双轴旋转捷联惯导的误差参数标定方法
2016-12-22王昆明谢建周召发赵典
王昆明,谢建,周召发,赵典
(1.火箭军工程大学兵器发射理论与技术国家重点学科实验室,710025,西安;2.中国人民解放军96113部队,116105,辽宁大连)
双轴旋转捷联惯导的误差参数标定方法
王昆明1,谢建1,周召发1,赵典2
(1.火箭军工程大学兵器发射理论与技术国家重点学科实验室,710025,西安;2.中国人民解放军96113部队,116105,辽宁大连)
针对目前的双轴旋转调制捷联惯导系统误差标定方法参数标定不全、速度较慢的问题,提出一种新的双轴旋转调制捷联惯导系统误差参数标定方法,以实现全参数、快速标定,从而进行误差补偿以有效提升惯导系统导航精度。首先通过研究双轴旋转捷联惯导系统误差补偿的基本原理和系统机械结构,推导了初始时刻内、外轴处于任意角度情况下的陀螺误差方程;而后在对状态方程进行可观测性分析的基础上,设计了标定路径;最后通过滤波获取标定参数结果。该标定方法无需外部基准,仅通过系统自身旋转机构即可快速实现对陀螺误差全参数标定,弥补了之前方法只能标定部分参数的缺点,且有效缩短了标定时间,仿真结果表明,相比之前方法需要几十分钟的标定时间,该方法只要在6 min内即可实现陀螺全参数标定,是一种快速有效的标定方案。
捷联惯导系统;旋转调制;系统级标定;可观测性分析;全参数
捷联惯性导航系统(strapdown inertial navigation system,SINS)是一种自主导航定位系统,可以连续地提供包括姿态基准在内的全部导航参数,具有非常好的短期精度和稳定性,目前已被广泛应用于航天、航空、舰艇、导弹武器、地面车辆等载体上,但该系统的主要缺点是由于器件误差的存在,导致导航定位误差随时间而不断积累。解决这一问题的方法就是惯导系统误差标定技术。标定技术的目的是通过一定方法及设备来确定惯性器件的数学模型及其参数,而后根据标定结果对惯性器件误差进行补偿,从而有效地提高惯性系统导航定位精度。目前通常的标定方法是采用多轴转台或载体运动来提供误差激励。采用多轴转台,则惯组只能在实验室条件下进行标定;而采用载体运动激励,则要求载体必须以规定动作运动,不仅过程复杂,而且往往由于载体运动方式限制,导致只能标定部分误差[1]。
目前捷联惯导系统的一个重要趋势是旋转调制技术,通过增加转位机构,利用机构的旋转,实现部分器件误差的调制抵消。整体看来,惯性器件误差引起的导航姿态角误差和速度误差被调制成周期性震荡误差,而不会随着时间发散[2-4]。旋转调制捷联惯导增加了转位机构,就相当于提供了转台,这就使不依靠外界转台等条件而实现自主标定成为可能。对于单轴旋转调制系统,由于仅提供了一个旋转自由度,无法完全激励分离出所有误差参数,而双轴旋转捷联惯导系统内的双轴转位机构就相当于双轴速率转台,可以提供更多的姿态和角速度激励,从而实现惯性器件误差的全参数标定。这样一来,研究双轴旋转捷联惯导系统的自主标定方法,对于补偿减小惯性器件误差、提高系统导航定位精度从而最终提升载体定位性能就具有十分重要的意义。
近年来,针对双轴旋转捷联惯导系统的标定方法,国内外学者进行了很多研究:文献[5]提出一种双轴旋转捷联惯导八位置标定方法,可实现姿态未知条件下的误差标定,但其采用地球自转角速度来激励陀螺安装误差及标度因数,导致标定时间过长;文献[6]采用可观测性分析方法,对文献[5]类的八位置标定方法进行了优化,提升了标定速度;文献[7]提出了一种双轴旋转捷联惯导系统工程实现方案,并对其系统误差特性进行了分析及仿真,提出了一种系统级自标校方案,实现了部分误差的估计补偿;文献[8]分析了双轴旋转式SINS误差传播特性,并利用奇异值分解法对系统的可观测程度进行了分析,据此设计了系统的自主标定方案及滤波算法,但其无法标定与陀螺z轴相关的误差;文献[9]设计了一种双轴旋转调制系统多位置编排方案,可以标定除了3个安装误差外的所有其余误差,但其要求转位步骤多,方案编排较为复杂。
针对目前方法标定速度较慢、标定参数不全的问题,本文在上述文献基础上,推导了初始框架为任意角度下的双轴旋转捷联惯导陀螺误差公式,并据此建立了状态方程,通过可观测性分析提出了一种新的系统级标定方案,实现了全部陀螺参数的标定,最后通过仿真验证了方法的有效性。
1 坐标系定义
(1)导航坐标系(n系):该坐标系随地球的自转和载体的运动相对惯性系运动,本文采用东-北-天导航坐标系。
(2)载体坐标系(b系):该坐标系与基座固联,定义当转位机构位于转角零位时,Oxb与外环轴重合,Ozb与内环轴重合,Oxb指向基座的右方,Oyb与Oxb、Ozb成右手直角坐标系。
(3)惯性器件敏感坐标系(s系):该坐标系的原点位于惯性敏感元件中心,当转位机构位于转角零位时,s系与b系对应坐标轴重合。
(4)初始惯性器件敏感坐标系(s0系):初始时刻的惯性器件敏感坐标系。
2 双轴旋转捷联惯导系统陀螺的误差方程
双轴旋转捷联惯导系统一般采用如图1所示的机械结构。

图1 双轴旋转系统机械结构图[3]

(1)
式中:θsx、θsz分别为s系下外、内轴旋转角度,可通过测角机构测出。
定义陀螺输出角速度误差模型为[11-12]
(2)

(3)
(4)
(5)
对于旋转捷联惯导系统,有
(6)

将式(6)代入式(2),有
(7)


(8)
由于初始时刻双轴转位机构姿态一般不在转角零位,为不失一般性,考虑内、外轴处于任意角度下的情况。
(1)当惯组绕转位机构内轴旋转时,s系到b系的转换矩阵为
(9)

(10)

(11)

(12)
将式(12)代入式(8),可得
(13)
式中:X1=(-θgxysinθsx0+θgxzcosθsx0)cosθszωsz-(Kgysinθsx0ωsz-θgyzcosθsx0)sinθszωsz;X2=(-θgxysinθsx0+θgxzcosθsx0)sinθszωsz+(Kgysinθsx0ωsz-θgyzcosθsx0)cosθszωsz;X3=θgzysinθsx0ωsz+Kgzcosθsx0ωsz。
可见绕内轴旋转时,可以激励与y、z轴陀螺相关的误差系数,而无法激励与x轴陀螺相关的误差系数Kgx、θgyx、θgzx。这是由于系统绕内轴旋转时,惯组x轴方向上没有角速度输入,因而无法对相关误差实施激励。文献[7]相当于设定了初始时刻θsx0=0,则式(13)退化为文献[7]中式(6),导致与y轴陀螺相关的误差系数Kgy、θgxy、θgzy不可观测。故为保证参数可激励,应使sinθsx0值及cosθsx0值不为零或小值以避免无法标定或误差过大。
(2)当惯组绕转位机构外轴旋转时,有
(14)
(15)
(16)
式中:Y1=Kgxcosθsz0ωsx+θgxysinθsz0ωsx;Y2=(-Kgycosθsx+θgzysinθsx)sinθsz0ωsx+(θgyxcosθsx+θgzxsinθsx)cosθsz0ωsx;Y3=(-Kgysinθsx-θgzycosθsx)sinθsz0ωsx+(θgyxsinθsx-θgzxcosθsx)cosθsz0ωsx。
当系统绕外轴旋转时,与z轴陀螺相关的误差系数Kgz、θgxz、θgyz无法激励。为保证与x轴陀螺相关的误差系数可激励,应使θsz0值不为90°及270°以及二者附近的值。
可见,设定合理的初始角度情况下,惯组分别绕转位机构内、外轴旋转时,所有的陀螺参数都可以得到耦合。
综上,双轴旋转调制技术引入的旋转角速率可以有效激励陀螺安装误差和标度因数误差,静基座下,载体本身的角速率及零偏等对系统安装误差和标度因数误差的作用相对转位机构旋转角速率的作用很小,可以忽略。设置不同的初始角度和转位方案,可分别激励出3个陀螺的误差参数。
3 可观测性分析
系统级标定之前,为确保参数可标定,首先要进行可观测性分析,进而确定参数标定路径。接下来建立系统误差状态方程。
3.1 状态方程
本文主要考虑陀螺误差,对于加速度计,暂不考虑安装误差及标度因数误差,只考虑常值零偏,则加速度计输出误差可表示为
(17)
已知静基座条件下捷联惯导系统的姿态和速度误差模型为
(18)
(19)
根据上述的陀螺及加速度计误差模型,可得出捷联惯导系统15阶误差状态方程为

(20)
式中
X=[φEφNφUΔVEΔVNΔVUKgyKgz
(21)
其中φE、φN、φU为姿态误差角φ在东、北、天方向的分量;
(22)
其中
(23)
(24)
(25)
(26)
(27)
(28)
(29)
(30)
3.2 基于分段线性定常系统方法的可观测分析
可观测性分析是进行系统级标定的必要条件之一,只有保证误差状态量可观测,标定时卡尔曼滤波器才能收敛,而且收敛的时间和精度取决于系统的可观测度,可观测度越高,标定效果越好。此外,标定路径也是依据可观测性分析设计的。下面就根据分段线性定常系统(piece-wise constant system,PWCS)可观测性分析方法进行可观测性分析。
双轴旋转捷联惯导系统本质上是一个线性时变系统,通过PWCS分析方法,将系统在不同时间区间内看成是线性定常系统,并利用提取可观测矩阵(stripped observability matrix,SOM)对系统可观性进行分析,结果如下。
当惯组绕转位机构内轴旋转时,对SOM矩阵进行可观测性分析可知:在单一位置,匀速绕内轴旋转时,系统SOM矩阵的秩都为9,系统不完全可观;第2时间段,改变转速ωsz,则系统SOM矩阵的秩上升为12,仍不完全可观,且增加时间段,继续改变ωsz,SOM矩阵的秩保持12不变;若在上述基础上改变θsx0,则系统SOM矩阵的秩上升为15,系统完全可观。可见,通过设置内、外轴不同转位方式,即可实现对参数的估计。
这里要注意,若θsx0改变180°,则SOM矩阵的秩降为12,这可以从分析式(3)得出:θsx0改变180°,则式(3)中与y、z轴陀螺相关的误差系数大小不变,但符号同时改变,导致SOM矩阵对应行线性相关,矩阵的秩下降。为保证参数可观,θsx0改变量应避开180°及其附近值。采用相同分析方法,当惯组绕转位机构外轴旋转时,也可得出相同结论。
3.3 标定路径分析
由上述可观测性分析可以得出陀螺误差标定路径,以内轴为例说明如下。
首先控制内轴旋转,即提供转速激励,然后反向旋转,相当于改变转速ωsz,而后绕外轴转过一定角度,即改变θsx0,内轴继续保持正、反转,重复上述步骤直至误差得到估计,这样就完成了标定路径设计。
由于陀螺误差方程(3)、(6)中并不包含陀螺常值漂移ε,为将其标定出来,可利用双轴转位机构,采用二位置方法对其进行标定,标定方法如下。
对式(2)所得的陀螺安装误差进行补偿后,在静止位置有
(31)
绕内轴旋转时,令初始位置为位置1,内轴转过一定角度后停止于位置2,在位置1时,s0系到s系的姿态矩阵为
(32)
位置1的陀螺输出角速度为
(33)
在位置2时,s0系到s系的姿态矩阵为
(34)
位置2的陀螺输出角速度为
(35)
联立以上4式可解出陀螺常值零漂εx、εy分别为
(36)
(37)
同理,绕外轴旋转时,可解出陀螺常值零漂为
(38)
可见,根据式(36)~式(38),可由2个位置时的陀螺输出角速度计算出陀螺常值零漂。由于陀螺常值漂移很小,要适量延长陀螺采样时间,通过误差累加以提高标定精度。
4 系统级误差标定及仿真
4.1 标定方法
下面将根据双轴旋转调制惯导系统的实际情况,根据上节的标定路径,设计了一套外场条件下的系统级标定方案,标定过程如下:
(1)测定内、外轴初始角度值θsz0、θsx0,若为前述特殊角度范围,则控制转位机构转动相应转轴45°以避开范围,并以转位后的角度作为初始角度值;
(2)进行粗对准,约2 min;
(3)控制内轴转位机构进行匀速180°正反转,同时进行导航及标定滤波计算;
(4)内轴停转,静止10 min,进行陀螺零漂及加速度计零偏标定;
(5)外轴转位45°,转位时只进行导航计算;
(6)重复步骤3、5,直至完成相应参数标定;
(7)交换内、外轴转位方式,按照步骤3到6的顺序标定相应参数。
4.2 仿真标定及分析
为验证标定效果,采用MATLAB环境进行仿真标定。在仿真惯性器件信息之前,先对标定模型参数进行设置。地理纬度取为L=34.246°,重力加速度取为g=9.801 665 m/s2,为不失一般性,设置初始姿态角为(10°,20°,30°),内、外轴初始角度值θsz0=120°、θsx0=30°;初始姿态对准误差取中等精度惯组静基座对准误差(1′,1′,4′),加速度计零偏均设置为9.8×10-4m/s2,随机噪声均设置为9.8×10-5m/s2;陀螺零漂均设置为0.01(°)/h,随机噪声均设置为0.001(°)/h,安装误差及标度因数误差矩阵分别设置为
(39)
(40)
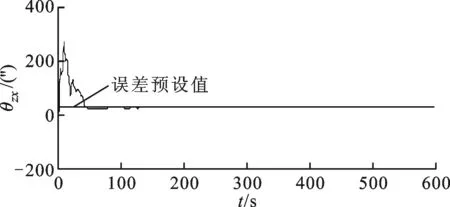
转位方式采用上节给出的方案,转速为1 r/min,通过仿真实验,给出了陀螺标误差估计曲线,结果分别如图2到图7中曲线所示,对比的直线为误差预设值。图2、图3为标度因数误差估计曲线,图4、图5为安装误差估计曲线,图6、图7为3个加速度计零偏估计曲线。

图2 Kgx误差估计曲线
所有参数具体的标定结果如表1所示。
由标定曲线可看出,加速度计零偏及陀螺标度因数误差标定效果较好,分别于100 s、200 s内即收敛到真值附近。陀螺安装误差收敛速度稍慢,也在350 s左右收敛至真值附近。相对于文献[7]中Kgz、θgxz、θgyz不可标定,本文设计的方法实现了陀螺全部参数的标定,相对于文献[5]中采用较小的地球自转角速度激励,导致每个固定位置停顿长达15 min,标定耗时过长,而本文方法采用转位机构转动激励,从而大大增强了激励效果,提升了标定速度。

(a)Kgy

(b)Kgz图3 Kgy、Kgz误差估计曲线

(a)θgxy (b)θgzy

(c)θgxz (d)θgyz 图4 θgxy、θgzy、θgxz、θgyz误差估计曲线

(a)θgyx
(b)θgzx图5 θgyx、θgzx误差估计曲线

图6 y、x误差估计曲线

(a)y、y

(b)y、z图7 y、z误差估计曲线
从表1可以看出,仿真值和真值相比,最大误差在7%以内,精度较高。
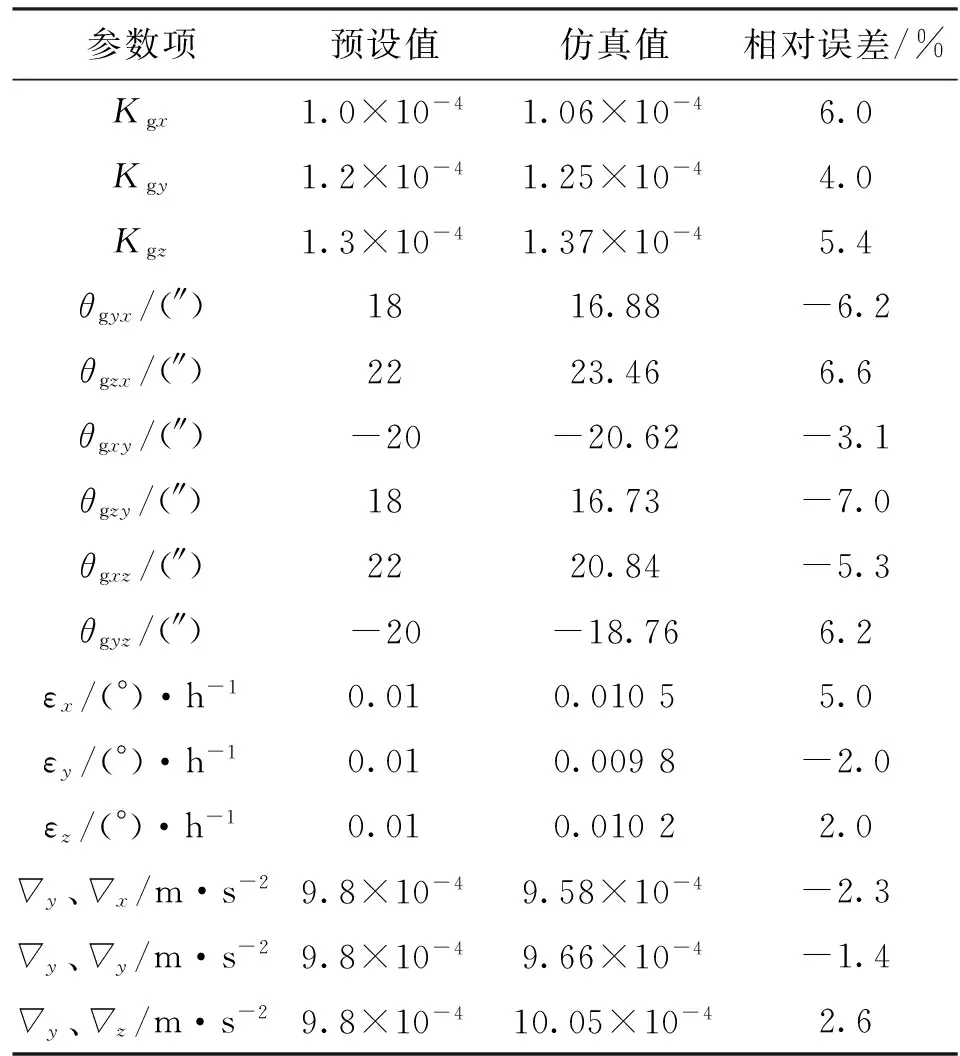
表1 标定结果
5 结 论
双轴旋转捷联惯导系统可由内部的双轴转位机构提供不同姿态,实现对惯性器件误差的充分激励,从而实现的自主标定。根据这一特点,本文在分析双轴旋转捷联惯导系统机械结构基础上,通过可观测性分析,设计了一种新的系统级标定方案,无需外部基准,通过系统自身旋转机构即可实现对陀螺全部参数的标定,具有较强的工程意义。本课题组下一步的工作重点是研究如何将本文方法具体应用到双轴旋转调制捷联惯导系统,解决滤波参数调整、抗干扰等问题,以实现外场条件下的陀螺误差快速自标定。
[1] 杨晓霞, 黄一. 利用ESO和TD进行的激光捷联惯组误差参数外场标定方法 [J]. 中国惯性技术学报, 2010, 18(1): 2-9. YANG Xiaoxia, HUANG Yi. Application of ESO and TD to outer field calibration of laser gyro SINS [J]. Journal of Chinese Inertial Technology, 2010, 18(1): 2-9.
[2] LEVISION E, TER H J, WILLCOCKS M. The next generation marine inertial navigator is here now [C]∥IEEE Position Location and Navigation Symposium. Piscataway, NJ, USA: IEEE, 1994: 121-127.
[3] LAHHAM J I, WIGENT D J, COLEMAN A L. Tuned support structure for structure-borne noise reduction of inertial navigator with dithered ring laser gyros (RLG) [C]∥IEEE Position Location and Navigation Symposium. Piscataway, NJ, USA: IEEE, 2000: 419-428.
[4] 袁保伦. 四频激光陀螺旋转式导航系统研究 [D]. 长沙: 国防科学技术大学, 2007: 71-80.
[5] 孙伟, 徐爱功, 孙枫. 双轴旋转光纤捷联惯导八位置标定方法 [J]. 控制与决策, 2012, 27(12): 1805-1809. SUN Wei, XU Aigong, SUN Feng. Calibration method of eight position for two-axis indexing fiber SINS [J]. Control and Decision, 2012, 27(12): 1805-1809.
[6] GAO Wei, ZHANG Ya, WANG Jianguo. Research on initial alignment and self-calibration of rotary strapdown inertial navigation systems [J]. Sensors, 2015, 15(2): 3154-3171.
[7] 陆志东, 王晓斌. 系统级双轴旋转调制捷联惯导误差分析及标校 [J]. 中国惯性技术学报, 2010, 18(2): 135-141. LU Zhidong, WANG Xiaobin. Error analysis and calibration of systematic dual-axis rotation-modulating SINS [J]. Journal of Chinese Inertial Technology, 2010, 18(2): 135-141.
[8] 黄凤荣, 侯斌, 孙伟强, 等. 双轴旋转式SINS自主标定技术 [J]. 中国惯性技术学报, 2012, 20(2): 146-151. HUANG Feng-rong, HOU Bin, SUN Wei-qiang, et al. Self-calibration for dual-axis rotary SINS [J]. Journal of Chinese Inertial Technology, 2012, 20(2): 146-151.
[9] 魏国. 二频机抖激光陀螺双轴旋转惯性导航系统若干关键技术研究 [D]. 长沙: 国防科学技术大学, 2013: 66-74.
[10]秦永元. 惯性导航 [M]. 北京: 科学出版社, 2006:
35-37.
[11]祝燕华, 蔡体菁. 旋转式光纤捷联惯导系统的误差效应分析 [J]. 中国惯性技术学报, 2011, 19(2): 140-144. ZHU Yan-hua, CAI Ti-jing. Error analysis of rotating strapdown inertial navigation system based on FOG [J]. Journal of Chinese Inertial Technology, 2011, 19(2): 140-144.
[12]李仁, 陈希军, 曾庆双. 旋转式捷联惯导系统误差分析 [J]. 哈尔滨工业大学学报, 2010, 42(3): 368-372. LI Ren, CHEN Xijun, ZENG Qingshuang. Error analysis of rotating strapdown inertial navigation system [J]. Journal of Harbin Institute of Technology 2010, 42(3): 368-372.
(编辑 刘杨)
A Calibration Method of Error Parameters for Dual-Axial Rotary Strapdown Inertial Navigation Systems
WANG Kunming1,XIE Jian1,ZHOU Zhaofa1,ZHAO Dian2
(1. State Key Discipline Laboratory of Armament Launch Theory and Technology, Rocket Force Engineering University, Xi’an 710025, China; 2. Unit 96113 of the PLA, Dalian, Liaoning 116105, China)
A new systematic calibration method is proposed to solve the problems that current modulate methods can only modulate parts of parameters of dual-axis rotary modulation strapdown inertial navigation systems and their speeds are slow, and to realize the fast self-calibration of all gyroscopes errors of dual-axis rotary modulation strapdown inertial navigation systems The method compensates errors to improve the accuracy of navigation systems. At first, it is based on the error compensation fundamental and mechanical structure of dual-axis rotation SINS that equations of gyroscopes errors are deduced when both the inside and outside axes are in any direction at initial time. Then, the calibration route is designed through observability analysis, and dimension error parameters are finally acquired by filter. The method can rapidly calibrate all gyroscopes errors by just using the self rotating mechanism without external standard. The method overcomes the shortages of existing methods that only calibrate part of all parameters, and cuts down calibration time effectively. Simulation results show that the method realizes the calibration of all parameters of gyroscopes errors just in 6 minutes while existing methods cost tens of minutes to calibrate, and that the method is fast and feasible.
strapdown inertial navigation system; rotary modulation; systematic calibration; observability analysis; all parameters
2016-01-19。
王昆明(1988—),男,博士生;谢建(通信作者),男,教授,博士生导师。
国家自然科学基金资助项目(41174162)。
时间:2016-07-21
http:∥www.cnki.net/kcms/detail/61.1069.T.20160721.2214.010.html
10.7652/xjtuxb201610023
U666.1
A
0253-987X(2016)10-0153-08