适应于离散系统的无刷直流电机的建模与仿真
2016-12-26钱伟康
钱伟康,洪 晨,郭 论
(上海理工大学 光电信息与计算机工程学院,上海 200093)
适应于离散系统的无刷直流电机的建模与仿真
钱伟康,洪 晨,郭 论
(上海理工大学 光电信息与计算机工程学院,上海 200093)
针对离散系统有感无刷直流电机模型搭建问题,根据数字逻辑关系与数学公式构建了霍尔传感器模型与电机模型,利用Simulink工具将传感器模型应用于无刷直流电机模型中,构建了无刷直流电机的离散仿真系统。仿真结果验证了电机模型的可行性,为研究电机离散控制系统提供了一个可靠的方案。
无刷直流电机;霍尔传感器;仿真
无刷直流电机(BLDC)是在有刷电机的基础上发展而来,但有别于有刷电机,其没有换向器与电刷,减少了机械磨损。因此,无刷直流电机的寿命比有刷电机的寿命长,运行可靠方便。
本文根据无刷直流电机的工作原理,搭建了霍尔传感器、电机本体模型并将电机模型在离散系统中进行仿真,验证该模型的可靠性。
1 无刷直流电机控制系统
无刷直流电机的工作原理,如图1所示。
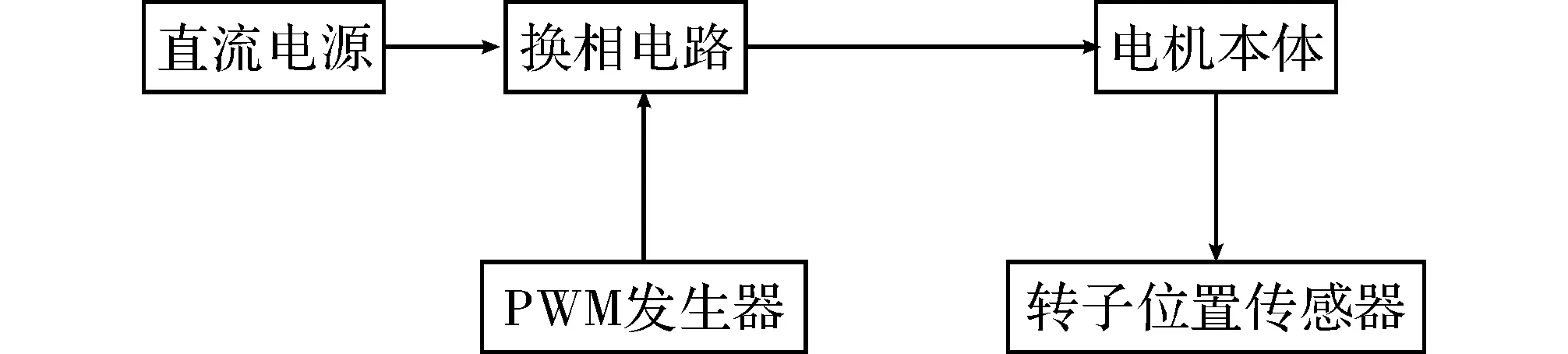
图1 无刷直流电机的工作原理图
无刷直流电机主要由电动机本体、位置传感器以及电子换相线路3部分组成。根据图1的工作原理,要使无刷直流电机转动起来,需要根据转子位置传感器的输出信号确定转子位置,然后通过电子换相线路去驱动电机本体使电枢绕组依次馈电,从而在定子上产生旋转的磁场,驱动永磁转子转动[1]。
1.1 霍尔传感器
无刷直流电机没有电刷与换向器,取而代之的就是位置传感器,其在电机中测定转子磁极位置,为逻辑开关电路提供正确的换相信息,即将转子磁钢磁极的位置信号转换成电信号,然后去控制定子绕组换相,从而使转子转动[2]。在有感无刷直流电机中,位置传感器一般选用霍尔传感器,根据霍尔元件的霍尔效应,当转子磁极N、S转过霍尔元件时,霍尔传感器输出高低电压,再根据霍尔传感器的输出可判断出转子位置,从而判断何时换相。
一般有感无刷直流电机的定子上装有3个霍尔传感器,3个霍尔传感器的输出波形相差120°电角度,输出信号中高、低电平各占180°电角度。
1.2 电机本体数学模型
以两相导通星型三相六状态的电机模型为例,为简化电机的数学模型,不妨假设:(1)定子三相绕组是完全对称的,空间互差120°电角度,参数相同;(2)不计电枢反应,气隙磁场分布近似认为是平项,且宽度为120°电角度的梯形波;(3)忽略齿槽效应,电枢导体连续均匀分布于电枢表面;(4)驱动系统逆变电路的功率管和续流二极管均具有理想的开关特性;(5)忽略电机铁心饱和,不计涡流损耗和磁滞损耗等。
由于直流无刷电机在运行的过程中,通过每相绕组的电流不是持续不变的,故由该电流和转子共同作用所产生的转矩,以及各相绕组上的感应电势也都不是持续不变的,所以定子相绕组的自感L和互感M均为常数,这样三相绕组的电压平衡方程可表示为[5]
(1)
式中,Ua、Ub、Uc为电机每相绕组的相电压;Ia、Ib、Ic为电机每相绕组的相电流;Ea、Eb、Ec为电机每相绕组产生的反电动势;R为每相绕组的电阻;L为每相绕组的电感;M为各相绕组之间的互感。
当三相绕组为星型连接时,有
Ia+Ib+Ic=0
(2)
在式(2)左右两端同乘互感M,得
MIa+MIb+MIc=0
(3)
将式(2)、式(3)带入式(1)中,得
(4)
理想情况下,当某一相不通电时,该相电压为0,但在实际系统中,换相时电流变化跟不上功率管开关管的变化,此时就会产生一定的滞后电流,使得该绕组中还残余电压,从而产生中点电压Un,其方程为
(5)
气隙磁场中,导体的感应电势为
E=Keω
(6)
其中,Ke为反电动势系数。
无刷直流电机的电磁转矩方程
(7)
无刷直流电机的运动方程
(8)
式中,Te为电磁转矩;Tl为负载转矩;B为阻尼系数;J为电动机转动惯量;ω为电机机械转动角速度。
2 基于Simulink的电机模型
2.1 霍尔传感器建模
霍尔传感器的仿真模型如图2所示,这里主要是以极对数p和电机转速n为模型的输入,以3个霍尔元件的感应的高低电平为输出,根据输入转速的正负确定电机正转与反转。
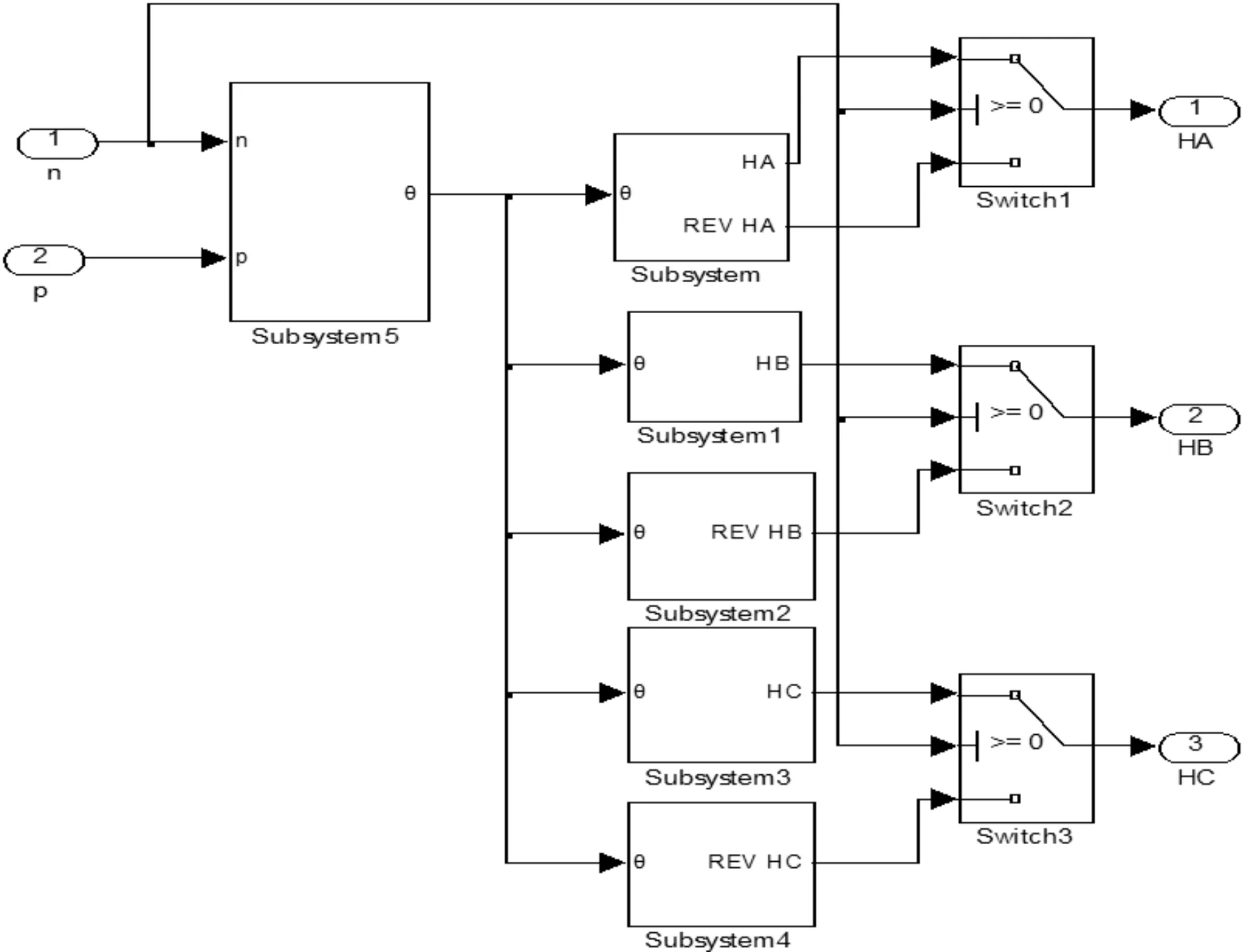
图2 霍尔传感器模型
2.2 电机本体模型
无刷直流电机的本体模型主要是由电压方程、电磁转矩方程、运动方程组成,由上述数学模型可搭建各个模块的模型。电压方程模块、电磁转矩模块以及运动方程模块可根据数学方程直接搭建,运动方程中的连续积分模块需要改为离散积分模块,反电动势的模型搭建可结合Look-up Table生成,如图3所示,为建立的无刷直流电机本体模型。
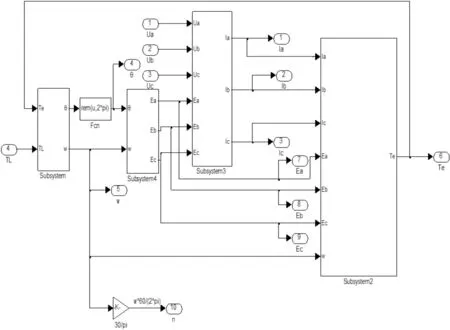
图3 电机本体模型
3 仿真结果
利用Matlab/Simulink将图2霍尔传感器模型进行仿真验证,设定极对数p=2,转速n=1 000 r/m,图4与图5分别是电机正转与反转情况下的输出波形。
根据
(9)
计算出霍尔传感器的输出周期T=0.03 s,根据仿真结果显示,霍尔传感器输出周期的时间与计算的理论值一致,可验证霍尔传感器模型的正确性。
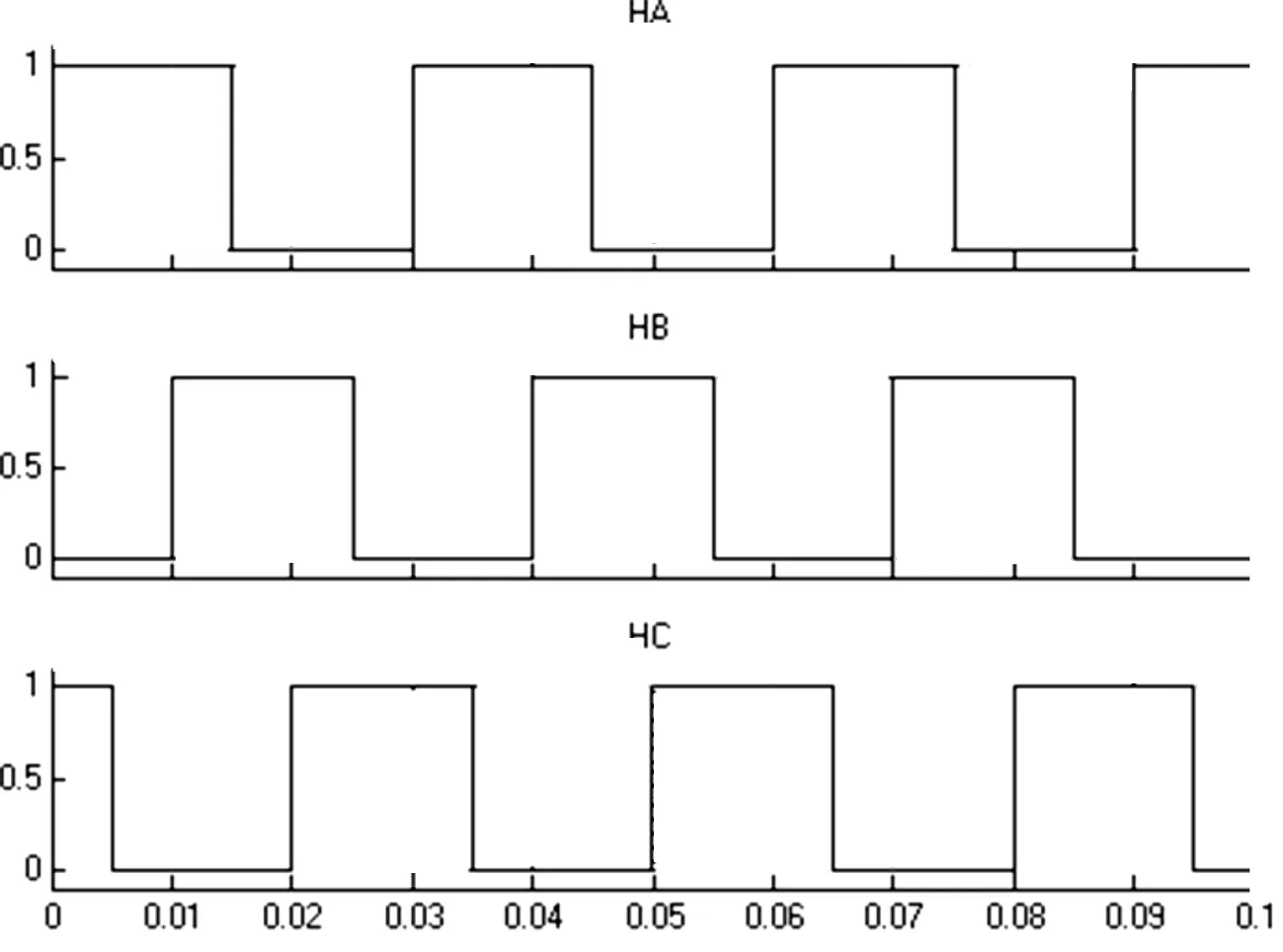
图4 霍尔传感器正转输出波形
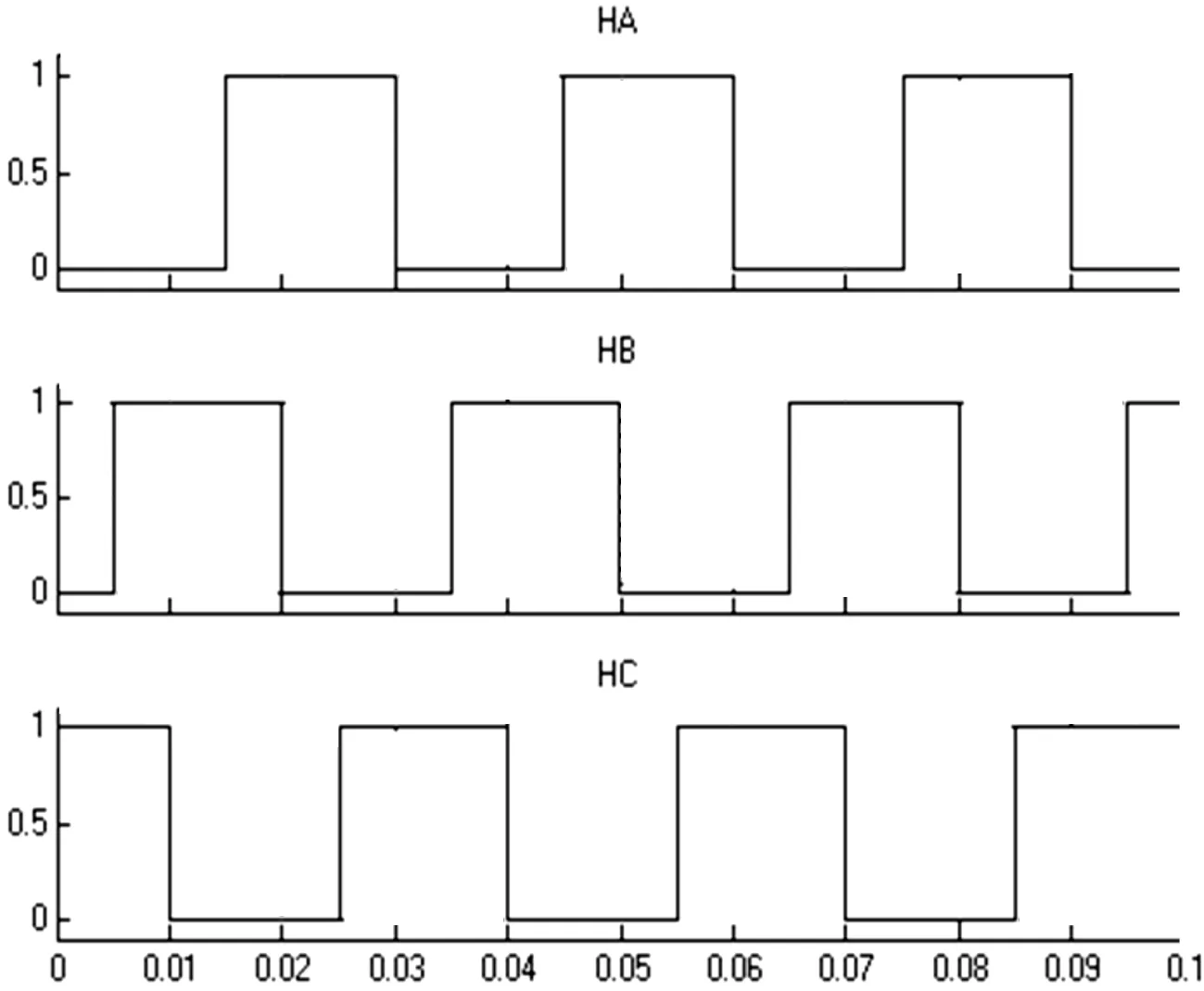
图5 霍尔传感器反转输出波形
根据图1的工作原理所建立的无刷直流电机工作模型如图6所示,无刷直流电机里的电机参数为:电压310 V,绕组电阻R=2.875 Ω;自感L=8.5e-3 H;互感M=0 H;阻尼系数B=0.001 N·m·s/rad;转动惯量J=0.000 8 N·m2;反电动势常数Ke=0.146 607 7 V·s/rad;极对数p=4; PWM斩波频率10 kHz,占空比为0.5,Simulink仿真步长10e-6,仿真时间为0.2 s,在0.1 s之前空载仿真,0.1 s时加入负载力矩Tl=5 N·m。图7是正转情况下,经过换相逻辑模块控制逆变器后输出波形,即为电机输入电压,图8是A相电流输出波形以及反三相电动势输出波形,根据换相逻辑对应,图9是角位移、角速度ω、电磁转矩Te以及机械转速n的仿真结果,从仿真结果可看出,在0.1 s时加入了负载转矩Tl,转速与电磁转矩也相应地发生了改变,仿真结果与理论结果基本一致。
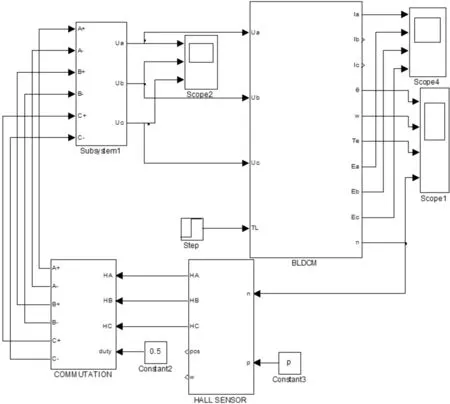
图6 电机工作模型系统

图7 三相绕组输入电压
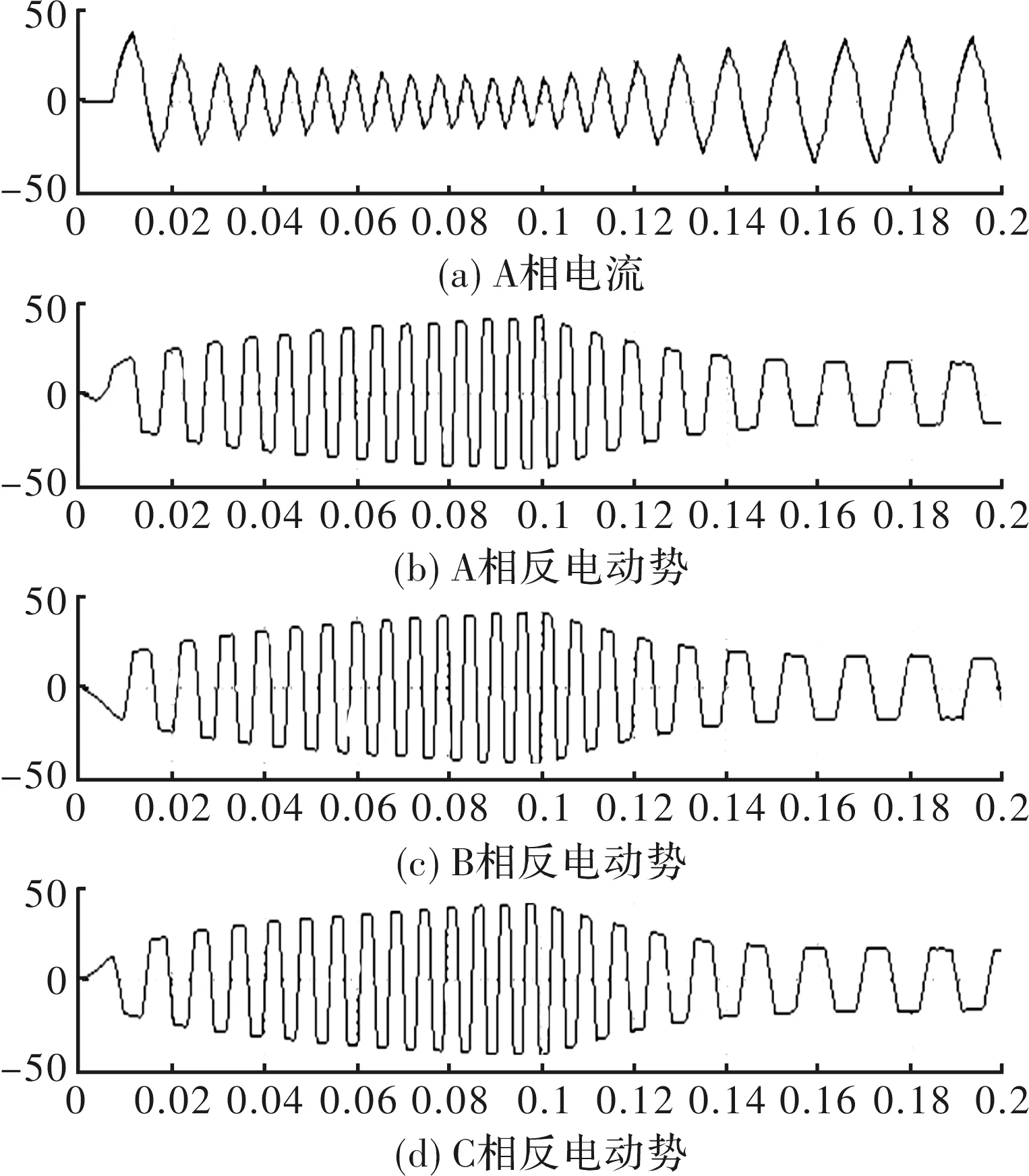
图8 相电流与反电动势
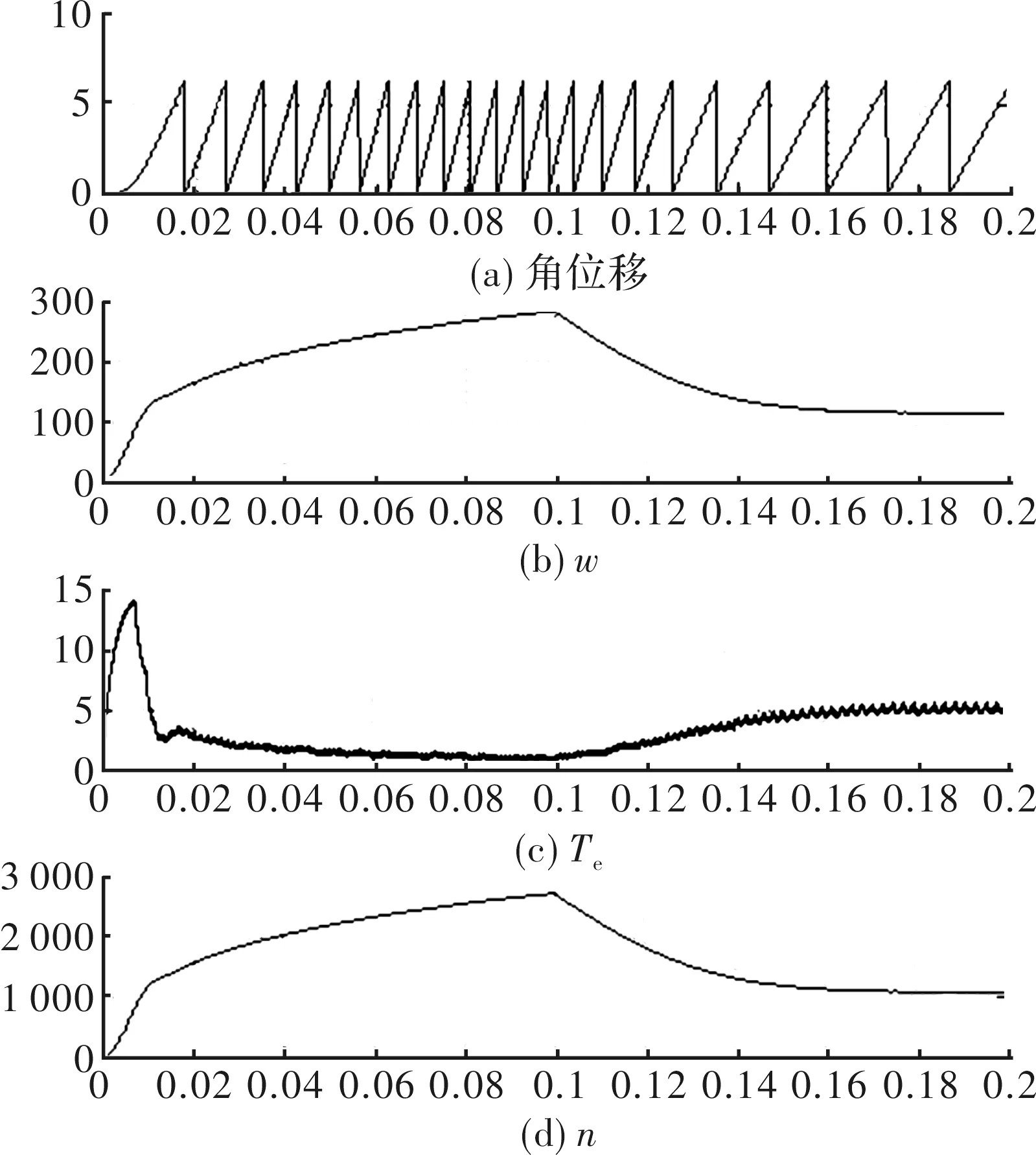
图9 角位移、角转速、转矩、转速
4 结束语
本文分析了霍尔传感器在无刷直流电机内的工作原理,用Simulink搭建了霍尔传感器的模型并仿真,支持正反转与多对极,且将搭建的传感器模型应用于无刷直流电机中,构建了无刷直流电机的新模型。仿真结果与理论分析基本一致,验证了模型系统的可靠性。在不使用Matlab中SimPowerSystems同步电机模型的情况下,直接可将数学模型搭建的电机模型与霍尔传感器模型有效结合,为研究无刷直流电机控制系统提供了一个新的设计手段。
[1] 李家庆,李芳,叶文.无刷直流电机控制应用:基于STM8S系列单片机[J].北京:北京航空航天大学出版社,2014.
[2] 张琛.直流无刷电动机原理及应用[M].北京:机械工业出版社,1995.
[3] 朱剑波.无刷直流电机控制系统的仿真与分析[J].国外电子测量技术,2013,32(12):25-30.
[4] 方炜,张辉,刘晓东.无刷直流电机双闭环控制系统的设计[J].电源学报,2014(2):35-42.
[5] 周永昌,黄植功.基于Matlab的无刷直流电机双闭环控制系统建模与仿真[J].广西物理,2012,33(1):25-29.
[6] 方炜,张辉,刘晓东.无刷直流电机双闭环控制系统的设计[J].电源学报,2014(2):35-42.
[7] 朱向东,呼延霄,刘轶,等.基于Matlab/dSPACE的无刷直流电机双闭环控制实时仿真[J].火箭推进,2015,41(1):117-122.
[8] 谢少华,瞿遂春.基于Matlab的无刷直流电机控制系统仿真研究[J].新型工业化,2015(3):28-34.
[9] 张立,李莉.基于Matlab的无刷直流电机控制系统建模与仿真[J].机电工程技术,2010,39(4):29-31.
Modeling and Simulation of the Brushless DC Motor for the Discrete System
QIAN Weikang,HONG Chen,GUO Lun
(School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology, Shanghai 200093, China)
This paper is mainly in the problem of building the Brushless DC Motor model in the digital system, according to the digital logic relations and the mathematical formula constructs the hall sensor model and the motor model, and the Hall sensor model is used in the brushless DC motor model with the tool of Simulink, they constructed the discrete simulation system of the Brushless DC motor. The simulation results verify the feasibility of the motor model, and it provides a reliable solution of the discrete motor control system.
brushless DC motor; holzer sensor; simulation
10.16180/j.cnki.issn1007-7820.2016.12.033
2016- 02- 23
钱伟康(1957-),男,副教授。研究方向:电子信息科学与技术等。洪晨(1991-),女,硕士研究生。研究方向:电机建模与电机控制。
TM33
A
1007-7820(2016)12-118-04
