加速度环境中电机伺服系统控制研究
2017-01-06
(中国工程物理研究院总体工程研究所,四川 绵阳 621999)
加速度环境中电机伺服系统控制研究
吴静,欧峰,刘谦,杨敏
(中国工程物理研究院总体工程研究所,四川 绵阳 621999)
目的实现对动态飞行模拟器等多轴离心机吊篮系统的驱动,设计一种适用于加速度环境中的伺服驱动系统。方法推导电机简化模型,分析伺服系统的运行环境模型,建立离心场中的干扰模型。结果基于三相永磁同步电机转子磁场定向矢量控制,设计伺服驱动系统控制策略,实现电动执行器在加速度环境中的力矩加载控制。结论仿真和实验结果验证了该控制策略的有效性和该伺服系统的可行性。
加速度环境;伺服系统;矢量控制;永磁同步电机(PMSM)
WU Jing
OU Feng
LIU Qian
YANG Min
现代先进战机在空中进行飞行训练时,将不可避免地出现超机动动作,从而产生持续性高过载,将诱发飞行员意识丧失,短暂黑视,空间定位错觉,严重影响飞行员对战场态势的判断,对飞行员的安全构成严重的威胁[1—2]。为了提高飞行员的飞行技能,需预先进行地面模拟试验,对飞行员进行高过载耐力训练,以提高飞行员对高过载环境下的操纵熟练程度和承受能力。
地面模拟训练中,动态飞行模拟器(DFS,Dynamic Flight Simulator)将空战环境模拟和战术模拟系统融合,通过三自由度的协调运动来产生持续性高过载,可以在地面以更安全、更低成本的方式对飞行员进行训练,提高飞行员在高过载环境下的飞行操作能力,从而提高战场生存率[3—8]。
DFS通过主轴驱动大臂的旋转来产生持续的加速度,与重力加速度合成综合过载加速度,再通过吊篮、中框的俯仰和偏转运动使过载加速度在某些特定方向分解成飞行员所需要的过载变化。因此,驱动吊篮俯仰运动的电机必须提供足够大的转矩和良好的控制性能,由于电机在离心场中运行比地面环境严酷得多,需研究驱动电机及其伺服系统在离心场中的运行特性,考核其使用的性能。
目前中国工程物理研究院自主研发的 DFS能达到最大过载加速度为15g(g=9.8 m/s2),加速度增长率10g/s[9]。进一步提高吊篮驱动电机的性能,对提高DFS的高动态性能,促进DFS发展颇具意义。
1 加速度环境电机控制系统建模
DFS吊篮驱动电机的启动必须要在安全允许范围内具有尽可能的快速性,而且在动态过程中还必须控制超调量,以保证飞行安全。永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有过载能力大、散热好、运行可靠、控制性能较好等优点,很好地符合了DFS驱动系统的要求。为了减轻质量,使用无框架PMSM作为驱动吊篮俯仰运动的核心部件。
1.1 电机简化模型
由于交流伺服电机的调节特性、机械特性具有非线性的特点,难以推导其精确的数学模型。采用小偏差线性化方法对机电过渡过程进行动态分析,从而得到交流伺服电机传递函数:

式中:Kc为增益系数,Kc=;Tm为伺服电机时间常数,Tm=;Ω为电机旋转角速度。
整个驱动器可简化为一个比例环节,比例系数为Kv。
通过对上述电动机与驱动器的简化,可得到整个系统的简化模型。若以速度指令电压U(t)为输入,电机转速ω(t)为输出,传递函数表示为:

式中:K为系统增益,K=KcKv;T为系统机电时间常数,T=Tm。
1.2 运行环境模型
不同于地面静止环境,离心机运行时,转臂在高速旋转过程中与空气发生摩擦,将产生气动干扰力矩。因此动态飞行模拟器的吊舱电机在驱动控制过程中难免受到加速度环境中非线性因素的影响,将严重干扰控制的精度与可靠性。因此加速度环境中电机输出的电磁转矩还需克服由摩擦、阻力等引起的干扰转矩。拟用Tf表示外因素引起的干扰转矩,Tj表示电机本身的阻转矩,TL表示折算到电机轴的负载阻转矩。则电机的力矩平衡方程可表示为:

根据试验数据对离心机模型的辨识,风阻可等效为离心机转速的二次函数,且二次项的系数随负载质量而变化。以a表示离心机的加速度,其与离心机的转速关系a=ω2r,可推导出以加速度为输入,气动力矩为输出的离心场气动力矩干扰模型:

式中:D(t)为风阻系数(可由试验数据获得);ΔD(t)为波动系数;r为离心机的有效半径。
在加速度环境中,力矩电机控制过程中常见的干扰还有电磁干扰,主要来自布线引起的感生电势干扰。由于离心机上电机控制布线条件的限制,驱动信号线与编码器的反馈信号均通过长电缆沿离心机转臂传输,与供电电缆排布较近。系统工作过程中,弱电信号受到供电电压强电信号的干扰,导致控制性能下降。因此本系统的信号线采用双绞屏蔽电缆,以实现降低布线引起的电磁干扰影响。
2 控制策略研究
2.1 控制系统设计
电机电磁转矩的控制品质直接影响整个控制系统的性能。为了确保系统的安全可靠性和操作的方便性,加速度环境中电机伺服驱动系统采用上下位机方式进行控制。上位机地面控制系统实现人机交互、离心力与电机扭矩的协调控制及状态监控;下位机系统固定于离心机转轴处的仪器舱内,主要实现驱动器和电机的控制。
上位机系统的数据采集模块利用给定关系式计算伺服电机给定扭矩Tref。离心机运行过程中,扭矩传感器实时采集电动缸实际输出扭矩T,伺服控制系统通过光电滑环将T发送给上位机控制系统,实现实时监控;上位机控制模块通过光电滑环将Tref实时发送给下位机伺服控制系统,伺服控制器根据Tref和T的偏差和控制算法得到控制信号。此控制信号通过现场总线技术传输给电机驱动器,调节驱动电机来控制输出扭矩的大小,从而实现加速度环境中电机伺服系统的控制。
特别地,电机的传动轴有一对角接触球轴承进行支承,可承担传动轴系各个方向的离心力作用,从而满足电机伺服系统传动轴系在加速度环境中的适应性要求。
2.2 矢量控制策略
PMSM采用三相交流供电,其数学模型具有非线性、多变量、强耦合特性,通常以矢量控制实现三相电机的解耦控制,改善电机运动方程的非线性,提高系统的控制品质,以满足高性能伺服驱动的要求。表面式结构的PMSM,在dq轴系中的转矩可表示为:

式中:ψf为转子永磁体磁链;is表示定子电流;β为定子三相基波合成磁动势轴线与永磁体基波励磁磁场轴线间的电角度。若不计温度和磁路饱和影响,转子永磁体磁链ψf为恒值。由式(5)可知,可以通过控制定子电流q轴分量iq来实现对电磁转矩Te的控制,且Te与iq之间具有线性关系。
PMSM矢量控制原理如图1所示。系统包含力矩环、速度环、电流环控制。

图1 永磁同步电机矢量控制原理Fig.1 The principle diagram of vector control of PMSM
DFS吊篮驱动电机伺服控制系统的给定指令是动态变量,系统需具有良好的跟随性能,以实现实时跟踪给定值的变化。加速度环境中存在气动力等非线性干扰,这就要求系统具有良好的抗扰性能,以抵抗外界扰动引起的变化。
速度环采用PID控制器,其输出限幅以得到转矩电流的给定值iqref,令idref=0以实现最大转矩电流比控制。PMSM 定子三相电流实测值ia,ib,ic经Clark变换和Park变换,得到同步旋转轴系的电流iq,id,电流调节器的输入分别为iqref与iq的偏差、idref与id的偏差,输出通过Park逆变换模块的变换,得到定子三相电流给定值iaref,ibref,icref,电流环采用PI控制。将ia,ib,ic分别与iaref,ibref,icref的差值,作为脉宽调制(Pulse Width Modulation,PWM)控制器的输入,PWM 控制器输出六路信号,作为三相全桥逆变器的控制信号,从而驱动电机运行。PWM控制器采用滞环比较控制,迫使各相电流ij(j=a,b,c)在滞环宽度 2Δhj(Δhj=max(ijref-ij),设定的最大电流偏差)内呈锯齿状地实时跟踪给定电流ijref的变化,从而有效控制各相电流的偏差。
Clark变换和 Park变换模块根据式(6)实现abc静止轴系中三相电流ia,ib,ic到dq旋转轴系中两相电流iq,id的变换。Park逆变换模块根据式(7)实现 dq旋转轴系中两相参考电流iqref,idref到abc静止轴系中三相参考电流iaref,ibref,icref的变换。

3 仿真与实验分析
3.1 伺服控制系统仿真与分析
为验证上述基于PMSM转子磁场定向矢量控制的有效性,采用Matlab/simulink软件建立系统仿真控制模型,如图2所示。同时搭建相应的伺服控制系统平台。仿真模型采用模块化建模思想,将系统分割为多个功能独立的子模块,主要包括力矩控制模块、速度控制模块、Clark变换和Park变换模块、Park逆变换模块、PWM 逆变控制模块以及干扰模型等。其中,干扰模型中除了风阻模型(式4)外,还施加了少量随机成分表示其他干扰。
令系统空载启动,系统达到稳态后,伺服控制系统输出扭矩T、三相定子电流ia,ib,ic仿真结果如图3和图4所示。
由仿真结果可看出,电动执行系统具有较好的伺服性能(如图3所示),在0.02 s前输出扭矩约为0,在t1=0.02 s和t2=0.1 s时刻,均能很快达到给定扭矩T1=10 kN·m,T2=20 kN·m。滞环比较控制得到的三相实测电流ia,ib,ic在滞环宽度内以锯齿状较好地跟踪给定电流的变化(如图4所示)。转速环中使用了PID控制器,电机快速启动,且启动的峰值电流较小,而且在动态过程中超调量较小,以保证飞行安全。
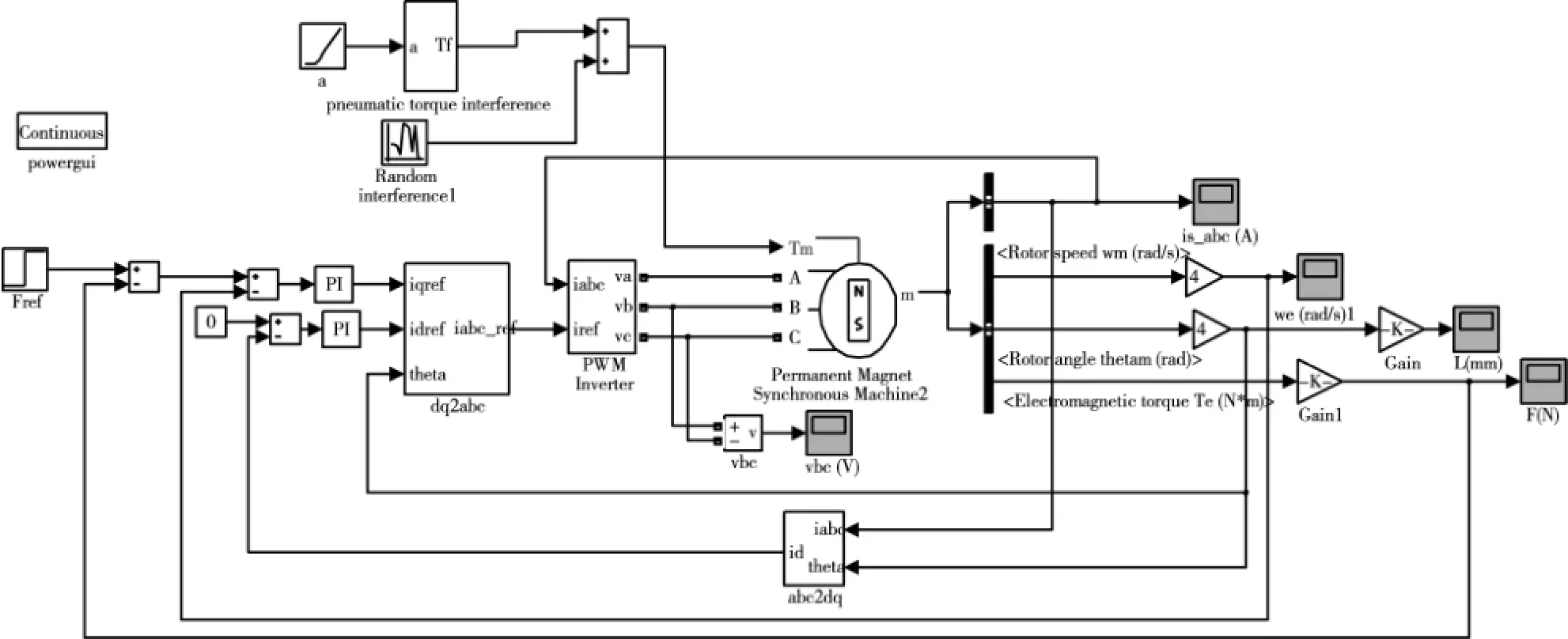
图2 永磁同步电动机矢量控制的伺服控制系统仿真Fig.2 Simulation model of servo control system based on PMSM vector control
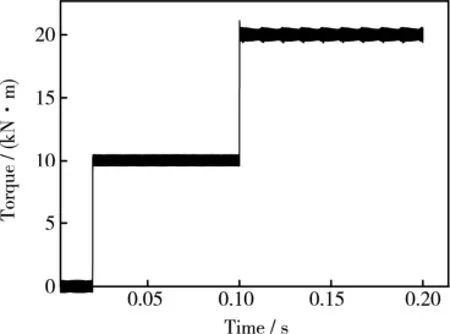
图3 力矩仿真曲线Fig.3 Simulation results of the torque

图4 电流仿真曲线Fig.4 Simulation results of the stator current
3.2 试验验证
电机驱动器及测量系统固定于转轴处仪器舱内,通过信号线实现对电机转矩的控制,并且通过光电滑环与地面控制计算机实现通讯。编码器与电机同轴安装,用以测量电机转速,电机与负载通过传动轴系联接,电机及负载整体安装于离心机吊篮中。以离心机实时运行的加速度为给定指令,开展电机性能试验,验证驱动电机扭矩的控制性能,试验结果如图5所示。

图5 试验结果Fig.5 Experiment results of the servo control system
从图5中可看出,加速度给定值在0~40g范围内变化,电机输出扭矩均能实时跟随加速度载荷的变化。电机位移变化也具有较好的对称性。扭矩在从0 kN·m增加到40 kN·m,在40 kN·m阶段保载60 s,再逐渐减小到0 kN·m的过程中,电机电流快速调节,以补偿干扰带来的影响。从图5中还可看出,实测的电机扭矩值与给定的加速度值误差较小,实现了加速度环境中基于 PMSM伺服系统的控制。
4 结论
文中采用上下位机方式对加速度环境中电机伺服驱动系统进行控制,设计三闭环控制策略对PMSM 伺服系统进行控制,实现了控制系统在0~40g加速度环境中的扭矩加载控制,电机驱动性能、实时跟随性能较好。通过对布线布局的优化,有效减少了电机所受的电磁干扰。通过加速度环境驱动电机伺服控制的实现,考核电机在加速度环境中的驱动性能,提高电机的控制性能,对促进DFS等多轴离心机,以及其他相关行业的发展颇具意义。
[1] 潘文俊, 王立新, 谭详升. 持续载荷飞行模拟器过失速机动过载模拟[J]. 北京航空航天大学学报, 2011, 31(6): 635—638. PAN Wen-jun, WANG Li-xin, TAN Siang-sheng. Simulator of G_Loads in Post-Stall Maneuver on Sustained G_Load Flight Simulator[J]. Journal of Beijing University of Aeronautics and Astromautics, 2011, 31(6): 636—638.
[2] 由勇, 由育阳, 由俊生. 持续载荷飞行仿真技术与工程设计[M]. 北京: 国防工业出版社, 2013. YOU Yong, YOU Yu-yang. Sustained Acceleration Flight Simulation Technology and Engineering Design[M]. Beijing: National Defense Industry Press, 2013.
[3] 由俊生. 动态飞行仿真系统载荷训练研究[J]. 系统仿真学报, 2002, 14(11): 1533—1535. Junsheng You. Research on High Acceleration Training of Dynamic Flight Simulation System[J]. Journal of System Simulation, 2002, 14(11): 1533—1535.
[4] 吴建国, 李海波, 张琪, 等. 综合离心环境试验技术研究进展[J].强度与环境, 2014, 41(1): 1—9. WU Jian-guo, LI Hai-bo, ZHANG Qi, et al. Advances in Synthesis Centrifugal Environment Test[J]. Structure & Environment Engineering, 2014, 41(1): 1—9.
[5] 方兵, 沈润杰, 何闻, 等. 综合离心环境试验技术研究进展[J]. 中国机械工程, 2009, 20(22): 2766—2772. FANG Bing, SHEN Run-jie, HE Wen, et al. ResearchSummary of the Multi-Parameter Combined Environment Test of Spacecraft Component Reliability[J]. China Machinery Engineering, 2009, 20(22): 2766—2772.
[6] O'SHEA P. Environmental Test Helps You Juggle Design Demands[J]. Evaluation engineering, 1997, 36(5): 38—40.
[7] 欧峰, 陈颖, 陈洪, 等. 基于离心机平台的复合环境试验系统综述[J]. 装备环境工程, 2015, 12(5): 28—33. OU Feng, CHEN Ying, CHEN Hong, et al. Review of the Compound Environment Test System Based on Centrifuge Platform[J]. Equipment Environment Engineering, 2015, 12(5): 28—33.
[8] 张东锋, 欧峰. 一类飞行器动态变化加速度模拟试验原理探索[J]. 装备环境工程, 2015, 12(5): 56—60. ZHANG Dong-feng, OU Feng. Simulation Test Principle for a Type of Aircrafts with Variable Accelerations[J]. Equipment Environment Engineering, 2015, 12(5): 56—60.
[9] 宋琼, 胡荣华. 动态飞行模拟器及其发展综述[J]. 装备环境工程, 2015, 12(5): 11—18. SONG Qiong, HU Rong-hua. Summarization of Dynamic Flight Simulator and Its Development[J]. Equipment Environment Engineering, 2015, 12(5): 11—18.
[10] 吴静,陈洪. 电动缸系统控制研究[J]. 西南科技大学学报, 2015, 30(4): 64—68. WU Jing, CHEN Hong. Study on control of electric cylinder system[J]. Journal of Southwest University of Science and Technology, 2015, 30(4): 64—68.
[11] 蒋海波, 崔新艺, 曾凌波. 无刷直流电机模糊控制系统的建模与仿真[J]. 西安交通大学学报, 2005, 39(10): 1116—1120. JIANG Hai-bo, CUI Xin-yin, ZHENG Ling-bo. Modeling and Simulation of Brushless DC Motor Fuzzy Control System[J]. Journal of Xi'an Jiaotong University, 2005, 39(10): 1116—1120.
[12] TANAKA K, SUGENO M. Absolute Stability Analysis and Design of Fuzzy Control Systems[J]. Networking, Sensing and Control, 2008, 45(2): 1721—1725。
[13] 牛宝良, 陈洪. 某离心机模型辨识与仿真[J]. 装备环境工程, 2015, 12(5): 61—66. NIU Bao-liang, CHEN Hong. Model Identification and Simulation of a Centrifuge[J]. Equipment Environment Engineering, 2015, 12(5): 61—66.
[14] 林正, 金阿水, 钟德刚. 永磁同步电机伺服控制技术的发展回顾[J]. 中小型电机, 2004, 31(6): 45—49. LIN Zheng, JIN A-shui, ZHONG De-gang. Servo Control of Permanent Magnet Synchronous Motors[J]. S&M Electric Machines, 2004, 31(6): 45—49.
[15] 张钊, 陈涛, 周勇. 永磁同步电机伺服控制系统建模与仿真[J]. 兵工自动化, 2014(4): 75—78. ZHANG Zhao, CHEN Tao, ZHOU Yong. Simulation and Modeling of Servo Control System of Permanent Magnet Synchronous Machine[J]. Ordnance industry automation, 2014(4):75—78.
[16] 连琨, 刘艳萍, 高美卿. 永磁同步电动机矢量控制[J].电机与控制应用, 2010, 37(12): 52—55. LIAN Kun, LIU Yan-ping, GAO Mei-qing. Vector Control of Permanent Magnet Synchronous Motor[J]. Electric Machines & Control Application, 2010, 37(12): 52—55.
[17] 余佩倡, 吴峻, 周文武. 永磁同步电机矢量控制系统设计[J]. 电力电子技术, 2011, 45(11): 105—107. Yu Pei-chang, Wu Jun, Zhou Wen-wu. The Design of Vector Control System of PMSM[J]. Power Electronics, 2011, 45(11): 105—107.
Study on Control of Motor Servo System in Acceleration Environment
ObjectiveTo achieve the drive for the gondola system of the dynamic flight simulator (DFS) and other multi-axis centrifuges, the servo control system adapted to acceleration environment is designed.MethodsThe motor simplified control model is derived. The operating environment model is analysed, and the interference model in the centrifugal field is established.ResultsBased on the rotor flux oriented vector control of three-phase Permanent Magnet Synchronous Motor (PMSM) and fuzzy control, the control strategy of the servo control system driven by the PMSM is designed, and the precise torque loading control of the electric actuator in the acceleration environment is realized.ConclusionThe simulation and experimental results verify the effectiveness of the proposed control strategy and the feasibility of the servo system.
acceleration environment; servo control system; vector control; permanent magnet synchronous motor (pmsm)
10.7643/ issn.1672-9242.2016.06.008
TJ86;TM303
A
1672-9242(2016)06-0041-06
2016-07-09;
2016-08-09
Received:2016-07-09;Revised:2016-08-09
国防科工局技术基础项目(JSHS2014212B001),中物院实验室技术基础课题(16S005)
Fund:Suported by the Technology and Industry for National Defence Technical Foundation (JSHS2014212B001), Laboratory Technology and Industry for China Academy of Engineering Physics(16S005).
吴静(1989—),女,四川人,硕士,助理工程师, 主要从事电气控制、环境试验技术等方面的研究。
Biography:Wu Jing(1989—), Female, Sichuan, Master, Assistant Engineer, Electrical control and environmental test technology.
