面向多传感器数据融合的雷达显控终端的设计方法
2017-01-03郭新民
郭新民
(1. 92785部队,河北 秦皇岛 066200;2. 北京理工大学雷达技术研究所,北京 100081)
面向多传感器数据融合的雷达显控终端的设计方法
郭新民1,2
(1. 92785部队,河北 秦皇岛 066200;2. 北京理工大学雷达技术研究所,北京 100081)
提出了一种面向多传感器数据融合的雷达显控终端的设计方法。将雷达回波录取、目标检测与跟踪、视频采集与回放、目标属性识别等信息显示集成在一起,将二次雷达及船舶自动识别系统(AIS)发送的识别结果与一次雷达融合处理,输出目标的属性、航迹、编队及敌我身份等信息,提高雷达的战场信息感知能力。
显控终端;数据融合;视频采集
0 引 言
随着现代电子对抗技术的不断发展,战争对信息的获取、传输及处理都提出了更高的要求,而雷达作为对空海监视防御的千里眼必须满足现代战争的需求[1]。显控终端是雷达的重要组成部分,是操作员与雷达进行信息交互的平台,实现对雷达的操控及参数设置,显示雷达的工作状态及一、二次目标信息。随着数字信号处理技术与大规模集成电路技术的不断发展,显控终端经历了从模拟终端、模数混合终端到数字终端的发展过程[2]。为满足显控终端不断发展的需要,本文提出了一种面向多传感器数据融合的显控终端设计方法。经理论分析及实际应用表明,该显控终端可提供全面的战场态势信息,可靠性高,适应性好,具有广阔的应用前景。
1 功 能
本文设计的雷达显控终端主要用于完成以下功能:
(1) 雷达操控、开机自检、状态监控与报警;
(2) 电子海图以及一、二次目标信息显示;
(3) 目标属性、操控指令、工作状态、故障检测等信息的显示与存储;
(4) 目标信号的检测、关联滤波、外推及补点跟踪等数据处理[3];
(5) 一次雷达与二次雷达及AIS的目标航迹处理、关联及融合;
(6) 目标航迹的存储、视频采集与回放;
(7) 模拟雷达回波信号,完成终端自检、调试以及培训操作员等功能。
2 雷达显控终端的设计
显控终端主要由电子机箱、显示器及外围操控设备等组成,其中电子机箱分为人机交互单元和航迹处理单元两个部分。人机交互单元主要实现操作员对雷达系统的操控、状态监控与报警、显示处理、视频采集与回放等功能。航迹处理单元主要实现目标回波信号的检测、数据关联与跟踪、多传感器数据融合等功能。显控终端工作原理如图1所示,其中各功能模块之间传输的信息主要有数据流、操作流和状态流。
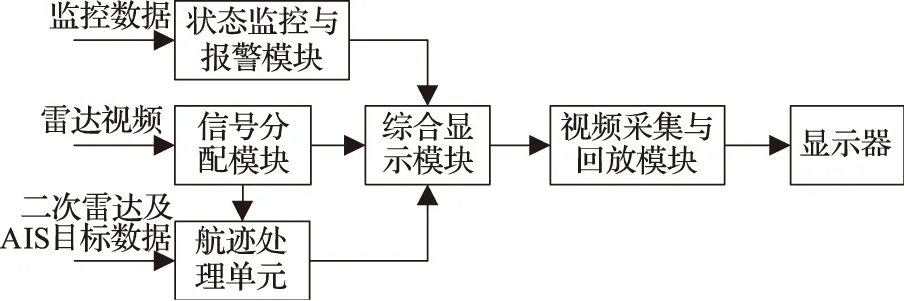
图1 显控终端工作原理框图
2.1 人机接口单元
人机接口单元由CPU、信号分配、综合显示、视频采集回放、双冗余网络、同步串口、异步串口和网络交换等模块组成,其内部数据流程图如图2所示。
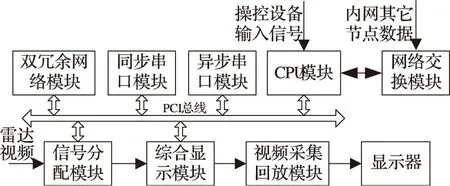
图2 人机接口单元数据流程图
信号分配模块由FPGA芯片及外围元件等组成,主要用于:
(1) 接收终端的各项控制信息;
(2) 接收主机的时码信息,完成时统对时;
(3) 接收信号处理分机发送的空/海视频和零距离脉冲以及伺服分机发送的方位角信息,处理后分配给航迹处理单元、综合显示模块及视频采集回放模块。
如图3所示,综合显示模块是显控终端的显示处理中心,一方面将数字回波信号与数字方位信号进行坐标变换处理,生成P显全景图像及微B显图像;另一方面接收雷达参数设置信息、状态监控与报警信息及其他操控信息,将这些信息分层显示。
图3 综合显示终端图
视频采集回放模块由CPU、采集回放及数据存储等模块组成,可根据操控指令切换实时视频数据或回放视频数据的输出。视频采集回放模块可以实时地记录显示器的视频信息,按照MPEG4格式存储在数据存储模块上,并可实时地从数据存储模块读取视频存储数据,解压并且回放到显示器上,重现雷达训练或试验时的雷达数据,为专家进行事后数据分析提供保障。
2.2 航迹处理单元
航迹处理单元由数据处理、数据融合、数据存储及电源等模块组成,其中数据处理模块由接口交换、检测凝聚、航迹处理等部分组成。检测凝聚模块和航迹处理模块的硬件设计完全一致,采用X86CPU和FPGA联合处理的架构。CPU模块负责复杂的算法实现。FPGA模块实现并行处理算法。这种构架具有处理能力强、任务分配简单、易于调试等优点,处理模块间采用串行RapidIO和以太网的形式互联以实现高速传递数据。
数据处理模块通过对目标航迹的处理以实现对目标的跟踪。目标航迹处理包括航迹的建立、目标航迹和雷达获取的观测数据的相关处理、航迹的滤波、预测及终止[4]。航迹相关算法首先判断本次获取的观测是否在航迹的相关波门之内,然后将相关波门内的观测和航迹进行正确配对。航迹预测是在本次航迹滤波值的基础上根据目标运动模型来估计目标未来的状态。滤波用来估计目标当前的运动参数,把本次相关的观测和预测航迹估计合并处理形成新的目标运动参数[5]。本文采用Kalman滤波算法进行航迹的滤波和预测,能较为准确地得到目标的位置信息。数据处理模块流程图如图4所示。

图4 数据处理模块
数据融合模块主要将二次雷达与AIS发送的目标数据信息与一次雷达的目标信息进行数据预处理、航迹关联及航迹融合等处理,综合显示目标的属性信息。对空目标输出一次雷达与二次雷达的数据融合结果,对海目标输出一次雷达与AIS的数据融合结果。数据融合模型如图5所示。
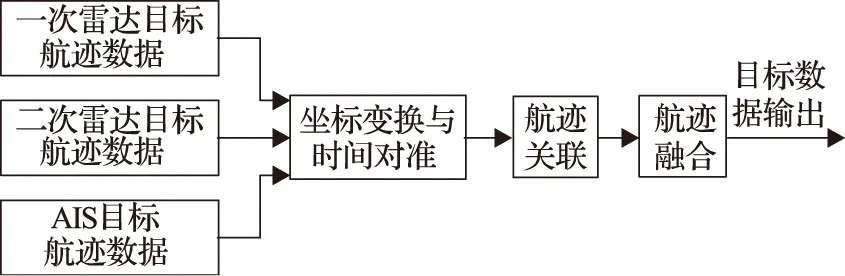
图5 多传感器数据融合模型
由于一次雷达、二次雷达及AIS三者对目标的观测时间和空间基准点不同,因而为便于进行数据信息融合,应先对输出的目标数据进行坐标变换和时间对准等处理。数据融合的关键是航迹关联,即判断来自两个传感器的两条目标航迹是否为同一个目标,即解决空间覆盖区域中的重复跟踪问题,经航迹关联检验确定是同一目标的航迹可进行航迹融合处理,得到目标状态估计。航迹融合的主要方法是基于统计加权估计,将雷达测量的目标位置信息与二次雷达/AIS接收的目标位置信息按精度加权合并,从而提高了航迹精度。
3 结束语
在现代信息化战争中,雷达工作的电磁环境日趋复杂,电磁脉冲密度越来越高,信号形式复杂多样,对雷达的各项功能及指标的要求也越来越高,面向多传感器数据融合的显控终端是未来雷达的发展趋势[6]。本文提出的显控终端设计方法充分利用目标检测与跟踪、多传感器数据融合、视频采集与回放等研究成果。经外场试验测试及实际应用表明,该显控终端可有效地将二次雷达及AIS等装备提供的数据信息与一次雷达的目标信息融合后准确显示目标属性信息,实现军用飞机的目标引导及监视、民航的空中交通管制、重点海域舰船的态势显示等功能,且具有良好的人机界面环境,可为指挥员提供较为直观、全面的战场态势信息,能大幅度提高雷达的战场信息感知能力,代表了未来雷达显控终端的发展方向。
[1] 张乐锋,虞华.信息化雷达显控终端的设计与实现[J].现代雷达,2009(8):33-38.
[2] 丁鹭飞,耿富录,陈建春.雷达原理[M].5版.西安:西安电子科技大学出版社,2013:392-393.
[3] 王凯,孙立国,李世丹,等.信息化雷达远程显控终端的设计与实现[J].信息与电子工程,2011(1):12-16.
[4] Merrill I Skolnik. 雷达手册[M].3版.北京:电子工业出版社, 2010:461-462.
[5] 吴顺君.雷达信号处理与数据处理技术[M].北京:电子工业出版社, 2008:329-330.
[6] 宋锐,张静,夏胜平,等.基于通用微机的数字化雷达显控终端实现[J].系统仿真学报,2003(5):745-748.
Design of radar display and control terminal based on multi-sensor data fusion
GUO Xin-min1,2
(1. Unit 92785 of the PLA, Qinhuangdao 066200, China;2.Radar Technology Research Institute of Beijing Institute of Technology, Beijing 100081)
A radar display and control terminal is designed based on the multi-sensor data fusion. The radar echo extraction, target detection and tracking, video collection and playback, target attribute identification information are displayed and integrated, and the identification results from the secondary radar and the automatic identification system (AIS) are fused with those from the primary radar to output the attributes, tracks, formation and friend-or-foe identities of the targets, which can greatly improve the information awareness ability of the radar on the battlefield.
display and control terminal; data fusion; video collection
2016-09-10;
2016-09-22
郭新民(1984-),男,工程师,在读硕士,研究方向:雷达信号处理。
TN87
A
1009-0401(2016)04-0053-03
