基于RFID的WSN质心定位算法研究
2016-12-26杨勇明
杨勇明
(上海理工大学 公共实验中心,上海 200093)
基于RFID的WSN质心定位算法研究
杨勇明
(上海理工大学 公共实验中心,上海 200093)
针对GPS在室内定位精度较低的问题,提出一种基于RFID的WSN质心定位算法,以WSN定位信息场为基础,采用RFID标签定位信息关联数据库,实现目标物体的房间级定位和精确定位。实验结果表明,基于RFID的WSN质心定位算法具有定位精度高,环境适应能力强等优点,可用于室内定位等领域。
RFID;WSN质心定位;定位信息场;关联数据库
RFID(Radio Frequency Identification)是一种具有非视距,非接触,双向数据传输的自动识别技术[1-3],其工作范围广、存储容量大、穿透力较强、可重复使用,能实现多标签防碰撞识别等优点,是室内定位技术的研究前沿,已广泛应用于资产管理和物流追踪等领域。本文在对传统质心定位算法进行研究的基础上,提出了基于RFID的WSN(Wireless Sensor Networks)质心定位算法,以一定规律分布的RFID标签节点和装载有RFID阅读器的目标物体为实验平台,阅读器读取标签定位信息,且传送到上位机软件系统,上位机软件系根据WSN质心定位算法,采用标签定位信息关联数据库,确定目标物体的实时位置。
1 定位系统
如图1所示,基于RFID的WSN定位系统由RFID阅读器、RFID标签节点、上位机软件系统3部分组成,其工作原理[4-6]:工作状态下的RFID阅读器通过天线发送RFID载波信号,若RFID标签节点进入阅读器的识别范围时,接收阅读器传送的载波信号,且解调载波信号,然后按照阅读器发送的相关指令,将标签内存储信息产生调制的载波信号,通过标签天线传送给阅读器,阅读器接收载波信号,解调载波信号后及时传输到上位机软件系统,系统进行相应数据处理后,做出正确的决策,从而控制目标物体完成相应任务。
2 距离—RSSI函数关系
基于接收信号强度(Received Signal Strength Indication,RSSI)的定位技术已经得到了广泛应用:文献[7~10]中假设实验环境为空旷空间,并将系统误差假设成均值为0,标准差为σ的高斯变量,这样可简化问题的复杂性,但随着环境噪音的增大,定位误差会急剧上升;文献[11]使用了卡尔曼滤波对RSSI进行滤波,取得了较好的效果,但在RSSI发生跃变时(实际RSSI变化>5 dBm),再次收敛的速度会较慢。
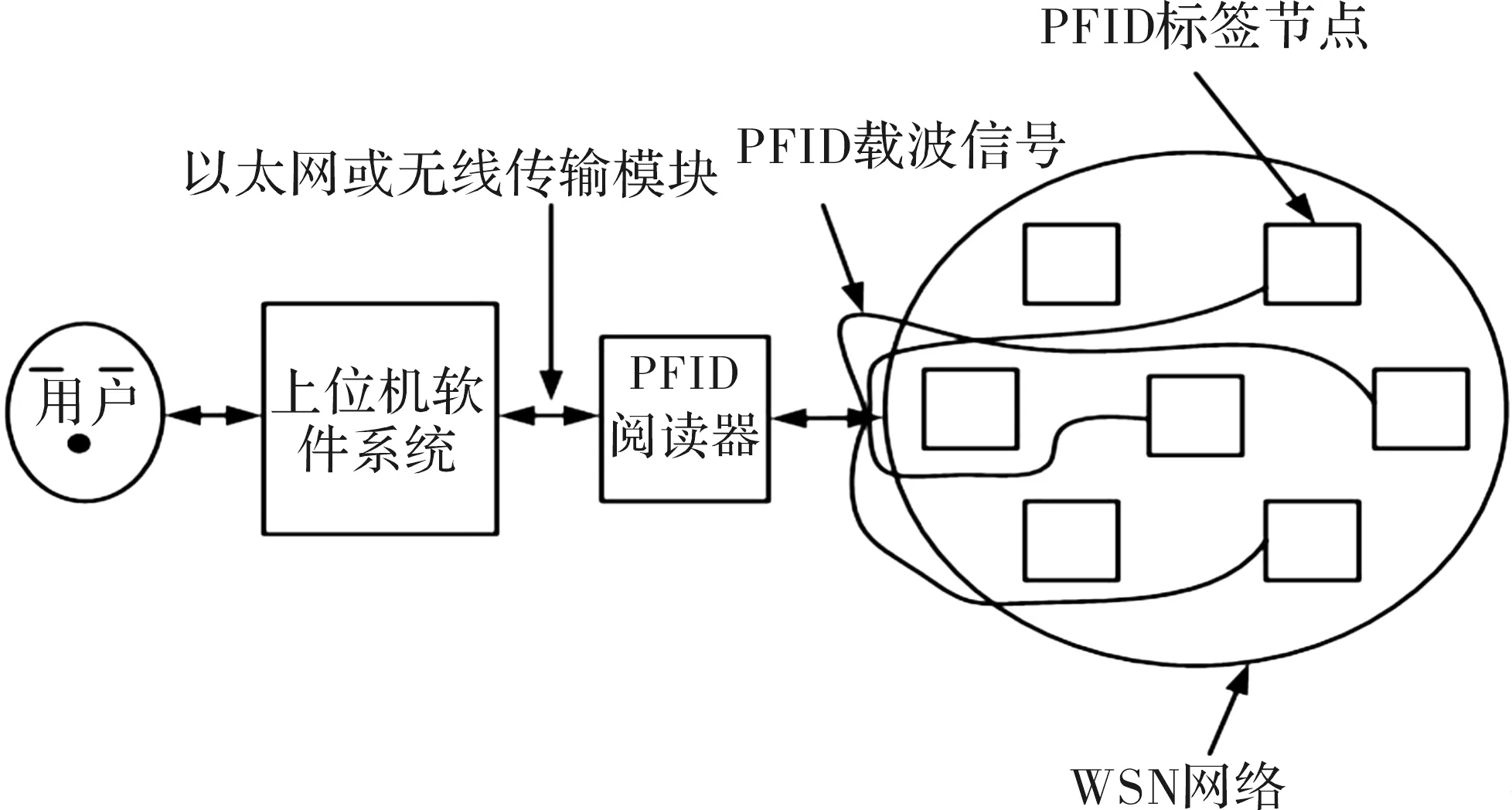
图1 基于RFID的WSN定位系统
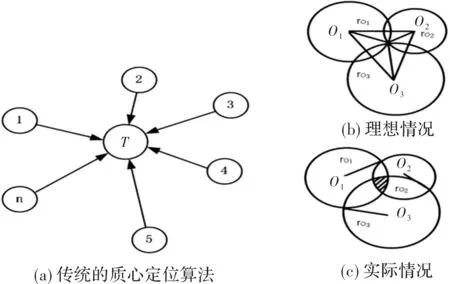
图2 传统质心定位算法
本文提出基于RFID的WSN质心定位算法是针对复杂的室内环境,RFID载波信号易受到绕射、折射和散射等因素的影响,所以选择对数常态模型较为合适[12-15],根据式(1)对数常态传输损耗模型得到距离—RSSI函数关系
(1)
式中,PL(d)是距离RFID阅读器d(m)处标签的RSSI值;PL(d0)是距离RFID阅读器d0(m)处标签的RSSI均值;n∈[-2,-5]是信号衰减因子,与障碍物分布及其材料有关;Xσ是系统误差,常用均值为0,标准差为σ∈[4,10]的高斯变量表示,本文取值为0;d0表示RFID阅读器与RFID标签间的参考距离,通常取值1m;d表示RFID阅读器与RFID标签间的实时距离。
3 基于RFID的WSN质心定位算法
3.1 传统的质心定位算法
图2(a)所示传统质心定位算法[16-17],设已知节点的坐标为(X1,Y1), (X2,Y2),…, (Xn,Yn),那么未知节点的坐标可以根据式(2)计算;如图2(b)、图2(c)所示,选用已知节点的不合理性,会降低未知节点的定位精度,因未知节点的定位结果不是质心,而是一个公共区域,所以必须研究改进的质心定位算法,从而提高定位精度[18-19]。
(2)
3.2 WSN质心定位算法
图3所示基于RFID的WSN定位信息场[20-21],特征参数可根据实验环境进行设计,形状也可根据实际需求灵活扩展,当RFID标签节点分布密度改变时,无需更改标签内部存储信息,也不需要更改WSN定位信息场的特征参数,当RFID阅读器读取标签信息,通过以太网传送到上位机软件系统后,系统采用图4所示基于RFID的WSN质心定位算法,根据图5所示定位算法流程图,完成对目标物体的实时定位。
(1) WSN定位信息场。基于RFID的WSN定位信息场包括房间定位栅格和精确定位栅格两部分,其中精确定位栅格的长和宽分别为L1和W1;R代表房间定位栅格所在列;S代表房间定位栅格所在行;P代表精确定位栅格所在列;Q代表精确定位栅格所在行。WSN定位信息场由均匀分布的(R×S)只房间定位栅格构成,每只房间定位栅格由均匀分布的(P×Q)只精确定位栅格组成;RFID标签节点的房间定位由(R,S)确定,精确定位由 确定。RFID标签节点的存储信息包括:R、S、P、Q、RSSI、有无障碍物、障碍物前、后、左、右通行情况、停靠和仓库等信息,其中R、S、P、Q是标签的唯一识别码,代表房间位置; 代表阅读器与标签节点之间的实时距离,根据式(2)计算;有无障碍物、障碍物前、后、左、右通行情况、停靠和仓库等代表辅助定位信息。图3中R=2,S=3,P=1,Q=1,1,0,0,1,1,P=1,S=0表示该RFID标签节点位于第2列和第3行交叉的Room 8房间定位栅格中,同时处于该房间定位栅格中第1列和第1行交叉的精确定位栅格处,四周有障碍物,前、后两个方向不可通行,左、右两个方向可以通行,且该标签处于停靠检修点房间,不在仓库房间。
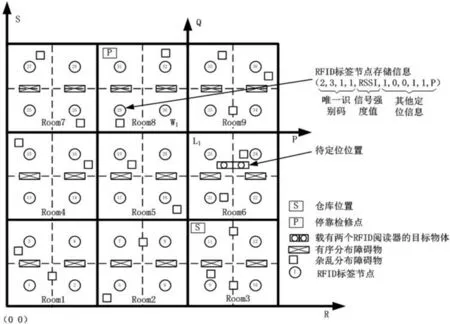
图3 基于RFID的WSN定位信息场
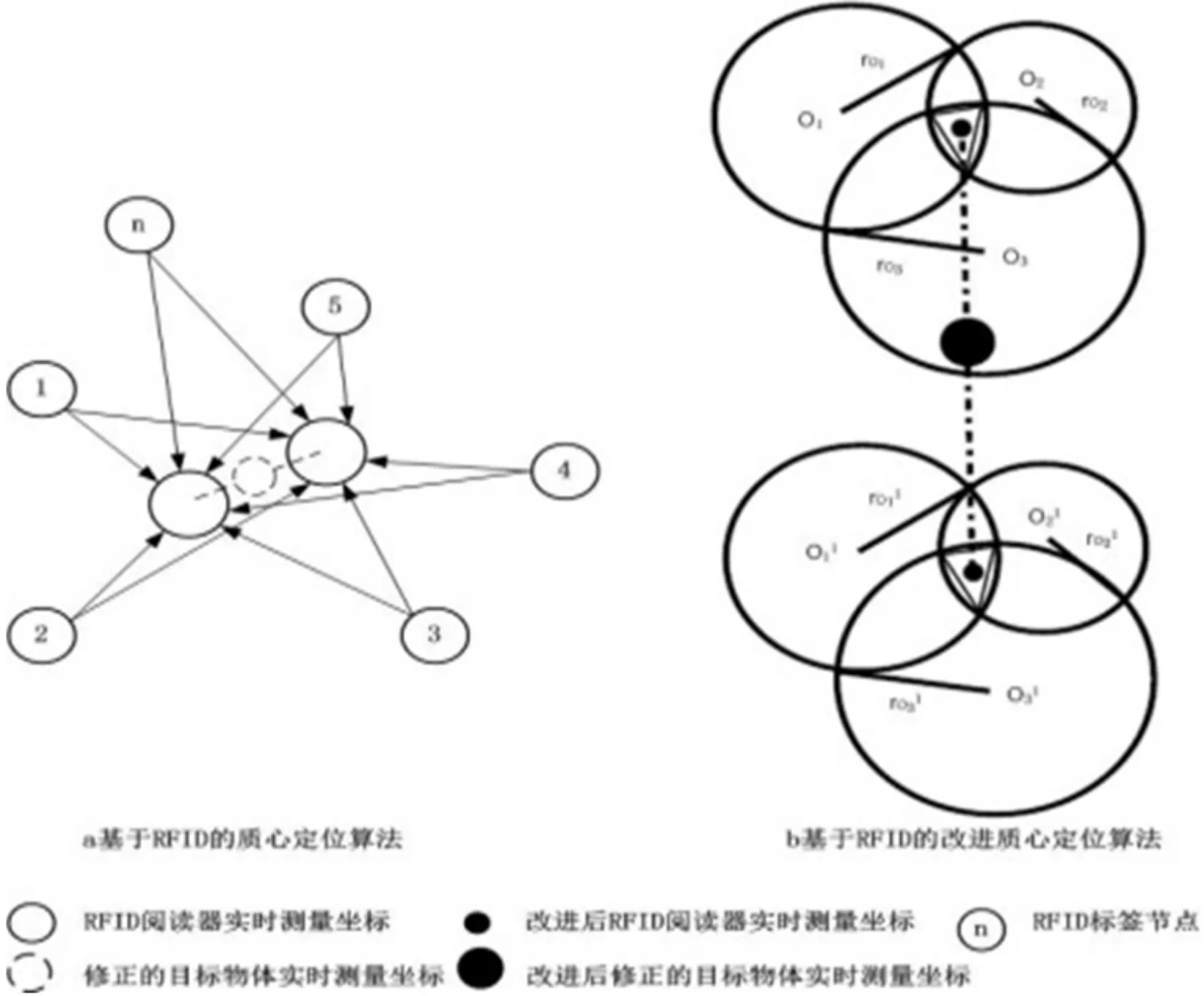
图4 基于RFID的WSN质心定位算法
(2)定位算法工作原理。图3中,两个RFID阅读器安装在目标物体中央位置,分别设为 ReaderI和ReaderII,ReaderI的测量坐标为(RⅠx,RⅠy),ReaderII的测量坐标为RⅡx,RⅡy,则ReaderI和ReaderII的实时测量坐标平均值即为目标物体实时坐标:
1)识别标签。两个RFID阅读器分别读取其识别范围内的RFID标签节点,读取包括房间定位信息(R,S),精确定位信息(P,Q),RSSI信息,有无障碍物以及障碍物前、后、左、右同行情况、停靠检修点和仓库位置等信息;
2)传送信息。阅读器ReaderI和ReaderII识别标签节点信息后,以Ri,Si,Pi,Qi,RSSIi…(i=1,2,3,4)数据包的形式经过以太网传送到上位机软件系统;
3)计算标签节点实际坐标。上位机软件系统接收标签节点信息后,根据式(3)计算标签节点实际坐标(TIx,TIy)
(3)
4)根据WSN质心定位算法计算阅读器测量坐标。上位机软件系统接收到标签节点信息后,根据式(1),将RSSI转化为距离rI1、rI2、rI3、rI4和rII1、rII2、rII3、rII4,依据距离越近,对定位影响越大的原则,选择3个最佳定位标签,以这些定位标签为圆心,对应的RSSI距离为半径画圆,着重对这些圆相交的公共区域进行研究,利用表1,选择ReaderI识别标签对应三角形顶点坐标(XIA1,YIA1) 、(XIA2,YIA2)、(XIA3,YIA3),ReaderII识别标签对应三角形顶点坐标(XIIA1,YIIA1) 、(XIIA2,YIIA2) 、(XIIA3,YIIA3) ,根据式(4)计算ReaderI测量坐标(RIx,RIy) 和ReaderII测量坐标(RIIx,RIIy)
(4)
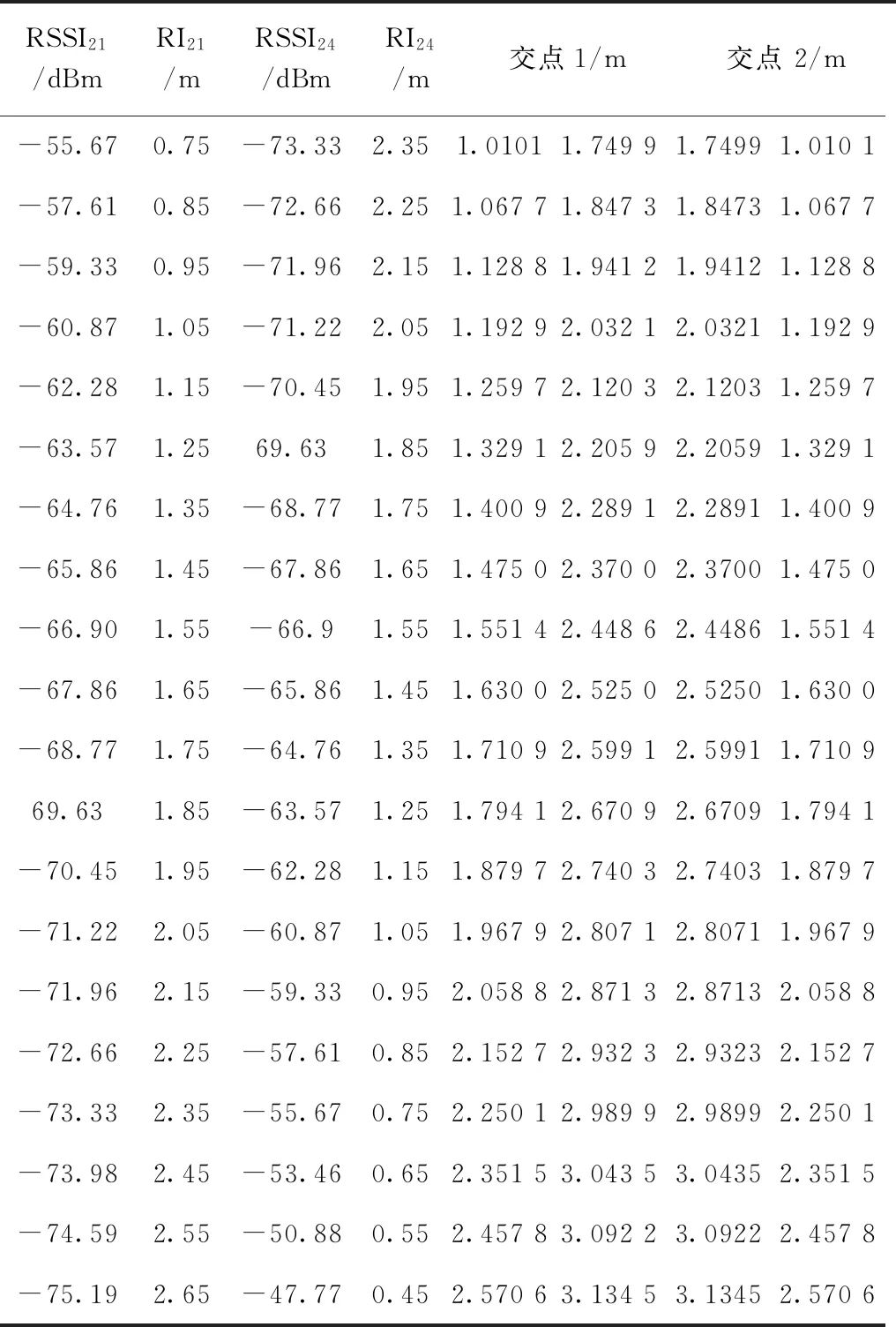
表1 RSSI-半径-圆交点关联数据库
5)计算目标物体测量坐标。根据式(5)计算目标物体测量坐标(Rx,Ry)
(5)
6)确定目标物体房间位置。根据第(4)步选择的3个最佳定位标签,利用表2确定目标物体所在房间位置。
4 实例验证
4.1 实验环境
实验环境选择上海理工大学机械工程学院一楼实验室,实验仪器采用上海网频电子科技有限公司的通用型RFID阅读器和有源标签,设备通讯距离最远50 m,圆极化全向性天线,识别速率100只标签/s,具备200只标签无碰撞读取的能力,可直接输出RSSI,适用于本文提出的基于RFID的WSN质心定位系统。
4.2 上位机软件
参照图5所示的定位算法流程图,编写了图6所示的基于VB 6. 0的WSN质心定位算法上位机软件,可实现目标物体的实时定位等功能。
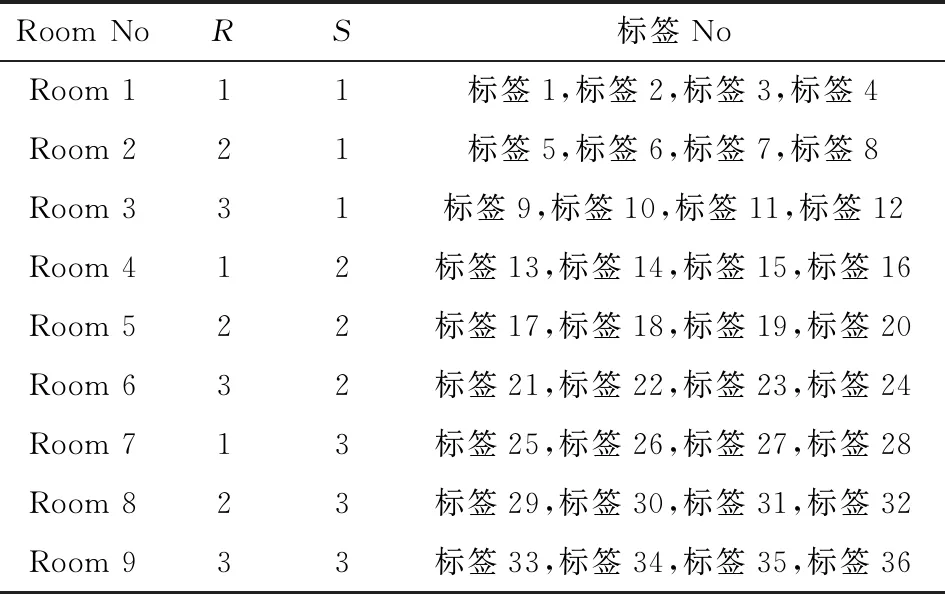
表2 房间号码-R-S-标签编号关联数据库
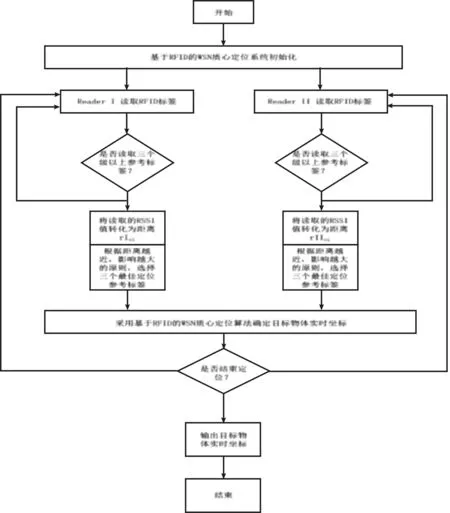
图5 WSN质心定位算法流程图

图6 WSN质心定位算法上位机软件
4.3 实验验证
同一实验环境下,取d0=1 m,对同一RFID标签,测量其前、后、左、右、上、下等6个方向的RSSI值100次,取平均值PLd0=-60.12 dBm代入式(1),然后每隔m测量RSSI值代入式(1)计算n,取平均值n=-3.56入式(1),得到如图7所示距离-RSSI函数关系。
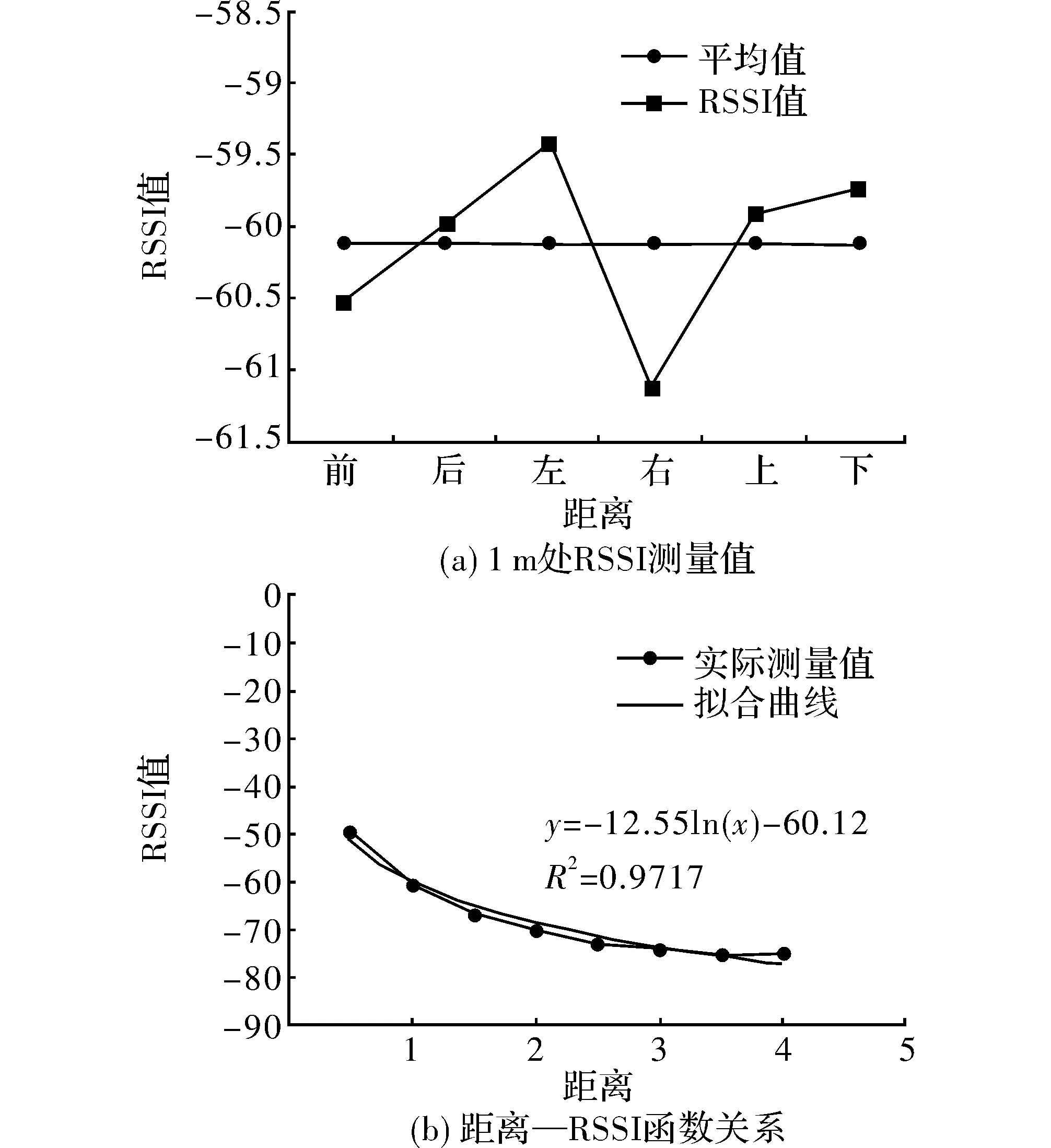
图7 距离—RSSI函数关系
根据图3进行RFID阅读器和标签布置,L1=2.000 0 m,W1=2.000 0 m, Room6中,RFID标签(R,S,P,Q)信息如下:标签21 ,标签22 ,标签23 ,标签24 ,ReaderI ,ReaderII。
根据式(3)计算各个标签的实际坐标:
标签21实际坐标为(1.000 0,1.000 0),
标签22实际坐标为(3.000 0,1.000 0),
标签23实际坐标为(1.000 0,3.000 0),
标签24实际坐标为(3.000 0,3.000 0),
ReaderI实际坐标为(0.750 0,2.500 0),
ReaderII实际坐标为(1.250 0,2.500 0)。
4.3.1 传统质心定位算法计算目标物体坐标

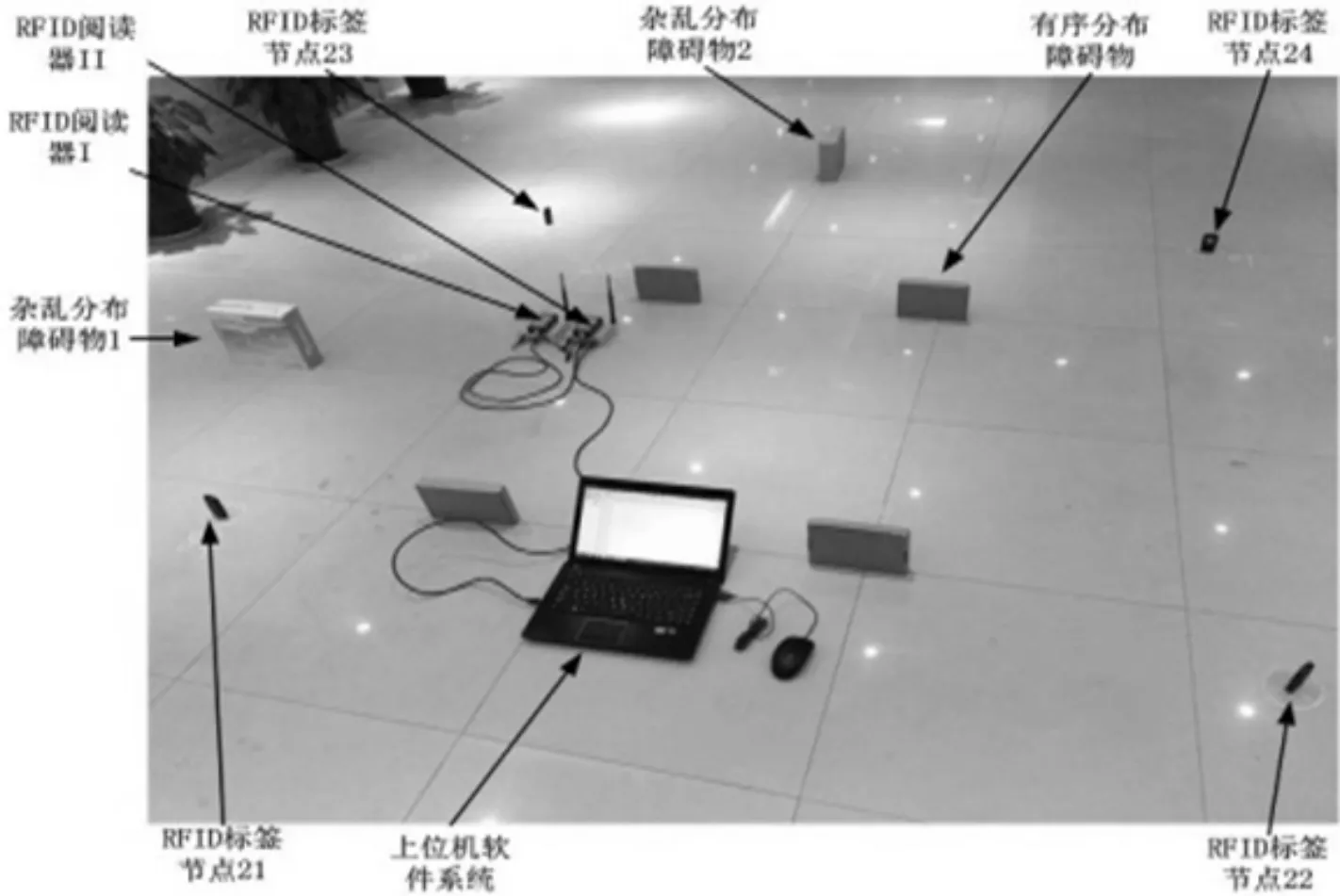
图8 WSN质心定位算法实验模型
4.3.2 WSN质心定位算法确定目标物坐标
在实验环境中,分布有杂乱障碍物和有序排列的障碍物,如表3所示选择21、23、24作为最佳定位标签,采用WSN质心定位算法,利用表1,分别确定ReaderI和ReaderII识别标签对应三角形顶点坐标分别为
(XⅠA1,YⅠA1)=(0.503 6,2.273 4)
(XⅠA2,YⅠA2)=(0.481 5,2.254 1)
(XⅠA3,YⅠA3)=(1.572 9,2.332 0)
(XⅡA1,YⅡA1)=(0.990 6,2.010 0)
(XⅡA2,YⅡA2)=(0.874 2,2.293 9)

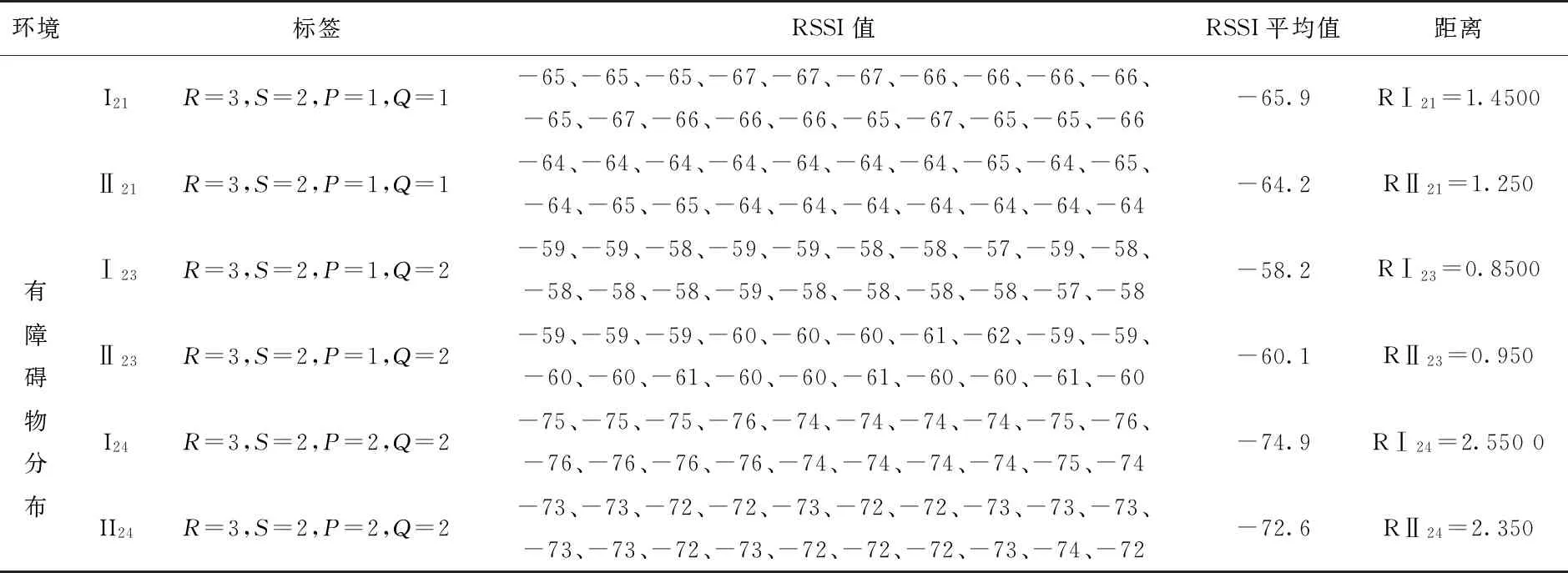
表3 距离—RSSI数据
4.3.3 实验结果

表4 实验结果分析
表3表明,相对于传统的质心定位算法,本文提出的WSN质心定位算法定位精度高,环境适应能力强,可用于相对复杂的室内环境定位。
5 结束语
本文提出基于RFID的WSN质心定位算法,减少了RFID阅读器的使用量 ,降低系统成本,合理引用更多的标签定位信息,根据WSN质心定位算法,引入标签定位信息关联数据库这一概念,不仅节省定位时间,且提升了定位精度,大幅增强了定位系统的灵活性和适用性,可用于室内定位及导航等领域。
[1] 张果谋.基于RFID的环境自适应室内定位方法研究[D].西安:西安理工大学,2013.
[2] Shirehjin A An,Yassine A,Shirmohammadi S. Equipment location in hospital using RFID-based positioning system[J].IEEE Transactions on Information Technology in Biomedicine,2012,16(6):1058-1069.
[3] WintrA N. Introduction to RFID technology[J].IEEE Pervasive Computing,2006,5(1):25-33.
[4] 孙瑜,范志平.射频识别技术及其在室内定位中的应用[J].计算机应用,2005,25(5):1205-1208.
[5] 叶欢.WiFi指纹定位及跟踪技术研究[D].大连:大连理工大学,2014.
[6] 罗利.基于Android的WiFi室内定位技术研究[D].成都:西南交通大学,2014.
[7] Joe-Air J,Cheng L C,Chia P C,et al.A RSSI based environmental adaptive dynamic radiation power management for wireless sensor networks[C].Macao:Proceedings of APCCAS,IEEE Press,2008.
[8] Ahn H S,Yu W.Environmental adaptive RSSI based indoor localization[J].Automation Science and Engineering , 2009, 6(10):626- 633.
[9] 温佩芝,苏亭婷,李丽芳,等.基于粒子群的射频识别定位算法[J].计算机工程与科学,2014,36(5):917-922.
[10] 刘熙,刘开华,马永涛,等.多径环境下无源超高频RFID定位算法研究[J].计算机工程,2014,40(8):33-37.
[11] Bergamo P,Mazzini G.Localization in sensor networks with fading and mobility[M].New York:IEEE Press,2002.
[12] 白国振,杨勇明,李厦,等.基于射频识别的智能室内定位系统研究[J].信息与控制,2013,42(3):364-370.
[13] Andreas F,Helmut B.RSSI-based indoor localization using antenna diversity and plausibility filter[C].Nanjing:International Conference on Electronic & Mechanical Engineering and Information Technology,2009.
[14] 张博,李军怀,王志晓,等.RFID并行化定位方法研究与实现[J].计算机工程与应用,2014,50(15):181-186.
[15] 郑学伟.基于权值参数的WiFi定位算法研究[J].国外电子测量技术,2014,33(3):35-37.
[16] 边燕.矿井安全生产指挥调度系统的研究与设计[D].天津:河北工业大学,2014.
[17] 张德建.基于WiFi的室内定位系统的研究与设计[D].武汉:华中师范大学,2014.
[18] 陶志勇,路笋.基于ZigBee的修正加权质心定位算法研究与实现[J].计算机应用于软件,2014,31(1):123-126.
[19] 刘运杰,金明录,崔承毅.基于RSSI的无线传感器网络修正加权质心定位算法[J].传感技术学报,2010,23(5):717-721.
[20] 马贤同,罗景青,孟祥豪.基于时差的同类辐射源信号分选定位方法[J].电子与信息学报,2015,37(10):2363-2368.
[21] 王欢,孙进平,付锦斌,等.角度信息辅助的集中式传感器多假设跟踪算法[J].电子与信息学报,2015,37(1):56-62.
Study on WSN Centroid Positioning Algorithm Based on RFID
YANG Yongming
(Public Experiment Center,University of Shanghai for Science and Technology, Shanghai 200093, China)
With the development of the IOT technology, indoor positioning is more attention, this paper is aimed at the lower accuracy of GPS indoor positioning,put forward WSN centroid positioning algorithm based on RFID and WSN positioning information field, by using the relational database of RFID tags positioning information,to achieve the goal’s room level positioning and precision positioning . Experimental results show that WSN centroid positioning algorithm based on RFID has higher positioning accuracy, and strong ability to adapt the environment, so can be used in the field of indoor positioning.
RFID; WSN centroid positioning; positioning information field; relational database
10.16180/j.cnki.issn1007-7820.2016.12.021
2016- 03- 02
上海市自然科学基金资助项目(12ZR1420700);上海市高校青年教师培养资助计划基金资助项目(1014204803)
杨勇明(1986-),男,硕士,工程师。研究方向:机器人技术及机电一体化技术。
TN821+.1;TP393.9
A
1007-7820(2016)12-073-06
