一种NLOS场景TOA估计方法与实测门限优化
2016-12-29陈大伟张继良丁丽琴
陈大伟,汪 洋,张继良,丁丽琴
(哈尔滨工业大学 深圳研究生院,广东 深圳 518055)
一种NLOS场景TOA估计方法与实测门限优化
陈大伟,汪 洋,张继良,丁丽琴
(哈尔滨工业大学 深圳研究生院,广东 深圳 518055)
针对峰值检测法估计TOA精度较低的问题,在现有门限法的基础上,提出了一种室内非视距场景的TOA估计方法,利用实测数据进行门限优化。仿真结果表明,与传统峰值检测法相比,门限优化法TOA估计精度提高54.5%,系统定位精度提高逾1 m。
到达时间;峰值检测;门限优化
室内定位以其在消防救援、智慧家庭、商场导购等领域良好的应用前景而备受人们重视。基于到达时间(TOA)的室内定位方法因具有较高精度而被广泛应用。该方法的关键技术是从定位信号中检测出到达接收机的第一个信号径分量(direct path,简称DP),根据其传播时延计算出测量距离,进而结合相应定位算法解算出目标节点位置。然而,相比于室外空旷环境,室内环境人员密集、障碍物遮挡严重,TOA估计精度受限[1]。一方面,直达径信号传播受到阻挡,能量损耗严重。另一方面,室内环境中存在大量的密集多径,在密集多径信号中估计首径分量的TOA存在困难[2]。
近年来,TOA估计算法得到了深入的研究。一种广泛应用的方法是基于匹配滤波的TOA估计方法,该方法将接收的多径信号与本地模板信号进行匹配滤波,获取滑动相关峰。针对相关峰,采取不同的处理方法,即可获得不同精度的TOA估计结果。另一种最常用的方法是峰值检测法,检测滑动相关峰中功率最大的峰作为首径所在的相关峰,其时延即为待估计的TOA。这种方法的前提是首径在接收信号中是能量最强的单径分量。LOW等[3]将峰值检测法应用到超宽带测距中,检测接收信号脉冲最大值估计TOA。由于超宽带穿透力、抗干扰性强的特点,弥补了峰值检测法的不足。刘晓建等[4]在做相关输出时,输入是多径信号和构造的本地锯齿波,检测相关输出的最大值点估计TOA。该方法简化了峰值检测法的运算量,但是TOA估计精度降低。LEE等[5]建立了相关输出的似然函数,寻找似然函数最大时的相关输出来估计TOA,该方法增大了运算量,但能提高TOA估计精度。SATTARZADEH等[6]分析了TOA估计误差与相关输出中峰值和峰值点斜率的对应关系,建立查询表,对任意输出,通过查表方法估计TOA。该方法对不同的场景建立不同的查询库,略显繁琐。还有一种比较新颖且精度较高的方法是基于门限的TOA估计方法。GUVENCI等[7]根据相关输出波形的最大值和最小值设定归一化门限,把低于门限的成分作为噪声除掉,第一个大于门限的抽样值即为首径信号所在的能量块。WANG等[8]通过迭代法不断更新门限以获取最优门限,相比文献[7]的TOA估计性能得到了较大提高。门限设置都需要同时检测相关输出峰的最大峰值和最小峰值,仅从理论上给出可能提高估计精度的门限设置方法,还未从实测数据上进行验证。为此,提出了一种基于门限优化的TOA估计方法。
1 系统模型
1.1 定位信号的数学模型
发射信号s(t)是码长为1023的m序列调制的扩频信号,扩频码片长度T=100 ns,采用2PSK调制方式,信号带宽B=20 MHz。将发送信号送入频率响应为H(f)的信道中,由接收端接收。接收信号r(t)是s(t)与h(t)卷积的结果,设其是一个具有L个路径的多径信号,可表示为
(1)
其中:τD<τ2<…<τL,第一条到达路径就是要估计的首径DP;aDP为首径的幅度;ai为第i条路径信号的幅度;τi为第i个路径的时延;τD为待估计的TOA,由光速即可计算出测量距离。TOA的估计精度直接影响系统定位精度。
1.2 TOA测距定位系统
TOA测距定位系统由测距部分和定位部分组成。测距部分重点研究TOA估计方法,设计改善测距性能的方案。定位部分结合现有的定位算法,研究测距性能的提高给定位带来的积极影响。
在做测距时,为简化系统复杂度,假设各个节点的信号严格时间同步。图1为一个典型的TOA测距定位系统。由基站B1、B3、B3和移动台M组成。记ti为移动台获取的来自3个基站的定位信号的传播时间,通过TOA估计方法获得。di=cti(1≤i≤3)为测量距离,c为光速。

图1 TOA定位原理图Fig.1 TOA positioning schematic diagram
TOA的测距方程组如式(2)所示。其中:(x,y)为M的坐标;(xi,yi)为Bi的坐标,1≤i≤3。
由于d1、d2、d3含有误差,直接解式(2),定位精度较差,需要设计精度较高的定位算法。利用近似极大似然定位算法(AML)[13]考察门限法和峰值检测法估计TOA的系统的定位性能。
2 基于门限优化的TOA估计算法
2.1 峰值检测法估计TOA
将接收到的多径信号r(t)与本地模板信号s(t)同时输入匹配滤波器,得到滑动相关函数
(3)
利用信号参数及信道数据随机生成了4个滑动相关波形,如图2所示。图2只给出了500 ns以内部分,并不影响实际分析。精确时延由信道测量时测量的收发天线距离除以光速获得。
峰值检测法检测相关峰中最大峰估计TOA。在存在直射径情况下,最大峰即首径所在的峰,此时峰值检测法具有较高TOA估计精度。根据精确时延判断,图2(a)的最大峰是首径所在峰,图2(b)、(c)、(d)首径所在峰是最大峰前的一个峰。峰值检测法估计TOA的误差分别为7、61、74、66 ns。

图2 峰值检测法估计TOAFig.2 Estimating TOA by peak detection
2.2 门限法估计TOA
门限法估计TOA是将滑动相关峰中只含噪声的相关峰成分与噪声和信号的混合成分分离,检测第一个含有信号的相关峰,其时延即是待估计的TOA。提出的门限法估计TOA分为3个过程:
1)检测相关峰中功率最大的峰。仿真出发射信号s(t),经过自由空间传播,利用信道测量的数据H(f),得到接收信号r(t),将r(t)与原信号s(t)滑动相关,得到滑动相关函数,检测滑动相关函数所有峰值中幅值最大的峰值,记最大的幅值为pm。


已经求得20 MHz带宽下实测场景的最优门限值ξo=-4.8 dB,分别求得图3(a)、(b)、(c)、(d)中虚线的搜索边界。提取搜索边界以上的时延最小的相关峰作为首径所在相关峰,其时延就是TOA。得到的TOA提取误差分别为7、6、24、16 ns。由此可知,门限法估计TOA时,对于不同的滑动相关波形,无论首径是否是最大功率径,均能提取出其所在的相关峰,相比于峰值检测法,具有较高的精度。
3 基于实测的门限优化
最优门限ξo受定位场景及信号带宽等因素影响,对于特定场景的定位,计算最优门限再估计TOA,通过信道测量获取了大量的实测数据,进而优化门限。
3.1 测量平台与测量方案
测量平台为哈尔滨工业大学深圳研究生院自主研发的室内宽带信道测量仪,由矢量网络分析仪、功率放大器、天线、同轴电缆等构成,测量频率可调,如图4所示。

图3 门限法估计TOAFig.3 Estimating TOA by threshold

图4 信道测量平台Fig.4 Channel measurement platform
测量场景为哈尔滨工业大学深圳研究生院A栋教学楼4楼,平面图如图5所示。发射天线TX置于走廊,位置固定,接收天线RX置于两侧的教室内,发射天线与接收天线之间有墙壁阻隔,场景内多径分布密集。测量时发射天线位置不变,每进行一个位置测量接收天线移动一次,同时测量收发天线的直线距离,以便求取真实TOA值,测量得到信道频率响应为H(f)[9-12]。测量参数如表1所示。
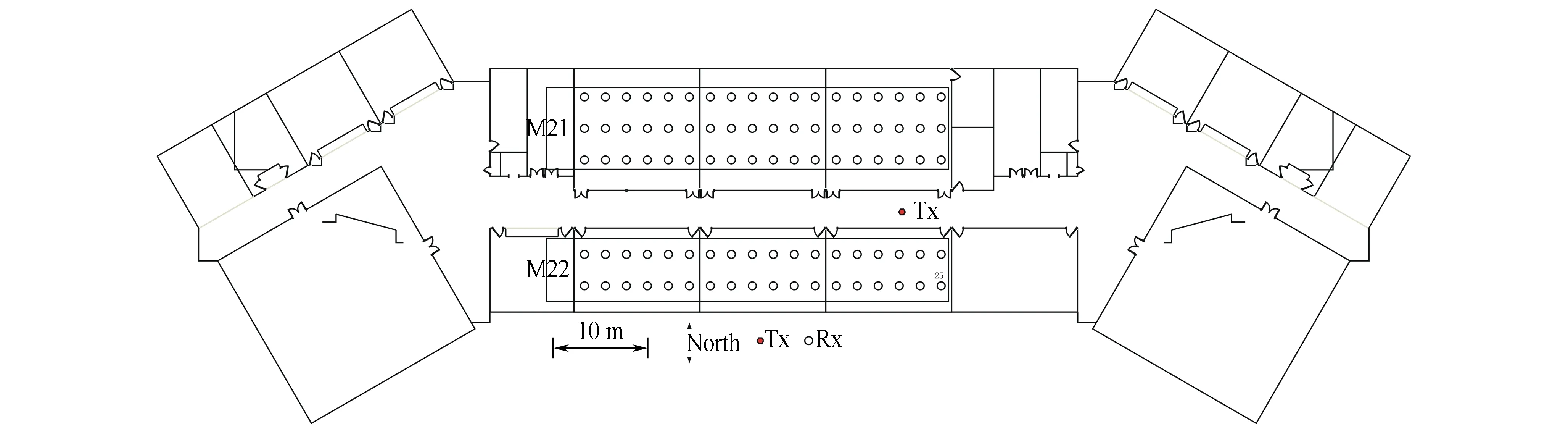
图5 信道测量平面图Fig.5 Planar graph of channel measurement
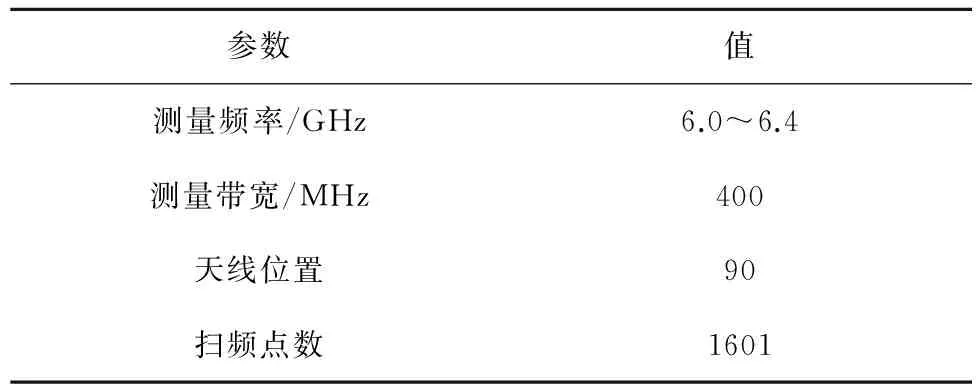
参数值测量频率/GHz6.0~6.4测量带宽/MHz400天线位置90扫频点数1601
3.2 门限优化方法

(4)
遍历ξ,得到平均绝对误差与门限的关系,如图6所示。
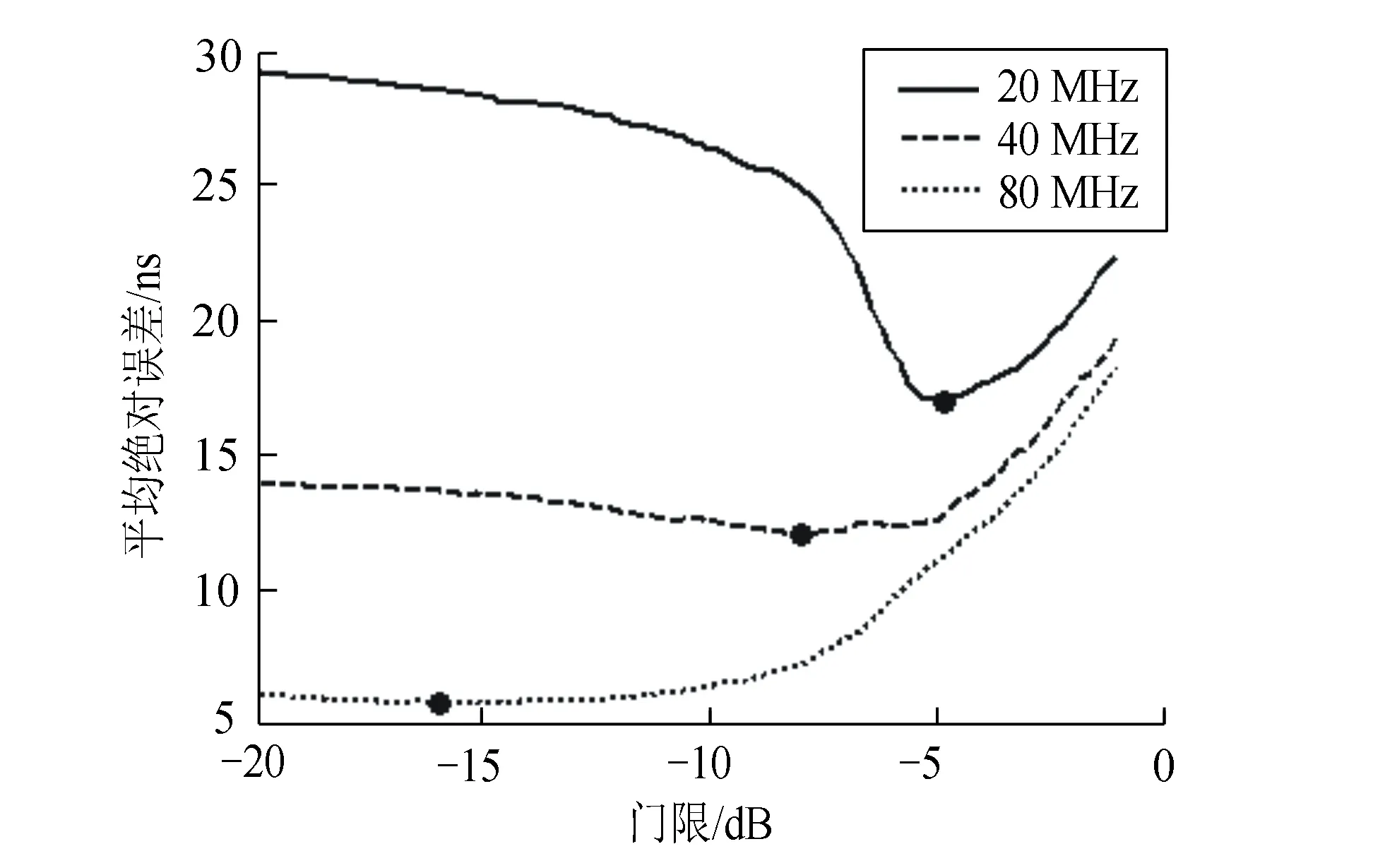
图6 平均绝对误差与门限关系Fig.6 Relationship between MAE and threshold
对于已定带宽的情况下,存在最优门限ξo,使得TOA估计平均绝对误差最小,20MHz的最优门限ξo=-4.8dB。表2为不同带宽下门限法和峰值检测法TOA估计的最优门限及平均估计误差值。由表2可知,在10~100MHz,随带宽增大,最优门限逐渐减小,其平均估计误差也相应减小。
4 测距与定位性能分析
4.1 测距性能分析
TOA定位系统中,测距性能决定着定位精度的优劣,带宽是影响TOA测距的主要因素之一,分别利用门限法和峰值检测法得到各自不同带宽下的测距平均误差,结果如图7所示。
表2 门限法和峰值检测法的最优门限和估计误差
Tab.2Optimalthresholdandestimationerrorofthresholdandpeakdetection
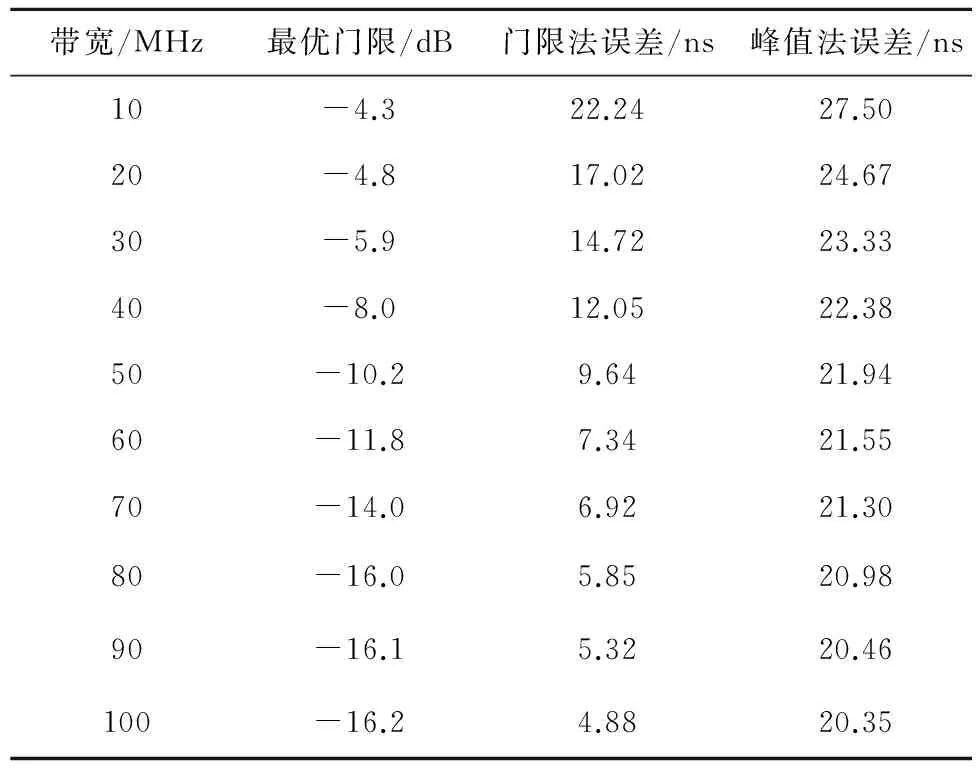
带宽/MHz最优门限/dB门限法误差/ns峰值法误差/ns10-4.322.2427.5020-4.817.0224.6730-5.914.7223.3340-8.012.0522.3850-10.29.6421.9460-11.87.3421.5570-14.06.9221.3080-16.05.8520.9890-16.15.3220.46100-16.24.8820.35
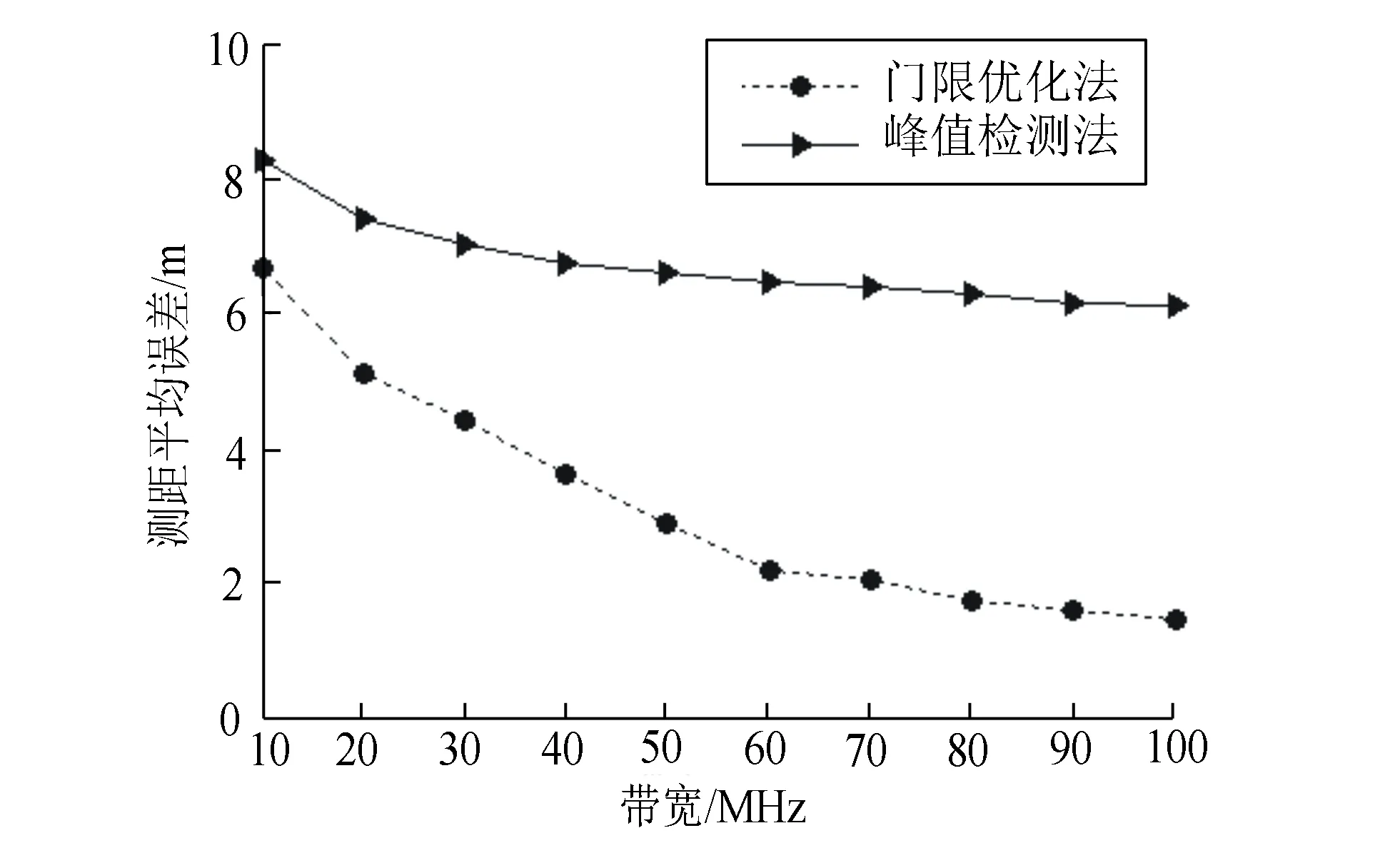
图7 测距平均误差与带宽的关系Fig.7 Relationship between ranging mean error and bandwidth
从图7可看出,在带宽一定的情况下,门限法的测距精度高于峰值检测法,随着带宽增大,门限法的优势逐渐显现。为综合衡量2种算法的优劣,定义带宽范围内的平均测距精度提高程度为
(5)

4.2 定位性能分析
20MHz下,已求出门限优化法TOA测距误差
为考察测距性能的提高给定位性能带来的影响,设置4个参考节点的方形定位区域,坐标分别为(-100,100),(-100,-100),(100,100),(100,-100)。不失一般性,均匀选取目标节点A(0,0),B(50,0),C(100,0),D(150,0),E(50,-50),F(150,-150),如图8所示。
采用文献[13]的AML,测距误差替换为TOA估计的误差。每个节点仿真3000次,估计均方差可表示为:
(6)

图8 定位节点布局Fig.8 Layout of location nodes
仿真得到不同目标节点下的定位精度,如表3所示。

表3 定位结果
由表3可知,AML算法影响定位精度的主要因素是测距误差的方差σ2,误差方差越大,定位精度越低。门限法的测距误差方差26.4m2小于峰值检测法的37.8m2,其定位性能得到提高,表3的结果也验证了这一点。相比于峰值法,门限法平均定位精度提高超过1m。可以预见,对于其他形式的定位区域,门限法的定位性能仍高于峰值检测法。
5 结束语
室内环境的复杂性使得TOA估计相对困难。传统的峰值检测法对存在直射路径的场景具有较高的TOA估计精度,此时匹配滤波获得的相关峰中功率最大的峰就是首径所在峰,然而一旦无直射路径,其估计性能显著下降。针对室内非视距提出了一种基于门限优化的TOA估计方法,在相关峰中利用判决门限确定首径搜索区域,在该区域内寻找时延最小的峰,并把该峰作为首径所在的峰,其时延为待估计的TOA。通过实测数据对门限进行优化,获取了一定带宽下典型室内非视距场景TOA估计的最优门限。研究表明,在不同信号带宽下,门限法较之峰值检测法平均TOA估计精度提高54.5%,系统定位精度提高1m以上。
[1]ROXINA,GABERJ,WACKM,etal.Surveyofwirelessgeolocationtechniques[C]//GlobecomWorkshops,IEEE,2007:1-9.
[2]HEJ,PAHLAVANK,LIS,etal.ATestbedforevaluationoftheeffectsofmultipathonperformanceofTOA-basedindoorgeolocation[J].IEEETransactionsonInstrumentationandMeasurement,2013,62(8):2237-2247.
[3]LOWZN,CHEONGJH,LAWCL,etal.Pulsedetectionalgorithmforline-of-sight(LOS)UWBrangingapplications[J].IEEEAntennasandWirelessPropagationLetters,2005,4(1):63-67.
[4] 刘晓建,王智博,郑霖.能量包络的简单TOA估计研究[J].计算机工程与应用,2012,48(5):78-80.
[5]LEEJY,SCHOLTZR.RanginginadensemultipathenvironmentusinganUWBradiolink[J].IEEEJournalonSelectedAreasinCommunications,2002,20(9):1677-1683.
[6]SATTARZADEHSA,ABOLHASSANIB.TOAextractioninmultipathfadingchannelsforlocationestimation[C]//IEEEInternationalSymposiumonPersonalIndoorandMobileRadioCommunications,2006:1-4.
[7]GUVENCI,SAHINOGLUZ.Threshold-basedTOAestimationforimpulseradioUWBsystems[C]//IEEEInternationalConferenceonUltra-Wideband(ICUWB),2005:420-425.
[8]WANGX,YINB,LUY,etal.IterativeThresholdselectionforTOAestimationofIR-UWBsystem[C]//2013IEEEInternationalConferenceonGreenComputingandCommunicationsandIEEEInternetofThingsandIEEECyber,PhysicalandSocialComputing,2013:1763-1766.
[9]ZHANGJL,WANGY,DINGLQ,etal.Biterrorprobabilityofspatialmodulationovermeasuredindoorchannels[J].IEEETransactionsonWirelessCommunications,2014,13(3):1380-1387.
[10]ZHANGJL,WANGY,DINGLQ,etal.MIMOchannelmeasurementandcharacterizationat6.0-6.4GHzundertypicalclassroomenvironment[J].JournalofHarbinInstituteofTechnology,2014,21(1):69-76.
[11] 张继良,汪洋,丁丽琴,等.6.0-6.4GHz室内MIMO无线信道测量与传播特性分析[J].电子学报,2012,40(6):1213-1217.
[12]DINGLQ,WANGY,ZHANGJL,etal.Investigationofspatialcorrelationfortwo-usercooperativecommunicationinindoorofficeenvironment[C]//IEEEICCT,2010:420-423.
[13]CHANYT,HANGHYC,CHINGPC.Exactandapproximatemaximumlikelihoodlocalizationalgorithms[J].IEEETransactionsonVehicularTechnology,2006,55(1):10-16.
编辑:梁王欢
A TOA estimation method and measured threshold optimization in NLOS scenery
CHEN Dawei, WANG Yang, ZHANG Jiliang, DING Liqin
(Harbin Institute of Technology, Shenzhen Graduate School, Shenzhen 518055, China)
Aiming at the low precision of TOA estimation by peak detection, on the basis of the existing threshold method, a TOA estimation method under indoor NLOS scenario is proposed. The threshold is optimized using measured data. Simulation results show that, compared with conventional peak detection, threshold optimization can increase average TOA estimation accuracy by 54.5%, and the system positioning accuracy by over 1 meter.
TOA; peak detection; threshold optimization
2016-01-05
国家自然科学基金(61371101);深圳市生物、互联网、新能源、新材料产业发展专项资金(JC201104210030A)
汪洋(1977-),男,黑龙江人,副教授,博士,研究方向为MIMO无线通信。E-mail:wangyang@hitsz.edu.cn
陈大伟,汪洋,张继良,等.一种NLOS场景TOA估计方法与实测门限优化[J].桂林电子科技大学学报,2016,36(6):442-448.
TN915.01
A
1673-808X(2016)06-0442-07