海杂波测量雷达总体设计技术研究
2017-01-03董金良韩长喜
董金良,韩长喜,李 旭
(南京电子技术研究所,南京 210013)
海杂波测量雷达总体设计技术研究
董金良,韩长喜,李 旭
(南京电子技术研究所,南京 210013)
以某海岛固定式海杂波测量雷达项目为背景,针对海杂波测量雷达总体设计技术进行了研究。从需求上分析了海杂波测量雷达总体设计特点,对该雷达的整机工作原理、工作方式和关键技术进行了描述,给出了海杂波测量雷达主要指标的分析与计算结果。
海杂波测量;数据采集;杂波录取;杂噪比
0 引 言
海杂波测量雷达主要用于海杂波数据采集工作,在数据采集的基础上对海杂波进行时域和频域特性分析,根据杂波特性分析结果可以对杂波抑制措施进行优化,使对海雷达在杂波背景下的目标探测能力得到进一步提升。国内外许多文献都是对海杂波的特性进行分析和研究,尚无文献讨论海杂波测量专用雷达的设计方法。本文以某海岛固定式海杂波测量雷达项目为背景,对其总体设计技术进行了研究。
1 需求分析
固定式海杂波测量雷达一般架设在海岛上,需要具有防雷击、抗风和“三防”措施,以适应海岛工作环境。雷达架设在山顶,运输、架设和安装困难,需要进行组合式结构设计。雷达采用远程集中控制,只能采用光纤进行数据传输和指令控制,需要进行统一的接口设计。雷达具有远程遥控开关机,以及过热、过压、过流等故障下的自动保护和状态异常报警等功能,需要具有完善的机内自检设计。雷达具有多种工作方式,且要求定时控制灵活,定时器需要具备根据参数实时产生定时的能力。雷达交付后需配合系统联试并完成系统集成,软件需具备二次开发能力。
2 雷达工作原理
固定式海杂波测量雷达一般由雷达站和指控中心构成。雷达站由天馈伺总成、天线罩及配套设施构成,其中天馈伺总成由天线阵面和天线座总成组成,配套设施包括视频监控、照明消防、环控设备、防雷接地等组合而成。
图1给出了海杂波测量雷达工作的基本原理框图。雷达采用全数字相控阵体制,方位上机扫加相扫,仰角上角度可机械调整。
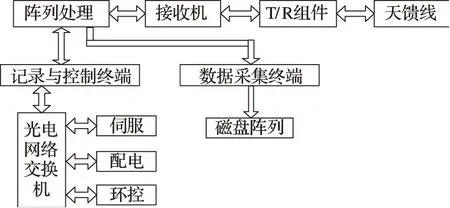
图1 海杂波测量雷达工作原理框图
当雷达处于发射阶段时,接收机产生系统所需的线性调频信号,同时完成所有通道的相位控制功能,以形成指定的波束形状,激励信号送至模拟T/R组件,经发射激励放大和极化开关选择后从组件输出,馈给列馈天线单元并将信号辐射至空中。当雷达处于接收阶段时,目标信号经列馈天线进入模拟T/R组件,经低噪声高放放大、限幅等处理后输出至接收机数字接收模块,经下变频、中频采样和数字正交鉴相输出数字信号,送至阵列处理板打包。打包后的数据一路送至记录与控制终端,进行数据采集和短期存储,并同时完成雷达回波数据和工作状态的实时显示;另一路通过数据采集终端,将数据实时存储至磁盘阵列中。
3 工作方式设计
为实现多种雷达参数和海洋环境条件下海面后向散射回波的测量,以及便于雷达状态检测和维护,雷达设计了多种工作方式。
3.1 常规杂波录取方式
常规杂波录取方式下,雷达能够实现方位/俯仰位置可变条件下的波束固定,以及俯仰位置固定下的方位连续扫描。该工作方式包含全阵工作、半阵工作、4通道合成工作3种子模式。
操作员可根据杂波录取任务规划进行任务加载,对每条任务的工作方式、工作参数、工作时长等参数进行设定。系统将按照任务规划表对每条任务顺序执行并形成相应记录文件。操作员也可在显控中心针对当前海情等条件实时更改雷达参数,进行杂波录取工作。
操作员可对感兴趣的原始数据灵活选择其中一路信号进行脉压前或脉压后实时显示,以监测系统是否工作正常。所有原始数据与数字波束合成(DBF)后的和通道数据将根据不同的工作参数生成相应文件,便于事后数据分析。
3.2 仿机载平台运动杂波录取方式
当处于仿机载平台运动杂波录取方式时,雷达采用逆相位中心偏置天线(IDPCA)[1]技术,通过定时器的分布控制实现载机运动的模拟,即通过发射天线孔径的移动实现天线等效相位中心的移动,从而模拟一定速度的载机运动。该工作状态下,采用脉冲间顺序改变发射的天线阵列(或称通道),直至所有阵列结束,并重复该过程。
雷达待机状态下,操作员通过显控台选择雷达进入仿机载平台运动杂波录取方式,然后将雷达转入工作状态。操作员设定需要模拟的载机速度、发射孔径使用阵列数和移动阵列数等参数。雷达定时器产生相应的定时波形,对所有发射组件进行单独控制,对发射孔径所用阵列实时切换,以实现地面雷达仿机载平台运动。
3.3 自检方式
作为雷达的一个基本组成部分,雷达机内自检与雷达各分系统同步研制。雷达的机内自检具有3种工作方式:加电自检测(PUBIT)、周期自检测(PBIT)和操作员启动自检测(MBIT)。
(1) 加电自检 当雷达开机时进行加电自检,通过处理器诊断检查雷达数据相关处理器工作是否正常,并进行总体检查、存储器读/写检查和输入/输出循环检查。
(2) 周期自检 雷达正常工作后,在不中断雷达工作情况下对雷达的一些重要工作参数进行周期性监测。
(3) 操作员启动自检测 根据操作员的请求,对雷达各最小可更换单元进行自检,并将自检结果在终端上显示。
3.4 监测方式
在雷达处于阵面监测状态下,当监测发射通道时,被测路正常工作,其他路组件关闭,激励信号由定向耦合器耦合经功分器送至监校通道,经后续处理并存储。对多路的接收结果进行幅相比对,完成发射通道的监测。同样在雷达处于阵面监测状态下,当监测接收通道时,监校通道产生激励测试信号经功分器分配至所有T/R组件,各组件输 出经接收机数字接收通道后送至DBF,可直接对多路结果进行幅相比对,完成接收通道的监测。
4 关键技术分析
4.1 可靠性和环境适应性设计技术
雷达架设在海岛上,所处环境具有高温、高湿、高盐雾的特点,同时设备应具备连续24 h工作的能力,因此对雷达设备的环境适应性和可靠性要求很高。可采取以下措施规避风险:
(1) 采取长效环控措施,加装除湿除盐雾及空调设备,改善室内工作环境。环控设施应能实时监测室内环境参数,并能根据环境参数设置自动运行或停止。对于雷达阵地长期闲置的特殊情况,应根据季节气候特点定期运行环控设施,确保室内环境始终处于较好的条件,并定期检查、维护环控设施,定期更换过滤网等。
(2) 高频箱采取内部热传导、箱壁设置冷板、外部通风方式,将内部设备热量转移到外界空气中。采用仿真分析和试验相结合的手段验证热设计的效果。
(3) 采用耐腐蚀性能较好的金属材料、结构设计方法及工艺手段,提高设备自身的环境适应能力。
(4) 对于T/R组件、电源、风机组等关键设备,采取适当冗余设计提高系统可靠性。
(5) 定期对雷达设备、配套设施进行检查维护。
4.2 有源相控阵脉组极化切换技术
为了实现在不同极化方式下海杂波的测量,天线阵面需要在有限的结构尺寸下实现双极化快速切换的功能,分别对应水平和垂直极化方式。
天线阵面双极化的实现有以下几项技术难点:
(1) 双极化天线单元的设计
在有限的结构尺寸下,设计双极化工作的天线单元,需要两种极化之间具有高隔离度,需要双极化单元具备结构上的可包封性能等。
(2) 双极化馈电网络的设计
为了实现双极化的工作,需要两套独立的馈电网络,可以实现天线阵面在能量上的分配。
可采取以下措施:
(1) 天线单元采用十字交叉半波振子。该十字交叉半波振子有两个射频端口,分别对应水平、垂直极化方式。十字交叉振子单独密封,它们的背后安装完整的反射平板。
(2) 每根天线上有N个双极化单元,每根天线对应两个射频输入口,内部形成两个1/N功分网络背靠背装配。每个功分网络对应一种极化形式的天线单元,与十字交叉振子之间过渡连接。
5 主要指标的分析和计算
5.1 海杂波反射截面积计算[2]
海杂波可定义为雷达照射波与海面交互作用后的散射回波。海杂波回波的幅度通常用散射系数来表示(计为σ°),即单位面积的散射截面积。海杂波散射系数与照射面积的乘积为目标散射截面积(Radar Cross-Section,RCS),RCS=σ°A即(其中A为照射面积)。对于工作于脉冲体制下的雷达来讲,在小擦地角下,有
其中,R为雷达距海面的斜距,c为光速,τ′为有效脉冲宽度,θ为擦地角,ø为天线方位波束宽度。
图2和图3分别给出了L波段雷达水平极化和垂直极化条件下不同海情的海杂波平均后向散射系数。图4和图5分别给出了水平极化和垂直极化条件下全阵面工作时不同海情下的目标散射截面积。
由图中可以看出,水平极化条件下的后向散射系数和目标散射截面积明显小于垂直极化。
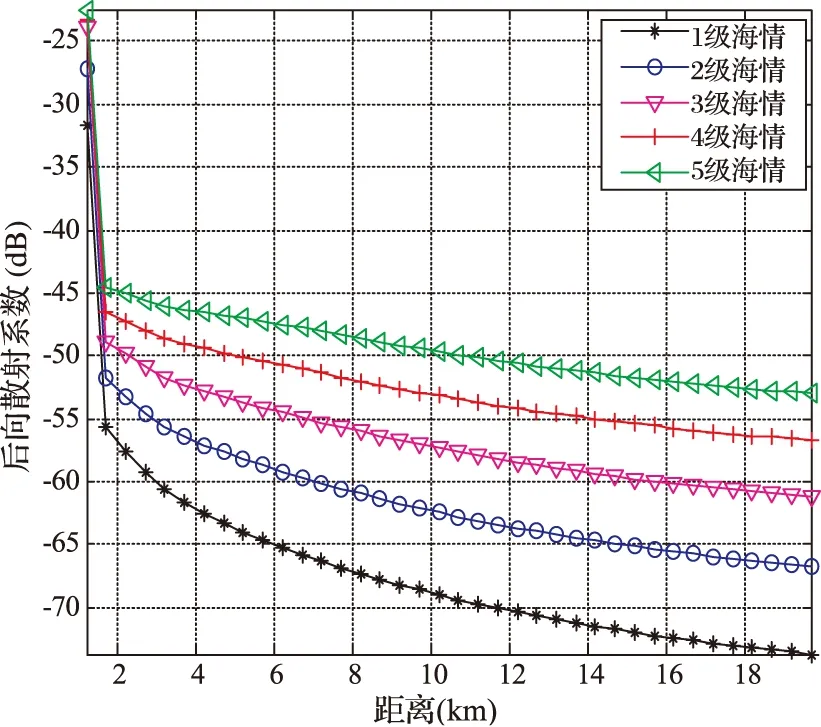
图2 水平极化条件下的后向散射系数(L波段)
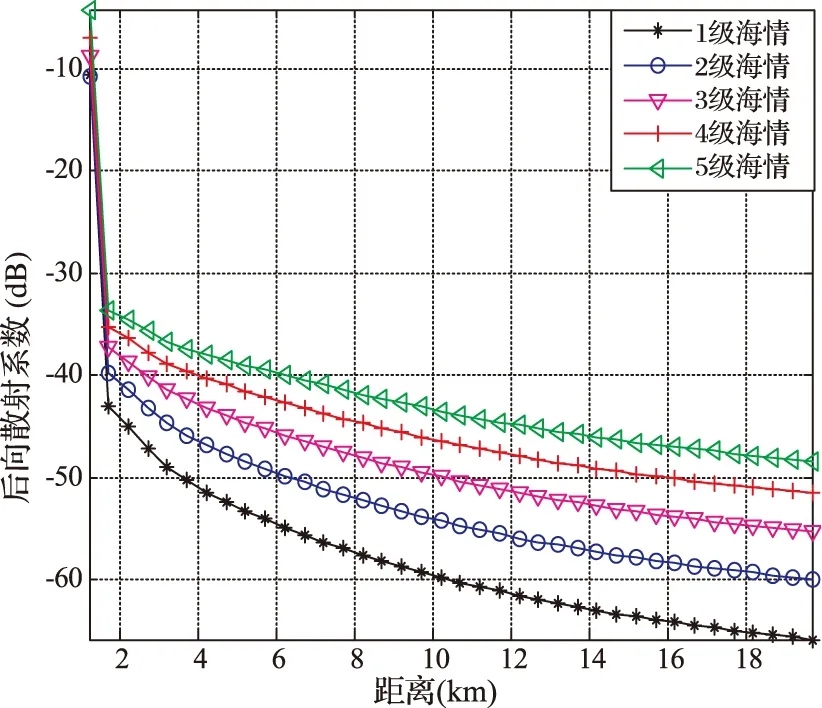
图3 垂直极化条件下的后向散射系数(L波段)
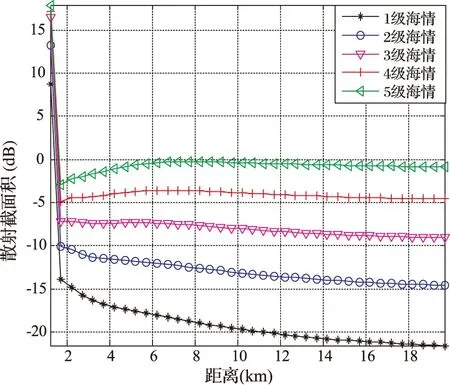
图4 不同海情下的目标散射截面积(水平极化)
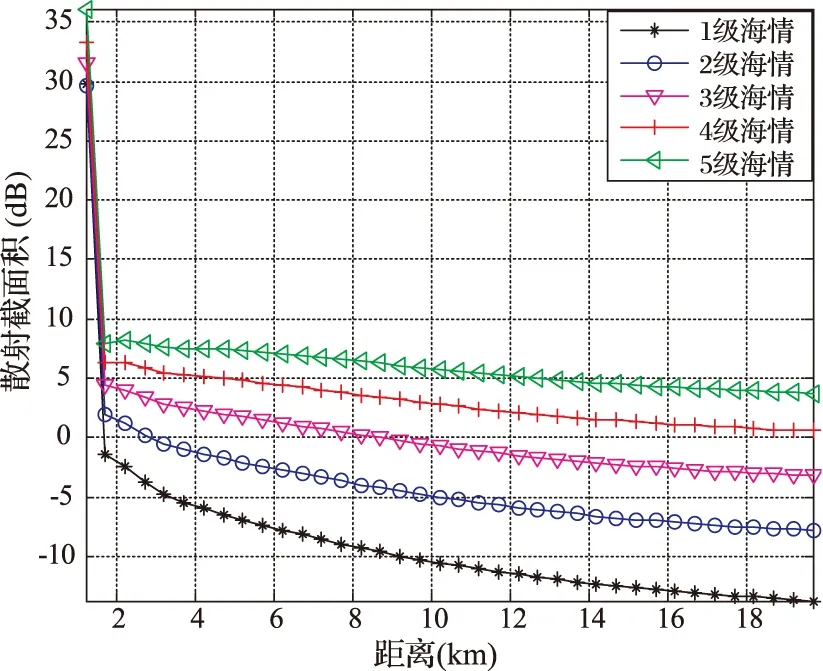
图5 不同海情下的目标散射截面积(垂直极化)
5.2 杂噪比计算
雷达方程为[3]
在探测距离为20 km、3级海情、水平极化、雷达全阵收发条件下,杂噪比计算结果见表1,满足大于15 dB的设计要求。
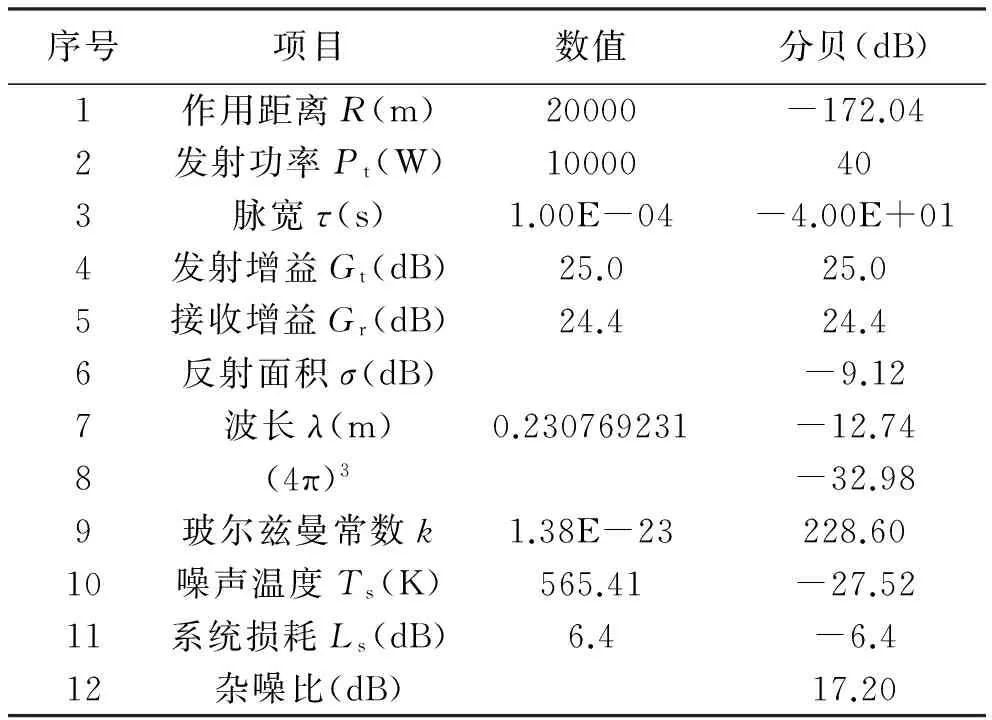
表1 杂噪比计算
图6和图7分别给出了水平极化和垂直极化条件下不同距离、不同海情下的杂噪比计算结果。由图中可以看出,在20 km处,3级及以上海情下海杂波杂噪比均大于15 dB。
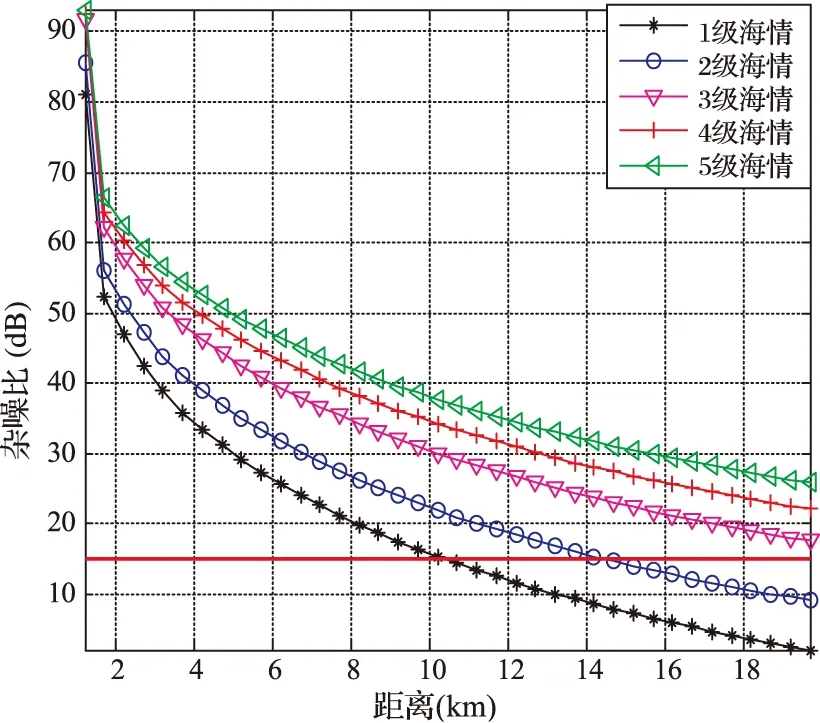
图6 不同海情下的杂噪比(水平极化)
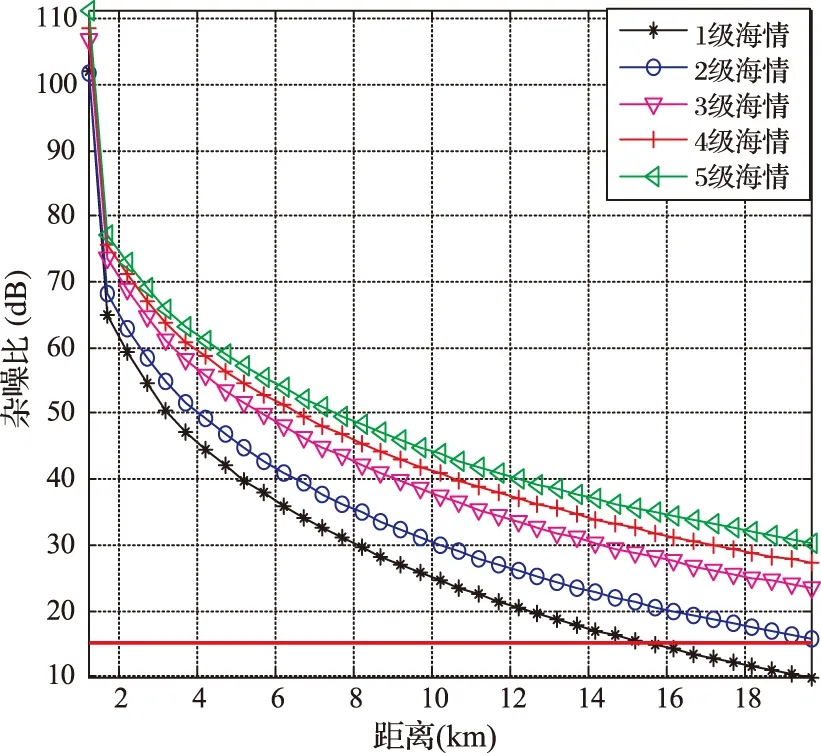
图7 不同海情下的杂噪比(垂直极化)
6 结束语
本文主要研究了海岛固定式海杂波测量雷达总体设计技术。针对海杂波测量雷达的关键技术进行了分析,并给出了相应解决措施。最后对不同海情下海杂波反射截面积和杂噪比进行了分析与计算。本文给出的海杂波测量雷达总体设计技术可为相关研究和应用领域提供参考。
[1] H Wang,L Cai. On adaptive Spatial-Temporal Processing for Airborne Surveillance Radar Systems[J]. IEEE Transactions on Aerospace and Electronic Systems,1994,30(3):850-853.
[2] 丁鹭飞,耿富录,陈建春. 雷达原理[M]. 北京:电子工业出版社, 2009.3:20-21.
[3] 张光义, 赵玉洁. 相控阵雷达技术[M]. 北京:电子工业出版社, 2006.12:60-66.
Research on overall design technology of sea clutter measurement radar
DONG Jin-liang, HAN Chang-xi, LI Xu
(Nanjing Research Institute of Electronics Technology, Nanjing 210013)
Based on the project of the fixed sea clutter measurement radar on an island, the overall design technology of the sea clutter measurement radar is studied. The overall design characteristics of the sea clutter measurement radar are analyzed from the demands, and the working principle, the working modes and the key technologies of the overall radar are described. Finally, the main specifications of the sea clutter measurement radar are analyzed and calculated with the results given.
sea clutter measurement; data collection; clutter extraction; clutter-to-noise ratio
2016-09-10
董金良(1984- ), 男,硕士,工程师,研究方向:地面情报雷达总体设计、信息融合;韩长喜(1983-),男,硕士,工程师,研究方向:军事电子装备科技情报研究;李旭(1984- ), 男 ,硕士,工程师,研究方向:地面火控雷达总体设计。
TN959.6
A
1009-0401(2016)04-0001-04
