全向智能移动设备在列车车体转运中的应用
2017-01-04庞龙亮王海峰许世杰张军奎
庞龙亮,杨 辉,王海峰,许世杰,张军奎
(北京卫星制造厂 北京星达科技发展有限公司,北京 100190)
控制技术
全向智能移动设备在列车车体转运中的应用
庞龙亮,杨 辉,王海峰,许世杰,张军奎
(北京卫星制造厂 北京星达科技发展有限公司,北京 100190)
针对高速动车组车体体积大、重量大带来的转运不方便等问题,提出了一种基于麦克纳姆轮的列车转运设备。介绍了设备的工作原理及实现方式。在此基础上自主设计开发了一套多功能列车转运平台,多功能列车转运平台具备灵活的运动方式、良好的通过性、较高的定位精度,极大的提高了高速动车组的转运效率。
全向轮组;列车车体转运;智能控制
0 引言
列车车体尺寸大,重量大,列车装配厂房往往存在空间有限,作业通道狭小,列车装配过程中车体的转运成为影响列车生产效率的重要因素。通常列车车体转运往往采用常规的轮式转运设备,轮式转运设备可实现直行、转向等功能,转弯半径大,运转灵活性不高,转运效率低下,严重影响了列车装配厂房利用率及列车生产效率。
针对上述问题,本文提出了一种基于麦克纳姆轮的列车车体转运设备。通过麦克纳姆轮特殊的全向移动形式,结合双平台联动控制技术,实现列车车体的二维平面内全向移动及有效行程内任意高度的升降及定位。该设备载重大、定位精度高,运动形式灵活,可大幅提高列车车体的转运效率,有效提升厂房利用率及生产效率。
1 设备原理
列车车体长,重量大,例如一节高速列车车体长度约25m,装配过程后期重量可达40t,为了充分节省空间,提高设备利用率,本列车车体转运设备采用两台设备联动控制的形式,通过麦克纳姆轮实现设备的全向移动功能[1],通过联通式液压悬挂实现地面的适应性及升降功能。
1.1 全向移动功能实现原理
本设备通过麦克纳姆轮实现全向移动功能,麦克纳姆轮结构如图1所示,主要由轮毂和具有特殊轮廓曲线的棍子组成,其中棍子均匀的分布在轮毂上,可以自由旋转,棍子轴线与轮毂轴线成45度夹角,所有棍子组成的外包络线形成一个圆。每个全向轮组具有绕轮组轴心转动、绕棍子轴心转动两个自由度[2,3]。

图1 全向轮结构形式
全向移动功能一般通过四个或者四个以上麦克纳姆轮协同控制轮组实现。如图2所示,通过轮组之间的方向、差速及上述两个自由度的分解或合成,实现设备的全向移动功能。
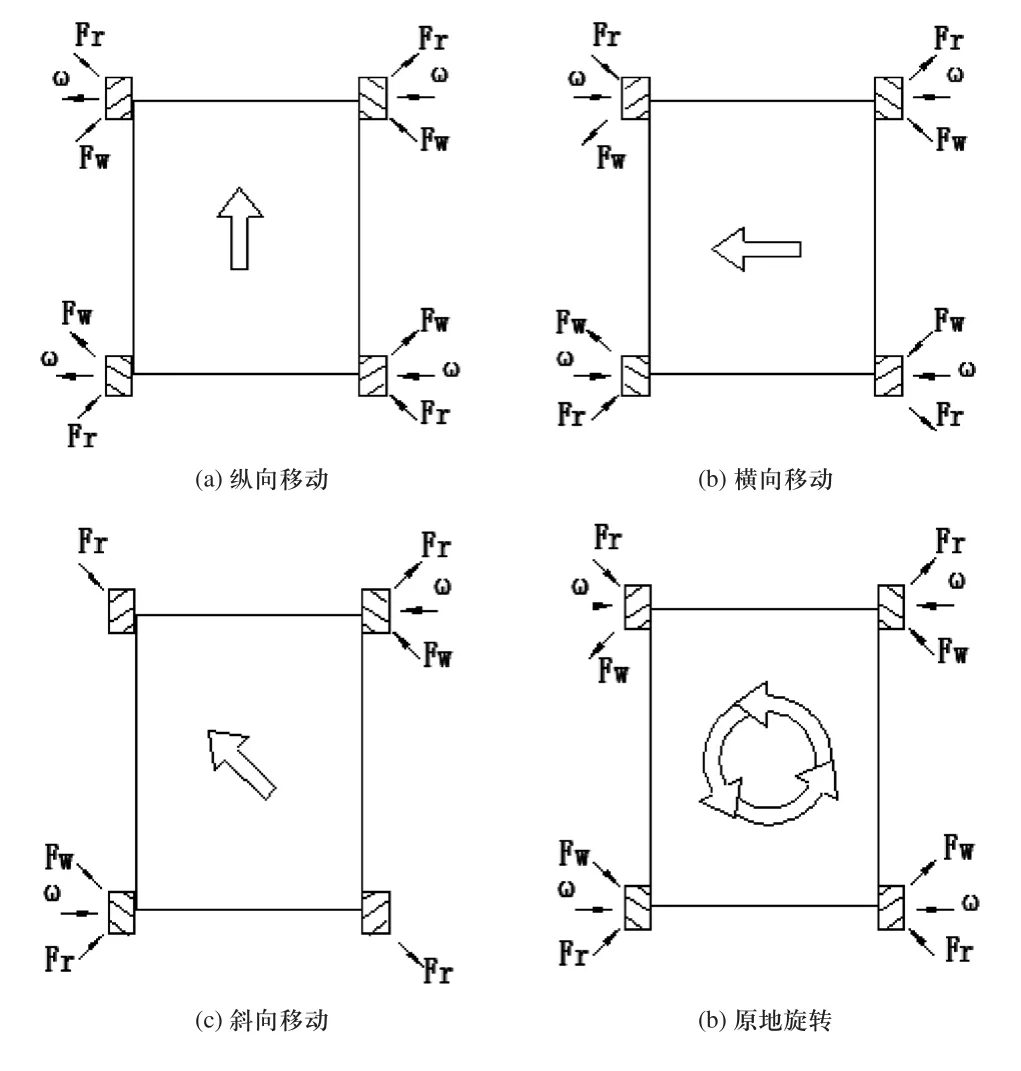
图2 全向移动形式与各轮驱动方向关系图
1.2 液压悬挂实现原理
根据上述麦克纳姆轮实现原理,轮组与地面有效接触是实现全向移动功能的首要条件。另外,设备还需要具备一定的升降功能,实现列车车体转运过程架台的离地后转运及转运后落地功能,因此悬挂系统必须具备轮组着地及升降两个功能。
由于本列车车体转运设备单平台采用12个麦克纳姆轮,采用常规的减振形式难以实现12个轮组同时着地,本文开发了一种联通式液压减振系统,将十二个减振油缸分为四组,每组油缸两两联通,当出现单个轮组与地面没有有效接触时,液压系统会自动均衡各油缸压力,实现轮组着地。
通过动力单元、车姿控制阀、油缸内置位移传感器闭环控制,实现车姿控制,即可实现设备的升降功能。
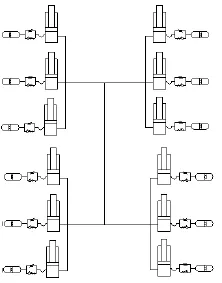
图3 液压悬挂联通原理示意图
2 设备实现
2.1 设备的整体设计
列车车体转运设备采用两台基于麦克纳姆轮的移动平台联动控制,实现列车车体的转运功能。单个移动平台采用12个麦克纳姆轮,控制12个行走电机控制麦克纳姆轮的方向、速度,通过12个麦克纳姆轮驱动力的合成与分解,实现设备二维平面内任意方向的移动功能,包括直行、横行、斜行、任意曲线移动、零回转半径转动等全向移动形式[4]。通过上述液压悬挂系统,确保每个轮组的着地性。
图4为列车车体转运设备系统原理图,操作者通过

图4 设备原理示意图
【】【】手持器将操作信息发送给两个控制器,控制器通过识别手持器信号,判定操作指令,同时结合位移传感器反馈的信号,判定设备当前位置、速度信息,通过运动学方程解算成相应的电机方向、转速指令,并传递给相应的电机驱动器,电机驱动器驱动电机按照指令运转。位移传感器将相应的位置、高度信息传递给控制器,两控制器比较位置、高度信息后自动修正偏差,从而实现整个联动过程的精确控制。同时,控制器将两移动平台位移、速度等相关信息传递给操作者,为发出下一个操作指令做参考[5]。
2.2 设备实现
The application of intelligent omni-directional mobile platform in high speed train body transportation
PANG Long-liang, YANG Hui, WANG Hai-feng, XU Shi-jie, ZHANG Jun-kui
TH238
B
1009-0134(2016)12-0009-03
2016-08-23
中国航天科技集团第五研究院航天技术应用产业产品孵化项目(2012FH06529)
庞龙亮(1983 -),男,工程师,工学硕士,主要从事机械设计研究。
