“潜龙”在渊
2016-12-22高峰
高峰
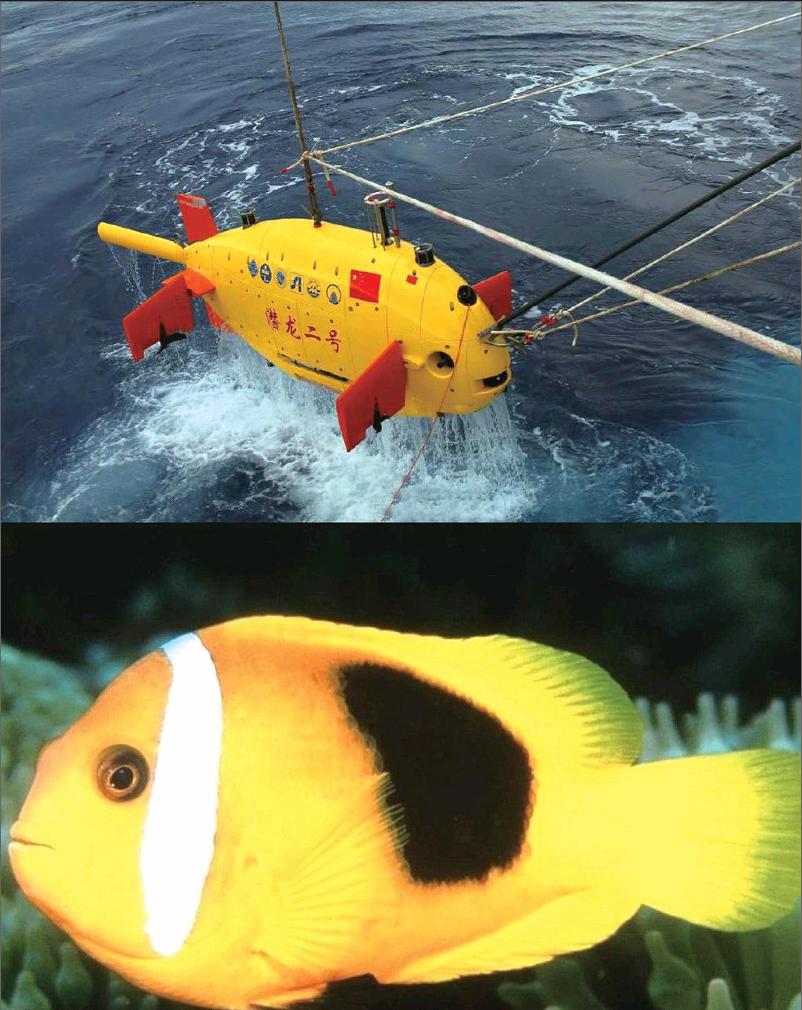

虽然它的名字里有个“龙”字,但是怎么看都像是电影《海底总动员》里的小丑鱼尼莫,不过它的本领可比小丑鱼大多了,因为它是一条科技含量颇高的“人造鱼”,全副武装,浑身宝贝,它就是“潜龙二号”,我国首台自主研发的4500米级自主水下机器人,2016年3月,它在西南印度洋圆满完成了中国大洋第40航次试验性应用任务,实现了中国深海科考的多个“首次”。
一条放大版的“热带鱼”
全身金黄,有鳍有尾巴,全长4.5米左右,活像一条放大版的“热带鱼”,这就是“潜龙二号”的真面目。一般来说,为了减少阻力,自主式潜水器大多设计成回转体式,像鱼雷艇一样。不过,这种造型主要适用于平坦的海底,如果遇到像印度洋海底这种凹凸不平的地形,就需要把潜器的外表做得扁扁的,以减少它垂直面的阻力,让潜器更容易回收。
“潜龙二号”这种造型还能让它具有很高的抗风浪能力,即使在风大浪高的海面上,它也可以像不倒翁一样“站立”,不会“翻肚皮”;而且,通过科学家用遥控器遥控,它还能在海面上简单地“游两圈”,向母船靠近。
全身上下都是宝
作为一条科技含量颇高的“人造鱼”,“潜龙二号”可谓全副武装,浑身宝贝。
首先,前后各配一对“鱼鳍”,这是它的推进器。这两对水平舵板就像鱼的鳍一样,确保潜器平衡。垂直的舵则像鱼的背鳍,这是为了让它在水中更自由地航行。
其次,“鱼嘴”处安装了一个前视声呐,这让潜器能看到前方的物体。那么,左右的物体怎么看呢?可以用装在“鱼眼”部位的水平槽道推进器,先让潜器左右移动,再用“鱼嘴”处的前视声呐看。它的这种“看”主要是获得海底地形地貌的连续数据,再把数据还原成图像。当然,要真正读懂这些数据,需要回到母船后,由技术人员对这些数据进行深入处理,以得到精细的图像。
再次,1米长的“尾巴”上安装了海底探测磁力仪。用它就能知道扫过的地区有没有不活动的热液硫化物矿,有多少,三维结构如何等。
“潜龙二号”还配有一台照相机,由于海底伸手不见五指,相机还配备了闪光灯,可以每隔7秒钟拍摄一张照片。每张照片都会与前后照片有20%的重合,以保证拍摄的“无缝衔接”,最终经过处理,可以形成一张完整清晰的海底图片。
“潜龙二号”身上的各种环境传感器是它的“耳朵”,一系列智能算法是它的“大脑”。此外,它还随身带了一些小物件,比如与母船联络的声通讯机、确定海底位置的长基线信标和频闪灯、天线等。
“人造鱼”,出发啦
作为我国首台自主研发的4500米级自主水下机器人,“潜龙二号”的智能化水平非常高,这让它的海底之旅变得非常顺利。
第一步是入水。操作人员通过吊车把“潜龙二号”放到水中,解除它和吊车之间的联系后,它就开始自己往指定区域下潜。如何下潜呢?一方面,“潜龙二号”自身有重力;另一方面,它配有一块重约25千克的压载铁。有了这块压载铁,潜器下潜的速度可达每分钟40米。
第二步是遨游。这要依靠它的“鱼鳍”和“鱼眼”处的推进器。依靠它们,“潜龙二号”可以垂直升降、前进、后退,还能旋转。当然,推进器的动力来源要靠电池。“潜龙二号”配有可运行30小时左右的一次性电池组和运行10小时的可充电式电池组。
在遨游过程中,“潜龙二号”会用它身上带的声呐、照相机、热液异常探测系统等宝贝,对事先规划好的区域进行拍摄或扫描。
旅程中不可能一帆风顺,如果遇到复杂的地形地貌,“潜龙二号”会主动避险,这靠的是它“鱼嘴”处的前视声呐。解除危机后,“潜龙二号”会自动回到原先规划的线路继续航行。
那么,途中遇到一些磕磕碰碰,某个地方碰坏了怎么办呢?“潜龙二号”还会自己“看病”——通过集成的大量传感器和执行机构,对损坏程度进行自我检测,并根据故障的等级采取不同的应对方案。如果坏的地方影响任务,潜器就会自动结束作业上浮回来;如果故障轻微,不妨碍作业,则可暂时带“病”工作。
第三步是上浮。任务完成后,“潜龙二号”会自动抛掉压载铁,让潜器重量小于海水浮力,顺利上浮。
第四步是回收。当“潜龙二号”上浮至海面后,它搭载的定位系统会自动将位置发送给母船。操作人员可以用遥控器控制推进器,让它慢慢“游”到母船周围,再通过挂钩或抛绳回收到母船上。至此,“潜龙二号”的一次海底遨游之旅就算是完成了。
