多预警机协同探测能力及航线规划
2016-12-24蔡万勇金加根
祁 炜, 李 侠, 蔡万勇, 金加根
(空军预警学院, 湖北 武汉 430019)
多预警机协同探测能力及航线规划
祁 炜, 李 侠, 蔡万勇, 金加根
(空军预警学院, 湖北 武汉 430019)
针对带状责任探测区多架预警机协同探测问题,根据是否进行更高层级的多情报源信息融合处理,定义了两种协同模式。构建了多预警机实时探测覆盖区估算模型;提出了稳定覆盖度概念和定量公式;讨论了带状责任探测区中多预警机部署问题,给出了具体的协同部署优化决策模型。对两种协同模式下多预警机部署问题进行仿真分析,结果表明Model2明显优于Model1,所构建的各种估算与决策模型考虑了各种主要的内、外因素,具有实用价值。
预警机; 协同探测; 实时探测覆盖区; 航线规划
0 引 言
在承担边境防空预警作战任务时,预警机的责任探测区通常呈较长带状分布,且需要多架预警机协同探测。预警机协同模式可分为两种:Model1——各预警机独立遂行局域性责任子区探测任务,相互之间只进行横向的跨区任务交接,各自感知的目标信息不进行更高层级的融合处理和情报共享,这是目前常用的一种协同模式;Model2——各预警机独立遂行局域性责任子区探测任务,相互之间不仅进行跨区任务交接,且各自感知的目标信息进行更高层级的融合处理和情报共享,具体多源目标信息融合处理由指定的某架预警机的信息融合分系统(或上级情报中心)承担。目前,人们大多关注于Model1的多预警机联合探测问题的研究,如文献[1-2]提出了预警机实时探测覆盖区的概念,并给出了单架预警机的具体算例。文献[3]提出了多预警机并立和串接组合协同探测的概念,并指出在预警机架数有限的前提下,串接航线易造成稳定覆盖区域不稳定,易形成盲区的结论。文献[4]提出了一种基于累积检测概率矩阵2-范数的单机航线优化准则,并讨论了多预警机飞行时间间隔和航线间隔对重点监视区域累积发现概率的影响问题。文献[5-6]从目标进入预警机覆盖区概率的角度,讨论了双平行线和横8两种巡航航线飞行时预警机的瞬时覆盖率问题。文献[7]基于突防目标机与预警机的相对位置和速度关系,提出了探测强效区和探测弱效区的概念,并进行了相应的作战效能仿真分析。文献[8]提出了预警机兵力使用策略,并讨论了单架预警机航线规划问题。文献[9]基于雷达干扰自卫距离公式,讨论了有源干扰条件下的多预警机部署优化问题。上述文献未涉及多预警机目标信息融合处理和情报共享。
本文构建了两种协同模式的多预警机实时探测覆盖区估算模型,提出了稳定覆盖度的概念和定量公式;讨论了带状责任探测区中多预警机部署问题,并给出了具体的部署优化决策模型;对两种协同模式的多预警机部署问题进行仿真分析。通过仿真分析,证明了Model2优于Model1,且随着责任探测区L的增加,以及预期的覆盖度要求越高时,Model2更加优于Model1。本文构建的各种估算与决策模型考虑了各种主要的内、外因素,具有实用价值。
1 单预警机实时探测覆盖区
对于单架预警机而言,实时探测覆盖区是指其在特定高度巡航航线任意位置,均能以规定的发现概率Pd和虚警概率Pfa,对位于高度层H上的指定目标遂行有效探测的区域。所谓指定目标是指目标类型和目标的雷达散射截面(radar cross section,RCS)值均已确定,所谓有效探测是指对目标进行数据率为fc的不间断探测。不失一般性,以常用的双平行线航线为例,如图1所示,令双平行线航线的中心O1,0为坐标原点,航线转弯顶点分别为O1,1(-a1,-b1)、O1,2(a1,-b1)、O1,3(a1,b1)、O1,4(-a1,b1),机载雷达最大探测距离为R1。
图1 单预警机实时探测覆盖区(双平行线航线)Fig.1 Real-time detection covered area of single aircraft early warning (double parallel line flight)
图1中阴影部分S1,0即为单架预警机的实时探测覆盖区(简称实时区),其4个顶点平面坐标分别为
S10[1]的具体估算公式为
S10=S11+S12-S13
(1)
式中,S11为四边形A1B1C1D1面积;S12为4条弧对应4个圆心的扇形面积之和;S13为4个弓形面积;θ1为∠A1O1,1D1,且
(2)
通常,a1∈[30 km,45 km],b1∈[10 km,15 km][10],当R1=370 km时,S10∈[391 478 km2,416 389 km2]。由式(1)和式(2)可知,单架预警机的实时探测覆盖区的大小主要由具体规划的双平行线航线和实际最大探测距离决定,而R1与目标反射截面积σ、脉冲积累数m、信噪比S/N、气象衰减系数δ、气象衰减区间距dq、不同目标类型的起伏插损Lf等内外部因素有关[11],即
(3)
式中,cont为由系列雷达固有技术参数决定的常量,即
(4)
对于机载预警雷达而言,防空警戒、对空引导、以及小目标探测等不同的具体任务的检测概率要求不同,通常为0.5、0.8、0.9,且R1(Pd=0.5)>R1(Pd=0.8)>R1(Pd=0.9),而虚警概率要求均为Pfa=10-6。而不同目标类型和目标具体反射截面积对实际R1影响很大。不同检测概率要求、不同目标类型、目标具体反射截面积时的实际R1的估算方法参考文献[12]。
2 多预警机实时探测覆盖区
图2 双预警机实时交叠覆盖区Fig.2 Real-time overlapping covered area of double aircraft early warning
预警机1和预警机2的实时交叠覆盖区面积的估算公式为
(5)
Scross=2(SE1D1M1s+SE1D1g+SE1B2M1s+SE1B2g)
(6)
式中
(7)
(8)

图3 基于Pd双预警机协同预警实时覆盖区域Fig.3 Real-time covered area of cooperation early warning of double aircraft early warning based on Pd
i=1,2,…,N, j=1,2
(9)
(10)

图4 多架预警机协同覆盖责任探测区Fig.4 Multi-aircraft early warning cooperative covered detection area
3 多预警机航线规划
对于较长的带状责任探测区而言,多预警机航线规划为一个多约束条件下的决策问题。航线规划的终级目标是实现对指定责任探测区的稳定覆盖,具体求解的关键参数是各预警机航线中心间距,而约束条件包括责任探测区稳定覆盖度要求、各预警机航线中心点连线与责任探测区的内边界和外边界的间距、多架预警机协同模式、以及由机载雷达实际最大探测威力决定的单预警机实时覆盖区、由横向的跨区任务交接决定的多预警机实时交叠覆盖区等。定义责任探测区稳定覆盖度ηC为
(11)
并令责任探测区的外边界的纵坐标为yD_out,则航线规划决策问题可具体定义为在多个约束条件下寻找一组最佳的航线中心间距,即
{di}={di}opt
(12)

如果只考虑突袭方向单侧目标的预警探测问题,则只需把式(12)中yD_outW/2换成yD_outW,其他约束条件不变。此时,相当于责任区内边界移至预警机航线中心点,责任区纵深宽度W的取值可根据具体情况而定,但这样并不能扩大预警机的实时探测区,只是相当于移动预警机阵位,如想扩大实时探测区,可减小预警机航线a、b值或增加探测威力Rmax值。
4 仿真分析
4.1 两种协同模式对比分析
为了方便进行两种协同模式作战效能的对比分析,不妨定义稳定覆盖区得益度为
(13)

图5 di与Ssum关系Fig.5 Relationship between diand Ssum
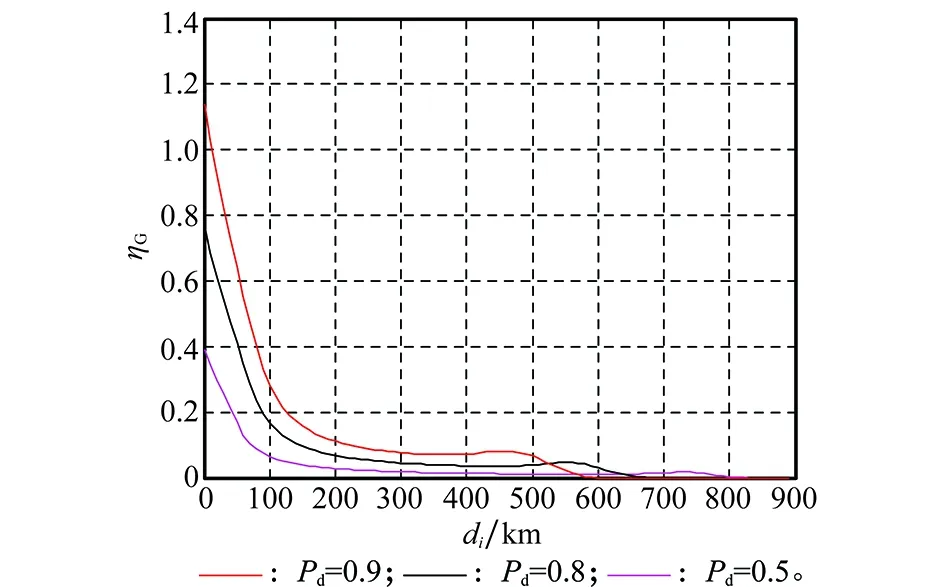
图6 di与ηG关系Fig.6 Relationship between diand ηG
由图5和图6可得以下结论:
(1) 要求的检测概率值越小,则两机协同探测范围Ssum值越大,且相互脱离的di临界值越大,即在较小检测概率工作方式时,能在更大的责任探测区中提供连续目标情报。
(2) 当di小于其临界值时,随着检测概率的增大,ηG越大,说明要求的检测概率值越大时,采用Model2方式工作比采用Model1方式工作的得益更明显。
(3) 不论何种检测概率要求,当Ssum恒定时,Model2比Model1的di临界值都大,说明Model2可以在更大的di值时获得相应的实时交叠覆盖区,从而确保相邻两机之间实现可靠的横向跨区任务交接。
4.2 L与N取值关系分析


(15)

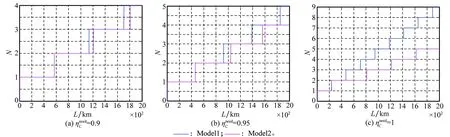
图7 L与N关系Fig.7 Relationship between L and N
由图7可得以下结论:
(1) 随着L的增加,采用Model2协同时,所需调用的预警机架数更少。
5 结 论
针对带状责任探测区防空预警作战需求,本文提出了两种具体协同工作模式,构建了多预警机实时探测覆盖区估算模型、多预警机协同工作航线规划决策模型。所构建的模型考虑了各种主要的内、外因素,可供实际预警机兵力部署决策时参考使用。因篇幅所限,所建模型尚未涉及具体的战场气象条件、干扰环境、动态探测盲区、安全距离等因素,而这些因素对预警机实际作战效能的具体影响,则有待进一步研究。
[1] Liu B, Shen Q, Li W Q.Airborneearlywarningsystem[M]. Beijing: National Defense Industry Press,2012:211-215.(刘波,沈齐, 李文清. 空基预警探测系统[M].北京: 国防工业出版社, 2012: 211-215.)[2] Liu B, Wang H J, Chen C H. Airborne early waring radar power coverage analysis and routes design[J].AirForceEquipmentResearch,2012,6(1):21-24.(刘波,王怀军,陈春晖.预警机雷达威力覆盖分析与航线设计[J].空军装备研究院,2012,6(1): 21-24.)
[3] Liu B, Chen C H, Shen Q. A study on flight course for airborne early warning radars coordinated detection[J].ModernRadar, 2012, 34(6): 1-4. (刘波, 陈春晖, 沈齐. 机载预警雷达协同探测航线模式研究[J]. 现代雷达, 2012, 34(6): 1-4.)
[4] Fu Y, Tang Z Y, Sun Y J. Cooperative detection routes optimization of AEW radar[J].InfraredandLaserEngineering, 2014, 43(12): 4177-4185. (付莹, 汤子跃, 孙永健. 机载预警雷达协同探测航线优化[J]. 红外与激光工程, 2014, 43(12): 4177-4185.)
[5] Liu X F. Analysison dynamic perofrmance of AEW radar initiative detection space[D]. Changsha: National University of Defense Technology, 2005: 36-58. (刘新飞. 机载预警雷达主动探测空间动态性能分析[D]. 长沙:国防科学技术大学, 2005: 36-58.)
[6] Liu X F, Yan H X, Pan L, et al. Analysis of dynamic perfor-mance of AEW radar detecting area[J].ComputerSimulation,2006,23(8):40-43.(刘新飞,闫红星,潘亮,等.机载预警雷达探测空间动态性能分析[J].计算机仿真,2006,23(8):40-43.)
[7] Jia L S, Wu W H, Gao W, et al. Analysis on early warning airspace of airspace patrolling route adopted by foreign airborne early warning airplanes[J].JournalofNavalAeronauticalandAstronauticalUniversity,2011,26(1):36-40.(贾临生,吴文海,高伟,等.国外固定翼预警机空域巡逻航线的预警空域分析[J].海军航空工程学院学报,2011,26(1):36-40.)
[8] Chen Y X, Zhang Y, Zhuang J, et al. Method on demand determination of early warning airplane based on combat direction[J].FireControl&CommandControl,2014,36(8):94-97.(陈云翔,张毅, 庄骏, 等.基于作战方向的预警机需求确定方法[J]. 火力与指挥控制, 2014, 36(8): 94-97.)
[9] Wang G S, Li Q, Qian Q F, et al. Deployment and optimization to multi-AWACSs under the active jamming condition[J].InfraredandLaserEngineering,2012,41(11):2973-2980.(王国师,李强, 钱琼芬, 等.有源干扰条件下多预警机空中部署及优化[J]. 红外与激光工程, 2012, 41(11): 2973-2980.)
[10] Lu J, Li N J, Cao C, et al.Introdutiontoairborneearlywarningsystem[M]. 2nd ed. Beijing: National Defense Industry Press, 2011: 60-62.(陆军, 郦能敬, 曹晨,等.预警机系统导论[M]. 2版. 北京: 国防工业出版社, 2011: 60-62.)
[11] Skolnik Merrill I.Introductiontoradarsystems[M]. 3rd ed. Boston: McGraw Hill, 2001: 88-94.
[12] Wan F B, Li X, Hua L F, et al. Study on problems of radar detection range conversion between different types of target[J].ModemRadar, 2007, 29(12): 18-21. (万凡兵, 李侠, 花良发, 等.不同目标类型之间雷达探测距离换算的研究[J]. 现代雷达, 2007, 29(12): 18-21.)
Multi-AEW cooperative detection capability and flight planning
QI Wei, LI Xia, CAI Wan-yong, JIN Jia-gen
(AirForceEarlyWarningAcademy,Wuhan430019,China)
In view of the problem of multi-aircraft early warning (AEW) cooperative detection for the ribbon responsibility area, two cooperative modes are defined based on whether or not higher level multiple information sources are utilized. Firstly, a real-time detection covered area’s estimation model of multi-AEW is given, and the concept of stable coverage degree and a quantitative equation are proposed respectively. Secondly, the decision-model of multi-AEW optimal deployment is discussed and the definite optimal model with cooperative deployment is also given. Finally, the simulation instance of two models is provided, the results show the Model2 is much better than Model1, and various major internal and external factors of estimation and decision model are considered, so the results is valuable.
aircraft early warning (AEW); cooperation probing; real-time detection covered area; flight planning
2015-11-27;
2016-06-21;网络优先出版日期:2016-11-09。
TN 951
A
10.3969/j.issn.1001-506X.2016.12.13
祁 炜(1981-),男,讲师,博士研究生,主要研究方向为预警装备效能评估与验证。
E-mail:bluewind19810328@163.com
李 侠(1956-),男,教授,主要研究方向为雷达装备技术、雷达装备作战运用及效能评估。
E-mail:xliax004@sina.com蔡万勇(1981-),男,讲师,博士,主要研究方向为雷达装备作战运用与仿真。E-mail:wbh8927@sina.com金加根(1973-),男,副教授,博士,主要研究方向为雷达信息融合及目标跟踪。E-mail:jinjiagen@126.com
网络优先出版地址:http:∥www.cnki.net/kcms/detail/11.2422.TN.20161109.0905.008.html
