基于T-S模糊模型的观测器和动态输出反馈容错控制器设计
2016-12-22朱芳来蒋鹏李晓航
朱芳来,蒋鹏,李晓航
(同济大学电子与信息工程学院,201804,上海)
基于T-S模糊模型的观测器和动态输出反馈容错控制器设计
朱芳来,蒋鹏,李晓航
(同济大学电子与信息工程学院,201804,上海)
针对具有执行器故障和传感器故障的非线性系统,提出了一种基于T-S模型的观测器设计和动态输出反馈控制器设计方法。首先,将非线性系统转化为T-S模型,以此模型作为设计模型,利用扩展传感器故障为辅助状态向量的方式,将系统扩展为增维的T-S描述系统;然后,针对增维的T-S描述系统,设计模糊自适应观测器以达到对非线性系统的状态、执行器和传感器故障同时估计的目的;最后,基于观测器对传感器和执行器故障的估计,设计了一种动态输出反馈容错控制器以达到容错控制的目的,其中以线性矩阵不等式的方式给出了观测器和容错控制器存在的充分性条件。通过实例仿真验证了该文设计方法的有效性。
自适应观测器;容错控制;T-S模型;执行器故障重构;传感器故障重构
在实际控制系统中,故障的出现会导致系统不稳定或系统损坏,因此对故障诊断和容错控制的研究成为控制领域中的热点问题[1-2],其中对于非线性系统容错控制器的设计成为一个具有挑战性的课题[3-4]。
由于T-S模型结构简单,且能以任意精度逼近任何一光滑非线性函数,因而结合T-S模糊模型和线性系统设计方法来解决非线性问题的思路受到学者们的关注[5-9]。例如,文献[5]针对非线性动态系统将高阶滑模观测器扩展为T-S模糊模型方法,提出了一种传感器故障检测与隔离问题的解决方案。文献[6]针对具有传感器故障的模糊随机系统,设计了鲁棒观测器进行故障估计,同时还提出了基于观测器的模糊容错控制方案。文献[7]通过不同观测器给出的状态估计得出加权估计状态,并基于状态估计进行了容错控制器设计。文献[8]通过对k-1步故障的估计,得出第k步的误差动态方程,并以此提出了故障估计方法和容错控制器设计方案。文献[9]对具有多个执行器故障的非线性不确定系统,设计了自适应容错控制器。但是,自适应故障诊断观测器通常仅适用于发生定值故障的系统[10],且很难处理带有传感器故障的不确定性系统[11]。文献[1-2]只考虑了线性系统的故障估计,文献[3-5,9,11]考虑的系统只有执行器故障而未考虑传感器故障的存在,具有执行器故障和传感器故障的非线性系统观测器和容错控制器的设计少有报道。
本文针对T-S模糊系统,在同时具有执行器故障和传感器故障的情况下,提出了一种模糊自适应观测器设计来同时估计非线性系统的状态、执行器故障和传感器故障的方法,同时还提出了基于观测器的动态输出反馈容错控制器设计方法。
1 T-S模型构造
考虑一类非线性系统模型
(1)
式中:x∈Rn、y∈Rp、u∈Rm分别为状态、可测输出和控制输入向量;fa∈Rr、fs∈Rw分别为执行器故障和传感器故障;φ为非线性项;B∈Rn×m、D∈Rn×r、C∈Rp×n和E∈Rp×w为相应维数的矩阵。假设D、E为列满秩矩阵。
考虑T-S模糊模型
构造T-S模型
(2)


引理1[13]假设φ是连续可微的函数,且φ(0)=0。对于任意的εφ>0,式(2)所示的T-S模糊系统可近似描述式(1),近似误差为
2 鲁棒观测器设计
(3)
如果式(3)存在鲁棒观测器,那么可同时估计出系统状态x和传感器故障fs。设计鲁棒观测器,即
(4)

文献[14]在执行器故障调节估计中是基于系统输出微分信号的,而式(4)中对执行器故障进行估计时只用到了输出估计误差。系统的微分信号不易得到,且如果在设计中使用了系统输出微分信号,则容易产生高频噪声,给设计带来不确定性。
引理2 矩阵G∈R(n+w)×n、F∈R(n+w)×p满足
(5)
如果令
(6)
(7)
如果令Ki=Li+NiF,则式(6)可表述为
(8)
Li=Ki-NiF∈R(n+w)×p
(9)
引理3 对任意的矩阵Ki∈R(n+w)×p,由式(8)、(9)所确定的矩阵Ni、Li都是式(6)的解。
根据式(4),故障估计误差可动态表述为
(10)
(11)

定义

(12)
定理1 如果线性矩阵不等式
(13)


定义Dr={γ∈C||γ|<α,Re(γ)<β},并应用文献[15]所提D型稳定,可得约束方程
(14)

3 容错控制器设计
基于观测器的设计,在一定假设下提出一种动态输出反馈容错控制设计方法,可使得系统的稳定性在该容错控制器下得到保证。

钾肥市场高位坚挺运行,小单成交为主。国产钾方面,盐湖装置正常生产,日产量在14000吨左右,每日发运量200-300车,盐湖库存量有所下降,目前基准产品60%粉晶执行价格2350元/吨,目前地区成交价在2150-2200元/吨,后期价格或仍有上行可能。青海小厂开工维持低位,不少小厂仍处于处于关停状态。进口钾方面,近期到船量较少,市场限售持续,市场按需小单成交为主,价格挺价探涨,参考主流报价62%俄白钾港口价2350元/吨左右,约旦以色列白钾2300元/吨左右,实际成交单议为主。边贸市场近期到货量较少,市场供应量持续紧俏,少有可售现货,62%白钾报价在2100元/吨左右。
(15)
(16)
式中:ξ(t)∈Rn为控制器的状态向量。将式(16)代入式(2),得
(17)

(18)
其中

(19)
(20)
可得鲁棒H∞动态输出反馈控制器的参数矩阵为
(21)
BKjCXM-T-N-1YBCKj
M,N∈Rn×n满足MNT=In-XY。
本文设计方法原理如图1所示。
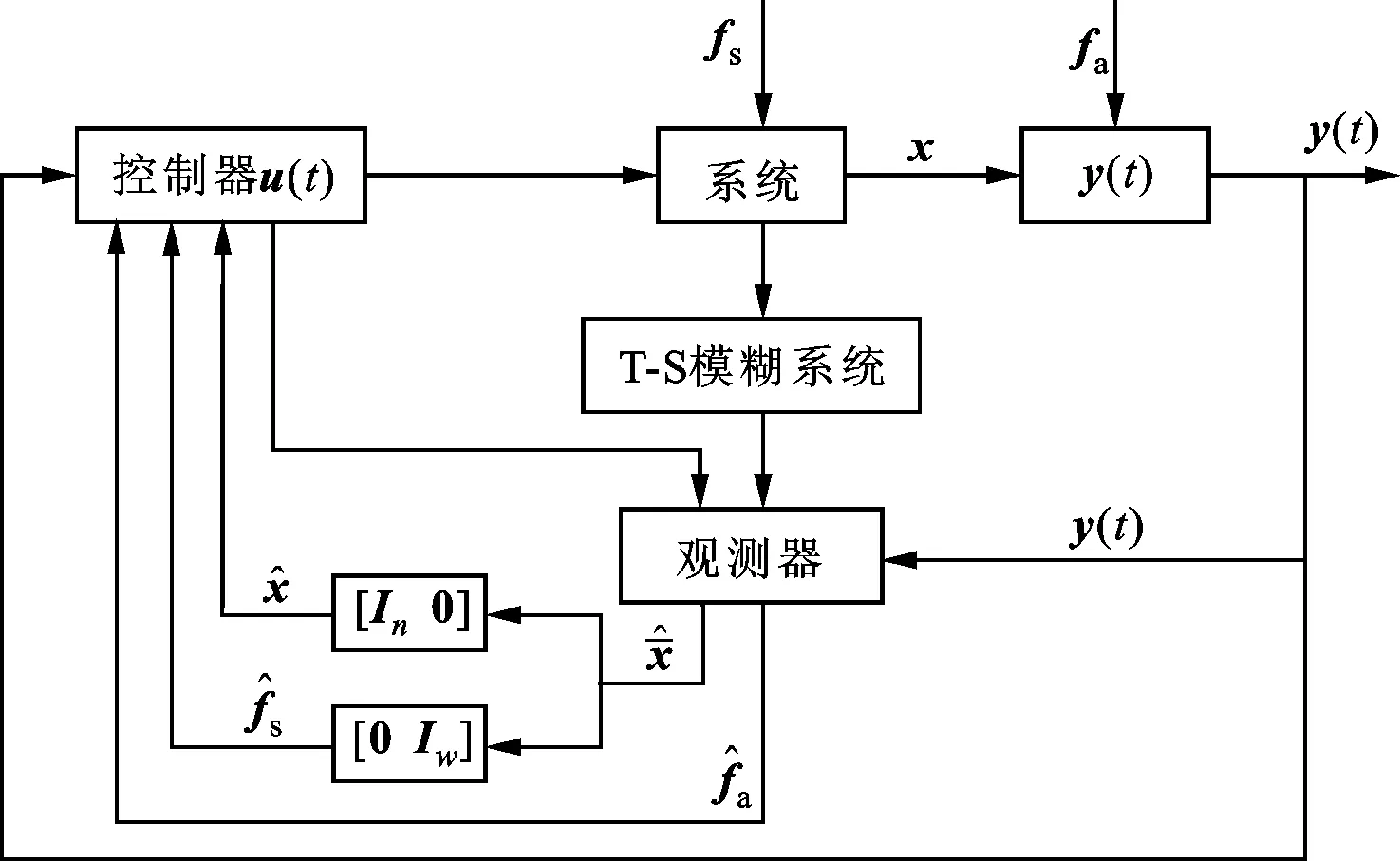
图1 观测器和容错控制器原理
4 仿真分析
倒立摆系统是研究控制理论的实验平台,由于与火箭飞行及两足机器人行走有很大的相似性,因而对倒立摆的研究具有一定的意义。
考虑由直流电机驱动的如图2所示的倒立摆[17-18],系统状态空间可表述为
(22)
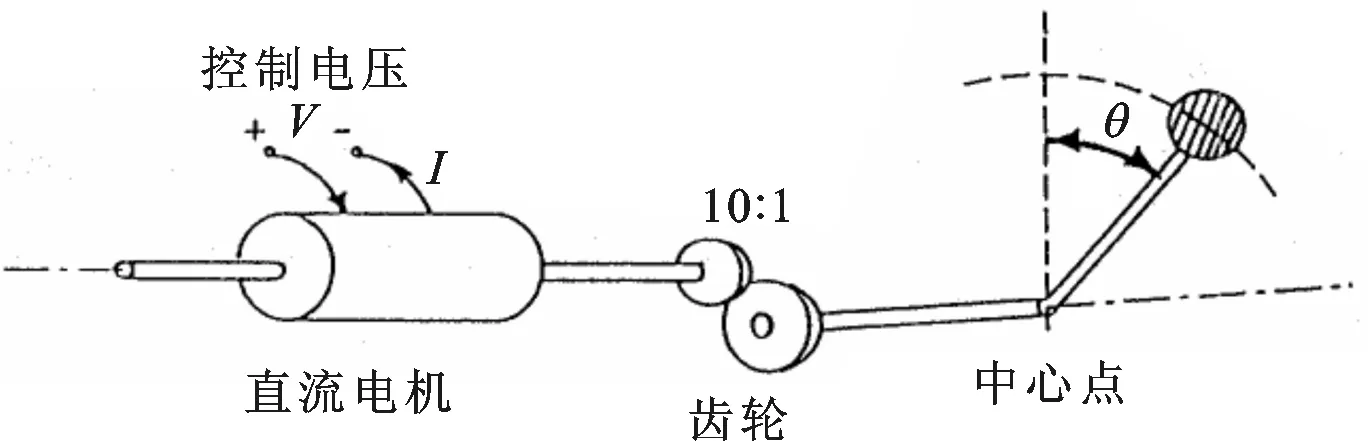
图2 倒立摆示意图
式中


通过求解式(13),可得
由式(8)、(9)可得
求解式(19)、(20),可得容错控制器参数矩阵
系统状态估计如图3所示,传感器故障和执行器故障的重构如图4、5所示。

图3 容错控制下的状态及状态估计

图4 传感器故障fs的重构
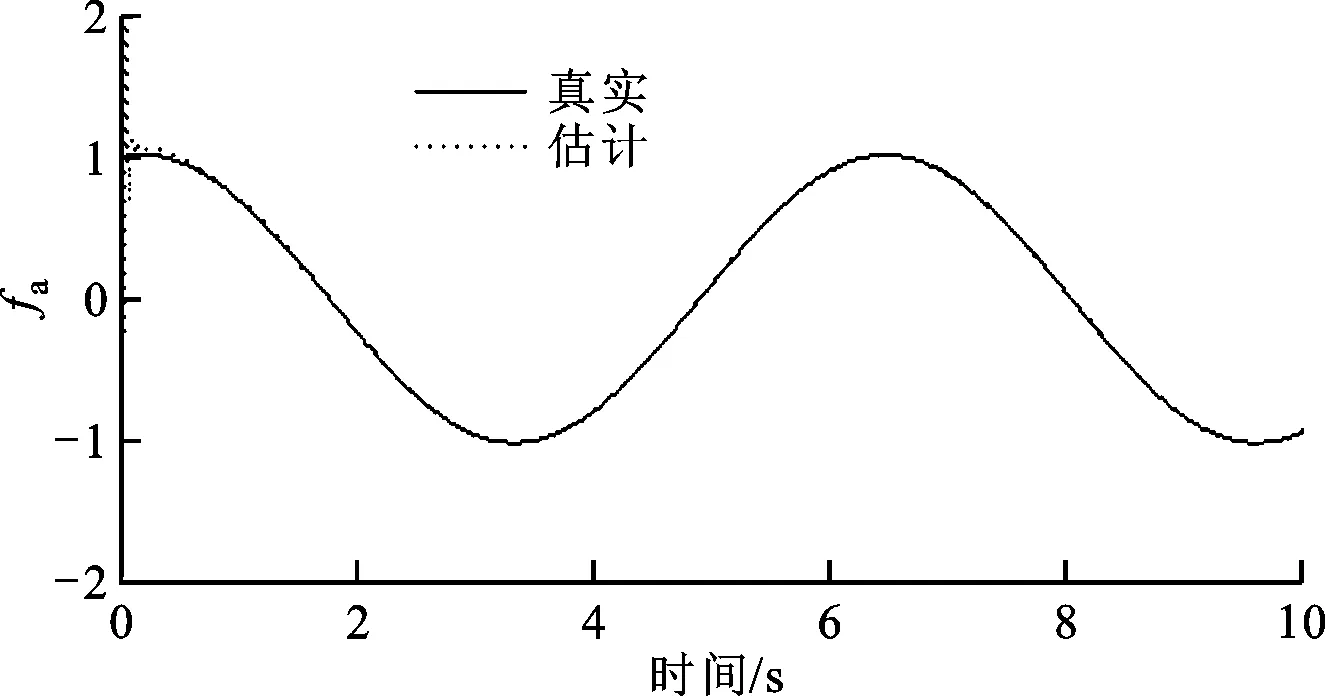
图5 执行器故障fa的重构
5 结 论
本文基于T-S模糊模型,对具有传感器故障和执行器故障的非线性系统,提出了一种鲁棒自适应观测器设计方法,达到了对非线性系统状态、执行器故障和传感器故障同时估计的目的。此外,基于设计的观测器,提出了一种动态输出反馈容错控制器设计方法,以达到容错控制的目的。利用线性矩阵不等式,给出了观测器和容错控制器存在的充分性条件。仿真结果验证了所提方法对非线性系统的有效性。
[1] CHEN J, PATTON R J. Robust model-based fault diagnosis for dynamic systems [M]. New York, USA: Springer Publishing Company, 2012.
[2] 杨俊起, 张良, 朱芳来, 等. Lipschitz非线性系统未知输入观测器设计 [J]. 西安交通大学学报, 2013, 47(8): 87-92. YANG Junqi, ZHANG Liang, ZHU Fanglai, et al. Design of observer with unknown input for Lipschitz nonlinear systems [J]. Journal of Xi’an Jiaotong University, 2013, 47(8): 87-92.
[3] EDWARDS C, SPURGEON S K, PATTON R J. Sliding mode observers for fault detection and isolation [J]. Automatica, 2000, 36(4): 541-553.
[4] YAN X G, EDWARDS C. Adaptive sliding-mode-observer-based fault reconstruction for nonlinear systems with parametric uncertainties [J]. IEEE Transactions on Industrial Electronics, 2008, 55(11): 4029-4036.
[5] HAOUARI F A, DJEMAI M, CHERKI B. Sliding mode observers for T-S fuzzy systems with application to sensor fault estimation [C]∥Proceedings of the 3rd International Conference on Control, Engineering & Information Technology. Piscataway, NJ, USA: IEEE, 2015: 1-5.
[6] LIU M, CAO X, SHI P. Fault estimation and tolerant control for fuzzy stochastic systems [J]. IEEE Transactions on Fuzzy Systems, 2013, 21(2): 221-229.
[7] LCHALA D, MARX B, RAGOT J, et al. Sensor fault tolerant control of nonlinear Takagi-Sugeno systems: application to vehicle lateral dynamics [J]. International Journal of Robust and Nonlinear Control, 2015, 26(7): 1376-1394.
[8] HUANG Shengjuan, YANG Guang hong. Fault tolerant controller design for T-S fuzzy systems with time-varying delay and actuator faults: ak-step fault-estimation approach [J]. IEEE Transactions on Fuzzy Systems, 2014, 22(6): 1526-1540.
[9] YANG Qinmin, SAM GE Shuzhi, SUN Youxian. Adaptive actuator fault tolerant control for uncertain nonlinear systems with multiple actuators [J]. Automatica, 2015, 60: 92-99.
[10]JIANG Bin, WANG Jianliang, SOH Y C. An adaptive technique for robust diagnosis of faults with independent effects on system outputs [J]. International Journal of Control, 2002, 75(11): 792-802.
[11]JIANG B, STAROSWIECKI M, COCQUEMPOT V. Fault accommodation for nonlinear dynamic systems [J]. IEEE Transactions on Automatic Control, 2006, 51(9): 1578-1583.
[12]TEIXEIRA M, ZAK S. Stabilizing controller design for uncertain nonlinear systems using fuzzy models [J]. IEEE Transactions on Fuzzy Systems, 1999, 7(2): 133-142.
[13]GAO Qing, ZENG Xiaojun, FENG Gang, et al. T-S-fuzzy-model-based approximation and controller design for general nonlinear systems [J]. IEEE Transactions on Systems, 2012, 42(4): 1143-1154.
[14]ZHANG J, SWAIN A K, NGUANG S K. RobustH∞adaptive descriptor observer design for fault estimation of uncertain nonlinear systems [J]. Journal of the Franklin Institute, 2014, 351(11): 5162-5181.
[15]LEE D J, PARK Y. RobustH∞sliding mode descriptor observer for fault and output disturbance estimation of uncertain systems [J]. IEEE Transactions on Automatic Control, 2012, 57: 2928-2934.
[16]ZHANG Ke, JIANG Bin, LIU Jingjin. Fast fault accommodation of control systems by using adaptive observer [J]. Control and Decision, 2008, 23(7): 771-775.
[17]KAWAMOTO S. Nonlinear control and rigorous stability analysis based on fuzzy system for inverted pendulum [C]∥Proceedings of the 5th IEEE International Conference on Fuzzy Systems. Piscataway, NJ, USA: IEEE, 1996: 1427-1432.
[18]KAZUO T, TAKAYUKI L, HUA O W. Fuzzy regulators and fuzzy observers: relaxed stability conditions and LMI-based designs [J]. IEEE Transactions on Fuzzy Systems, 1998, 6(2): 250-265.
[本刊相关文献链接]
孙泽宇,伍卫国,曹仰杰,等.无线传感器网络中能量均衡参数可控覆盖算法.2016,50(8):77-83.[doi:10.7652/xjtuxb 201608013]
赵皓,高智勇,高建民,等.一种采用相空间重构的多源数据融合方法.2016,50(8):84-89.[doi:10.7652/xjtuxb201608 014]
潘艳芝,王栋,巩大利,等.一种计量稠油中油气水三相流的方法和装置研究.2016,50(7):140-144.[doi:10.7652/xjtuxb201607021]
郝维娜,令锋超,刘志刚,等.轴承滚珠面型误差激光干涉测量系统的研究.2016,50(6):83-89.[doi:10.7652/xjtuxb 201606013]
王悍枭,刘凌,吴华伟.改进型滑模观测器的永磁同步电机无传感器控制策略.2016,50(6):104-109.[doi:10.7652/xjtuxb201606016]
张平,张小栋,董晓妮,等.滑动轴承润滑油膜厚度光纤动态精密检测模型.2016,50(5):45-50.[doi:10.7652/xjtuxb 201605007]
杜鹏,卢义玉,汤积仁,等.新型直旋混合射流破岩特性及机理分析.2016,50(3):81-89.[doi:10.7652/xjtuxb201603013]
宋汝君,单小彪,李晋哲,等.压电俘能器涡激振动俘能的建模与实验研究.2016,50(2):55-60.[doi:10.7652/xjtuxb 201602010]
刘雅琳,上官博,徐自力.干摩擦阻尼对失谐叶盘系统受迫振动的影响.2016,50(2):111-117.[doi:10.7652/xjtuxb2016 02019]
权双璐,刘杰,韩罗峰,等.一种机械系统非线性类别辨识方法.2015,49(12):104-111.[doi:10.7652/xjtuxb201512017]
刘聪,李颖晖,刘勇智,等.采用高阶终端滑模观测器的执行器未知故障重构.2015,49(9):126-133.[doi:10.7652/xjtuxb201509021]
韩冬,刘俊.采用代数建模方法的自适应观测器设计.2015,49(7):88-91.[doi:10.7652/xjtuxb201507015]
张梦楠,徐洪泽.城轨列车反推自动停车控制算法.2014,48(9):136-142.[doi:10.7652/xjtuxb201409023]
(编辑 赵炜)
Design of Observer and Dynamic Output Feedback Fault Tolerant Controller Based on T-S Fuzzy Model
ZHU Fanglai,JIANG Peng,LI Xiaohang
(School of Electronics and Information Engineering, Tongji University, Shanghai 201804, China)
For the nonlinear systems with actuator and sensor faults, the design methodology of observer and dynamic output feedback controller based on T-S fuzzy model was discussed. Firstly, the nonlinear system was transformed into T-S fuzzy model. Then, taking the T-S fuzzy model as the design model, and extending the sensor faults to an auxiliary state to obtain an augmented T-S fuzzy descriptor system, a fuzzy adaptive observer was designed to achieve the simultaneous estimations of the states, the actuator faults and the sensor faults of the nonlinear system. In addition, the dynamic output feedback fault tolerant controller was designed to achieve the purpose of fault tolerance control based on the observer and estimate the sensor fault and actuator fault. Meanwhile, the sufficient conditions for the existence of the observer and fault tolerant controller were given in terms of the linear matrix inequalities. Finally, the effectiveness of the proposed methods was verified by a simulation example.
adaptive observer; fault tolerant control; T-S fuzzy model; actuator fault reconstruction; sensor fault reconstruction
2016-01-19。 作者简介:朱芳来(1965—),男,教授,博士生导师。 基金项目:国家自然科学基金资助项目(61074009)。
10.7652/xjtuxb201609015
TP273
A
0253-987X(2016)09-0091-06
