基于LiDAR点云的建筑物边界提取及规则化
2016-12-27赵小阳
赵小阳,孙 颖
(1. 广州市城市规划勘测设计研究院,广东 广州510060;2.中山大学 地理科学与规划学院,广东 广州510275)
基于LiDAR点云的建筑物边界提取及规则化
赵小阳1,孙 颖2
(1. 广州市城市规划勘测设计研究院,广东 广州510060;2.中山大学 地理科学与规划学院,广东 广州510275)

在无需定义主方向及建筑物形状的前提下,提出了一种适合于各种类型建筑的边界提取算法。首先利用凸包算法进行建筑物边界点的提取及排序,接着利用分组的Douglas-Peucker (D-P)算法进行边界特征点的提取,最后实现建筑物边界弧段部分的拟合。
LiDAR;点云;建筑物边界提取;规则化
城市作为时空信息的重要主体正发生着日新月异的变化,建筑物则是空间信息中最容易发生变化和需要更新的要素。快速提取建筑物和进行建筑物变化检测在GIS数据库更新、土地利用、数字化城市等诸多方面具有重要的作用[1]。其中,二维建筑物边界是其他应用的基础[2]。LiDAR技术的发展,给建筑物的边界提取带来了新的研究视角[3]。在利用LiDAR数据进行建筑物提取的研究中,有些采用内插的LiDAR数据,如栅格[4]、不规则三角网[5];而有些则利用单个激光点[6-7],能为后续的应用如边界提取、3D重建最大限度地保留点云原始信息。另外,目前多数基于LiDAR的边界提取方法需定义主方向或形状[5,8],事实上建筑物的形状各异,其边界线段与主方向的关系并非都是平行或垂直,且事先假定的形状并不能囊括现实中所有的建筑物形状。因此,研究适合于各种形状建筑物边界提取的方法非常必要。本文利用分类后的建筑物单点数据,在无需定义主方向和形状的前提下,提出了一种适合于各类建筑物的边界提取及规则化算法。
1 研究方法
针对分类后的建筑物点云,首先利用空间聚类算法进行每一栋建筑物的提取,并排除由遮挡引起的空白区域;然后利用凸包算法进行建筑物边界点的提取及排序,进而用分组的D-P算法进行边界特征点的提取;最后实现弧段部分的拟合,具体流程如图1所示。
1.1 边界点的提取及排序
在生成建筑物边界前,需对建筑物边界的激光点进行提取并排序,以建立相邻点间的拓扑关系。本文利用凸包算法[9]进行建筑物边界点的提取及排序,算法直接采用圆形邻域:
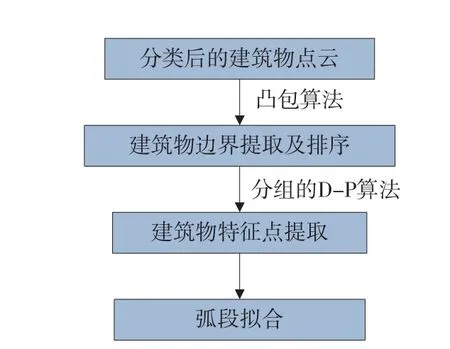
图1 本文建筑物边界提取流程图
1)选择X坐标最小的点作为初始点,y轴正向为起始方向。
2)以当前点为圆心,先以1倍栅格大小为半径,建立圆形邻域:①若邻域内有一点,该点为下一点;②若邻域有多点,则判断以前面两点连线为起算方向,当前点与邻域内各点连线间的顺时针夹角,夹角小为下一点;若角度相同则选择距离最近的点;③若邻域内无点,执行步骤3)。
3)计算当前点的2.5倍邻域:执行步骤2)中的①、②步。
实验表明,采用1倍、2.5倍双邻域的判别比单独采用2.5倍邻域提高了1倍的速度。图2为该栋建筑物执行排序的过程及最终结果,点位顺序采用折线相连的方式体现。
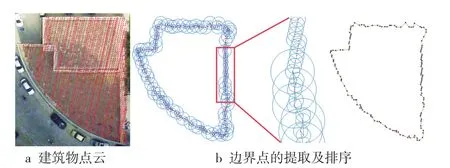
图2 建筑物边界点的排序
1.2 特征点提取
直接按顺序连接上述点得到的边界有严重锯齿现象。因而对边界点云进行简化,获取建筑物边界的特征点是非常必要的。D-P算法[10]是目前公认有效的线状要素简化算法,但建筑物是闭合面,无法直接使用D-P算法,因而本文选择了连续的n个点来使用D-P算法。实验选择了3、5、7个点进行测试,最终发现5 个点可以保证建筑物形状不被过度简化,同时避免了噪声点的影响,如图3a所示。经两次迭代后,房屋边界的特征点提取如图3b:红色点代表原始点云,蓝色三角代表特征点。
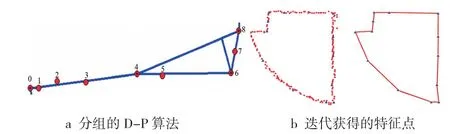
图3 分组D-P算法获得的特征点
1.3 建筑物边界规则化
实际中有些建筑物的边界是弧段。为接近建筑物真实形状,本文利用相邻直线段的关系将其拟合为弧段。根据解析几何知识:图4中相邻3条线段L1、L2、L3在满足一定条件的基础上可拟合为一个弧段。
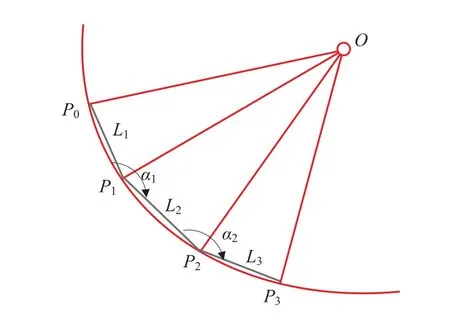
图4 圆上相邻弧段与弦夹角的关系
图4中a1为弦L1和L2的夹角,a2为弦L2和L3的夹角,圆内两弦与半径以及弦与夹角之间满足如下关系:

若|R1-R2|/(R1+R2)/2≤δR,则上述3条相邻直线段可拟合为圆弧。
2 实验结果及精度分析
2.1 实验数据
采用了2个区域(以下称为A区域和B区域)经过分类后的建筑物点云数据,如图5所示。实验区域的建筑物形状各异,有凹的、凸的、矩形的、带有弧段的以及岛状结构的等。
2.2 实验结果及分析
实验结果表明,在未判断主方向的情况下,采用本文方法提取的矩形建筑物边界探测结果很好,且对于有弧段的建筑物,将其拟合为弧段更加逼近了建筑物的真实形状。为进一步说明该方法的有效性,将实验结果与参考数据进行叠加,如图6所示,除因点云分类引起的建筑物合并或分离外,多数的提取结果较为理想。
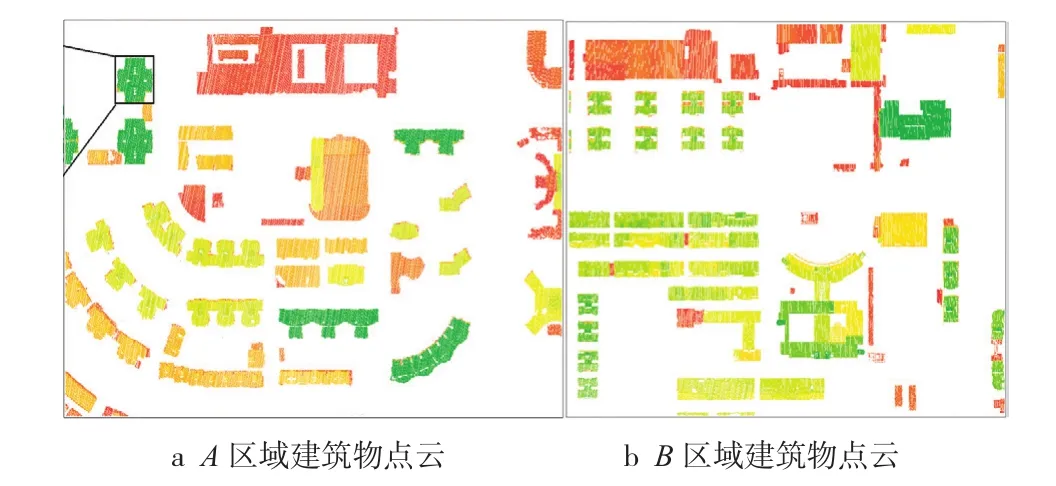
图5 建筑物点云和建筑物边界探测结果
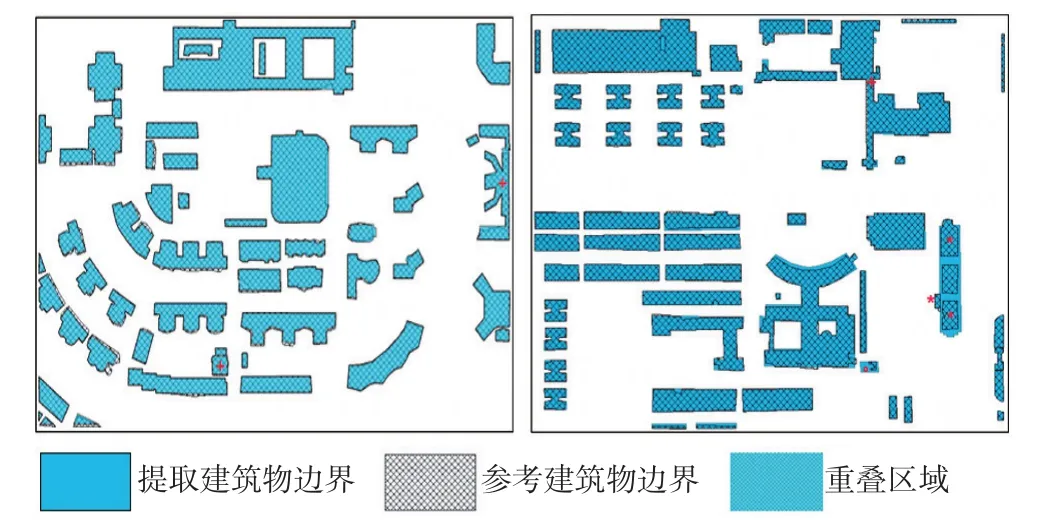
图6 建筑物边界提取结果与参考边界的叠加
2.3 精度评价
为定量分析本文方法的精度,采用文献[4]的评价策略进行了定量评估,评价因子为:
1)匹配度因子:选用土地利用分类评估参数Completeness(Comp)、Correctness(Corr)和Quality(Q)。
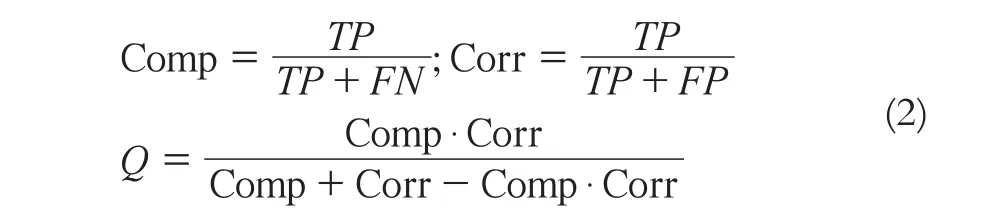
式中,TP为同属于提取和参考数据的区域;FP为属于提取数据的区域;FN为属于参考数据的区域。
2)位置精度因子:选用参考数据与提取结果中建筑物中心点的距离差(Dd)。

式中,Xe、Ye为提取建筑物中心的坐标;Xr、Yr为参考建筑物中心的坐标。
表1显示了A、B两个区域的提取精度。单个建筑物的提取结果显示了提取结果与参考数据较高的匹配度和位置精度;在整个区域的结果中,由于采用了较高的重叠度阈值To=90%,故得到了略低的精度,若取一般常用的70%重叠度,精度则会大大提高。图7显示了A、B两区域中的Dd值,大多数建筑物显示了较小的中心点差异,其中几个超大值是由图6中标注的建筑物分类错误引起的。以上各因子均表明本文方法在利用LiDAR点云进行建筑物边界提取时可以取得较好的效果。
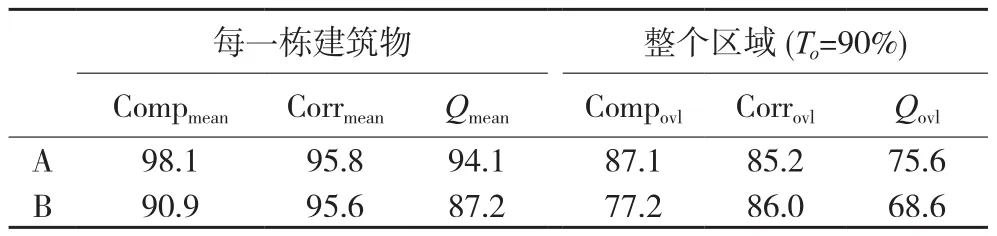
表 1 A、B两区域的建筑物边界提取精度/%
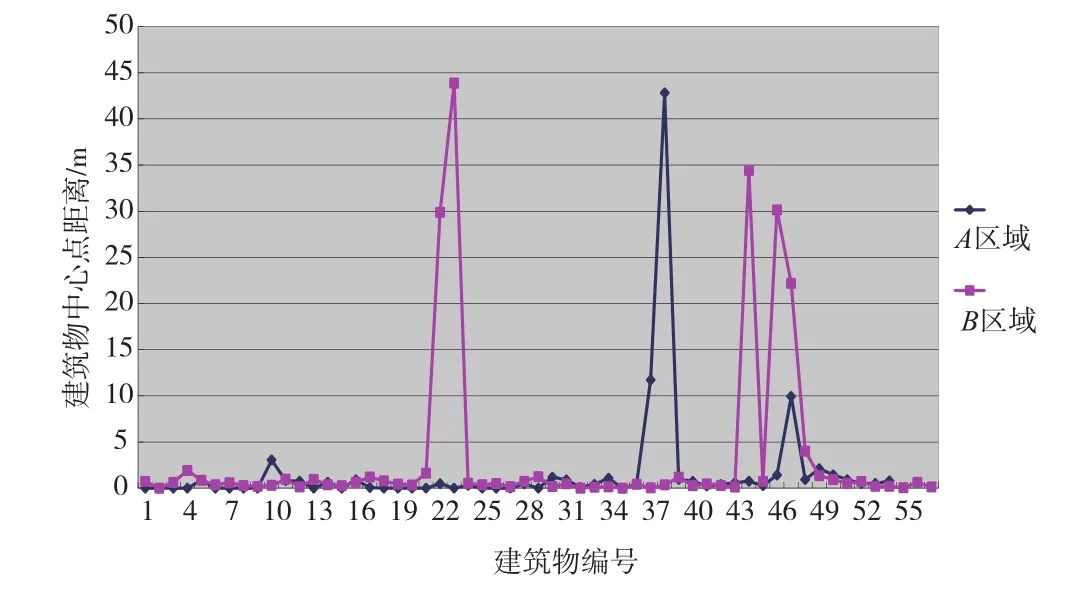
图7 提取建筑物与参考建筑物中心点差距
3 结 语
本文提出了一种从分类后的建筑物点云中提取建筑物二维边界的方法,包括建筑边界点云提取及排序、建筑物边界特征点提取和弧段拟合3个步骤。该方法无需假设建筑物主方向和形状,并且适用于任意形状的建筑物。建筑物边界点云排序利用凸包算法,采用双邻域搜索,提高了排序速度;同时对弧段进行拟合,使建筑物边界更贴合实际边界,克服了LiDAR点云转换为建筑物的锯齿现象。
[1] Ozcan A H, Unsalan C, Reinartz P. A Probabilistic Approach to Building Change Detection[C]. 22nd Signal Processing and Communications Applications Conference (SIU), Trabzon,2014
[2] Sportouche H, Tupin F, Denise L. A Symmetric Scheme for Building Reconstruction from a Couple of HR Optical and SAR Data[C]. 2011 Joint Urban Remote Sensing Event (JURSE), Munich,2011
[3] Rutzinger M, Rottensteiner F, Pfeifer N. A Comparison of Evaluation Techniques for Building Extraction from Airborne Laser Scanning[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2009,2(1):11-20
[4] 孙颖,张新长,罗国玮.从LiDAR点云提取建筑物边界的活动轮廓模型改进方法[J].测绘学报,2014,43(6):620-626
[5] Seo S, Lee J, Kim Y. Extraction of Boundaries of Rooftop Fenced Buildings from Airborne Laser Scanning Data Using Rectangle Models[J].Geoscience and Remote Sensing Letters,2014,11(2):404-408
[6] Lee J, Han S, Byun Y, et al. Extraction and Regularization of Various Building Boundaries with Complex Shapes Utilizing Distribution Characteristics of Airborne LiDAR Points[J].ETRI Journal,2011,33(4):547-557
[7] 董保根.机载LiDAR点云与遥感影像融合的地物分类技术研究[D].郑州:信息工程大学, 2013
[8] Awrangjeb M, Ravanbakhsh M, Fraser C. Automatic Detection of Residential Buildings Using LiDAR Data and Multispectral Imagery[J].ISPRS Journal of Photogrammetry and Remote Sensing,2010,65(5):457-467
[9] Jarvis R A. On the Identification of the Convex Hull of a Finite Set of Points in the Plane[J].Information Processing Letters,1973,2(1):18-21
[10] Douglas D H, Peucker T K. Algorithms for the Reduction of the Number of Points Required to Represent a Digitized Line or Its Caricature[J].Cartographica:the International Journal for Geographic Information and Geovisualization,1973,10(2):112-122
P23
B
1672-4623(2016)07-0088-03
10.3969/j.issn.1672-4623.2016.07.028
赵小阳,高级工程师,注册测绘师,主要研究方向为精密工程测量、城市测量和LiDAR数据处理。
2015-11-10。
项目来源:国家自然科学基金重点项目资助项目(41431178)。
