一种汽车仪表的步进电机回零策略分析
2016-12-22李跃鹏
李跃鹏,雷 霖
(成都大学信息科学与工程学院,四川 成都 610106)
一种汽车仪表的步进电机回零策略分析
李跃鹏,雷 霖
(成都大学信息科学与工程学院,四川 成都 610106)
步进电机广泛应用于汽车组合仪表的设计,能够很好的应用于车速表、转速表的设计.步进电机准确的回零位置是汽车仪表正确指示的前提条件.从VID78电机的内部结构分析,对电机的PWM驱动电压、转子转动速度、仪表生产工艺等方面进行研究,提高电机的回零准确性.通过生产实践证明,电机的回零准确性显著改善,提高了汽车仪表生产良品率.
汽车仪表;步进电机;回零
汽车工业是现代科技水平发展高低的重要标志.在汽车工业中,电子式仪表是仍然是现代汽车中的最主要的汽车实况参数显示电子控制单元(ECU,Electronic Control Unit).多磁极电机因为其有更精确的转动精度和更大的转动角度,所有其拥有更广泛的应用领域,然而多磁极电机由于其内部自身的机械组成,造成使用该类电机的仪表出现较大的指示误差[1-3]. 以VID78步进电机为实例对电子汽车仪表步进电机进行回0误差分析并提出相应的解决方案,对提高企业的效益都有着重要的意义.
1 多磁极步进电机的回0原理
步进电机是一种能够将电脉冲信号转换成角位移或线位移的机电元件,它实际上是一种单相或多相同步电动机.如图1,Pin1/Pin2为定子线圈1绕组,Pin3/Pin4为定子线圈2绕组,当向这两组通不同幅值的PWM时,两组磁极线圈就会产生不同的磁力矩,在两组线圈的合磁力矩的作用下,中心的8极磁性转子就发生一定角度的转动.步进电机转过的总角度和输入的脉冲数成正比;连续输入一定频率的脉冲时,电动机的转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响,因此当向两组线圈输入最大反转向角度的脉冲数的PWM波时,步
进电机带指针就会回到机械0位处.
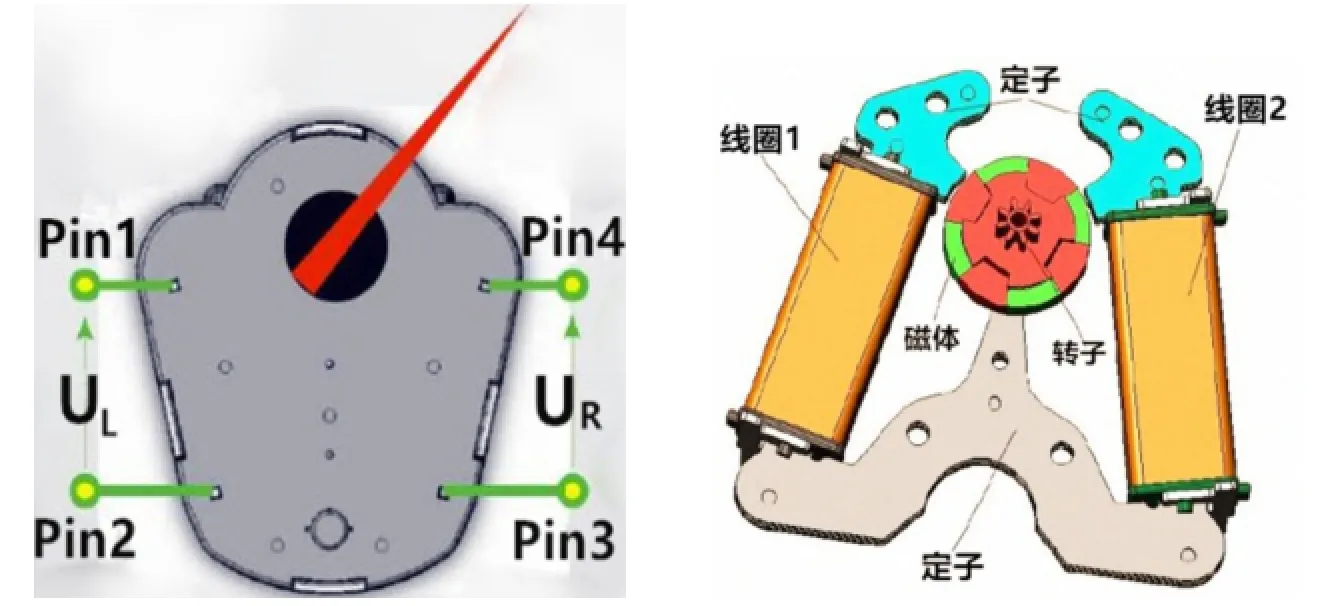
图1 多磁极步进电机结构图Fig.1 Multi pole stepping motor structure
2 汽车仪表步进电机回0分析
2.1 汽车仪表步进电机回零误差
汽车仪表在生产过程中是通常有两种电源开关控制,一种是BAT电源(汽车蓄电池电源),另外一种是IGN点火开关(通常车钥匙启动).正常情况下,BAT电源中断,则整个汽车仪表的电源都将切断,而在实际的汽车到用户手中时,BAT电源不会中断,汽车仪表的运行会根据IGN开关来判断是否应该处于工作和休眠状态.但在汽车仪表的生产压针的时候,是BAT和IGN同时打开,仪表的指针会进行回0.这个回0的准确性直接影响到汽车仪表整体各个参数指示是否准确.通常情况下会出现两种回零误差现象.
1)指针回到0刻度后继续向负零位方向走,最终出现指针偏离0位刻度负方向1刻度(0刻度线的宽度)的距离,并维持静止平衡.或者从负角度回弹到正角度,正向偏离.
2)指针偏离0刻度负方向以后,向0刻度正方向回弹,最终指针停留在偏离0刻度正方向1刻度的位置,并维持静止平衡.
很多仪表都存在上述两种或多或少的偏差,但如果指针偏离0刻度现象过于明显,将直接降低仪表合格率和出货率.该问题现象在车间生产中一定的比例出现,对企业的效益和形象都有着一定的影响.因此,需要对带动指针的VID78步进电机的回零情况做分析.
2.2 步进电机0位受力分析
当回到0位的时候,电磁扭力F2与电机0位挡板阻力F2合力保持指针的静止状态,则就有F2越大,挡板的形变越大.回到0位以后,汽车仪表进入休眠状态,不在有电流通过产生电磁扭力F2.而这时0位挡板形变大,则正向回弹较大,正向偏离标准0位;而如果0位挡板形变小,则回弹较小,则负向偏离0 位.如图2所示.
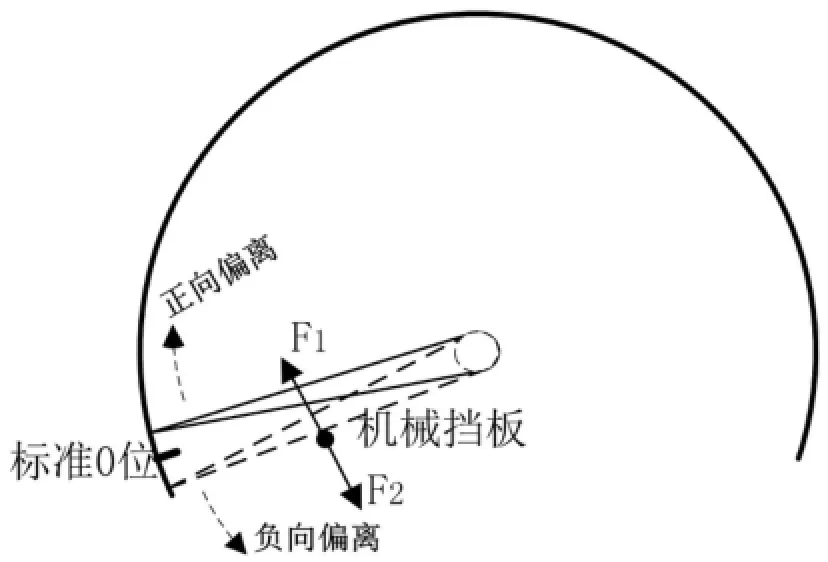
图2 指针回0受力分析Fig.2 The pointer back to 0 force analysis
则回弹角度α与步进电机的引脚电压U的关系式推导如下
回到0位未休眠,指针受力平衡有

而仪表电机休眠后,回弹的强度与挡板的形变量X成正比关系(形变越大,回弹越高).设指针的回弹角度为α,则有

其中,一个确定的步进电机的ρ,k1,k2,r为常数.则有电机的驱动电压越大,回弹角度与大.
2.3 多磁极步进电机机械结构
VID78步进电机是一个典型的有8极磁石转子和通电线圈来进行转动工作,从磁石转动到转轴转动,通过两级的齿轮传动,如图3所示,其转动的此轮减速比为1:45,在通过齿轮传动的时候过程都会出现齿隙(齿轮与齿轮间咬合时的间隙),这种齿隙是机械传递过程正常进行不可缺少的一种非线性形态,同时也是影响系统动态性能和稳态精度的重要因素,而这个齿隙是很难进行解决的,而VID78的齿隙回程差在0.8到1,因此可能会出现电机驱动为某一定值的,而所带动的指针去会出现很小范围内的移动,即可以说明,仪表中电机本身已经指示到0位,由于其电机自身齿隙的原因造成指针的微小偏移.
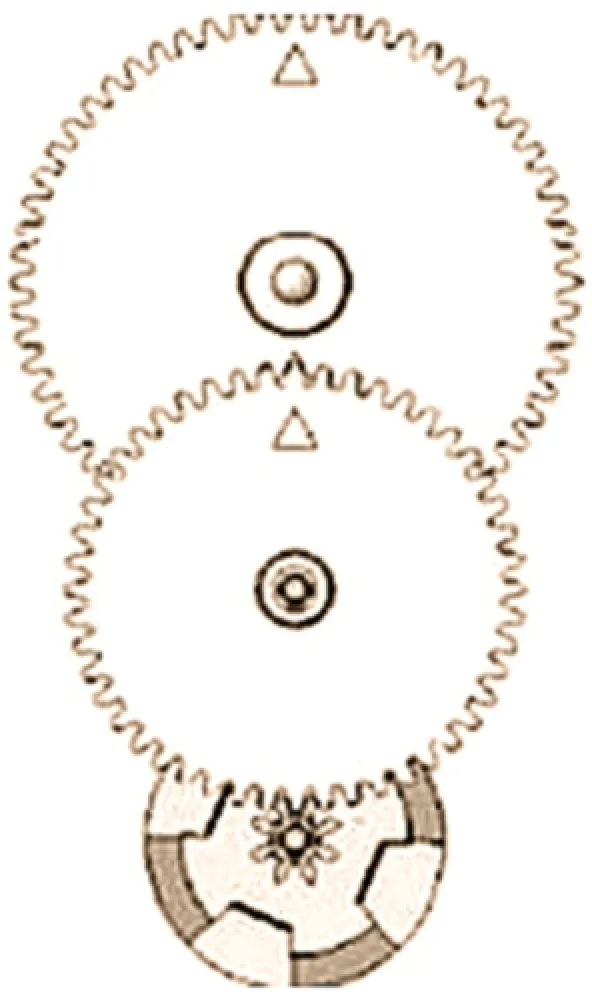
图3 VID78齿轮传动Fig.3 VID78 gear drive
2.4 压针工艺对电机回0的影响
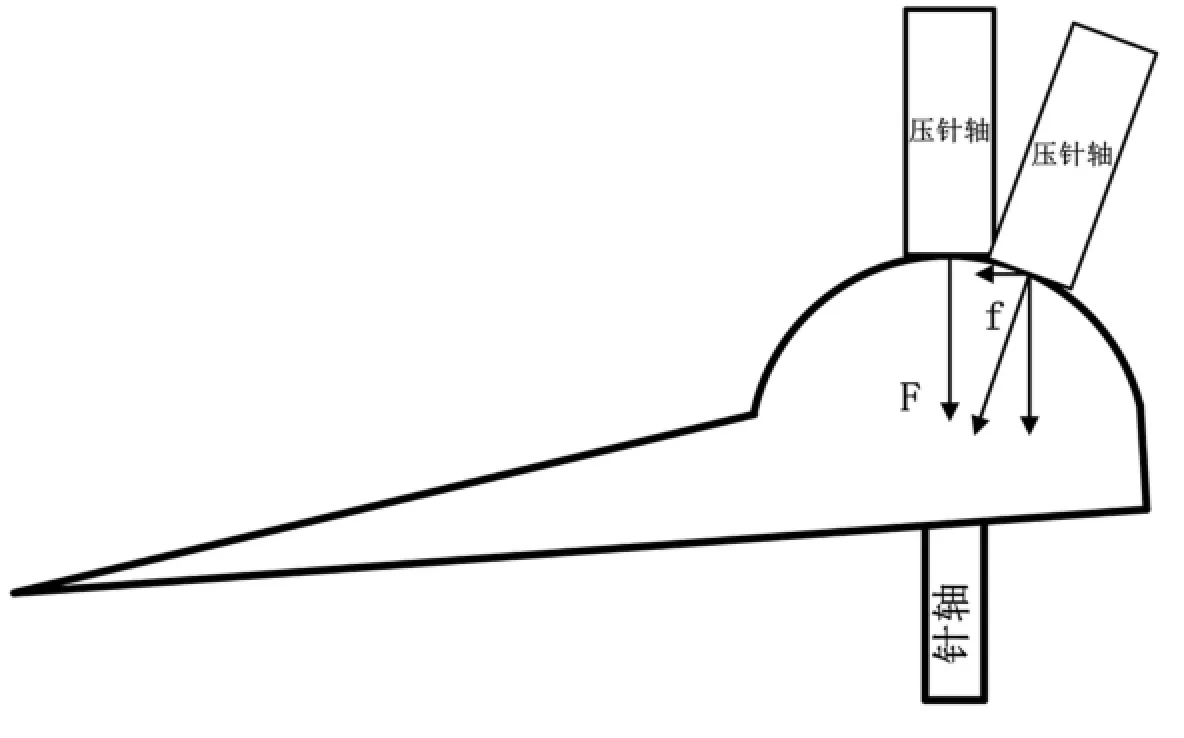
通过对生产工艺的流程了解,机器对仪表进行压针的时候,仪表全程通电,由于指针的压针点有一定的弧度,在0位压针过程中出现压针传感器轴与步进电机针轴的出现一定的偏差,从而对电机针轴和指针产生一个侧向的力,侧向的分力f使得指针轴在0位轻微扭曲,造成指针在0位时未在一个垂直的轴运动,压针示意图如图4所示.
3 步进电机电机回0稳定性改善策略
从汽车仪表步进电机的回0受力情况、机械构造以及压针情况得出,步进电机机械结构齿隙寄希望于设计厂商提高良品率,减小齿隙.仪表生产压针的时候提高压针的准确性,减小压针的接触面;仪表压针全程通电,严禁压针后任何形式触摸指针,以免操作齿轮;保证压针工装精度,确保压针传感器与步进电机针轴的同轴度.还可以从几个方面进行回0稳定性改善.
3.1 大小回0策略
在仪表的生产过程中,生产设备压针后确定步进电机的机械0位.在汽车厂进行仪表安装的时候,当仪表首次上电大回0,电机的两相绕组的电极被通上最大步进转动角度PWM信号脉冲,并以一个200°/s-300°/s的转动速度回转,在步进电机的0位附近,由于有机械挡板作用,保证无论指针在步进电机允许的任何位置都能够回到0位.
但由于指针的惯性以及机械挡板反作用力,出现指针回弹.这时采用小回0,及在小角度的低速回弹补偿这一弹起的角度,保证回0准确.降低指针的回0的速度,减低指针停针前的动量.采用大小回0设计图如图5所示:
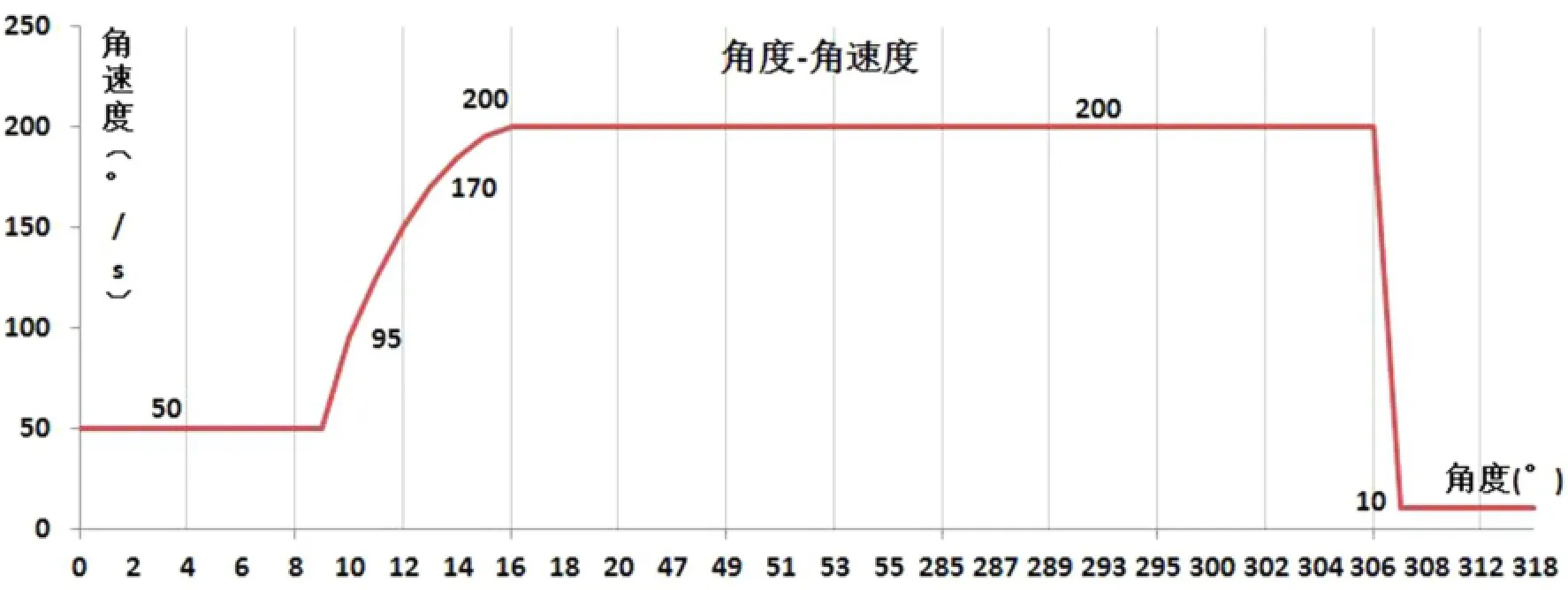
图5 大小回0示意图Fig.5 Schematic diagram of the size back 0
如图所示大回零累计318度:启动速度为50°/s,采用上图方式8度加速过程直到200°/s,至306度保持高速回零过程,转动速度降为10°/s.实际情况中,转动速度还没有降到10°/s,指针就已经机械0位处回弹,采取小回0补偿,速度降为10°/s回零10度.通过大小回0方式以达到较准确的回0.
3.2 调整驱动信号
从公式(4)可以看出,想要达到合适的回弹角度通过调整驱动电压.而调整步进电机的驱动电压是通过调整PWM波信号的占空比来进行调整.
步进电机回0的过程中,PWM信号载波频率范围为16KHz-32KHz,PWM驱动信号分辨率大于8位.当驱动频率大于启停频率时,要做加减速处理,以避免丢步.当电机驱动方向改变时需要进行齿隙补偿;如果驱动频率大于启停频率,也要做加减速处理.根据指针不同启停频率和加速过程有很大的差异;指针越长,越重,平衡性差的指针起停频率越低,需要的加速过程越长,允许的加速度越低[12-15].
调整小回0是步进电机的驱动力,由于电机带动指针的运动的驱动力与PWM波的缩小比例有直接的关系(比例越大,驱动力越大).减小电机驱动指针对挡板的弹性形变,可以减小指针在0位时正向偏离.故采取在回0的过程中,当指针距离0刻度小于4°的时候,将PWM波的占空比缩小原占空比的0.66,当距离0刻度小于2°的时候,将PWM波的占空比调整原占空比为0.33.根据角度逐次减小PWM波占空比的驱动比例,以达到减小步进电机的驱动电压.
由于这样的PWM相关的驱动力调整只是限制在小回0将要接近0位的小角度内改变,不会影响大角度的回0,降低在0刻度附近的冲击力,从而改善指针的回0状况.不影响仪表指针的正常运动和指示.
4 结论
改善压针的接触面,提高压针的垂直正确率.调整软件设计,按照上述设计改善汽车仪表步进电机的回0情况,并将程序应用实际的生产过程中,很好的改善了汽车仪表步进电机的回0准确率,提高了企业生产的良品率.
[1]马文斌,杨延竹.步进电机控制系统的设计及应用[J].电子技术应用,2015,41(11):11-13.
[2]王定贤,刘振兴.计算机和单片机对步进电机的无线控制[J].机电工程技术,2015,44(2):19-22.
[3]戴乐,王凯凯.电子罗盘步进跟踪法的改进[J].数字技术与应用,2015(11):94-95.
[4]周晓东,李亚杰.汽车仪表指针识别方法研究[J].长春工业大学学报(自然科学版),2010,31(1):32-36.
[5]崔艳淞,程志涛,汽车仪表装配流水线综合检测系统研究[J].中国西部科技,2015,14(12):53-54.
[6]冯渊.汽车电子控制技术[M].北京:机械工业出版社,2011.
[7]马帅旗.基于FPGA的步进电机变速控制系统研究[J].机床与液压,2013,41(7):74.
[8]简毅,刘宝.基于AT91SAM9261的步进电机S曲线加减速控制研究与实现[J].轻工机械,2012,30(3):62.
[9]A.MELLIT,H.MEKKI,A.Messai,S.A.Kalogirou.FPGA-based implementation of intelligent predictor for global solar irradiation,Part I:Theory and simulation[J].Expert Systems With Applications,2010(3): 19-21.
[10]HOANG LE-HUY,PATRICE BRUNELLE.“Gilbert Sybille.Design and Implementation of a Versatile Stepper Motor Model for Simulink’sSimPowerSystems”,2008.
[11]周艳秋.步进电机定位控制技术的研究[D].大连:大连交通大学2009.
[12]王立,刘景林,吴喜桥.混合式步进电机细分驱动系统建模及故障仿真[J].微电机,2011,44(6):82-87.
[13]孙建仁,胡赤兵,王保民.一种Jerk连续的正弦函数平方曲线加减速算法研究[J].制造技术与机床,2010,12:158-161.
[14]王海伟.改善混合式步进电机运行性能的功角控制策略研究[D].浙江:浙江大学,2012:34-35,46-49.
[15]张少林.基于FPGA的步进电机控制系统的数字硬件设计研究[D].成都:电子科技大学,2003.
(责任编辑:张阳,付强,李建忠,罗敏;英文编辑:周序林)
Analysis of zero strategy of stepper motor for an automobile instrument
LI Yue-peng,LEI Lin
(School of Information Science and Engineering,Chengdu University,Chengdu 610106,P.R.C.)
The stepper motor,widely used in the design of combined automobile instrument,can be well applied in the speedometer,tachometer design.Accurately returning to zero position of stepping motor is a prerequisite for the correct indication of the auto meter.The internal structure of VID78 motor is analyzed.and the research of PWM drive voltage,rotor rotation speed,meter manufacturing process and so on is studied.The accuracy of the return to zero of the motor is improved.The production practice proved that the accuracy of the motor's return to zero is improved significantly,and the yield of the automobile instrument is improved.
automobile instrument;stepper motor;return to zero
TM383.6;U463.7
A
2095-4271(2016)04-0457-05
10.11920/xnmdzk.2016.04.016
2016-03-18
李跃鹏(1987-),男,汉族,四川达州人,助教,主要研究汽车电子,微控制器技术,E_mail:pengliyue@163.com.
四川省科技厅国际合作与交流计划(2014HH0069);四川省科技支撑计划(2015GZ0275);四川省科技支撑计划(2013GZX0141).
