合成宽带脉冲多普勒雷达
2016-12-24毛二可范花玉
毛二可, 范花玉
(1. 北京理工大学嵌入式实时信息处理技术北京市重点实验室, 北京 100081;2. 北京理工大学信息与电子学院雷达技术研究所, 北京 100081)
合成宽带脉冲多普勒雷达
毛二可1,2, 范花玉1,2
(1. 北京理工大学嵌入式实时信息处理技术北京市重点实验室, 北京 100081;2. 北京理工大学信息与电子学院雷达技术研究所, 北京 100081)
合成宽带脉冲多普勒(pulse Doppler,PD)雷达可以同时实现距离和速度二维高分辨;具备良好的相参特性,利用相推原理能实现极高的测距和测速精度,可用于复杂目标多部件微动测量;具有较强的抗杂波和抗干扰性能。阐述了合成宽带PD雷达体制及其主要信号形式,介绍了合成宽带PD雷达的距离速度二维高分辨实现原理,总结了合成宽带PD雷达的主要特性,最后通过一系列实验验证了合成宽带PD雷达的微动测量能力、高精度测距测速能力和相参ISAR成像能力。
合成宽带信号; 脉冲多普勒雷达; 距离速度二维高分辨; 抗杂波; 抗干扰; 微动测量
0 引 言
20世纪60年代,为了解决强杂波下发现运动目标的难题,人们提出了脉冲多普勒(pulse Doppler,PD)雷达体制,该体制最早建立在窄带信号基础上,并在国内外得到了广泛应用。PD雷达不仅能够在频域实现运动目标与杂波的分离,而且具有单根谱线滤波的能力,能够提供精确的目标速度信息。在预警探测和防空反导领域,要求雷达同时具备发现和识别目标的能力,即要求雷达同时实现距离和速度二维高分辨,这就是宽带脉冲多普勒雷达。根据相关报道美国最新的几种相控阵雷达均采用了宽带脉冲多普勒雷达体制,但相关宽带雷达所采用的波形、参数,以及能够兼容距离高分辨和速度高分辨的雷达解决方案等未见公开报导。
根据雷达系统理论,雷达速度测量分辨率与相参积累时长有关,时间越长则分辨率越高,因此PD雷达采用脉冲串以加大信号处理时间;而距离测量分辨率与信号带宽相关,带宽越大则分辨率越高,然而速度在脉冲串内引起的回波包络走动也越大,造成回波相参积累损失。若采用瞬时窄带合成宽带信号,其中每个脉冲是窄带的,对高速目标允许有较长的相参处理时间,同时多个载频不同的脉冲可以合成大带宽信号,提高距离分辨力[1]。综上可知,合成宽带信号可以兼容PD处理,合成宽带PD雷达就是基于合成宽带信号的宽带PD雷达。
本文首先阐述了合成宽带PD雷达两种主要的信号形式及其应用特点,接着介绍了合成宽带PD雷达的距离速度二维高分辨实现原理,然后总结了合成宽带PD雷达的主要特点,最后基于自研的S波段实验雷达,开展了一系列微波暗室和外场实验,验证了合成宽带PD雷达的微动测量能力、高精度测距测速能力和相参ISAR成像能力。
1 合成宽带PD雷达信号形式
频率步进信号是典型的瞬时窄带合成宽带信号[2],以频率步进信号为基础[3],在各脉冲或子脉冲内进行频率编码或相位编码调制,可以得到合成宽带PD雷达两种主要的信号形式:即多周期脉冲间频率步进信号和多周期脉冲内频率步进信号。
多周期脉冲间频率步进信号的时频图如图1所示,该信号也称为多周期频率步进脉冲序列信号。每个脉冲重复周期只发射一个脉冲,不同脉冲重复周期的脉冲具有频率步进的载频,多个脉冲重复周期构成一个频率步进周期,多个频率步进周期构成一个相参处理周期。
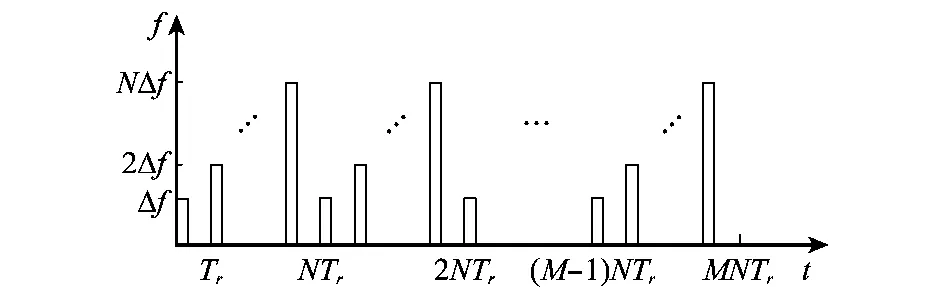
图1 多周期脉冲间频率步进信号时频图Fig.1 Time-frequency image of multi-cycle inter-pulse stepped frequency signal
多周期脉冲内频率步进信号的时频图如图2所示,该信号也称为多周期频率步进子脉冲序列信号。每个脉冲重复周期发射一串由多个载频步进的子脉冲组成的子脉冲序列,序列内的各个子脉冲相互正交,多个脉冲重复周期构成一个相参处理周期。
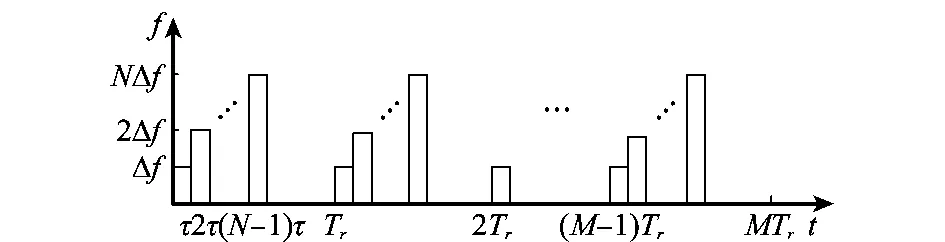
图2 多周期脉冲内频率步进信号时频图Fig.2 Time-frequency image of multi-cycle intra-pulse stepped frequency signal
上述两种信号中,脉冲或子脉冲间载频步进方式可以是线性步进或随机跳频,脉冲或子脉冲内调制方式可以采用单频、线性调频或相位编码等。
多周期脉冲间频率步进信号与传统的频率步进信号类似,其优点是信号产生、发射和接收简单,但是由于频率步进在不同发射脉冲之间进行,相参处理周期相对较长,因此受目标运动影响较大,适用于探测低速目标,且对数据率要求不高的场景。典型的信号包括简单频率步进信号[4]、调频步进信号[5]和频率步进相位编码信号[6-7]。这类信号一般采用时分的方法进行同频点分离。
多周期脉冲内频率步进信号的产生、发射和接收与大时宽带宽信号一致,但是相比第一种信号形式,这种信号的频率步进发生在同一个发射脉冲的不同子脉冲序列之间,在同样带宽条件下,其相参处理周期较短,因此受目标运动影响较小,适用于探测高速目标。典型的信号包括频率编码信号,大时宽带宽Chirp信号,频率相位复合编码信号[8]。为进行PD处理,这类信号可以采用频分的方法对各子脉冲进行同频点分离,如针对大时宽带宽Chirp信号,提出了通过多子脉冲切分等效为宽带PD处理的成像方法[9],该方法不仅能够实现目标距离-速度二维高分辨,而且能够降低信号采样率,减少信号处理量,便于信号的实时处理。
2 合成宽带PD雷达原理
合成宽带PD雷达的目标距离和速度二维高分辨处理分两步进行:先对不同频点的窄带脉冲或子脉冲进行PD处理,从速度维对目标与杂波进行分辨,然后对目标所在速度维进行合成脉压处理,得到目标距离-速度二维高分辨成像结果,从而实现对目标回波的相参积累。
具体的合成宽带PD雷达原理如图3所示。合成宽带PD雷达发射多周期频率步进信号,并利用时分或频分的方法分离出各个步进频点的回波;然后对多周期的同频点回波脉冲信号进行频谱分析(PD处理),不仅可以从频率域对不同速度的目标和杂波进行分离,达到抑制杂波和进行多目标分辨的目的,而且可测得各个目标回波的径向速度;进而可对不同步进频点不同速度通道的回波进行运动补偿,减弱运动对一维高分辨距离成像的影响;然后对每个速度通道的不同步进频点回波信号进行相参合成脉压处理,进一步得到每个速度通道的一维高分辨距离像,从而得到目标的距离-速度二维高分辨成像结果,实现目标回波的相参积累;对该相参积累结果进行二维恒虚警检测,最终实现目标距离和速度二维高分辨测量。
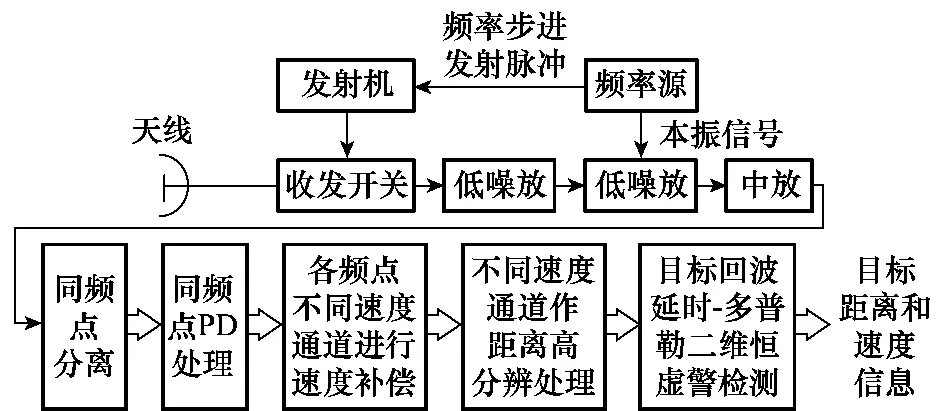
图3 合成宽带PD雷达原理框图Fig.3 Principle diagram of the synthetic wideband PD radar
3 合成宽带PD雷达特点
合成宽带PD雷达具有良好的相参性能和瞬时窄带合成宽带特性,使其易于实现距离和速度二维高分辨,抗杂波和抗干扰性能显著增强;同时两种不同的信号形式使合成宽带PD雷达信号设计更灵活,能够适应不同的应用场景需求。下面总结了合成宽带PD雷达的八大特点。
(1) 幅相一致性校正易于实现,能够实现接近理想的雷达性能
大时宽带宽Chirp信号很难进行幅相一致性校正,若选定几个频点进行幅相校正,校正效果有限,且校正点附近的频谱也会受影响;对多周期频率步进合成宽带信号,可以采用时分或频分方法区分各个步进频点,这有利于实现基于每个频点的幅相一致性校正处理。
(2) 同时具备高距离分辨率和高多普勒分辨率
频率步进合成宽带信号为大时宽带宽信号,其模糊函数近似呈 “图钉形”,可进行理想的匹配滤波处理,能够实现基于宽带信号的高距离分辨和高速度分辨。
(3) 可解速度模糊
对于导弹等超高速目标,可以根据目标速度范围,遍历目标所有可能的模糊数,对目标进行相应的速度补偿,当速度补偿结果最接近目标真值时,匹配处理结果的幅值最大,从而可通过多通道并行处理求解速度模糊数,即通过加大硬件处理能力解速度模糊[10],因此宽带PD雷达原则上可以不用参差重复频率来解速度模糊,在相同数据率条件下提高了雷达威力。
(4) 可通过波形设计使雷达无距离模糊
①对一般雷达,当回波延时超过雷达重复周期时,目标回波会出现距离模糊;而对于采用多周期频率步进合成宽带信号的宽带PD雷达,通过改变本振延时,即利用接收机处理可以分别得到所需匹配的距离段[11-12],因此,在单个频率步进周期相参积累时间内,不存在距离模糊。
②若对频率步进脉冲进行调制,如脉内进行相位编码,且不同频率步进周期内脉冲采用不同的相位编码类型,则此时信号不存在周期性,即雷达无距离模糊。
(5) 在杂波中检测目标的能力增强
①采用多周期频率步进合成宽带信号,相对于其他宽带信号形式,对高速目标允许有多个脉冲重复周期的相参处理时间。
②对运动目标,PD雷达体制可以有效去除强杂波[13];对静止或低速目标,由于雷达的宽带特性,宽带PD雷达的杂波分辨单元面积(或体积)小,杂波强度低,另外由于距离分辨率提高,杂波分布趋于稀疏,杂波区中出现大量无杂波或低杂波区,使得杂波所占距离单元数减少[14]。
③距离上无杂波折叠。对多周期脉冲间频率步进信号,其雷达接收机的本振信号也为频率步进信号,只有相应距离段回波混频后为中频,其他距离段回波因偏离中频被中放的带通滤波器所抑制,我们把合成宽带PD雷达的这种特性称为距离选通性,即能够通过改变本振信号延时,来选择性接收不同脉冲重复周期内的目标回波[11-12]。当雷达工作在强地/海杂波环境时,若采用窄带中高重频PD雷达,较远距离的面杂波可以折叠到近距离回波上,使杂波与目标回波在时间上重合;若采用多周期频率步进信号的宽带PD雷达,由于距离上无杂波折叠,故近距离小目标只需与同距离的杂波竞争,提高了检测小目标的能力。
(6) 利用相推原理能实现极高的测距精度
频率步进合成宽带信号更容易实现长时间相参处理,有利于实现更高精度的相推测距,该特性可以应用于微动测量[15-16],为目标识别提供更多的参考信息。
(7) 可用于高速目标探测
频率步进合成宽带PD雷达能同时测速和测距,再结合适当的信号波形选择和参数设计[17],宽带PD雷达能够具备较强的高速目标处理能力。
(8) 优良的抗干扰和低截获性能
采用多周期频率步进调制脉冲和多周期频率步进调制子脉冲序列信号,不同脉冲重复周期的雷达信号不具有周期性,并且每个发射脉冲内可以进行随机的频率和相位编码,采用现有基于数字射频存储 (DRFM) 技术的干扰装备,很难对其进行有效干扰。
4 合成宽带PD雷达实验验证
本文基于自研的一套S波段合成宽带PD雷达,开展了一系列微波暗室与外场实验。首先在微波暗室开展了音叉振动实验、角反射器位移实验和单摆实验,验证了合成宽带PD雷达极高的相位稳定度和良好的相参性能,展示了其高精度相推测距和微动测量能力;然后开展了外场弹射钢球实验,分析得到了钢球的高精度相推测距和测速结果,验证了合成宽带PD雷达同时实现距离和速度二维高分辨的能力;最后开展了民航飞机实验,获得了飞机的高质量ISAR图像,验证了合成宽带PD雷达的相参ISAR成像能力。
S波段实验雷达原理框图如图4所示[17-18],频率步进信号源利用DDS产生基带频率步进信号,经过锁相倍频电路产生频率步进发射脉冲信号和频率步进本振信号;回波信号经混频后得中频信号,放大后经中频采样得回波I、Q信号,信号采集完成后即可进行非实时处理。
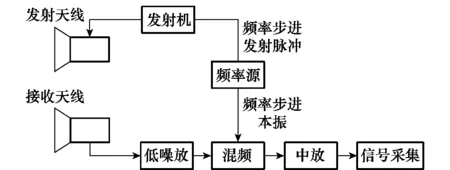
图4 S波段实验雷达原理框图Fig.4 Principle diagram of the S-band trial radar
S波段实验雷达发射峰值功率为100 W,信号中心载频为3.3 GHz,中频采样率为100 MHz,在进行信号处理时将根据信号瞬时带宽进行抽取操作。实验采用频率步进合成宽带信号,根据目标作用距离选用简单频率步进信号或者频率步进相位编码信号,信号合成带宽均为320 MHz。当探测200 m以内目标,如开展微波暗室实验和弹射钢球实验时,选用简单频率步进信号;当探测10 km以内目标时,如开展民航飞机ISAR成像实验,选用频率步进相位编码信号,具体参数如表 1所示。
表1 合成宽带信号参数表
4.1 微动测量能力
目前微动测量的难点在于提取幅度极小的微动特征信号,突破该瓶颈最有效的办法是提高雷达对精细运动的刻画能力,即提高雷达精确测距的能力[15]。利用相位信息进行测距,可以显著提高测距精度。下面通过微波暗室实验,根据目标回波的相位信息,提取目标微动。
4.1.1 音叉振动实验
在微波暗室中,分别用频率步进PD雷达和麦克风音频处理方法测定两个标称值分别为64 Hz和512 Hz的音叉振动频率。采用麦克风录入的音频处理方法,测量得到64 Hz音叉频率为63 Hz,512 Hz音叉频率为536 Hz。
实验测量64 Hz音叉频率为63.1 Hz,512 Hz音叉频率为535.6 Hz,与麦克风测量值基本一致。图5显示出了512 Hz音叉回波分析结果,由音叉测距结果可知,音叉振动幅度小于0.1 mm。音叉振动实验验证了合成宽带雷达测量极微小运动的能力,展示了实验雷达极高的相位稳定度。
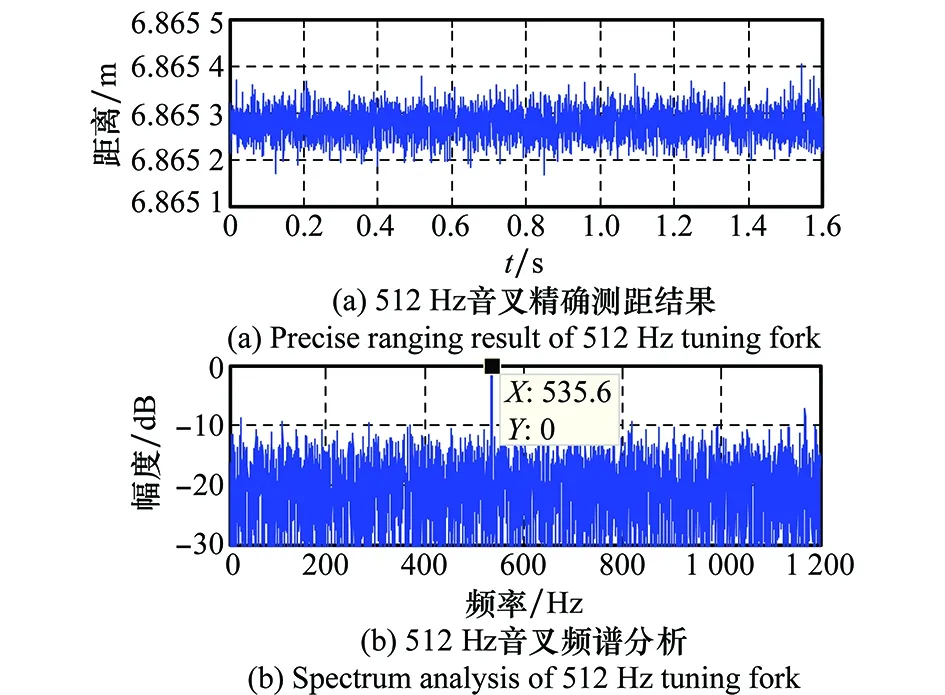
图5 512 Hz音叉回波测距及频谱分析结果Fig.5 Ranging result and spectrum analysis of 512 Hz tuning fork echo
4.1.2 角反射器位移实验
在微波暗室中,将角反射器置于位移精度可达0.01 mm的精密位移平台上,实验中通过精密位移平台调整角反射器相对于测量雷达的径向距离,并通过雷达测量该距离,从而验证雷达的测相和测距精度。
实验中设置平台的位移增量分别为1 mm,0.5 mm,0.2 mm和0.1 mm,且每种情况录取10个位置。图6显示出了位移增量为0.2 mm时的实验结果。
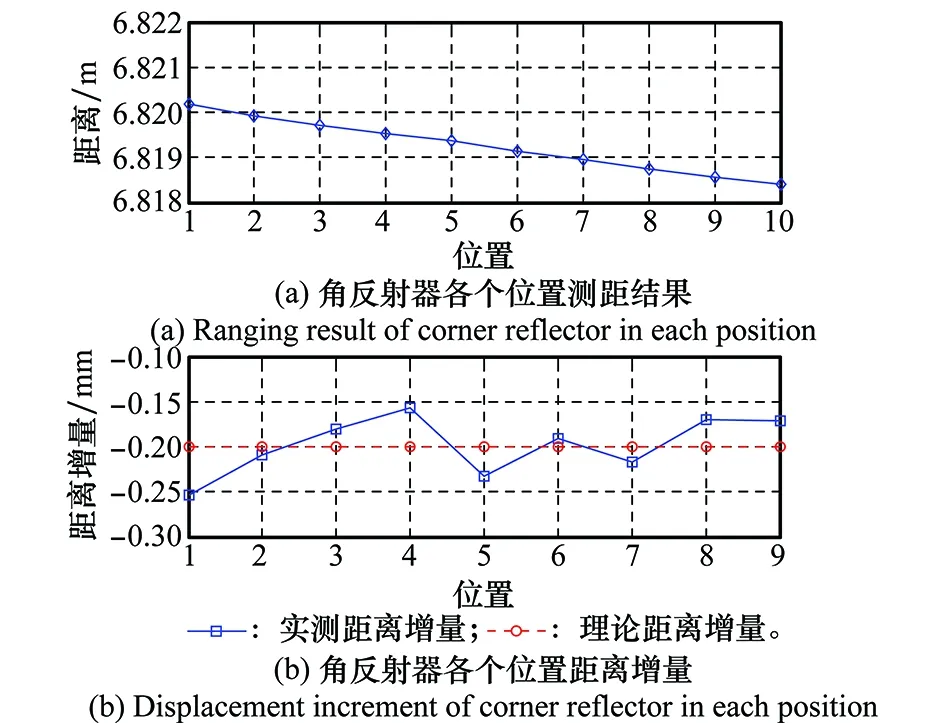
图6 位移增量为0.2 mm时角反射器回波测距结果Fig.6 Ranging results of corner reflector echo when displacement increment is 0.2 mm
由于积累后角反射器回波信噪比较高,各位置距离测量均方根误差约为0.001 6 mm,即相位测量均方根误差为0.013°,验证了实验雷达具有极高的相位稳定度;同时,由测距结果可知,其测距精度达亚mm量级,验证了合成宽带PD雷达的高精度相推测距能力。
4.1.3 单摆实验
在微波暗室中,利用合成宽带雷达观测单摆运动轨迹,并测量其振动频率。
当θ较小时(θ<5°),sinθ≈θ,即当单摆摆动幅度很小时,单摆作简谐振动,振动频率为
(1)
当θ较大时(θ≥5°),单摆作非线性运动,其振动频率包括1次、3次和5次谐波:
(2)
式中,ω≈ω0。实验中单摆所用钢球直径为3 cm,单摆摆长为0.776 m,由式(1)可知,钢球单摆理论频率为0.565 8 Hz。
当钢球摆幅较大时,单摆运动轨迹如7 (a) 所示,由图可知单摆做类正弦运动;对单摆运动轨迹进行频谱分析,分析结果如7(b) 所示,从图中不仅能够观察到0.569 Hz的单摆振动频率,还能观察到频率为1.705 Hz的3次谐波和2.843 Hz的5次谐波。
单摆实验验证了合成宽带雷达测量目标微小运动的能力,同时由单摆频谱测量值与理论值对比分析可知,合成宽带相推测距的精度很高,该技术有望应用于目标微动特性反演。
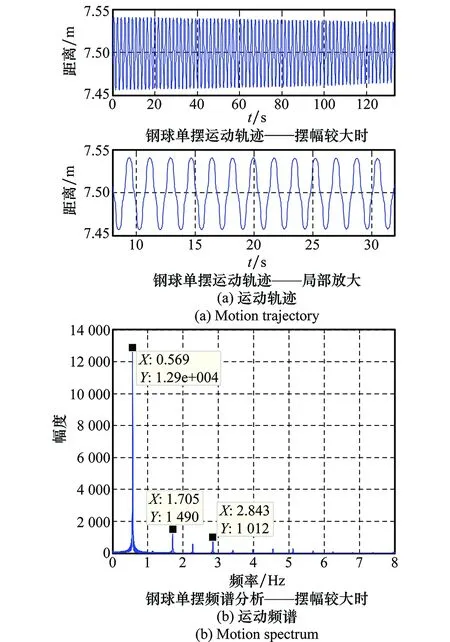
图7 钢球单摆运动分析Fig.7 Pendulum oscillation analysis of the ejection ball
4.2 高精度测距测速能力
弹射直径为5 cm的钢球,通过合成宽带PD处理,即从多普勒域抑制静止或低速强杂波,并得到钢球所在速度维上的一维高分辨距离像,从距离和速度两维同时实现钢球回波的相参积累,提高回波信噪比;同时由于宽带PD雷达良好的相参性能,可以在所得一维高分辨距离像的基础上对钢球进行高精度相推测距和测速处理。
相位测距存在严重的距离模糊,常采用包络测距解相位测距模糊的思想[19-20],该方法称为相推测距。由于实际中并不确知雷达初相和目标相对雷达的真实距离,故一般通过测量相邻帧距离增量实现相推测距[16],而相邻帧距离变化率即为目标速度,故求取相邻帧距离增量后,即可得到相应的高精度相推测距和测速结果。
在传统包络测距解相位模糊思想的基础上,我们提出了一种低信噪比条件下的相位解模糊方法,即进一步联合航迹平滑和最小熵方法解相位模糊,推进了相推技术的工程化应用。下面给出高精度相推测距和测速结果。
钢球随时间变化的一维高分辨距离像如图8所示,由于图像显示的动态范围有限,故将第1~2 650帧一维距离像分开绘制。
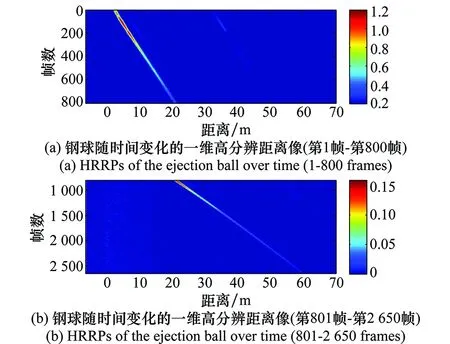
图8 钢球一维高分辨距离像Fig.8 HRRPs of the ejection ball
钢球包络测距结果如图9所示,图9(a)中滤波前后结果之差视为包络测距起伏误差,如图9(b)所示,统计可得包络测距起伏均方根误差为14.19 mm。
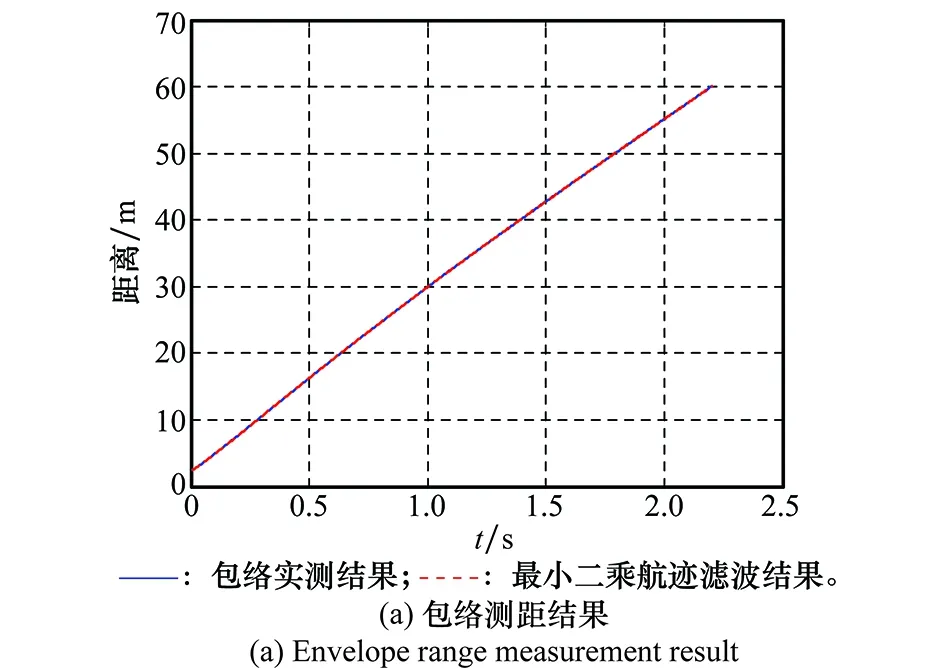
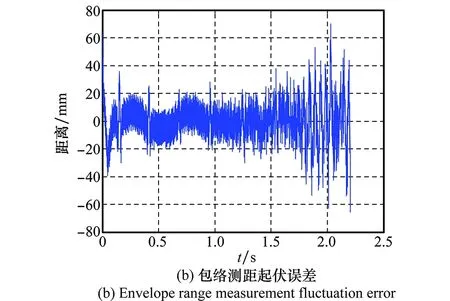
图9 包络测距结果与测距起伏误差示意图Fig.9 Schematic diagrams of envelope range measurement result and fluctuation error
钢球相推测速结果如图10所示。由于钢球是从雷达左侧斜向右侧弹射,在弹射出去的一小段时间内,钢球相对雷达视角变化较大,从而径向速度变化较大,如图中速度上升段所示,此后钢球径向速度主要受空气阻力的影响,如图中减速段所示。由于不知道钢球真实速度,故将速度拟合前后的偏差视为相推测速起伏误差,如图10(b)所示,随着钢球远离雷达,信噪比逐渐降低,约从40 dB以上一直降低到20 dB左右,故相推测速起伏误差逐渐增大;当脉压后一维距离像信噪比大于30 dB时,相推测速起伏均方根误差为0.057 m/s,当信噪比大于20 dB时,相推测速起伏均方根误差为0.25 m/s。实际中将平滑滤波后的结果作为最终的相推测速结果,因为平滑滤波相当于对回波进行非相参积累,即等效为提高相推测速信噪比,故相比于直接测量结果,平滑滤波后的测速精度大约能提高一个数量级。
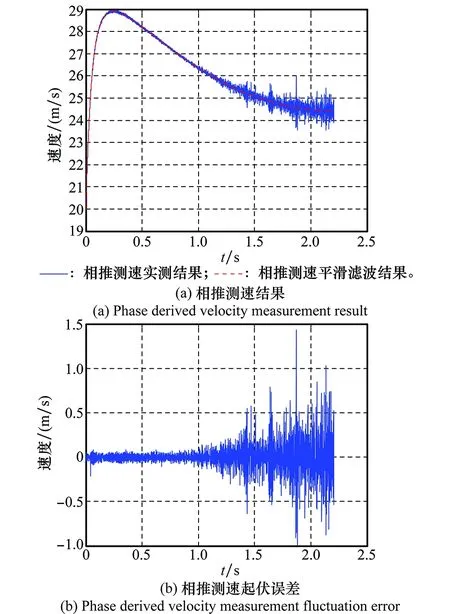
图10 相推测速结果与测速起伏误差示意图Fig.10 Schematic diagrams of phase derived velocity measurement result and fluctuation error
同上,根据相推原理,可推得相推测距均方根误差,即当信噪比大于30 dB时,相推测距均方根误差为0.048 mm,当信噪比大于20 dB时,相推测距均方根误差为0.21 mm。
4.3 相参ISAR成像能力
基于合成宽带PD雷达良好的相参性能,提出了一种基于相推测速的ISAR成像运动补偿方法,该方法结合距离像互相关测速和相推技术,可以获得高精度的平动速度测量结果,其测量精度同时满足ISAR成像包络对齐和相位校正的精度要求,能够实现精确运动补偿,在小转角情况下,再结合距离-多普勒算法就可以获得高质量的ISAR图像。
下面分析波音777(Boeing 777-200)飞机的回波数据,该飞机的机身长为63.73 m,翼展为60.93 m,录取场景为飞机即将降落,此时飞机距机场约为20 km。飞机随时间变化的一维距离像如图11所示,图中共绘出了1 024帧一维距离像,飞机由远及近飞向雷达。
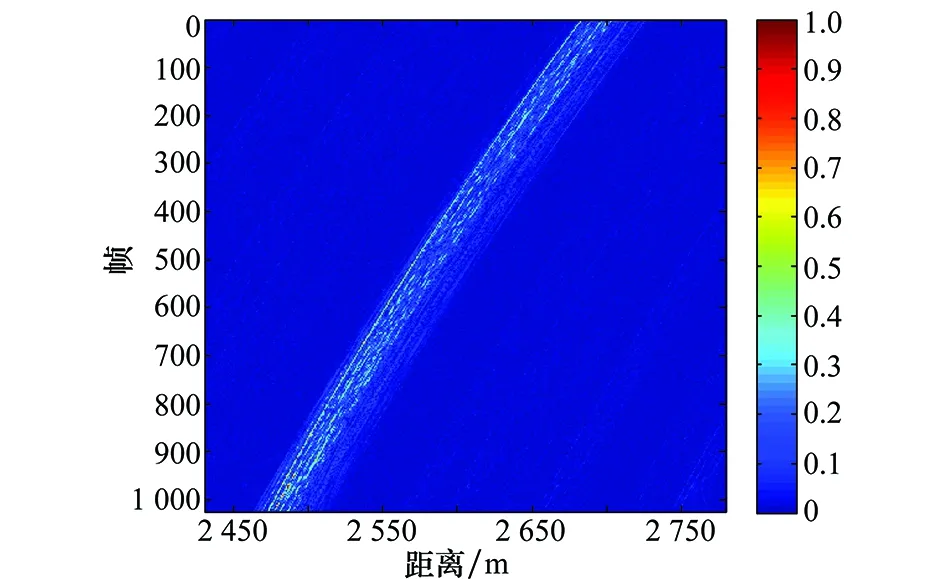
图11 飞机一维高分辨距离像Fig.11 HRRPs of the airplane
基于距离像互相关的相推测速结果如图12所示,滤波前后结果之差视为相推测速起伏误差,如图12(b)所示,统计可得相推测速的起伏均方根误差为0.061 m/s。同第4.2节分析,可知平滑滤波相当于对回波进行非相参积累,可以进一步提高速度测量精度,故将平滑滤波结果用于飞机回波的包络对齐和相位校正处理。
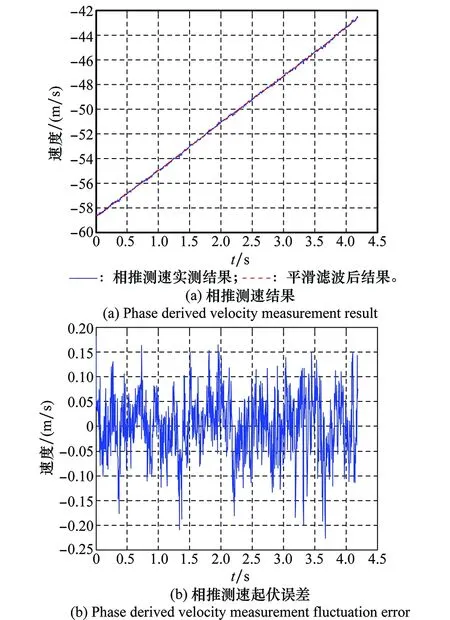
图12 相推测速结果与测速起伏误差示意图Fig.12 Schematic diagrams of phase derived velocity measurement result and fluctuation error
飞机的ISAR成像结果如图13所示,其中图13(a)~图13(c)分别为飞机飞向雷达、与雷达视线近似垂直和远离雷达时的ISAR图像,从图中可看到清晰的飞机轮廓,包括飞机机头、机翼、机尾以及发动机;同时由这3张图可以判断,该飞机有两个发动机,且当飞机飞向雷达时,每个发动机存在不止一个散射点;当飞机与雷达视线近乎垂直时,发动机仅存在一个强散射点;当飞机远离雷达时,发动机回波被遮挡。
图13(b)中飞机近似与雷达垂直,故以其为例分析ISAR图像中飞机尺寸。飞机ISAR成像积累时长为1.048 6 s,录取时刻飞机速度约为400 km/h,飞机距雷达2 280 m,则飞机转角近似为2.92°,因此横向分辨率约为0.891 m,由图13(b)可知其方位向占据第97~162个分辨单元,故飞机横向尺寸约为58.8 m,又由图(b)可知飞机在纵向尺寸约为56 m。飞机横向与纵向尺寸分别对应其机长和翼展,可知测量结果与飞机真实尺寸近似相符。
综上,ISAR图像可以用于估计目标尺寸,为目标识别提供参考信息;同时合成宽带PD雷达回波相参,基于距离像互相关的相推测速方法可以充分利用ISAR成像时间内全部回波的信息,相当于进行了整体回波最优处理,测量结果不存在积累误差,因此该方法适用于较低信噪比环境,根据飞机回波数据,可知飞机各散射点回波幅度相差较大,若定义信噪比为脉压后一维距离像中最强散射点处的信噪比,则根据实测数据统计,可知该方法适用的最低信噪比约为15 dB。
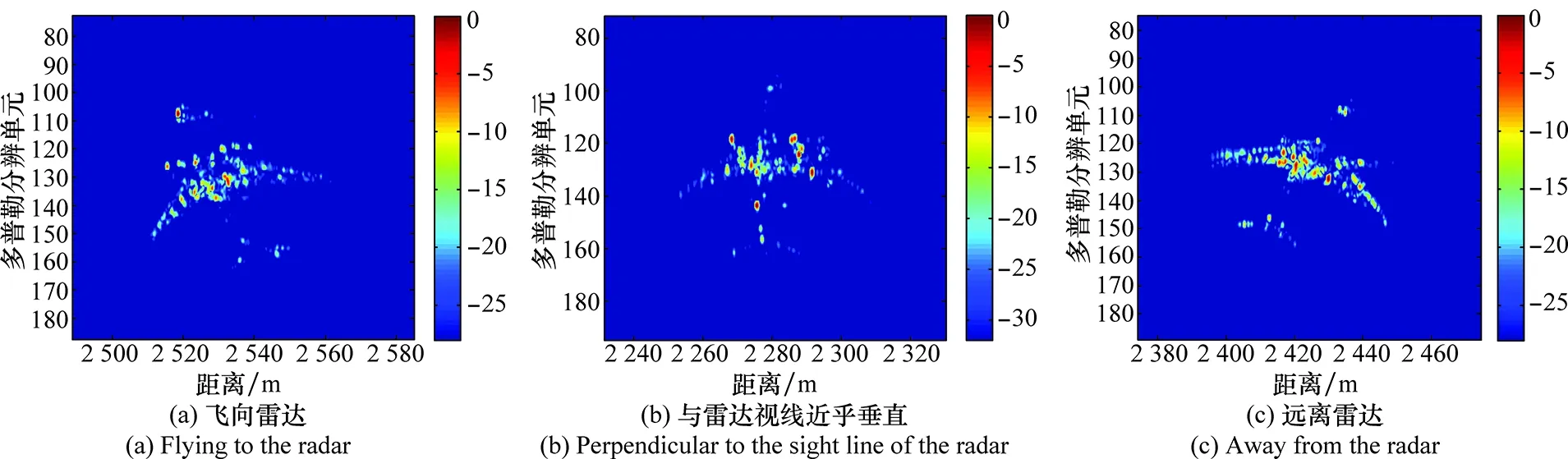
图13 飞机ISAR成像结果Fig.13 ISAR imaging results of the airplane
5 结 论
合成宽带PD雷达可以同时实现距离和速度二维高分辨,具有较强的抗杂波和抗干扰性能;此外,微动提取和ISAR成像均可为目标识别提供重要的参考信息。本文通过音叉振动实验、角反射器位移实验、单摆实验,验证了合成宽带PD雷达的微动测量能力;通过弹射钢球实验,验证了合成宽带PD雷达在强杂波中检测运动小目标的能力,以及高精度相推测距测速性能,其中相对距离的测量精度达到了亚mm或mm量级,测速精度达到了cm/s或亚m/s量级;通过民航飞机实验,验证了合成宽带PD雷达对复杂目标的高精度相推测速能力,以及相参ISAR成像能力;上述实验均验证了合成宽带PD雷达良好的相参性能,为其工程化应用奠定了坚实的基础。
合成宽带PD雷达是下一代新体制雷达发展的重要方向,该体制雷达可应用于地面对空情报雷达、预警机雷达、战场侦察及地面火控雷达等。
[1] Liu H B, Lu J D. Target motion compensation algorithm based on keystone transform for wideband pulse Doppler radar[J].TransactionsofBeijingInstituteofTechnology, 2012, 32(6): 625-630.(刘海波,卢俊道.基于Keystone变换的宽带脉冲多普勒雷达目标运动补偿算法[J].北京理工大学学报,2012,32(6):625-630.)
[2] Wehner D R.High-resolutionradar[M]. 2nd ed. Boston: Artech House, 1995: 197-237.
[3] Huang M, Long T. Design and realization of the kind of step frequency and pulse Doppler complex processing[J].JournalofProjectiles,Rockets,MissilesandGuidance, 2005, 25(1): 72-75.(黄默,龙腾.一种步进频率和PD复合体制的信号处理技术[J].弹箭与制导学报,2005,25(1):72-75.)
[4] Long T, Li D, Wu Q Z. Design methods for step frequency waveform and the target pick-up algorithm[J].SystemsEngineeringandElectronics,2001,23(6):26-31.(龙腾,李眈,吴琼之.频率步进雷达参数设计与目标抽取算法[J].系统工程与电子技术,2001,23(6):26-31.)
[5] Lord R T. Aspects of stepped-frequency processing for low-frequency SAR systems[D]. Cape Town: University of Cape Town, 2000.
[6] Berizzi F, Martorella M, Bernabo M. A range profiling technique for synthetic wideband radar[J].IEEERadarSonarNavigation, 2008, V2(5): 334-350.
[7] Sitler K L, Temple M A, Novack R C. High range resolution profiling using phase-coded, stepped-frequency waveforms[J].ElectronicsLetters, 2002, 38(1):46-48.
[8] He Y. Study on the coded multi-modulation signal analysis and processing[D]. Changsha: National University of Defense Technology, 2009. (何元. 编码复合调制信号分析与处理技术研究[D]. 长沙: 国防科技大学, 2009.)
[9] Zhang H G, Fan H Y, He S H, et al. Multi-subpulse process of large time-bandwidth product chirp signal[J].JournalofBeijingInstituteofTechnology, 2015, 24(4):501-507.
[10] Li Y, Zeng T, Long T, et al. Range migration compensation and Doppler ambiguity resolution by keystone transform[C]∥Proc.oftheInternationalConferenceonRadar, 2006:1-4.
[11] Myers H, Moore R, Butler W, et al. Common aperture multiband radar (CAMBR)[C]∥Proc.oftheRadarProcessing,Technology,andApplications, 1996, V2845:2-13.
[12] Myers H, Moore R, Butler W, et al. Common aperture multiband radar (CAMBR)[C]∥Proc.oftheIEEENationalRadarConference, 1997: 143-148.
[13] Bao Y X, Mao E K, He P K, et al. Clutter cancellation and high resolution processing in HPRF stepped-frequency radar[J].ModernRadar, 2009, 31(1): 58-61. (包云霞, 毛二可,何佩琨, 等. 高重频频率步进雷达的杂波抑制和高分辨处理[J]. 现代雷达, 2009, 31(1): 58-61.)
[14] Merrill I S.Introductiontoradarsystems[M]. 3rd ed. Beijing: Publishing House of Electronics Industry, 2007: 427-430.
[15] Fan H Y, Ren L X, Mao E K. A micro-motion measurement method on wideband radar phase derived ranging[C]∥Proc.oftheIETRadarConference, 2013: 1-4.
[16] Liu Y X, Zhu D K, Li X, et al. Micromotion characteristic acquisition based on wideband radar phase[J].IEEETrans.onGeoscienceandRemoteSensing, 2014, 52(6): 3650-3657.
[17] Huang C, Ren L X, Mao E K. Design of a time delayed receiver local oscillator in stepped-frequency radar[C]∥Proc.oftheIETRadarConference, 2009: 1-4.
[18] Ren L X, Long T, Yuan H P. Signal processing and parameter design of HPRF pulsed-Doppler stepped-frequency radar[J].ActaElectronicaSinica, 2007, 35(9): 1630-1636. (任丽香, 龙腾, 远海鹏. HPRF脉冲多普勒频率步进雷达信号处理与参数设计[J]. 电子学报, 2007, 35(9): 1630-1636.)
[19] Fritz S. An improved process for phase-derived-range measurements[P]. World Intellectual Property Organization Patent, 2005.
[20] Fritz S.Process for phase-derived-range measurements[P].U.S.Patent,US 7046190 B2, 2005-2-10.
Synthetic wideband pulse Doppler radar
MAO Er-ke1,2, FAN Hua-yu1,2
(1.BeijingKeyLaboratoryofEmbeddedReal-timeInformationProcessingTechnology,BeijingInstituteofTechnology,Beijing100081,China; 2.RadarResearchLab,SchoolofInformationandElectronics,BeijingInstituteofTechnology,Beijing100081,China)
The synthetic wideband pulse Doppler (PD) radar can simultaneously achieve high range and velocity resolution. And it has good performance of coherence, so high range and velocity measurement precision can be achieved by using the phase derived principle and it can be applied to micro-motion measurement of complex targets with multi-components. Besides, it has good performance of anti-clutter and anti-jamming. In this paper a synthetic wideband PD radar system and its main signal forms are presented; the principle of achieving high range and velocity resolution is introduced; moreover, the main properties of the synthetic wideband PD radar are summarized; finally, the abilities of the synthetic wideband PD radar, including the abilities of micro-motion measurement, precise range and velocity measurement and coherent ISAR imaging, are verified by a series of experiments.
synthetic wideband signal; pulse Doppler (PD) radar; high range and velocity resolution; anti-clutter; anti-jamming; micro-motion measurement
2016-04-27;
2016-07-14;网络优先出版日期:2016-08-22。
国家自然科学基金(61301189);高等学校学科创新引智计划(B14010)资助课题
TN 958
A
10.3969/j.issn.1001-506X.2016.12.06
毛二可(1934-),男,中国工程院院士,教授,博士研究生导师,主要研究方向为雷达系统、数字信号处理。
E-mail:maoerke@bit.edu.cn
范花玉(1989-),女,博士研究生,主要研究方向为合成宽带雷达信号处理。
E-mail:fan_huayu@sina.com
网络优先出版地址:http:∥www.cnki.net/kcms/detail/11.2422.TN.20160822.1008.010.html
