基于TC1002芯片的混合式步进电机驱动器设计
2016-12-28李军科
李军科
(无锡商业职业技术学院物联网学院,江苏无锡 214153)
【自然科学研究与应用】
基于TC1002芯片的混合式步进电机驱动器设计
李军科
(无锡商业职业技术学院物联网学院,江苏无锡 214153)
实现了基于TC1002芯片控制的步进电动机的细分驱动系统。围绕TC1002内部各功能单元设计了相应的外部电路,并对驱动器在不同条件下的性能做了测试。实验表明,驱动系统具有低频噪声小,细分度高与高速不失步等优点。
步进电机;细分驱动;TC1002;电流衰减控制
步进电机被广泛运用于数控机床、自动化生产线、工业仪器仪表、计算机设备等领域中,成为不可或缺的重要组件。但是,步进电机存在低频噪声大的问题,表现在电机走步轻重不均,其原因是换路时电流变化差异所致。显然,绕组电流的控制是改变步进电机低频特性的关键,特别是续流回路在保证器件安全工作的同时,对绕组断电时电流下降的速度影响[1]。
本文采用TC1002两相混合式步进电机驱动芯片,增加外部电压反馈电路、电流保护电路、高精度低噪声电流采样电路、功率驱动电路、电源电路以及电流调整电路,实现了一种低频特性好、细分度高的步进电机驱动器。
一、电机控制设计思路
本设计采用高性能细分步进电机芯片TC1002作为控制器,基于电流滞环控制技术,增加外围功能电路实现了简单高效的电机控制。驱动器采用24V~50V直流工作电源,细分与电流通过拨码开关控制。光藕隔离与逻辑对指令、方向及使能信号进行处理。驱动器设置过电压、欠电压、过电流保护。双H桥功率驱动电流输出开关信号驱动步进电机,通过无感电阻采样相电流并反馈给TC1002。设置电机不工作时电流自动衰减功能及高压保护基准比较。驱动系统框图如图1所示。
二、电机控制方案设计
(一)步进电机细分芯片
TC1002是一个高性能细分步进电机控制器,包含一个模拟SINE/COSINE信号发生器。在一个完整的细分控制系统中,TC1002全面控制电机运行状态。有14种细分等级,TC1002能在任何时候改变电机状态,没有必要复位控制器。它很容易使电机按照使用者设定的固定步数运行。另外在“整步”输出上,当马达长时间工作后,TC1002会指示电机是否还处于整步状态上。TC1002通过输入时钟和方向两种信号就可控制马达,并可以工作在离散状态下。
主控芯片提供了与用户接口的指令脉冲、方向脉冲输入功能。提供过热、过压、A/B相过流四种保护。当系统发现一个错误后,主控芯片会锁存这个错误,并在故障信号管脚输出逻辑高电平状态。进入保护状态后,主控芯片中电流控制单元切断A/B相全桥信号输出。主控芯片细分档位可以通过细分表格根据用户需要选择接口设置,在电机运转过程中或系统复位状态下改变。主控芯片包含内在的sine/cosine发生器和DAC,用来定位A相与B相的相位关系,工作状态输出模拟的正弦/余弦信号。外部指令脉冲经过内部施密特触发器增强信号的抗干扰性,在步进脉冲上沿时刻正弦、余弦输出产生一个增量,增量大小由细分方式选择决定。
(二)基准电压比较与自动减流
电流调节电路包含电阻网络开关、LM339 (U5D)、LM358(U6A/B)、LM317(U9)四个单元器件。8位拨码开关1~3位作为电流挡位设置,4位做手动半流调节,5~8位设置细分挡位,不同的电流挡位对应不同的电阻值。LM317可调节稳压电源输出。12V单电源供电的LM358双运放以跟随器方式实现TC1002内部DAC单元输出的正弦/余弦电压参考信号的幅度调节。另外,TC1002提供了自动电流衰减信号,当电机处在空闲时,在外部最后一个时钟信号脉冲上升沿到来1.5秒后,输出一个高电平减流信号。采用LM339作为比较器,同相输入端是通过电阻分压后用LM358跟随形式产生的2.5V参考电压。TC1002属于5V电源工作器件,高低电平在0与5V之间跳变。匹配电阻参数,使得幅度调节参数在Vref与1/2Vref之间变化,实现电流1/2自动衰减[2](见图2)。Vref值可以通过拨码开关电路设置。
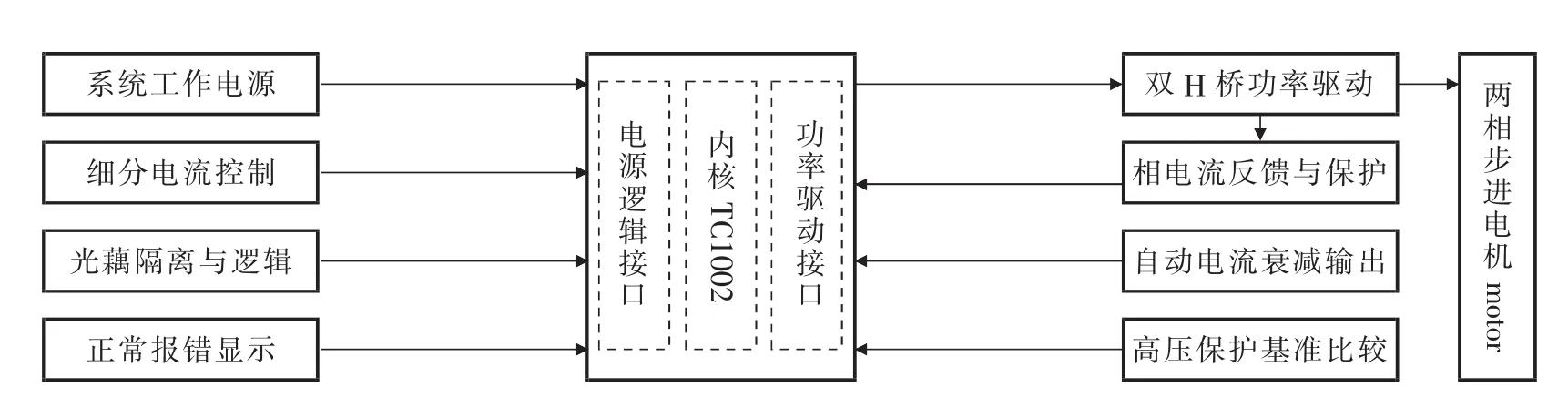
图1 驱动系统结构框图
(三)电流反馈与过电流保护

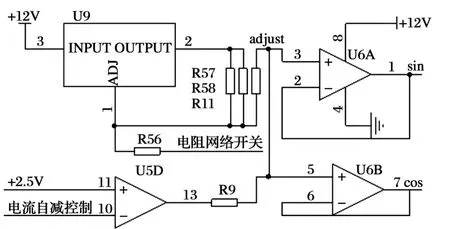
图2 基准电压比较与自动减流

图3 电流反馈与过电流保护
相电流采样信号在另一路与参考的正弦相电压信号比较,从TC1002的功能结构图可以看出,其内部设计了256个点的ROM空间,每个点用8位字长空间存储,考虑到整周期正弦信号与1/4正弦周期的对称性,1/4正弦数据表格存储可以实现最大256细分的步进电机微步驱动。TC1002的细分档管脚MSEL0、MSEL1、MSEL2、MSEL3提供了多达14种不同细分选择。细分选择挡位:2、4、6、8、16、32、64、128、256;5、10、25、50、125、250。C1002内部有一个8位的地址发生器,8位地址可以组合256个状态。8位地址的增加与减少取决于细分选择位与方向信号管脚。
TC1002提供了灵活的查找表用户接口。TC1002允许使用外部查找表合成A相与B相波形,即通过10脚ROM选择脚RSEL的高低电平。当RSEL处于逻辑低电平状态时,内部查找表功能被选择;当RSEL处于逻辑高电平状态时,用户可以用外部查找表合成A相与B相波形。本项目设计RSEL接地选择低电平,采用内部正弦、余弦查找表实现正弦细分波形。
正弦型相电流的波形的频率由外部的用户指令脉冲与细分选择位决定。采用256最大细分时,对于8极50齿2相混合式步进电机,步距角为1.8/256= 0.00703125度。外部指令脉冲频率fc与正弦相电流频率fsin满足:fc=4×256×fsin。正弦波的幅度用电流开关选择的电阻网络决定,即通过电机绕组的电流大小取决于正弦波参考相电压信号幅度。
TC1002正弦波参考相电压信号经RC滤波后与实际反馈的相电流信号比较。比较器采用LM339。比较器输出的高低电平反映实际电流信号与参考信号的误差情况,并作为相电流输入连接TC1002的9脚与21脚。此后,TC1002通过内部电流控制单元对绕组电流进行调节[3]。
(四)功率驱动电路
功率驱动电路包括两个部分:驱动电路和功率主电路。驱动电路是TC1002产生的PWM信号和功率主电路接口,完成将TC1002产生的PWM信号转化为足以驱动开关管动作的信号。功率主电路是一个逆变电路,将外部电源提供的直流电变换为驱动混合式步进电机的交流电。

图4 驱动系统功率驱动电路
本系统采用的功率驱动电路如图4所示。逆变功率开关管采用IRF540N,其额定电压和额定电流分别为500V和20A,采用国际整流器公司产品专用半桥驱动芯片R2101进行驱动。IRF540N导通电阻很小,即使电机长时间运转,该功率管壳本身的温度比较低,无须外加风扇。续流二极管采用1N4148。自举电容采用10uf无极性电容。IR2101是高压高速的IGBT器件驱动芯片,有两个完全独立的高饱真输入与输出通道,且两个通道具有开通慢、关断快的防桥臂直通的互锁功能。门驱动电压10V~20V,5V施密特触发逻辑电平输入,输入输出同相,驱动IGBT高压侧电压可以到达600V。电路设计中,在IGBT的电源与地之间放置4个二极管,使电机两端的电压维持在0~(24V~50V)之间,防止电机两端的电压有过高的上冲或过低的下冲。Vcc电源电压用耐压值为100V,容值为0.1uf的电容滤波,IGBT的栅极连接电阻、二极管以消除信号的振荡[4]。
(五)TC1002电流衰减模式
TC1002提供了快衰减、慢衰减与电流混合衰减模式。用户可以根据驱动器特性匹配电机电感量。通常说来,高电感量电机低速性能较好,设置驱动器为高电流阻尼(快速续流),已确保电流在续流期间快速下降。阻尼有助于电感的快速放电。低电感量电机高速性能好,设置驱动器提供较低的电流阻尼(慢速续流),电机将呈现出良好的工作特性,因为在电感能量泄放过程中无需特别的阻尼帮助。对于一些电感量中等的电机来说,可以设置驱动器为混合续流模式。
(六)系统电源部分设计
选择UC3843电流型PWM控制器作为开关电源的调节单元。开关电源输入为20V~50V直流,输出为12V直流稳压。T1为高频开关变压器。刚上电时,外部输入的24V~50V电压经电阻R26分压后向UC3843芯片提供启动电压。正常工作时,次级线圈上的输出电压12V就作为UB3843正常工作电压。R23是开关管的栅级限流电阻。为保证开关电源输出直流电压不受干扰,电路中提供了稳压电路。NMOS管源极串接电阻R22,把电流信号变为电压信号,送入UC3842作为比较电压,控制激励脉冲的占空比,达到稳压目的。电流取样电阻的值不能取得太大,否则在工作中取样电阻温度升高,取样环路检测电压变大,自动调整PWM占空比,会使电压衰减(见图5)。
三、驱动器性能测试
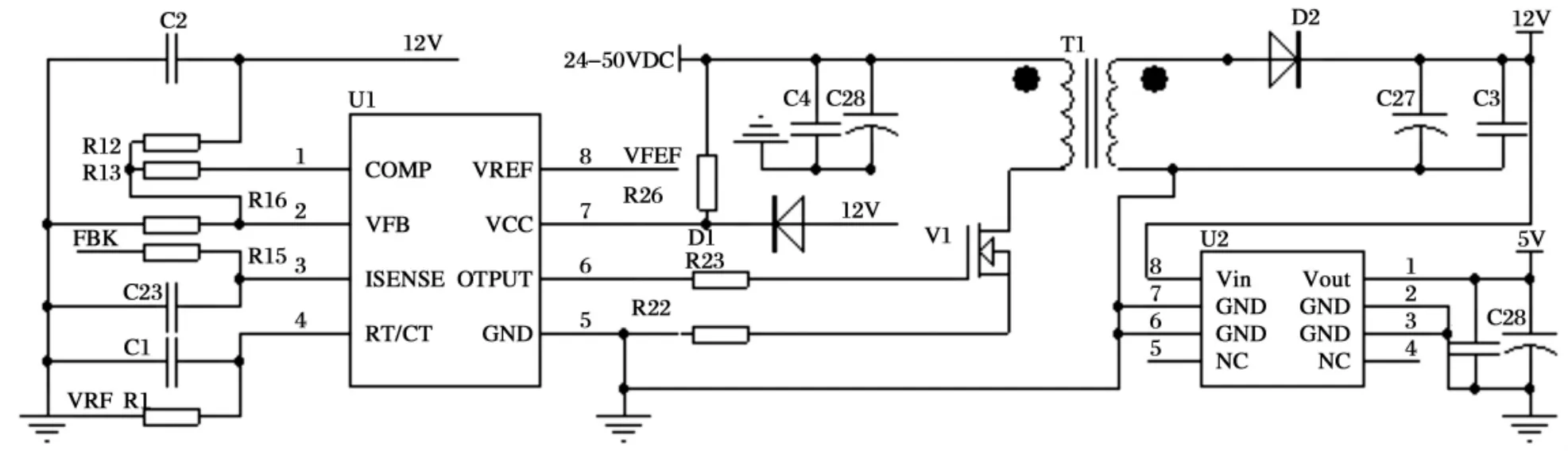
图5 系统电源电路设计

图6 转速为100RPM相电流波形

图7 8细分条件下100RPM细分效果图
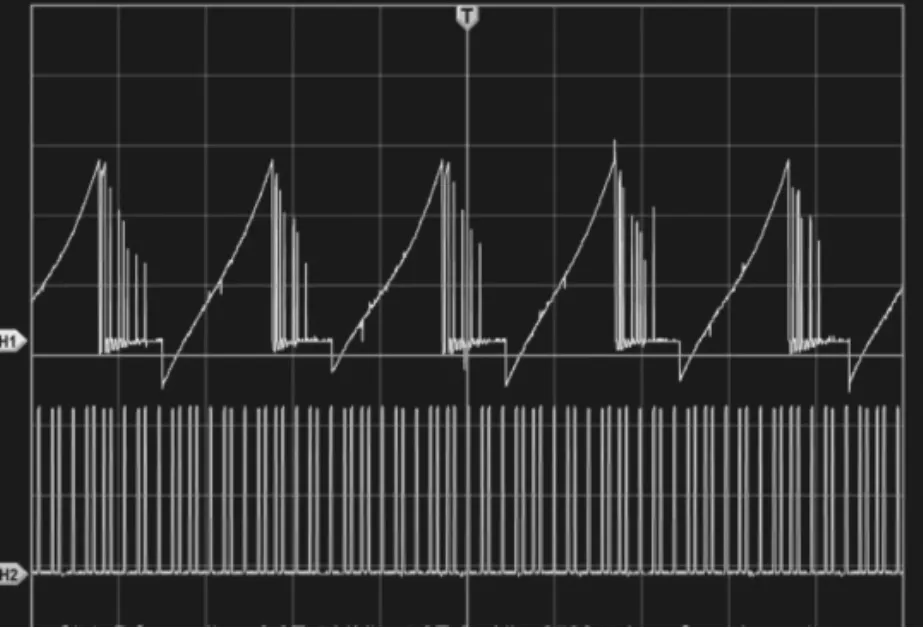
图8 电机转速为300RPM相电流波形
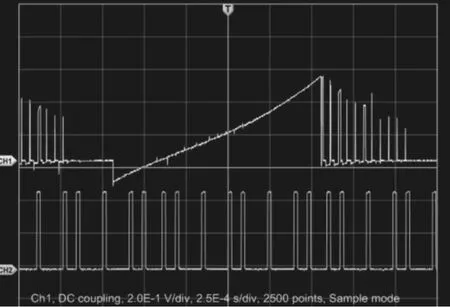
图9 8细分300RPM细分效果图
用所设计的细分驱动器和57BYGH633电机进行实验,观察电流波形与噪声。电机参数:步距角1.8,额定电流3A,工作电压20V~90V,绕组电阻1Ω,绕组电感1.6mH,静力矩13.5g/cm。
为了清楚观察起见,选择细分数为8,在不同转速下对空载下驱动器性能进行测试。100r/min转速时,在直流母线上并连两个采样电阻后测量电流波形如图6所示。相电流(通道1)具有明显的正弦特征,在指令脉冲信号(通道2)上升沿电流波形出现明显细分阶梯波(见图7)。转速增大,在300r/min下,电流波形接近尖顶波,平均值下降。这是由于阻感性绕组按指数规律上升缓慢,较短通电时间内,绕组电流跟不上细分控制信号,电流上升到一定值开始下降,绕组电流已无细分效果(见图8、图9)。进行正转一圈、反转一圈实验时,电机能实现精确的定位,运行数十个来回,停下来的位置与开始启动的位置几乎没有偏差。
[1]刘宝廷,程树康.步进电动机及其驱动系统[M].哈尔滨:哈尔滨工业大学出版社,1997:35-42.
[2]李秀红.高细分新型步进电机驱动系统设计[D].哈尔滨:哈尔滨工业大学硕士学位论文,2007.
[3]Murphree J,Brzezinski B.Using a Fixed-Point Digital Signal Processor as a PID Controller[J].American Society for Engineering Education,2002.
[4]王晓明,王玲.电动机的DSP控制:TI公司DSP应用[M].北京:北京航空航天大学出版社,2004:214-217.
(编辑:林钢)
Design of Micro-stepping Motor Driver Based on TC1002
LI Jun-ke
(School of IOT,Wuxi Vocational Institute of Commerce,Wuxi 214153,China.)
A subdivision driving system of step-motor is achieved based on TC1002.Corresponding external circuits around TC1002 internal function units are designed,and their respective performances were tested.The experiments show that the drive system bears such advantages as low frequency noise,high degree of division and high speed without step loss.
stepper motor;Subdivided driver;TC1002;Current decay control
TM 383.6
A
1671-4806(2016)06-0077-05
2016-09-10
江苏省高职院校青年教师企业实践培训项目资助
李军科(1972—),男,陕西宝鸡人,工程师,硕士,研究方向为电机控制。
