测网相连,对某些IGS站点施加一定约束,从而将区域框架的坐标成果与全球坐标地心坐标系统相连,得到这些点在全球地壳运动模型中的位移及位移速率,该方法也实现了区域框架到全球框架的融合。由于中国区域框架点缺乏正式公布的速度场信息,因而导致该方法不能互转。
2. 参数转换法
参数转换法,也叫相似变换法,是根据同一站点在区域框架和全球框架下的不同坐标、速度值,利用坐标转换模型,求解转换参数,确定转换关系,通过最小二乘方法计算出两种框架之间的转换参数,实现区域框架到全球框架的融合。坐标转换模型采用经典的七参数模型或14参数模型。七参数模型指的是3个平移参数、3个旋转参数和1个尺度参数。如果考虑到参考框架的时变,则需要14个参数,即上述7个参数再加上其对应的时间导数。包含测站坐标的函数模型为
(1)
可简化为
X2=X1+AsW
(2)
式中,W=[T1T2T3R1R2R3D]T,为7个转换参数的向量;As为设计矩阵。将上式转换为误差方程得
V=AsW-(X2-X1)
(3)
其对应的法方程为
(4)
利用最小二乘方法可计算出两种框架之间的转换参数,即可实现区域框架与全球框架的相互融合。
3. 框架转换法
框架转换法指根据ITRF网站公布的框架转换参数,实现区域框架与全球框架的相互转换。主要包括两个步骤,即历元转换及框架转换。历元转换是在同一框架下将框架点的瞬时历元坐标成果转到某一固定历元,如ITRF2008框架点对应的坐标历元为2005.0,而ITRF2005框架点对应的坐标历元为2000.0,我国CGCS2000框架点的坐标对应历元为2000.0。根据如下公式进行同一框架下不同历元间的坐标转换
(5)
式中,(X2,Y2,Z2)表示转换后坐标;(X1,Y1,Z1)表示转换前坐标;T2为转换后历元时刻;T1为转换前历元时刻;(Vx,Vy,Vz)为框架点的速度场,一般由国际相关机构发布并使用。通过式(5),可对同一框架下的坐标进行历元转换,再进行框架转换。目前国际ITRF网站公布了不同框架的相互转换参数,直接利用式(1)可进行不同框架间的转换,如ITRF2008框架到ITRF97框架的转换参数见文献[8]。框架转换法实现了区域框架与全球框架的精密融合,且可相互进行转换。
二、试验验证
以上3种方法各有利弊,严格来说,如果框架点足够多且精度较高,方法1是最好的,目前国际上各大数据分析中心大多采用这一方法进行框架确定,但该方法并不适用于我国,主要原因是我国区域具备速度场的框架点太少,在实现框架转换时,容易带来误差;方法2比较容易实现,只要有4个以上公共点即可求解转换参数,目前国内大部分工程单位均采用这一方法进行转换,但不适用大区域转换;方法3类似于方法2,但依赖于国际框架的转换参数精度。为验证以上3种方法的计算精度,本文将利用“陆态网络”2015年的精密计算成果,进行3种方法的验证。
采用方法1描述的计算方法,在单天解时利用无基准约束法,平差时采用全球框架站的SNX文件与中国区域“陆态网络”站计算的SNX文件进行联合平差,以全球IGS框架站为约束,将“陆态网络”区域站的计算结果与全球框架站进行融合,实现了“陆态网络”单天解在全球ITRF2008框架下的计算成果。再将2015年全年365天的单天解进行联合平差,获得”陆态网络”站点在ITRF2008框架下的站坐标及速度场,其坐标历元为2015年7月2日。其平差的RMS值为1.4 mm,计算结果可靠。具体计算方法见文献[3],在此不再赘述。
采用方法2,挑选了BJFS等20个CGCS2000框架点进行精度评定。根据BJFS等20个基准站的CGCS2000坐标及ITRF2008框架下的坐标,利用式(3)求得公共参数,再将其代回式(1),即可求得其残差。在计算过程中将残差超过0.3 m的点作为粗差剔除,不作为求解转换参数的点,共剔除KMIN、LHAS、TASH、WUSH、XIAG等5个残差较大的点。图1给出了BJFS等15个框架点转换前后的残差,大部分点残差在3 cm以内。从表1可以看出,该方法解算的框架转换误差在x、y、z3个方向上分别为2.7、3.1、3.7 cm。这与CGCS2000框架的精度大致相当。

图1 参数转换法计算的各框架点坐标残差

表1 参数转换法计算精度统计 m
采用方法3,根据方法1 BJFS等20个基准站计算所得ITRF2008框架下的瞬时坐标及站速度,利用式(5)首先将其转换到2000.0历元时刻的坐标,再根据文献[8]中的ITRF08框架到ITRF97框架的转换参数,将这20个框架点计算的坐标转换到ITRF97框架,获得其在CGCS2000框架的坐标成果,将其与已知的CGCS2000框架点坐标求差,即可获得该方法下的转换精度。图2给出了BJFS等18个框架点转换前后的残差,大部分点残差在5 cm以内。从表2可以看出,该方法解算的框架转换误差在x、y、z3个方向上分别为3.5、3.8、3.7 cm,略大于CGCS2000框架3 cm的精度,也比文献[7]中结果略大。考虑本文“陆态网络”点仅计算了2015年的数据,而文献[7]采用了1999—2009年长达10年的速度场结果,一年的速度场结果并不能完全代表该框架点的运动信息,如果能有更长时间的速度场结果,计算的框架点的精度将会更高。同时这也说明框架点的维持与速度场精度高度相关,如果要进行高精度框架维护,必须利用长期连续观测的数据结果进行评定。该方法发现YONG点转换误差较大,经检查发现YONG点2015年只观测了半年时间,导致在平差中该点速度场的精度不够,也说明速度场精度与转换精度高度相关。KMIN点转换误差也较大,也与其速度场精度不高有关。
三、结 论
基于我国现有CGCS2000地心坐标框架及国际上现行的ITRF2008框架,总结了我国区域坐标框架与国际坐标框架的融合方法,并利用“陆态网络”2015年计算的精密结果进行了验证。研究结果表明:
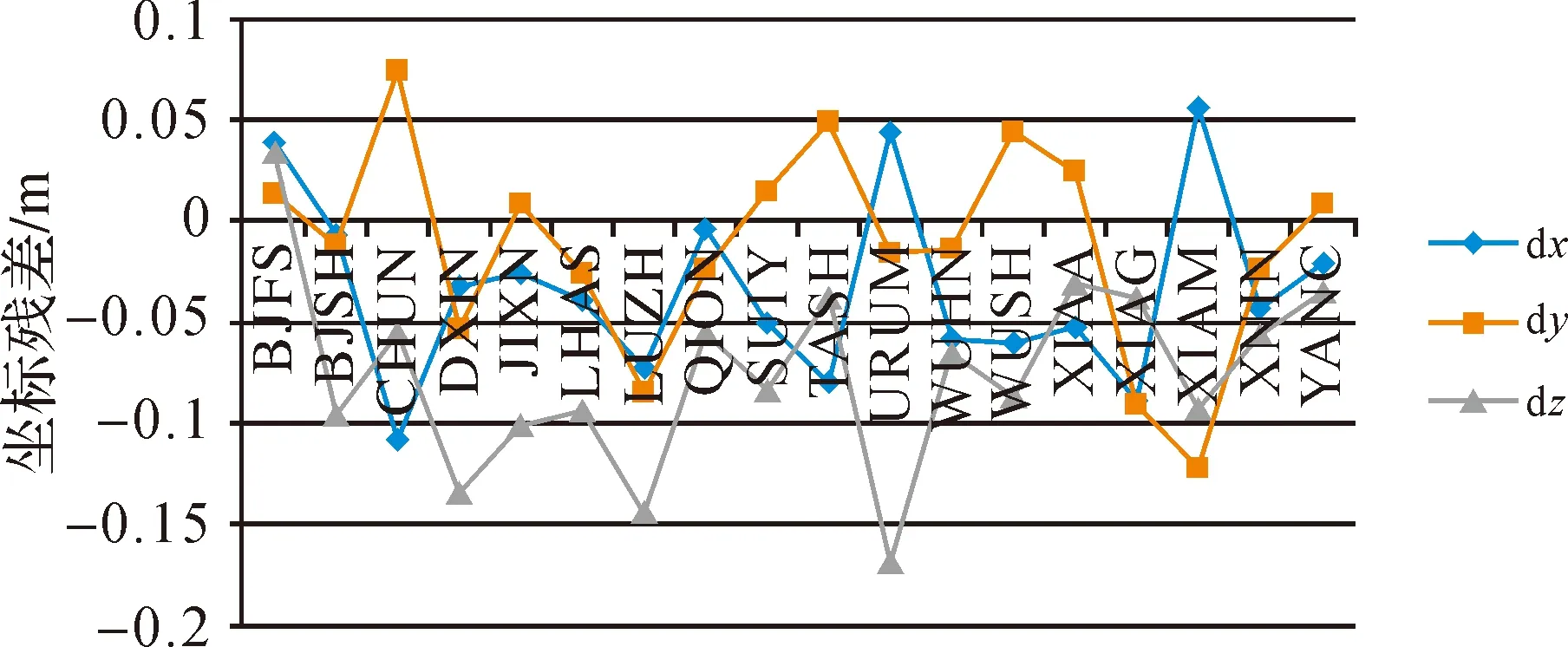
图2 框架转换法计算的各框架点坐标残差

表2 框架转换法计算精度统计 m
1) 强制约束法能实现中国区域框架与全球坐标框架的单向融合,而参数转换法及框架转换能实现两类坐标框架的相互融合。
2) 参数转换法可很好地解决区域CGCS2000框架与全球框架的融合,其转换精度与现有CGCS2000框架的精度高度相关。
3) 框架转换法能实现区域CGCS2000框架与全球框架的融合,但其与框架点解算的速度场精度高度相关,如果要进行高精度框架维持,框架点计算的速度场精度必须可靠。
[1] 陈俊勇.中国现代大地基准:中国大地坐标系统2000(CGCS2000)及其框架[J].测绘学报,2008,37(3):269-271.
[2] 魏子卿.2000中国大地坐标系及其与WGS84的比较[J].大地测量与地球动力学,2008,28(5):1-5.
[3] 张鹏,李志才,孙占义,等.我国高精度地心坐标框架确定方法研究[J].测绘通报,2015(12):1-4.DOI:10.13474/j.cnki.11-2246.2015.364.
[4] 程鹏飞,成英燕,文汉江,等.2000国家大地坐标系实用宝典[M].北京:测绘出版社,2008.
[5] ALTAMIMI Z,COLLILIEUX X,MÉTIVIER L.ITRF2008:An Improved Solution of the International Terrestrial Reference Frame[J].Journal of Geodesy, 2011,85(8):457-473.
[6] 成英燕.ITRF2008框架简介[J].大地测量与地球动力学,2012,32(1):47-50.
[7] 程鹏飞,成英燕,秘金钟,等.CGCS2000板块模型构建[J].测绘学报,2013,42(2):159-167.
[8] ITRF.ITRF2008[EB/OL].[2016-01-28].http:∥itrf.ensg.ign.fr/doc_ITRF/Transfo-ITRF2008_ITRFs.txt.
[9] 蒋光伟,程传录,郭春喜,等.地球参考框架ITRF2008在中国大地基准中的应用[J].大地测量与地球动力学,2012,32(2):86-89.
[10] 蒋志浩,张鹏,秘金钟,等.基于CGCS2000的中国地壳水平运动速度场模型研究[J].测绘学报,2009,38(4):471-476.
Research on Coordinate Reference Frame Fusion from Regional CGCS2000 to Global ITRF2008
LI Zhicai,SUN Zhanyi,ZHANG Qinglan,ZHANG Peng
2016-03-28
国家863科技项目(2013AA122501);国家测绘地理信息局公益性行业专项(201512001;201512004);国家自然科学基金(41274030)
李志才(1976—),男,博士,高级工程师,主要从事卫星大地测量研究。E-mail:zcli@nsdi.gov.cn
李志才,孙占义,张庆兰,等.我国CGCS2000坐标框架与全球ITRF2008框架的融合研究[J].测绘通报,2016(12):10-12.
10.13474/j.cnki.11-2246.2016.0390.
P228
B
0494-0911(2016)12-0010-03
