基于最小方差理论的风电叶片自动配胶机控制系统设计
2017-01-04刘卫生黄雪梅张磊安
刘卫生,黄雪梅,张磊安,胡 俊
(1.中复连众复合材料集团有限公司,连云港 222002;2.山东理工大学 机械工程学院,淄博 255049)
基于最小方差理论的风电叶片自动配胶机控制系统设计
刘卫生1,黄雪梅2,张磊安2,胡 俊2
(1.中复连众复合材料集团有限公司,连云港 222002;2.山东理工大学 机械工程学院,淄博 255049)
为了解决风电叶片制造过程中,人工配胶出现的生产效率低、原料配比精度差等问题,以风电叶片配胶过程为研究对象,设计了一种基于最小方差控制的自动配胶机。首先,结合风电叶片配胶工艺的特点,设计了一种自动配胶机构。然后,采用了上位机—控制器—执行结构的控制系统构架模式并采用了一种基于最小方差理论的配胶策略。最后,完成了风电叶片自动配胶机的搭建并进行了配胶实验。实验结果表明,自行设计的自动配胶机不仅极大提高了生产效率,而且提高了配胶质量。
风电叶片;自动配胶机;最小方差理论;PLC
0 引言
随着煤、石油、天然气等传统化石燃料的日益耗尽,风能作为一种新型绿色能源具有良好的发展前景。随着联网型风力发电机的出现,风力发电进入高速发展时期。国际能源署《风能技术路线图》指出,到21世纪中叶风力发电占全球电力供应的比例将从目前的2%上升到12%。为了满足日益大型化的风力发电机在使用性能方面的要求,风电叶片均采用复合材料为主体制造。风电叶片已成为复合材料的重要应用领域之一。具有轻质高强,刚度好,疲劳性能好等突出优点的复合材料是生产风电叶片的主要原材料之一。但是,目前国内风电叶片的生产仍以人工配胶为主,效率低,精确度差,原材料浪费严重,产品合格率低等缺点严重影响风电叶片的生产质量和生产效率。
为了解决上述问题,设计一种具有良好控制精度的风电叶片自动配胶设备具有重要的实际意义。Astrom和Wittenmark提出了最小方差自校正调节器[1],这种调节器实现简易,采用单片机便可实现。但该调节器不能用于逆不稳定系统,功能单一。Clark和Gawthrop提出了广义最小方差自校正控制器[2],克服了自校正调节器的主要缺点。但该算法在处理逆不稳定系统时,目标函数确定较为复杂。韩颖等采用最小方差自校正与积分校正相结合的方法对液压阀控马达速度伺服系统进行了研究[3],提高了电液伺服系统的阻尼比,降低了系统的超调量。而且在系统研究过程中,简化了控制系统设计过程中复杂的参数整定问题,仅需调整积分系数,在保持较好控制结果的前提下,大大减少了系统控制设计的工作量。以上研究成果为风电叶片自动配胶设备的研制提供了良好的借鉴作用。
在上述基础上,本文以风电叶片配胶过程为研究对象,设计了一种风电叶片专用的自动配胶机。为了解决配胶过程中存在的配胶效率低问题,控制系统采用了上位机—控制器—执行机构的网络构架模式。上位机采用昆仑通态触摸屏,下位机采用西门子200系列PLC。为了解决混料比例误差问题,采用了最小方差控制的配胶策略。经现场配胶实验表明,配胶比例精准,极大地提高了风电叶片配胶工艺的自动化程度。
1 整体方案设计
结合风电叶片配胶过程的特点,提出了一种风电叶片专用的自动配胶机设计方案,自动配胶机的结构示意图如图1所示。风电叶片自动配胶机主要由配料机构、搅拌机构和控制系统三部分组成。其中配料机构主要由伺服阀、气缸、配料桶以及其他气动辅助系统组成,搅拌机构主要由气动导轨、步进电机和搅拌叶片组成。
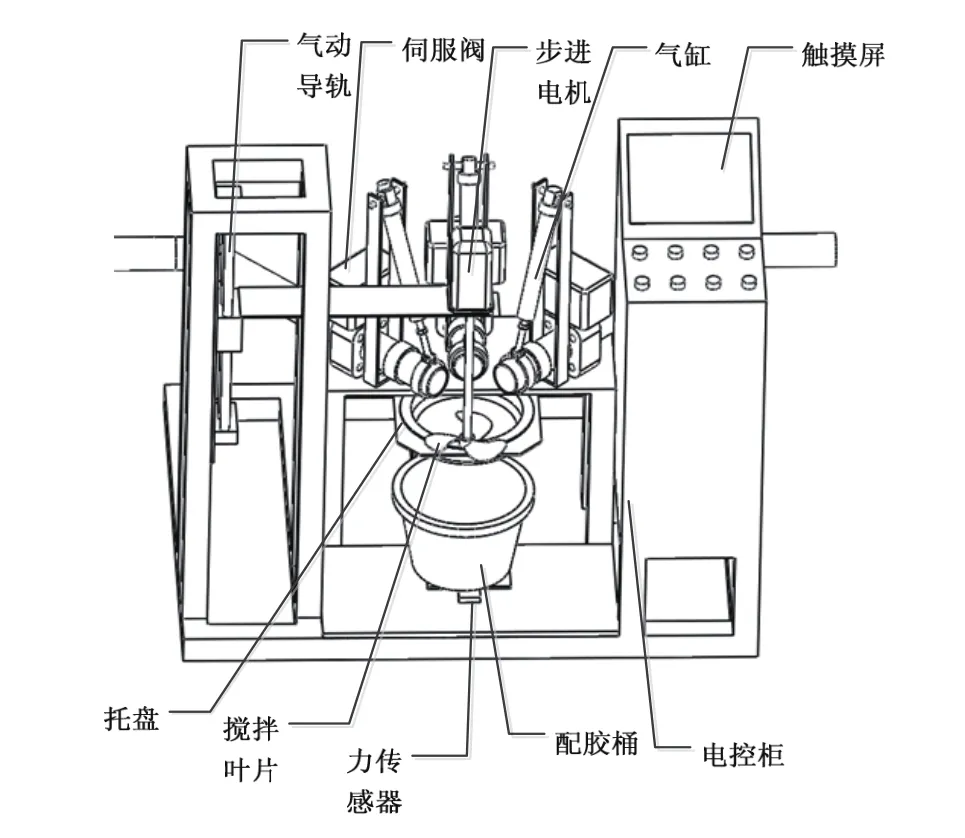
图1 自动配胶机结构示意图
风电叶片自动配胶机控制原理图如图2所示。控制系统主要由触摸屏、PLC、力传感器和相应的执行机构组成。执行机构主要包括气动电磁阀,步进电机和伺服阀。气动电磁阀通过气动导轨控制混料机构和托盘动作;步进电机连接搅拌叶片进行混料;伺服阀控制原料出料。自动配胶机在自动状态下的工作过程为:首先通过触摸屏上的监控界面输入配方混合比和总质量。然后,按下启动按钮控制原料出料的伺服阀开始工作,将原料输送到配胶桶中,当配胶桶中原料重量达到设定值时伺服阀自动停止,同时搅拌器自动落下混料。混料结束后,搅拌器复位,同时接收废料的托盘自动伸出到搅拌器的正下方,接收出料口跟搅拌器上的残留液滴从而完成一次配胶过程。

图2 自动配胶机控制原理图
2 控制系统设计
2.1 最小方差控制设计
为了解决手工配胶过程中出现的配胶误差大,原料配比精度低的问题。采用了基于最小方差理论的偏差控制策略,以提高树脂与固化剂的配比精度。基于最小方差理论的被控自回归滑动平均模型如式(1)所示[4,5]。
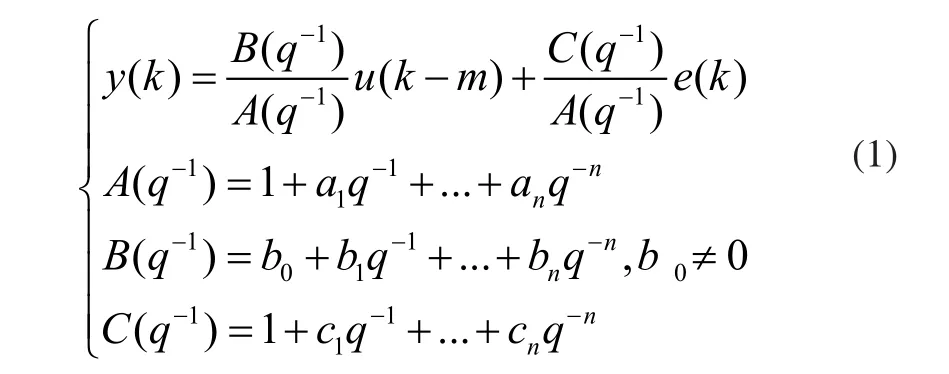
式中,y(k)为k时刻的系统输出;u(k-m)为k-m时刻的系统输入;m为配胶机控制系统采样周期;e(k)为系统输出与系统输入的偏差值;q-1为时移算子。由式(1)可知k+m时刻的系统输出如式(2)所示。

为了找出m步预报最优解y(k+m/k),令预报误差方差最小,即:

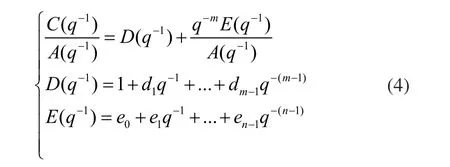
式中,D(q-1)为C(q-1)/A(q-1)的商式;q-mE(q-1)为C(q-1)/A(q-1)的余式。最优预报规律为:


基于最小方差理论的控制系统结构框图如图3所示。在本控制系统中结合图2可知,yr为k时刻伺服阀流量的期望值,u(k)为该时刻的控制器输出,y(k)为该时刻伺服阀输出的实际流量,参数估计和参数调整为最小方差控制的实现部分,通过对k时刻伺服阀流量的实际值、期望值进行比较,根据最小方差控制律对控制器参数进行调整。从而改变控制器输出,实现下一时刻伺服阀流量的精确控制。
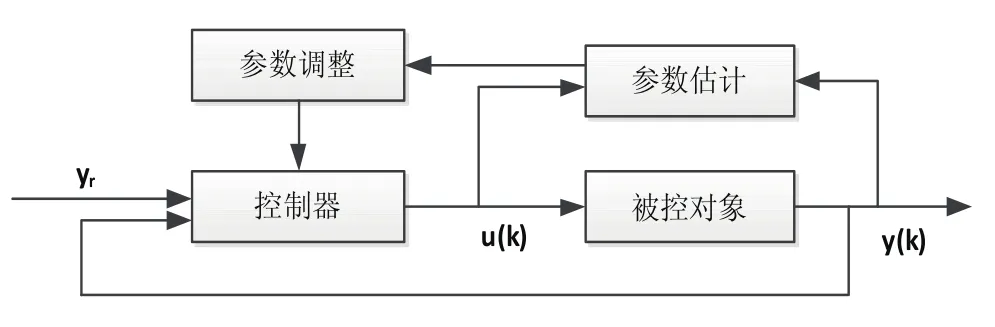
图3 最小方差控制框图
2.2 步进电机控制
为了实现配胶过程中对搅拌机构进行控制,选用西门子200系列的PLC。该PLC通过晶体管输出高速脉冲控制搅拌机构中的步进电机。PLC生成高速脉冲的方式有PTO和PWM两种[6,7]。PTO方式能够产生高速脉冲串,按照给定的脉冲个数和周期,输出占空比为50%的方波。这种控制方式需指定脉冲数和周期,系统通过输出脉冲的速度来控制伺服步进电机的速度,通过输出脉冲个数实现精确定位。PWM方式能够产生一个占空比变化并且周期固定的脉宽调制信号波形。在设定其周期和脉冲宽度的条件下,系统通过调节占空比实现速度控制。风电叶片自动配机选用PTO方式控制步进电机。
采用PTO方式控制步进电机首先应对特殊存储器数据进行设置。该特殊存储器应包含以下数据:控制字节、脉冲计数值、周期和脉冲宽度值。这些值全部存储在特殊寄存器的指定位置中。然后采用脉冲输出指令PLS执行脉冲输出。该指令从特殊存储器中读取数据,使程序按照其存储值控制PTO发生器。自动配胶机通过带有脉冲包络的PTO控制步进电机。该步进电机要求产生的输出信号波形应包括步进电机加速、匀速和减速三部分。其频率-时间图如图4所示。包络表存放在从VB500开始的V存储器区如表1所示,该表给出了产生所要求信号波形的值。
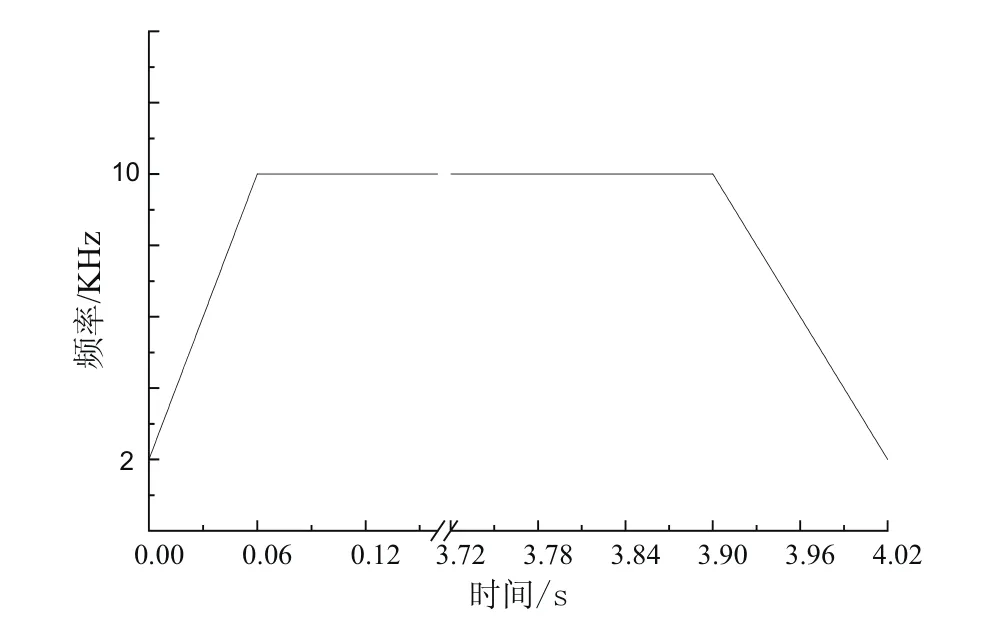
图4 频率-时间图
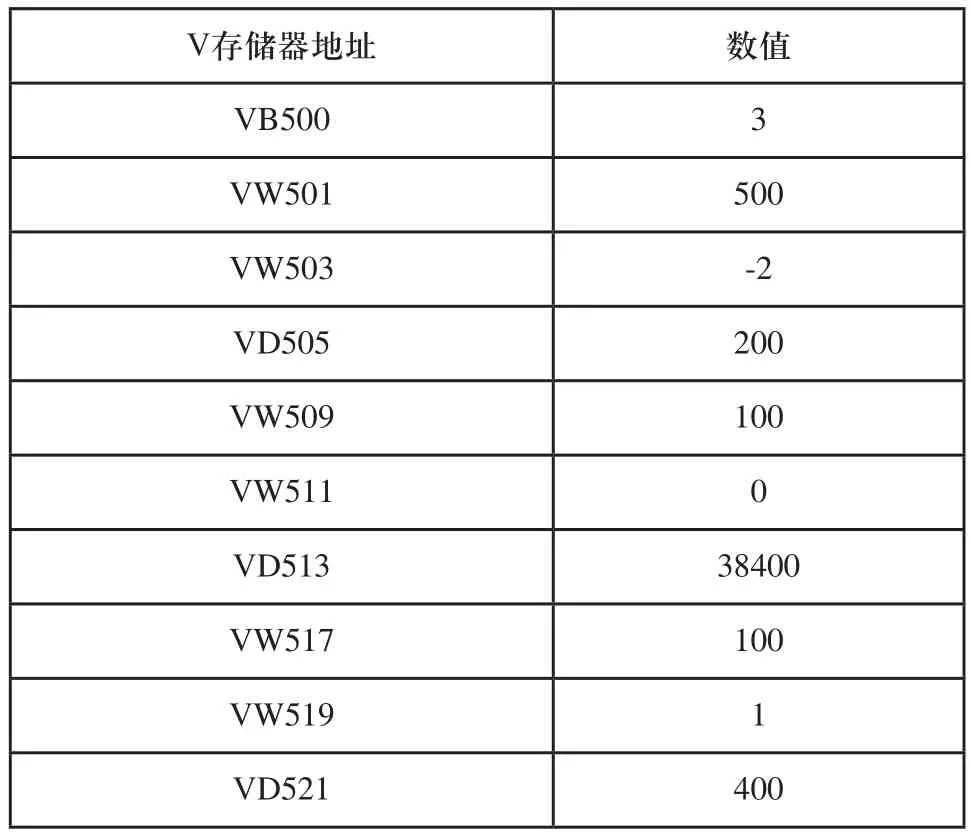
表1 步进电机包络表
2.3 监控界面
风电叶片自动配胶机通过MCGS组态软件完成监控界面的编程如图5所示,界面在PC机上设计好后通过编程电缆下载到触摸屏上。自动配胶机上位机界面由监控主界面、手动自动切换界面、参数设置界面、报警界面和数据记录界面组成。
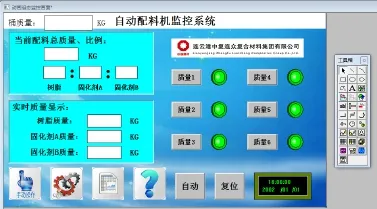
图5 监控主界面
监控主界面主要由当前配料总质量、比例,实时质量显示,六种配胶质量的选择与监控,设备复位按钮,界面切换等部分组成。可供后台切换的界面为手动操作界面、参数设置界面、报警界面和数据记录界面。其中手动操作界面主要用于三种原料的手动加料控制,电机手动控制,支架上下移动控制,托盘前后移动控制。参数设置界面主要用于设置六种不同的配胶质量设定值以及每种质量下的混合原料比例值。报警界面主要用于实现配胶机报警显示及报警复位。数据记录界面主要用于配胶数据的查询、编辑和存储工作。
3 配胶实验
在完成设计方案的基础上,搭建了风电叶片自动配胶机实验平台,并进行了现场配胶实验。部分实验参数和实验现场图分别如表2和图6所示。

表2 实验参数

图6 实验现场
配胶实验中分别对不同配胶质量,不同配胶原料的几种常用混合比进行了多次测试,测试结果如表3所示,其中原料采用生产复合材料风电叶片所需要的固化剂、树脂A和树脂B作为实验的原材料。
配胶实验过程中受到配胶原料的限制,只对30kg混合质量进行了测试,由实验结果可知,在30kg范围内质量误差值可以控制在±0.02kg以内,完全满足高性能配胶机的控制要求。
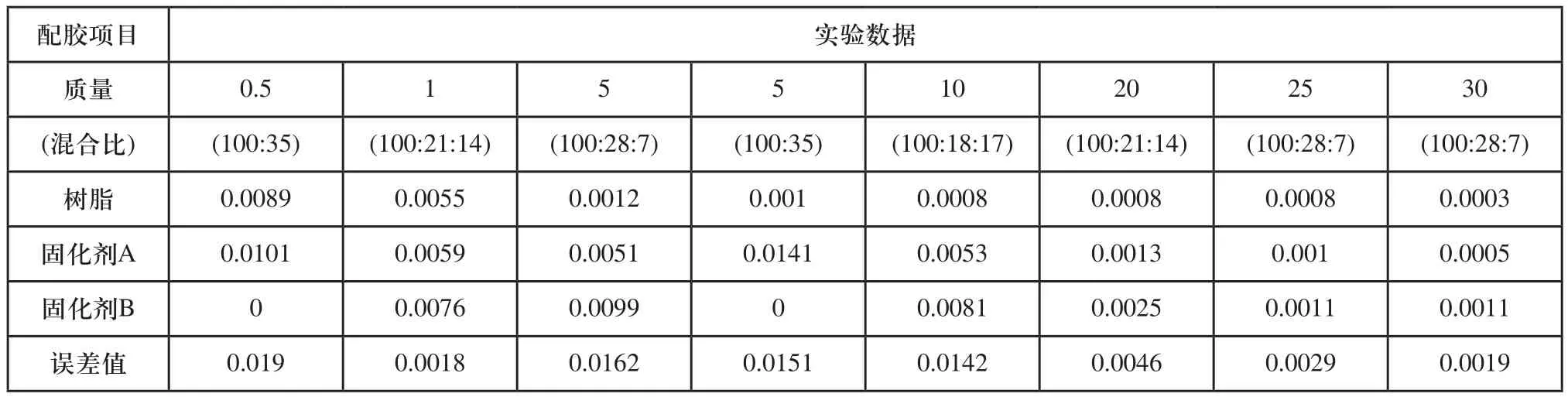
表3 配胶实验数据
4 结论
针对复合材料生产过程中配胶工艺存在的问题,本文设计了一种基于最小方差理论的风电叶片自动配胶机控制系统,完成了自动配胶机设备的搭建。在上述基础上,进行了现场配胶试验。得出以下结论:
1)为了解决人工配胶过程中生产效率低等问题,设计了一种自动配胶机构。采用了上位机—控制器—执行结构控制方案,通过PLC控制阀门流量进行配胶,实现了配胶过程自动化,大大提高了生产效率。
2)为了解决配胶过程中出现的树脂和固化剂配比精度低等问题,采用了一种基于最小方差控制的配胶算法。通过现场配胶试验表明,配胶质量能够控制在±0.02kg以内,极大地提高了原料配比精度。为风电叶片自动配胶机的设计与控制提供借鉴。
[1] 刘霞,王德民,王秀红.自适应控制发展概述[J].油气田地面工程, 2004,23(1):31-31.
[2] Niederlinski A.Convergence rate for RLS-based direct selftuning minimum-variance regulation of ARMAX minimum phase plants[J].Automatic Control IEEE Transactions on,1997, 42(7):1023-1028.
[3] 韩颖,李长春,张金英.阀控马达的速度控制研究[J].控制工程, 2003,10(S1):8-10.
[4] Jun J E, Wilson L E, Vinuesa C G,et al. Identifying the MAGUK Protein Carma-1 as a Central Regulator of Humoral Immune Responses and Atopy by Genome-Wide Mouse Mutagenesis[J]. Immunity, 2003, 18(6):751-62.
[5] 王庆丰,唐建中,闭治跃.疏浚系统泥浆浓度的自校正前馈控制[J].控制理论与应用,2008,25(03):578-582.
[6] 刘云龙.S7-200PLC的PTO在步进电机位置控制中的应用[J].科技创新与应用,2015(33):118-119.
[7] 罗庚兴,宁玉珊.基于PLC的步进电动机控制[J].机电工程技术, 2007,36(10):66-67.
Design of control system of automatic adhesives mixing machine for wind turbine blade based on minimum variance theory
LIU Wei-sheng1, HUANG Xue-mei2, ZHANG Lei-an2, HU Jun2
TP273
A
1009-0134(2016)12-0011-04
2016-08-27
国家自然科学基金(51405275,51305243);山东省自然科学基金(ZR2014EL027)
刘卫生(1974 -),男,高级工程师,研究方向为复合材料新产品研发、材料性能、生产工艺及质量控制。
