机械手D-H坐标系建立分析
2016-12-28孙伏
孙 伏
(陕西理工大学 机械工程学院, 陕西 汉中 723000)
机械手D-H坐标系建立分析
孙 伏
(陕西理工大学 机械工程学院, 陕西 汉中 723000)
在机械手和空间机构分析时,D-H分析法使用广泛。但是在建立D-H坐标时,中间连杆有两个关节,连杆的坐标是建在前关节还是后关节上,该问题会引起理解和处理的困扰。在明确了D-H法及其参数含义的基础上,通过两种不同位置D-H坐标的建立和分析对比,说明了两种方法是完全等价的。通过实例,分析对比了两种方法的D-H参数表和运动学方程,总结出在D-H法分析时D-H坐标选择方法和注意事项。
D-H坐标; 关节; 参数表 运动方程
在机械手和空间机构中,连杆的主要功能是保持其两端的关节轴线具有固定的几何关系,连杆的特征也可由这两条轴线规定。为了研究机械手各连杆之间的位移关系,可在每个连杆上固联一个坐标系,借助这些坐标系进行机构分析。
1955年,Denavit和Hartenberg提出一种标准通用的方法,命名为D-H法[1],采用将连杆坐标系建立在后关节上的方法进行分析[1-5],而有人提出将连杆坐标系建立在其前关节和后关节是等价的[6],并采用将连杆的坐标系建在前关节上进行分析[6-9]。但是两种方法坐标轴的建立和分析过程都各有不同,给理解和应用带来了困扰。
本文在明确D-H法连杆坐标系各坐标轴定义的基础上,针对转动关节和移动关节、中间连杆和首末杆,进行两种坐标系建立方法的对比,分析了注意事项和选择方法。
1 D-H坐标系
D-H法建立连杆坐标系时,以连杆上的关节轴线为z轴,方向任意;以连杆两端关节轴线的公法线为x轴,方向由前关节指向后关节;交点为坐标原点。x、y和z轴形成右手坐标系。
建立D-H坐标以后,在描述连杆自身和连杆与前一连杆之间的运动关系时(即对连杆i)有4个参数:连杆长度ai(连杆的前关节i和后关节i+1轴线间公法线的长度)、连杆扭角αi(两关节轴线间的夹角)、连杆距离di(前关节i轴线上两条公法线之间的距离),连杆夹角θi(在垂直于关节i轴线的平面内两条公法线之间的夹角)。
而中间连杆有两个关节,同时公法线和两关节都有交点,以哪个交点作为本连杆的坐标原点?建立坐标的方法有什么不同?下面进行分析。
2 两种建立D-H坐标方法的分析对比
2.1 连杆两端为转动关节的情况
当机械手的各关节为转动关节时,对其中的连杆i,如图1和图2所示,前关节为关节i,后关节为i+1。
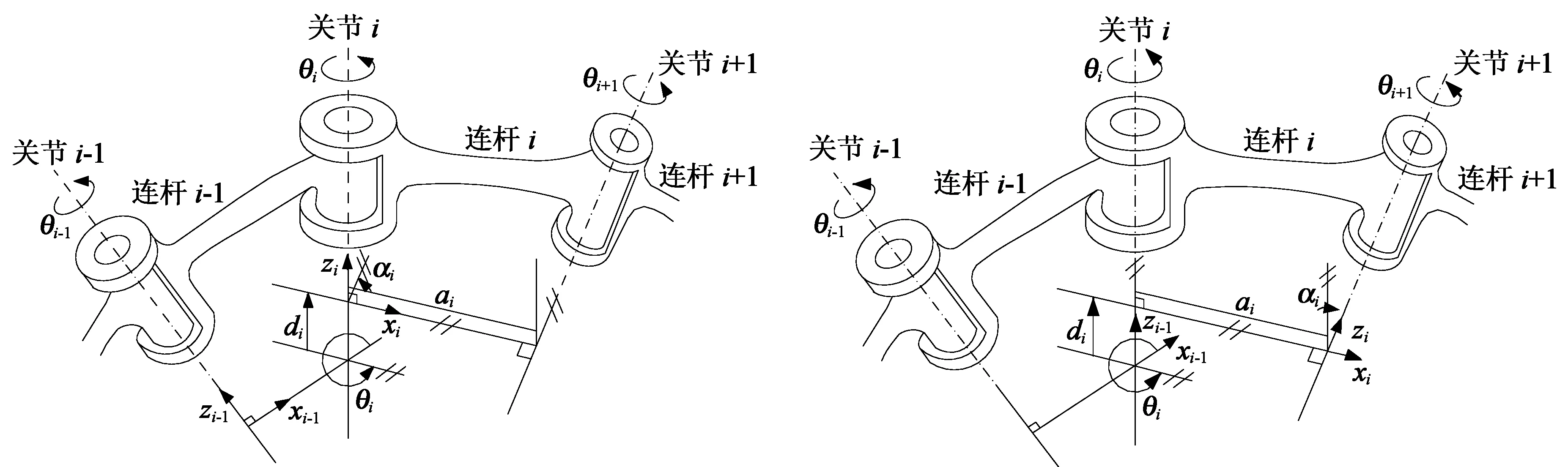
图1 连杆坐标建在前关节 图2 连杆坐标建在后关节
图1将连杆坐标建在前关节上。对连杆i,以关节i的轴线为坐标zi轴,两端关节轴线的公法线为xi轴,方向指向后关节,xi轴与zi轴的交点为坐标原点,依次建立各连杆的坐标系。这样,杆长为ai,扭角为αi。通过关节i轴线上两条公法线间的距离和夹角,得到与前一连杆间的距离di和夹角θi。可见,连杆i的D-H坐标及参数集中在关节i附近。特殊地,当两端关节平行时,为处理方便,将xi轴建在使di=0的位置;当两端关节相交时,杆长ai=0,原点取在交点上。
图2将连杆坐标建在后关节上。以关节i+1的轴线为zi轴,连杆距离di和连杆夹角θi仍然在关节i上。
对在连杆i上建立其固联坐标系的两种方法进行对比,结果如表1所示。
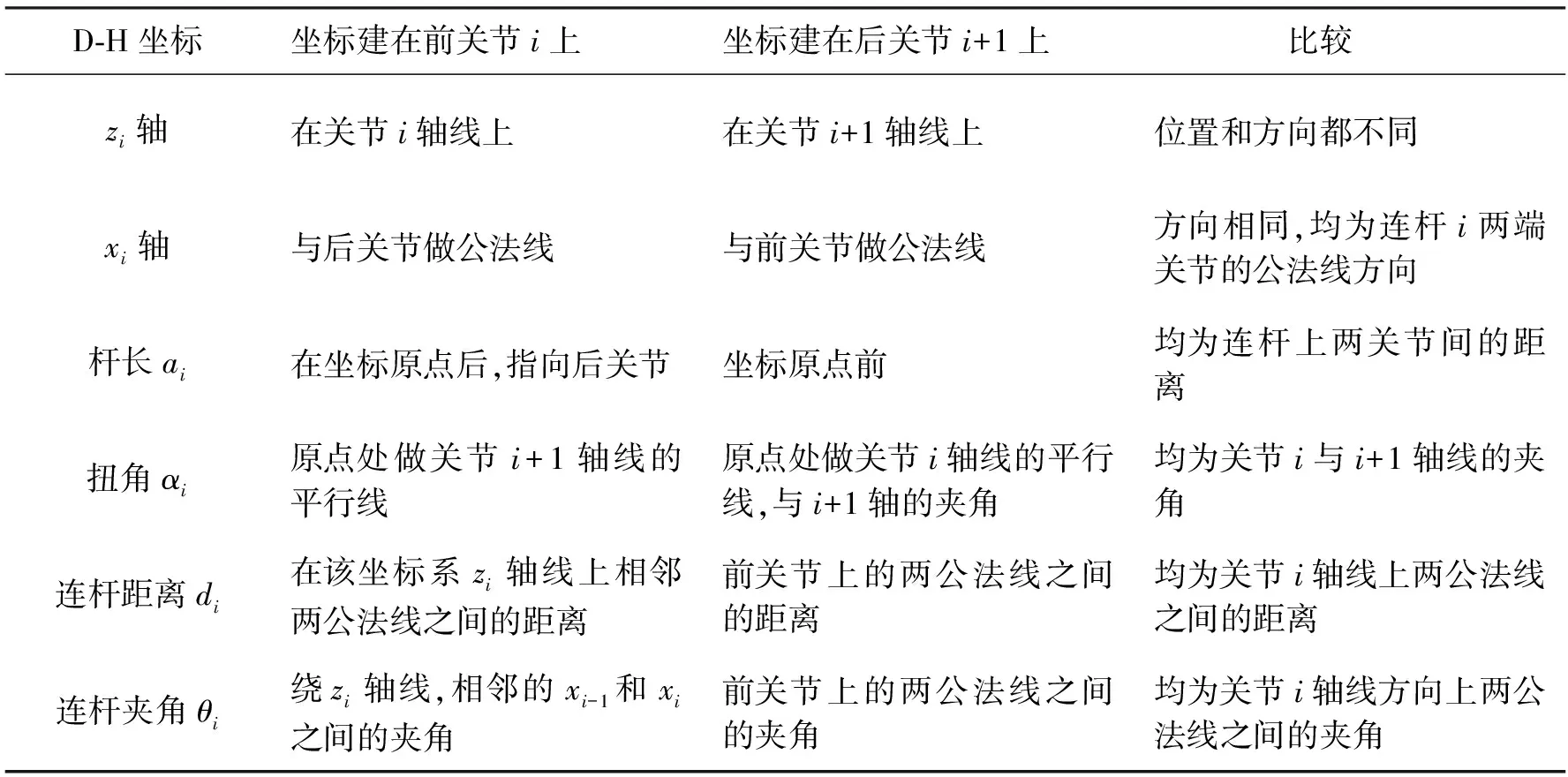
表1 连杆坐标建在前关节和后关节的对比
2.2 连杆上有移动关节的情况
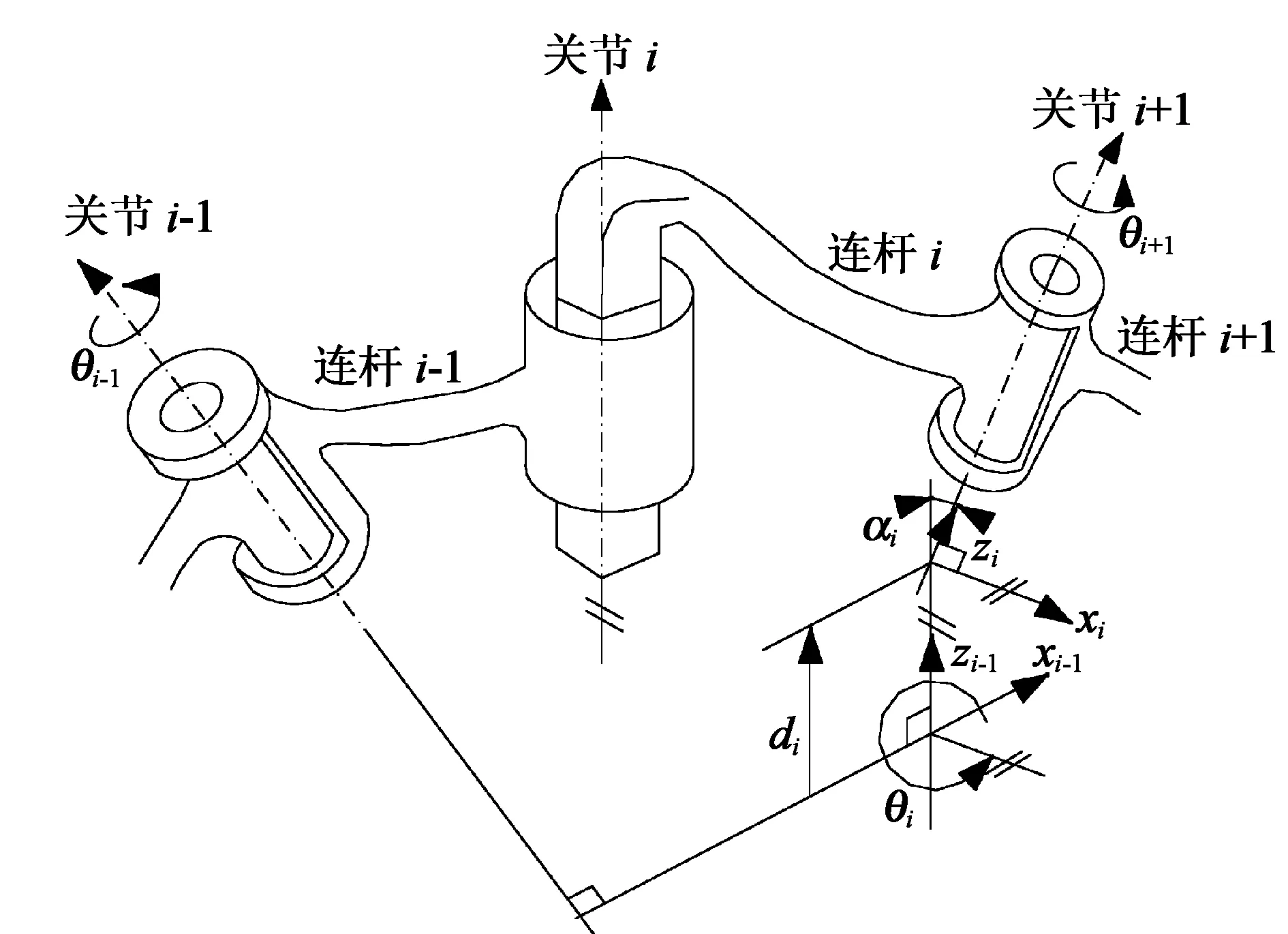
图3 移动关节D-H坐标建立
如图3所示,关节i为移动关节,关节的轴线方向确定,但空间位置没有意义,即连杆杆长没有意义。为处理方便,可在坐标系建立时使其连杆长度为0。
采用坐标建在后关节的方法,如图3所示。连杆的坐标轴zi建在后关节轴线i+1上,选定坐标原点后,过原点做关节i移动方向的平行线,作为zi-1轴,此时xi轴方向为zi-1和zi轴的公垂线方向。注意,在选定连杆的坐标原点时,可以依据后一关节的具体情况。
如果采用坐标系建在前关节的方法,zi轴方向为关节i的移动方向,可使其位置经过关节i-1轴线上一点,以该点为连杆i的坐标原点,再根据坐标定义做出其他坐标轴即可。此时,连杆i-1的杆长为0,连杆i的长度为zi和zi+1间公法线的长度。
2.3 基座和末端杆坐标系的建立
基座上建立的是基坐标系{0},固定不动,原则上可任意规定。一般规定,在关节1上建立基坐标系,z0方向为关节1的轴线方向,x0轴应和关节1的关节变量为0时的x1轴重合,即关节1为转动关节时,位于θ1=0处,为移动关节时,位于d1=0处。
这样,当坐标系建在前关节上时,坐标系{0}和{1}初始位置重合。杆长a0=0和扭角α0=0。相应地,当坐标系建在后关节上时,{0}和{1}不重合。
机械手的末端杆n也只有一个关节,一般将其坐标建在关节n上。因此当坐标系建在前关节上时,{n}的zn沿关节n方向,xn方向指向末端手爪;当坐标系建在后关节上时,原点可与连杆n-1的原点重合,xn可选择关节n的关节变量为0时xn-1的方向,或根据末端手爪确定。
3 D-H坐标参数表和运动学方程的建立

图4 三自由度机械手
建立各连杆的D-H坐标后,可得到D-H参数表和运动学方程。
以图4所示的三自由度机械手为例,臂长为L1、L2,手部中心离手腕中心的距离为L3,转角为θ1、θ2、θ3,建立运动方程。
方法一 D-H坐标建在前关节上。
如图5所示,连杆1的坐标为z1、x1,图示位置为初始位置,此时基坐标{0}和{1}重合,末端件的坐标原点在手爪关节处。
为得到D-H参数表,从基座开始依次分析,得出当前杆的杆长和扭角、相邻两杆之间的距离和转角,注意关节变量的初始值,按顺序填写在表2所示各行中。

表2 建在前关节时D-H参数表
设连杆i相对于连杆i-1的变换为Ai:
(1)
式中,c表示cos,s表示sin,下同。
将表2中的数值代入式(1),分别求出A1、A2、A3,可得到该机械手的运动学方程:
TF=A1A2A3=

(2)
方法二 坐标系建在后关节上。
此时坐标系{0}建在关节1上,z1和z0轴不重合,结果如图6所示,末端杆的坐标在手爪末端。

图5 坐标建在前关节上 图6 坐标建在后关节上
在列出D-H参数表时,从连杆1开始,结果如表3所示。此时,
(3)
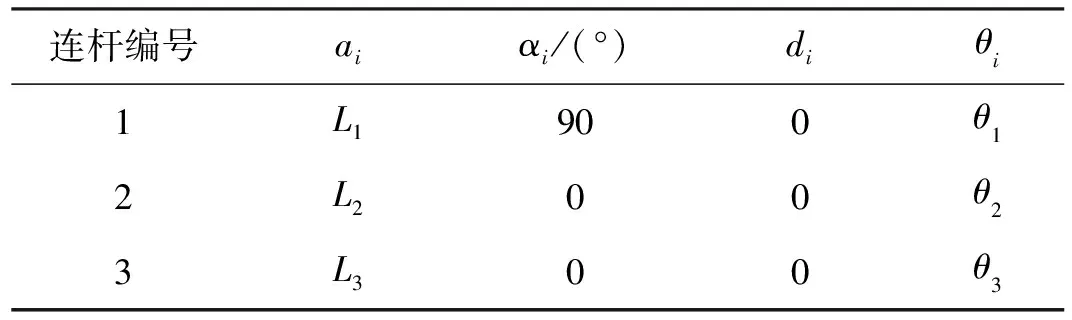
表3 建在后关节时D-H参数表
将表3中的数值代入式(3),此时,机械手的运动学方程为
TB=A1A2A3=

(4)
可用其中某一特殊位置进行验证,如:θ1=0°、θ2=90°、θ3=0°时代入式(3)和式(4),可解得末端件相对基座标的位姿矩阵分别为
和实际位姿相符合,证明了结论的正确性。
4 结 论
针对机械手分析中D-H坐标建立的两种方法,进行了定义的对比和实例分析,可总结出以下特点和注意事项:
(1)无论连杆的坐标系建在哪个关节上,必须明确,x轴均为该连杆两端关节轴线的公法线方向,D-H参数反映该连杆的长度、扭角以及与前一连杆之间的距离和转角;
(2)两种方法所得到的各连杆D-H参数是相同的;
(3)两种不同的坐标系建立方法,导致从前一连杆运动到后一连杆的运动过程不同,在列写D-H参数表时,形式略有不同,连杆坐标系间的变换矩阵也不同;
(4)坐标建在前关节处时,末端件的原点在其关节处,而建在后关节处时,可以到达手爪末端,可方便机械手的分析过程;
(5)基于D-H参数表建立机械手运动方程,对比可见末端件相对于基座的姿态是相同的,而位置不同,这和末端件坐标原点位置不同相符。
[1] 尼库.机器人学导论[M].北京:电子工业出版社,2013.
[2] 项有元,陈万米,邹国柱.基于D-H算法的自主机器人机械臂建模方法研究[J].工业控制计算机,2014,27(7):113-115.
[3] 李瑞霞,李粉霞,杨洁明,等.基于D-H法的串联机械手臂工作空间分析[J].机床与液压,2015,43(21):70-73.
[4] 牛元会,程光明,杨志刚.D-H坐标系下机械手正向运动学分析[J].机械工程师,2006(7):27-29.
[5] 杨前明,闫九祥,王世刚,等.基于D-H位移矩阵法的溢油回收系统扫油臂运动学建模[J].山东科技大学学报:自然科学版,2014,33(1):92-97.
[6] 熊有伦.机器人技术基础[M].武汉:华中科技大学出版社,1996.
[7] 蔡自兴.机器人学[M].北京:清华大学出版社,2009.
[8] 丁华锋,曹宇,杨真真,等.基于D-H法的多连杆正铲挖掘机运动学分析与包络图绘制[J].燕山大学学报,2014,38(3):197-203.
[9] 郭大宝,梅涛,骆敏舟,等.老人服务机器人机械臂的动力学分析与轻量化设计研究[J].中国机械工程,2012,23(10):1146-1150.
[10] 甘屹,王均垒,孙福佳.基于给定工作空间的6R型机器人D-H参数优化设计[J].中国机械工程,2014,25(22):3003-3011.
[11] 孙良,赵匀,俞高红,等.基于D-H变换矩阵的宽窄行分插机构运动特性分析与设计[J].农业工程学报,2012,28(5):13-18.
[12] 张翔,李立君,易春峰,等.基于D-H法油茶果采摘机器人正运动学分析[J].农机化研究,2014(4):25-28.
[责任编辑:魏 强]
Building D-H coordinate system analysis to robots
SUN Fu
(School of Mechanical Engineering, Shaanxi Sci-Tech University, Hanzhong 723000, China)
D-H method is used widely when analyzing robots and spatial mechanism. However, the fact that there are two joints in middle connecting rod has caused difficulty in understanding and handling in terms of building the linkage’ coordinate on the previous or rear joint. On the basis of clarifying the parametric implication, the study has tried building and comparing two methods. It shows that the two methods have achieved equal results. Through examples, the study analyzes D-H parameter list and kinematical equation with the two methods and comes up with D-H coordination selection method when applying D-H coordinates analysis.
D-H coordinates; joint; parameter list; kinematical equation
1673-2944(2016)06-0024-05
2016-07-02
2016-09-21
陕西省教育厅科研计划项目(2013JK1038);陕西理工学院研究生教改项目(SLGYJG1510)
孙伏(1969—),女,陕西省富平县人,陕西理工大学副教授,硕士生导师,硕士,主要研究方向为CAD/CAM、先进制造技术、机构设计与综合。
TH123+.1; TP241
A
