基于滑移率的双电机电动汽车转矩分配系统
2017-01-04李军伟李研强
郭 帅,李军伟,高 松,李研强
(1.山东理工大学交通与车辆工程学院, 山东淄博255049;2.山东省科学院自动化研究所, 山东济南250014)
基于滑移率的双电机电动汽车转矩分配系统
郭 帅1,李军伟1,高 松1,李研强2
(1.山东理工大学交通与车辆工程学院, 山东淄博255049;2.山东省科学院自动化研究所, 山东济南250014)
针对双电机驱动电动汽车车轮打滑引起的动力损失问题,引入采用模糊PID(比例积分微分)控制算法的踏板调整系数,建立了基于车轮滑移率的转矩动态优化分配方法,并利用美国NI公司的Motohawk搭建了整车模型和策略模型;在VeriStand的基础上研发了面向整车模型的上位机控制系统,应用Kvaser将策略下载到整车控制器内,实现了在D2P(快速原型设计)设备上的硬件在环仿真测试。测试结果表明,所建立的转矩分配策略可以合理的将转矩分配到前后轴上,同时可将前后轮的滑移率有效控制在10%以内,提高了电动汽车的效率和性能,为双电机电动汽车的转矩分配提供了有益参考。
双电机电动汽车;转矩分配;整车控制器;硬件在环仿真
0 引 言
双电机驱动电动汽车因动力源和电机之间采用电缆连接,缺少车轮打滑的预警信息,容易导致汽车动力不足或动力损耗[1]。如何合理有效地在双电机驱动电动汽车的转矩分配过程中采用一定的防滑机制,是保证汽车能够正常行驶,提高双电机驱动电动汽车经济性的重要举措。然而,由于双电机电动汽车结构较为复杂,其转矩分配控制策略比传统单电机驱动电动车复杂,目前关于车轮打滑后转矩分配策略的研究相对较少。
近年来国内外的研究人员虽然对电动汽车的转矩控制策略做了大量研究,例如,文献[2]以混合动力汽车为研究对象,通过离散化的方程优化设计转矩分配策略;文献[3]和文献[4]研究了双电机耦合驱动的电动汽车,提出了基于驾驶模式转变的转矩分配策略;文献[5]和文献[6]考虑到了系统的动力学特性,使所得到的转矩分配控制策略在瞬态条件下更加准确。但这些研究能够给出较为可靠的电动汽车转矩控制策略,然而由于没有考虑车轮打滑后的转矩分配策略,致使车辆打滑过程中损失较多动力。
本文以双电机驱动电动汽车的经济性为目标,将防滑机制应用到转矩分配策略中,利用车辆行驶过程中的前后车轮滑移率,对基于车轮滑移率的电动汽车转矩动态优化方法进行研究,以减少失去附着率一侧车轮的动力输出,降低能量损耗,并建立满足动力性要求的汽车整车模型和汽车整车控制器策略模型,在D2P(快速原型设计)设备上对策略模型进行硬件在环仿真测试,使优化后的扭矩分配策略能有效地提高电动汽车的效率和性能。
1 双电机驱动系统结构
双电机驱动电动汽车的前后轴是由对称且分别独立的电机单独驱动的,其动力系统结构如图1所示。其中,汽车前后轴电机的动力通过固定传动比的减速器、主减速器和差速器等传输到前轮和后轮;汽车整车控制器采集四个车轮的滑移率,实现转矩的再分配和优化,通过CAN总线将转矩信号发送给前后轴电机控制器,对前后轴电机直接驱动。

图1 双电机驱动系统结构Fig.1 Drive system structure of the dual motor
与传统单电机系统结构相比,双电机驱动结构可以提供更强的驱动力,可使汽车在相同驾驶条件下提升单个电机的负荷率,从而提高汽车的整体运行性能;与双电机单轴耦合驱动结构相比,该驱动系统布置紧凑,转矩分配、再生制动和空间布局可以更加合理[7]。
2 驱动控制策略
双轴驱动的电动汽车,由于轮胎气压不同或是轮胎磨损等因素而造成前后车轮滚动半径不相等,或因道路不平坦、汽车曲线行驶等因素,造成汽车前后车轮的行程产生差异,从而在汽车前后驱动桥之间产生功率循环,造成轮胎和其他零部件的磨损,额外损耗电机的功率。为了避免功率循环造成的功率浪费,电动汽车的转矩分配策略应按照前后轴轴荷比分别输出相应转矩驱动前后轴的车轮[8-10]。假设前后轴对应的前后传动系传动比相等、传动效率相等,转矩分配的闭环控制图如图2所示。
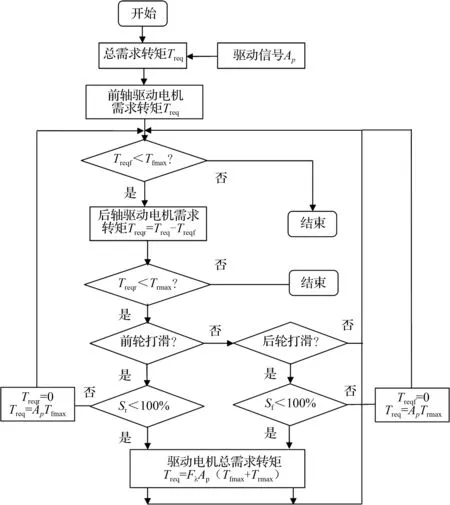
图2 双电机驱动转矩分配图Fig.2 Drive torque distribution diagram of the dual motor
2.1 车轮未打滑时转矩分配
由于初始转矩的分配与轴荷比成正比,前后轴轴荷即前后轮法向反作用力,其与汽车的总体布置、车身形状、行驶状况及道路坡度有关。汽车加速上坡的受力图如图3所示。

图3 汽车受力图Fig.3 Force diagram of the electric vehicle
图3中,α为道路坡度角,G为汽车车重,FW为空气阻力,Fj为加速阻力,Fi为坡道阻力,FZw1、FZw2为作用在车身上并位于前后轮接地点上方的空气升力,a、b为汽车质心至前后轴的距离,L为前后轴距,FZ1为前轮的法向反作用力,FZ2为前轮的法向反作用力。
若将作用在汽车上的诸力对前后轮与道路接触面中心取力矩,忽略掉旋转质量惯性阻力偶矩与滚动阻力偶矩之后,可得到前后轮的法向反作用力:
(1)
(2)
式中,hg为质心高度。
当车轮未打滑时,前后轴电机的转矩以及总的需求转矩满足以下方程,即:
(3)
(4)
Treq=Ap(Tfmax+Trmax),
(5)
式中,Treqf为前轴电机转矩,Treqr为后轴电机转矩,Treq为总的需求转矩,iT为传动系传动比,ηT为传动系效率,Ap为加速踏板信号,Tfmax为前轴电机最大扭矩,Trmax为后轴电机最大扭矩。
2.2 踏板调整控制算法
当车轮打滑时,车辆四个驱动轮滑移率定义为:
(6)
式中,Sfl、Sfr、Srl、Srr分别为左前轮、右前轮、左后轮、右后轮四个车轮的滑移率,ωfl、ωfr、ωrl、ωrr分别为左前轮、右前轮、左后轮、右后轮四个车轮的角速度,R为车轮半径,vx为纵向车速,其中在驱动轮加速情况下,车轮的滑移率为正,在驱动轮减速的情况下,车轮的滑移率为负。
驱动控制系统依据四个轮子Sfl、Sfr、Srl、Srr的滑移率判断车辆的行驶条件,根据踏板开度和踏板调整系数进行轴间转矩分配。前后轴滑移率计算如下:
(7)
(8)
(9)
Smax=max(Sf,Sr)。
(10)
当汽车行驶在高附着力的路面上时,四个驱动轮滑移率都在稳定的滑动区间,滑移率满足如下要求:
max(Sf,Sr)≤λ0,
(11)
式中,λ0是一般路面下车辆的滑移率,大小为10%~20%,这里取10%。因为汽车正常行驶时,轮胎最大纵向附着力的点出现在滑移率为10%左右,并且路面附着系数在这滑移率的这一区间内是先递增后减小的,同时比较低的车轮滑移率可以保证横向附着系数,从而有利于汽车的方向稳定性[5,10]。
当汽车行驶在低附着力的路面上时,四个驱动轮滑移率都在不稳定的滑动区间,滑移率满足如下要求:
min(Sf,Sr)≥λ0,
(12)
(13)
式中,λave是低附着力的路面上滑移率的均值。
当汽车行驶在混合型路面上时,前后车轮的附着力明显不同,滑移率满足如下条件:
max(Sf,Sr)≥λ0,
(14)
(15)
式中,λfr是车轮前后滑移率差的阈值。
为了减少滑移严重车轮的动力,以满足驾驶员的扭矩需求,引入踏板调整系数,车轮滑移率偏差变量设计[11-12]:
e=max(Sf,Sr)-λ0。
(16)
由于传统控制方法抗干扰能力相对较差,无法满足系统对控制精度的要求,所以采用模糊PID(比例积分微分)控制算法计算踏板调整系数,对踏板调整的比例、积分和微分系数kp、ki和kd应用模糊控制的方法进行调整。
当汽车前后轴开始发生滑移或是滑移结束时,由于车轮滑移率偏差e较大,为了加快系统响应速度,比例系数kp可以选取的较大;为了避免车轮滑移率的偏差e瞬时变大而导致微分过饱和使控制系统超出控制的允许范围,微分系数kd选取中等;为了避免车轮滑移率出现较大的超调量,而产生积分饱和现象,使积分系数ki=0。当汽车的前后轴正常工作后,车轮滑移率偏差e和滑移率偏差变化率大小为中等,为使车轮滑移率超调量较小,比例系数kp应选取小些,积分系数ki的取值要适当,而微分系数kd对系统响应速度会有较大影响,微分系数kd的取值要适中;当汽车前后轴转速基本恒定后,由于车轮滑移率偏差e较小,为了保持系统稳定性,应使比例系数kp和积分系数ki增大,同时为了提高系统的抗干扰能力,避免控制系统在设定值的区间范围内出现振荡现象,在车轮滑移率的偏差变化率较小时,微分系数kd取大些,车轮滑移率的偏差变化率较大时,微分系数kd取小些[13]。
根据以上分析内容,制定踏板调整系数PID模糊规则如表1。
表1kp、ki和kd模糊规则
Tab.1 Vague rules ofkp,kiandkd

e·ePBPSZENSNBPBNBPBPSNBPBZENSPSZENSPSZEZEZEPSPSNBPBPSNSPSZENSPSNSZEZENSPSNSNBZENBPSPSNSPSZEZEZENSPSNSNBPSNSNBNSNBZEPSZEZEZEPSNSNSPSNSNBPBNBNBNBZEZEPSPSNBZEPBNBZEPBNBZEPBNBPS

表1中的每一栏内有3个模糊规则,分别为比例系数kp、积分系数ki和微分系数kd的模糊规则,车轮滑移率偏差和车轮滑移率偏差变化率作为模糊控制系统的输入变量,比例系数kp、积分系数ki和微分系数kd为模糊控制系统的输出变量。
采用模糊PID控制算法计算的踏板调整系数,即
(17)
式中,Fλ0是踏板调整系数的初始值,一般设为1;kp、ki和kd是踏板调整的比例、积分和微分系数。
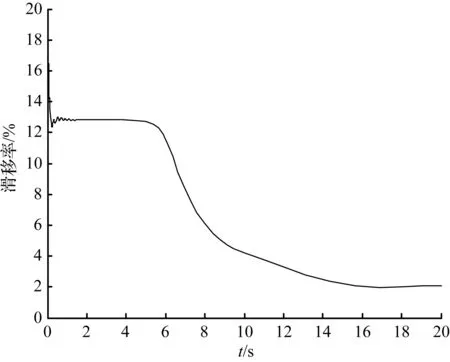
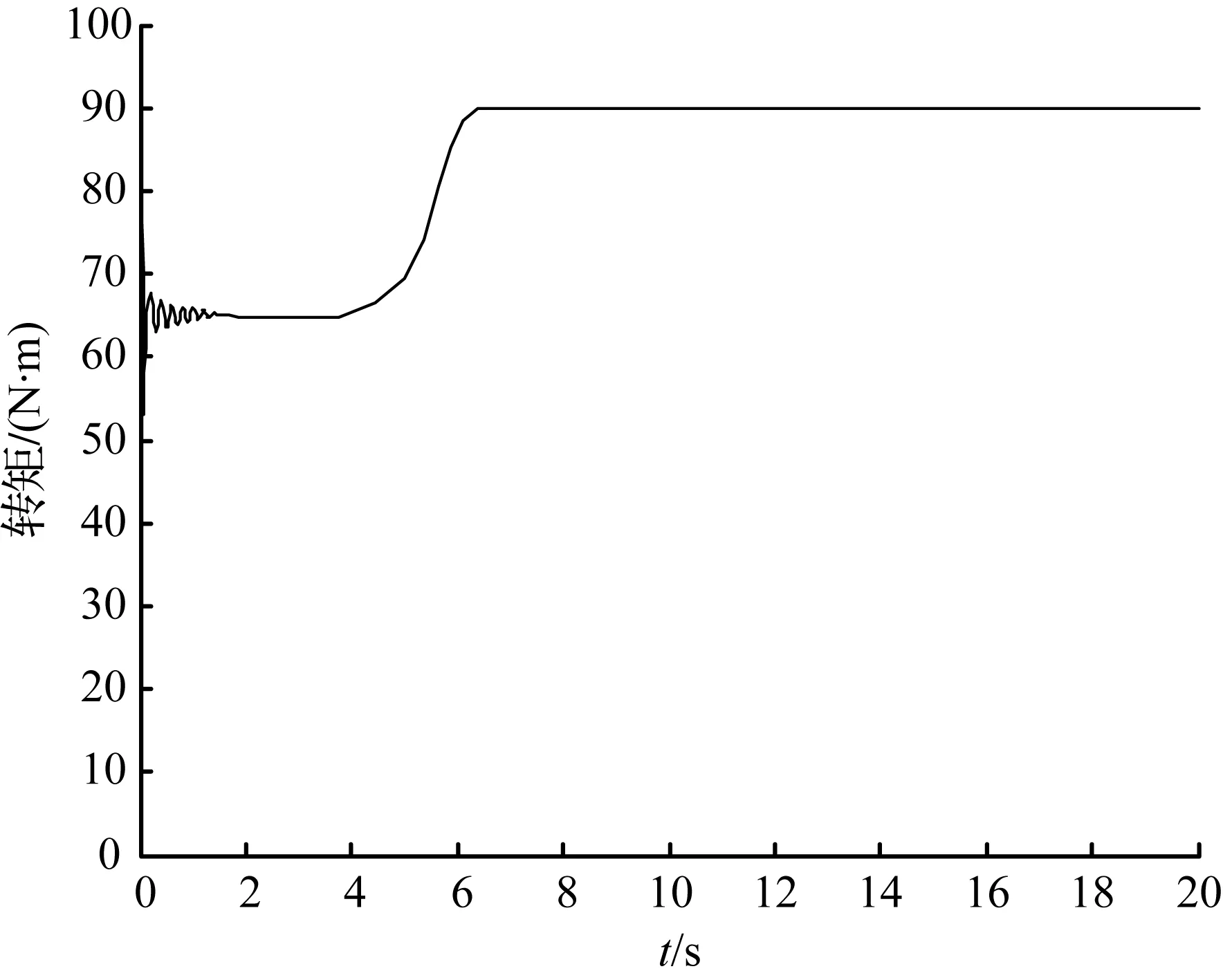
应用模糊PID控制算法计算得到踏板调整系数仿真曲线如图4所示,当前后轴车轮滑移率发生较大变化时,踏板调整系数Fλ会减小,从而减小动力损耗;当前后轴车轮滑移率维持在正常值且差值很小时,踏板调整系数会保持1不变。

(a) 滑移率曲线
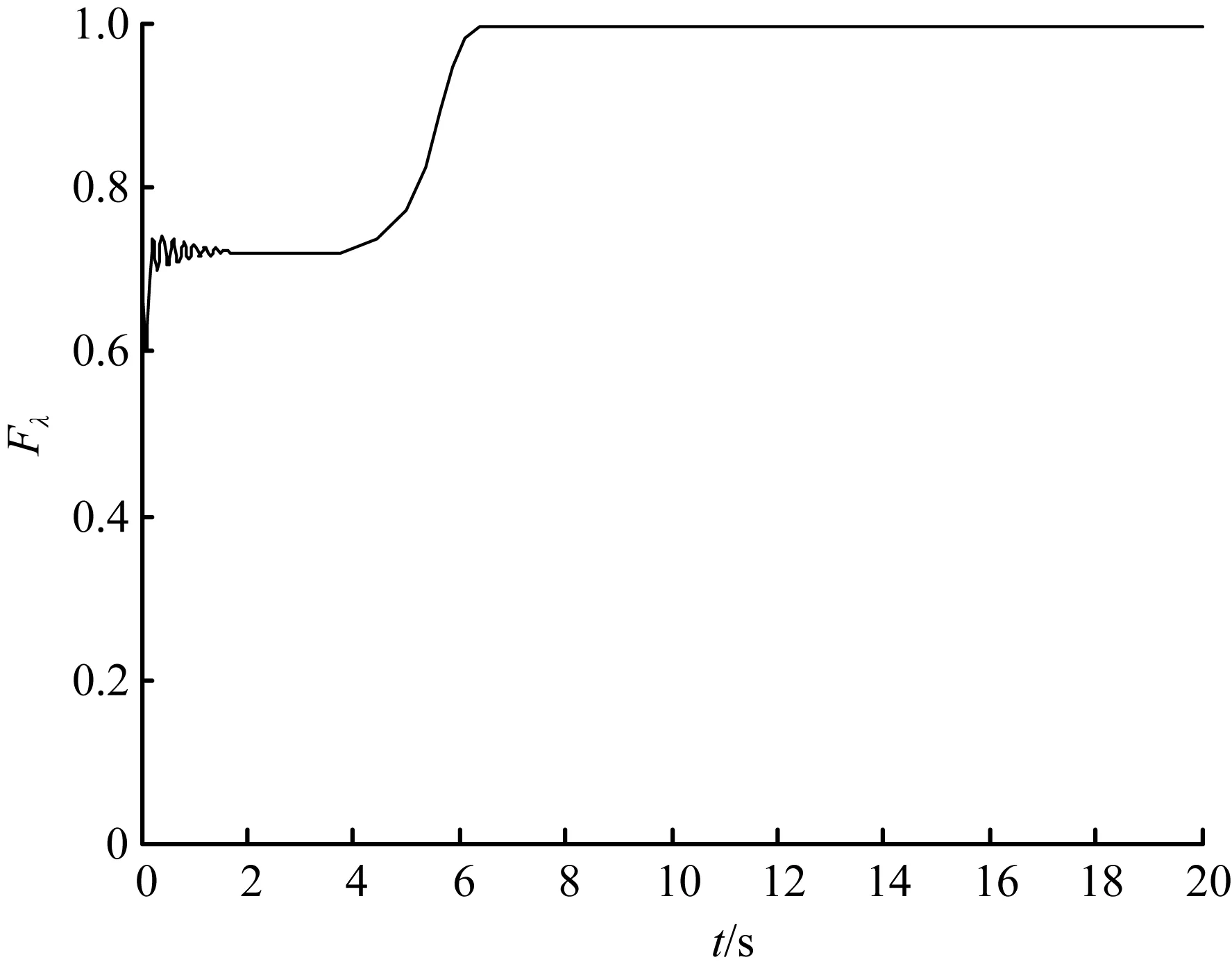
(b) 踏板调整系数曲线
图4 踏板调整系数及滑移率仿真曲线
Fig.4 Simulation of the pedal adjustment coefficient and the slip ratio
2.3 车轮打滑时转矩分配
当前轴车轮发生100%滑移时,需求扭矩计算如下:
Treq=ApTrmax=Treqr,
(18)
Treqf=0。
(19)
当后轴车轮发生100%滑移时,需求扭矩计算如下:
Treq=ApTfmax=Treqf,
(20)
Treqr=0。
(21)
当前后轴车轮都未发生100%滑移的情况时,引入踏板调整系数和转矩分配系数的需求扭矩计算如下:
Treq=FλAp(Tfmax+Trmax),
(22)
(23)
(24)
为了防止驱动轮产生滑移和滑拖,根据前后轴车轮的滑移率,对前轴驱动电机的需求转矩Treqf和后轴驱动电机的需求转矩Treqr进行调整,如果前后驱动轴处的路面附着系数不相等,比如某一侧驱动轴的附着力下降,则转矩分配策略根据踏板调整系数减少总的需求转矩大小,从而减少滑移率较大一侧车轮的动力,减少能量损耗;当某一侧车轮滑移率达到100%时,系统会中断其驱动力的输出,由附着力大的车轮对应的驱动轴输出驱动力,即前后轴电机输出的驱动转矩不再与所对应的汽车前后轴轴荷成比例,而是利用路面的附着条件使附着力大的车轮获得尽可能大的驱动力,使汽车可以安全脱困[14-15]。
3 双电机驱动汽车整车及策略模型
利用美国NI公司的Motohawk,建立MPC565系列控制器底层及策略仿真模型,如图5所示,根据加速踏板及制动踏板的开度、电机的转速、车速、档位、故障诊断的状态等信息,输出对应的前后轴电机的需求扭矩。控制系统针对MCU(电机控制器)和BMS(电池管理系统)的控制算法、系统上下电、驱动模式选择、能量回收计算[16]、扭矩计算等功能实现对整车的控制。

图5 电动汽车策略模型Fig.5 Strategy model of the electric vehicle
限滑机制主要分为前轮限滑和后轮限滑两种类型,根据车速、档位、刹车、车轮滑移率等判断限滑使能条件,通过与电机控制器配合完成限滑功能[17-19]。限滑扭矩的大小主要结合电机的扭矩特性曲线,以初始滑动时车轮的扭矩为基准,当前轴或后轴车轮滑动时,VCU(整车控制器)减小滑动一侧车轮的扭矩,减少动力损失。
如图6所示建立电动汽车的整车模型。集成的NIVeriStandSignalProbe模块获取整车控制器策略模型的驱动踏板信号、制动踏板信号、档位信号等信息,信号经电机控制器模块及PXI(面向仪器系统的外围组件互连扩展)机箱处理后,将电机的转速和转矩,以及车速、滑移率等信号发送给整车控制器,使策略模型在D2P设备上进行硬件在环仿真测试,从而形成一个闭环的仿真控制系统。

图6 电动汽车整车模型Fig.6 Vehicle model of the electric vehicle
4 仿真验证

图7 硬件在环仿真Fig.7 Hardware in loop simulation
利用VeriStand软件搭建整车模型的上位机,将双电机驱动电动汽车整车模型生成的Vehicle.dll文件导入到VeriStand软件内,可以在上位机界面实时控制加速踏板、制动踏板、档位等,并可以观测汽车的车速、转矩、电池SOC(电池荷电状态)等信息。
通过Kvaser将VCU 控制策略模型生成的VCU.dll文件下载进入整车控制器内,如图7所示,使用D2P设备对VCU 控制策略进行硬件在环仿真。
油门踏板开度在50%时,在高附着率的路面上,前后轴车轮滑移率及转矩分配仿真结果如图8所示。由图8可知,当前轴滑移率与后轴滑移率差值很小且前后轴滑移率小于10%时,前后轴转矩会按照轴荷比分配。

(a) 前轴滑移率

(b) 后轴滑移率

(c) 前轴分配的转矩

(d) 后轴分配的转矩
图8 高附着率路面上转矩分配及滑移率仿真图
Fig.8 Simulation of torque distribution and the slip ratio on high adhesion road
从图8可以看出,在附着力高的路面上行驶时,在每一个驱动轮上的路面附着系数足够大,可以提供足够大的路面反向力矩,在加速踏板的全域范围内,车轮的滑移率都保持在一个稳定的区间内[20-22],并且也没有超过滑移率的峰值,前后轴转矩按照轴荷比分配,前后轴转矩分别维持在90 N·m和120 N·m。
油门踏板开度在50%时,在低附着率面上行驶时,前后轴车轮滑移率及转矩分配仿真结果如图9所示。由图9可知,当前轴滑移率与后轴滑移率差距很大时,由于踏板调整系数的介入,前后轴转矩都会相应较小以减少动力损耗。
(a) 前轴滑移率

(b) 后轴滑移率
(c)前轴分配转矩

(d) 后轴分配转矩
图9 低附着率路面上转矩分配及滑移率仿真图
Fig.9 Simulation of torque distribution and slip ratio of front and rear axle on multiple adhesion road
从图9可以看出,当汽车行驶在低附着率道路上时,车轮在刚开始发生滑移时,路面附着系数不能达到汽车的转矩需求,前后轴转矩分别为65 N·m和85 N·m,驱动轮的滑移率将处在不稳定区间。在这种情况下,要通过减少踏板调整系数,使车轮滑移率降低到稳定区域,尽可能的满足当前路面的需求转矩;而当前后车轮滑移率稳定在正常区间10%以内时,前后轴转矩分别回到90 N·m和120 N·m。
综上分析可知,与传统的仅按照前后轴荷比进行前后轴转矩分配的方法相比,本文的基于滑移率的前后轴转矩分配方法可以减少滑移动力的损失,将前后轴车轮滑移率控制在10%以内[5],使汽车经济性和动力性都得到提高。
5 结 论
本文利用前后车轮滑移率,提出了一种基于车轮滑移率模糊PID控制算法的双电机双轴驱动电动汽车转矩分配策略,根据前后轴车轮的滑移率动态优化前后轴电机的输出转矩,应用模糊PID控制算法引入踏板调整系数,使汽车前后轴车轮滑移率控制在10%以内,有效防止驱动轮的打滑;建立了汽车整车模型和控制器策略模型,并应用美国NI公司的D2P进行了硬件在环仿真测试。结果表明,该策略可以实现转矩的智能分配,减少车轮打滑时的动力损失,使前后轴电机工作在高效的转矩区间,从而显著提高了电动汽车的效率,为双电机驱动电动汽车转矩分配控制系统的设计提供了一种行之有效的方法。
[1] YUAN Z, HOU S, LI D, et al.Optimal energy control strategy design for a hybrid electric vehicle[J]. Discrete Dynamics in Nature & Society, 2013, 164:292-297.
[2] BONNANS J F, GUILBAUD T, KETFI-CHERIF A, et al.Parametric optimization of hybrid car engines[J]. Optimization & Engineering, 2004, 5(4):395-415.
[3] ZHANG C N, WU X H, WANG Z F, et al.Mode switching control strategy of dual motors coupled driving on electric vehicles[J]. Journal of Beijing Institute of Technology, 2011, 20(3):394-398.
[4] 张利鹏,李亮,祁炳楠,等.双电机分布式驱动汽车高速稳定性机电耦合控制[J]. 机械工程学报, 2015,51(16):29-40.
[5] LIU W, HE H, PENG J.Driving control research for longitudinal dynamics of electric vehicles with independently driven front and rear wheels[J]. Mathematical Problems in Engineering, 2013, 2013:1-17.
[6] ZOELCH U, SCROEDER D.Dynamic optimization method for design and rating of the components of a hybrid vehicle[J]. International Journal of Vehicle Design, 1998, 19(1):1-13.
[7] HAN G W, ZHANG C N, ZHANG S, et al.Control strategy of the dual motors coupling propulsion for battery electric buses[J]. Applied Mechanics & Materials, 2014, 528:364-370.
[8] 喻厚宇,黄妙华,邓楚南.双电机双轴驱动纯电动车控制策略的研究[J]. 北京汽车, 2007(4):12-15.
[9] 王博,罗禹贡,范晶晶,等.基于控制分配的四轮独立电驱动车辆驱动力分配算法[J]. 汽车工程, 2010, 32(2):128-132.
[10]于广鹏,谭德荣,田厚杰,等.基于模糊推理的驾驶员反应时间修正研究[J]. 广西大学学报(自然科学版), 2014, 39 (6):1234-1239.
[11]余卓平,张立军,熊璐.四驱电动车经济性改善的最优转矩分配控制[J]. 同济大学学报(自然科学版), 2005,33(10):1355-1361.
[12]卢东斌,欧阳明高,谷靖,等.四轮驱动电动汽车永磁无刷轮毂电机转矩分配[J]. 清华大学学报(自然科学版), 2012, 52 (4):451-456.
[13]王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J]. 机械科学与技术, 2011, 30(1):166-172.
[14]黄启然,郑玲,李以农,等.四轮独立驱动电动汽车轮毂电机控制策略的研究[J]. 汽车工程, 2014, 36(10):1237-1242.
[15]王锋,冒晓建,卓斌.ISG并联混合动力轿车最优转矩分配策略[J]. 重庆大学学报(自然科学版), 2008, 31(5):499-504.
[16]初敏,高松,杨坤,等.纯电动客车最佳制动能量回收控制策略研究[J]. 广西大学学报(自然科学版), 2015, 40(2):357-366.
[17]SHABBIR W, EVANGELOU S A.Real-time control strategy to maximize hybrid electric vehicle powertrain efficiency[J]. Applied Energy, 2014, 135:512-522.
[18]张运昌.纯电动轿车双电机耦合驱动系统构型与控制策略研究[D]. 长春:吉林大学, 2015.
[19]毕聪.新型纯电动汽车双电机动力系统研究[D]. 南京:南京航空航天大学, 2014.
[20]李阅薄,羊彦,陈彦来.双电机独立驱动底盘控制算法设计[J]. 计算机测量与控制, 2009, 17(3):481-483.
[21]谷靖.四轮驱动微型电动车整车控制[D]. 北京:清华大学, 2012.
[22]秦大同,周孟喜,胡明辉,等.电动汽车的加速转矩补偿控制策略[J]. 公路交通科技, 2012, 29(5):146-151.
(责任编辑 梁 健)
Torque distribution system of double motor electric vehicle based on slip ratio
GUO Shuai1, LI Jun-wei1, GAO Song1,LI Yan-qiang2
(1. School of Traffic & Vehicle Engineering, Shandong University of Technology, Zibo 255049, China;2. Automation Research Institute of Shandong Academy of Sciences, Ji’nan 250014, China)
The two-axis double motor drive electric vehicle torque distribution strategy was studied, and the dynamic optimization method was developed based on the slipping rate while using vague PID (proportion, integral, differential) control algorithm to calculate the pedal adjustment coefficient, then the model of the vehicle model and strategy was built by Motohawk developed by NI (National Instruments). And the vehicle model was imported into VeriStand to build the upper monitor control system of the vehicle model, then the model application should be downloaded to the vehicle controller by the Kvaser. At last, the hardware in the loop simulation should be applied to D2P (rapid prototype) devices with all kinds of test board. Results show that the design of the torque distribution strategy can distribute the torque reasonably and make the wheels slip ratio within 10% to improve the efficiency and performance of electric vehicles effectively. This strategy will provide a useful reference for the torque distribution of electric vehicle with double motors.
dual motor electric vehicle; torque distribution; vehicle control unit(VCU); hardware in the loop simulation
2016-08-25;
2016-09-21
山东省自然科学基金项目(ZR2015EM054);山东省重点研发计划项目(2015GGX105009)
李军伟(1964-),男,河南平顶山人,山东理工大学教授,博士;E-mail:ljwhitt@163.com。
郭帅,李军伟,高松,等.基于滑移率的双电机电动汽车转矩分配系统[J].广西大学学报(自然科学版),2016,41(6):1797-1806.
10.13624/j.cnki.issn.1001-7445.2016.1797
U461
A
1001-7445(2016)06-1797-10
