三种支撑方式下反射镜镜面静力分析
2016-12-21郭钰琳
李 睿,郭钰琳
(西安工业大学 光电工程学院,西安 710021)
三种支撑方式下反射镜镜面静力分析
李 睿,郭钰琳
(西安工业大学 光电工程学院,西安 710021)
为了分析不同的反射镜支撑结构对反射镜面型精度的影响,利用有限元法分析计算环形支撑、三点支撑及钢带支撑三种支撑结构下的反射镜镜面的应力与位移变化量.根据不同的支撑方式,反射镜受力的不同进行边界条件设定,环形支撑,对整个圆加以约束,三点支撑,圆选择三点加以约束,钢带支撑边界条件选择下端圆弧固定加以约束.研究结果表明:环形支撑得到反射镜的最大应力为0.004 4 MPa,三点支撑得到反射镜的最大应力0.047 7 MPa,钢带支撑得到反射镜的最大应力为0.024 5 MPa,带式支撑的镜面应力位移变化较为均匀,相比较前两种支撑方式,钢带支撑较为可行.
反射镜;有限元;应力;位移变化
反射镜在光电仪器中占有重要的地位,在航空航天领域应用也较为广泛,反射镜在空间会受到重力和温度的影响,如果镜面的变形较大,超出了光学系统设计的指标范围,光学系统的成像质量就会受到影响.反射镜的大小、重量也关系着光学系统整体的结构以及重量.为了得到较好的成像质量、降低光学仪器的重量,反射镜要有较大的刚度、最为合适的质量以及理想的支撑方式[1].采用三点支撑对反射镜进行固定,实现了对光路的折转,但是结构只局限在精度要求不高的光学仪器结构中.哈工大研制的“神光-Ⅲ原型装置”反射镜的支撑方式采用轴式镜架正交的结构形式,可对光线反射方向进行控制.实现反射镜镜片的二维正交旋转运动[2],也局限于精度较低的光学仪器.
不同的反射镜支撑结构对光学系统的成像质量影响不同,随着光电技术的不断提高,光学系统的口径也由小口径向大口径发展,反射的距离也由近及远,折转光路由少变多.为了提高光学系统本身的成像质量并保证大口径光学镜拥有较高的镜面面形精度,需要严格控制光学反射镜的加工工艺,还需要设计合理的反射镜支撑结构.
目前,远距离反射系统在航空航天领域有着非常重要的地位,也是国内外研究的重点,代表着先进的科研技术,在光电仪器设备中大口径光学元件的使用存在着很多因素的限制.首先,镜面面形质量的高低对光学系统的影响较大,这就要求保持较高的镜面面形质量,尽可能地提高光学元件的比刚度[3].其次,设计合理的反射镜支撑结构以及降低反射镜自身的重量对系统的成像质量有直接影响.针对大口径反射镜光学元件,在设计支撑结构时要综合考虑各种支撑状态以及结构自身重力的影响.因此,需要对不同的支撑结构下反射镜的变形量进行分析,确定较为合理的支撑结构.随着光电技术的不断发展,大口径、非球面光学镜逐步取代了原有的透镜,目前国内外在非球面、大口径反射镜加工制造工艺上已有了较大突破.国内长春光机所、苏州大学等多家科研院校已开始研制大口径的非球面镜,精度都可达到光学系统装配的精度需要[4]. 但是,由于反射系统对反射镜的支撑结构设计的合理性要求较为苛刻,若支撑结构设计不能满足与反射系统的安装精度,就会导致光学系统的成像质量下降[5].因此,本文对大口径远距离反射系统的反射镜支撑结构进行设计分析.利用有限元分析法对三种不同支撑结构下的镜面面形进行分析计算,得出不同的应力值与最大位移变化值.为大口径远距离反射系统的设计、分析提供理论依据及技术保证.
1 反射镜的三种支撑方式
1.1 支撑方式结构模型
反射镜的边缘施加一个连续的线接触,这种结构为较简单的圆环类支撑结构,如图 1所示.由图1可知反射镜镜面受重力影响后的变形量,ΔYc、ΔYR和ΔYE分别表示圆形反射镜的中心变形量,表达式分别为
(1)
(2)
(3)
式中:w为中心误差的权重; m为玻璃材料泊松比 的倒数;DG、a和b分别为标注的圆形透镜直径、矩形透镜长和宽的外形尺寸;α=b/a;EG为玻璃的杨氏模量;tA为反射镜的厚度.可见,使用杨氏模量较大的玻璃材料或者提高反射镜自身的厚度可以有效减小由于重力导致的变形.
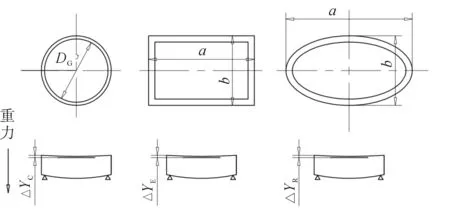
图1 环形支撑
Fig.1 The mirror with annular support
如果反射镜的放置方式为光轴垂直,使用的安装方法为三点支撑,在反射镜的背部取三个定点作为支撑点,保持安装的对称性,三点则位于以其中一个反射镜光轴为中心的圆上,角度间隔相等,一般为120°.这种支撑方式具有一个最优的支撑半径,可使得反射镜面形误差的峰谷值(Peak to Valley,PV)最小.
在选择支撑点数时可根据薄板理论,适当的增加主反射镜的支撑点,使主反射镜由于自身重力带来的变形量有所减小[6].由此理论推断出一个经验公式
δrms=γN(q/D)A2
(4)
式中: δrms为变形量值; q为载荷;A为镜面的面积;D为抗弯刚度;γN为支撑效率常数.因此,针对较大口径且镜面厚度较薄的反射镜,可通过适当的增加支撑点数和提高镜面厚度来减小镜面的变形量,以便提高光学系统整体结构的精度.
带式支撑结构反射镜的重力分布在钢带与镜体接触的圆周面内,应力分布均匀,镜面变形小,面型误差小,精度容易保证.因此,本设计以带式支撑结构为依据,对本系统支撑结构进行设计.
1.2 网格划分
将模型导入ANSYS中,进行网格划分,生成节点和单元得到反射镜的有限元模型,划分网格时对分析结果比较重要受力较大的区域尽量细化网格,选择自由划分网格,网格等级为6级.
根据不同的支撑方式,反射镜受力的不同进行边界条件设定,环形支撑,对整个圆加以约束,三点支撑,圆选择三点加以约束,钢带支撑边界条件选择下端圆弧固定加以约束.由于支撑方式的不同,反射镜的受力点也不同,所以三种不同的支撑方式采用了三种不同的约束方式.在进行边界约束时必须结合实际和具体情况选择约束方式,才可得到准确合理的结果.若约束方式选择不当,分析结果将存在较大误差,甚至得到错误的数据.
1.3 反射镜的材料参数
K9玻璃材料的主要参数为密度ρ,D为口径,h为厚度,弹性模量E,泊松比μ,参数值见表1.
表1 K9玻璃材料物理性能参数
Tab.1 Physical property parameters of the glass K9

参数参数值参数参数值ρ/kg·m-33000D/mm600h/mm65E/MPa82e3μ0.206
根据表1,得出反射镜的质量为
m=ρ·v=3×103×(600/2)2×3.14×65×10-9=54 kg
(5)
反射镜所受自身重力G0为
G0=54×10=540 N
(6)
为确保分析后的数据充分满足技术指标,所以反射镜自身重量按G1=1 000 N计算.
1.4 有限元静态分析法
对不同支撑结构下的反射镜进行静力分析.首先利用三维软Solidworks对口径为∅600 mm的反射镜进行三维实体建模,然后将三维实体模型进行简化导入ANSYS,对三种支撑方式的镜面(环形支撑、三点支撑和钢带支撑)进行静态应力分析,通过静力分析求解透镜在静力载荷作用下的位移和应力.
2 结果及分析
2.1 环形支撑下的应力位移
利用 ANSYS通用后处理器可直观地看到所求解的最大应力与位移变化量,通过云图直观的看出应力与位移的变化量, 如图2所示.环形支撑下反射镜的最大应力为0.004 4 MPa,最小值为0.527×10-4MPa,由图2可知,在环形支撑下反射镜的最大变形位移量0.329×10-5mm,变形量最大区域为中间区域,边缘区域变形量微乎其微变形比较均匀,但是应力变化最大值与最小值差相对较大.根据工作需求,有时会尽量兼顾静力学模型与动力学模型,所以在构造有限元模型时尽量减小模型的规模,合理划分网格,但难免会带来某些局部不合理的简化,可能会对计算结果有一定影响.

图2 环形支撑镜面应力变化云图(MPa)
Fig.2 The stress variation of mirror with annular support(MPa)
2.2 三点支撑下的应力位移
三点支撑方式通常采用对称的三点进行边界约束,角度间隔为120°,利用 ANSYS后处理器可直观地看到所求解的最大应力与位移变化量,如图3~5所示.三点支撑下反射镜的最大应力出现的区域也就是支撑点的位置应力值为0.047 7 MPa,最小值为0.128×10-3MPa,由图3~5看出,在三点支撑下反射镜的最大变形位移量为0.160×10-4mm.由于是点支撑结构导致局部的应力和变形较大,从三点支撑镜面变化云图可看出应力和位移变化不均匀,出现在反射镜的局部,严重的时候可能会损坏镜片,对整个光学系统的成像质量影响较大.

图3 环形支撑镜面位移变化云图
Fig.3 The displacement change of mirror with annular support
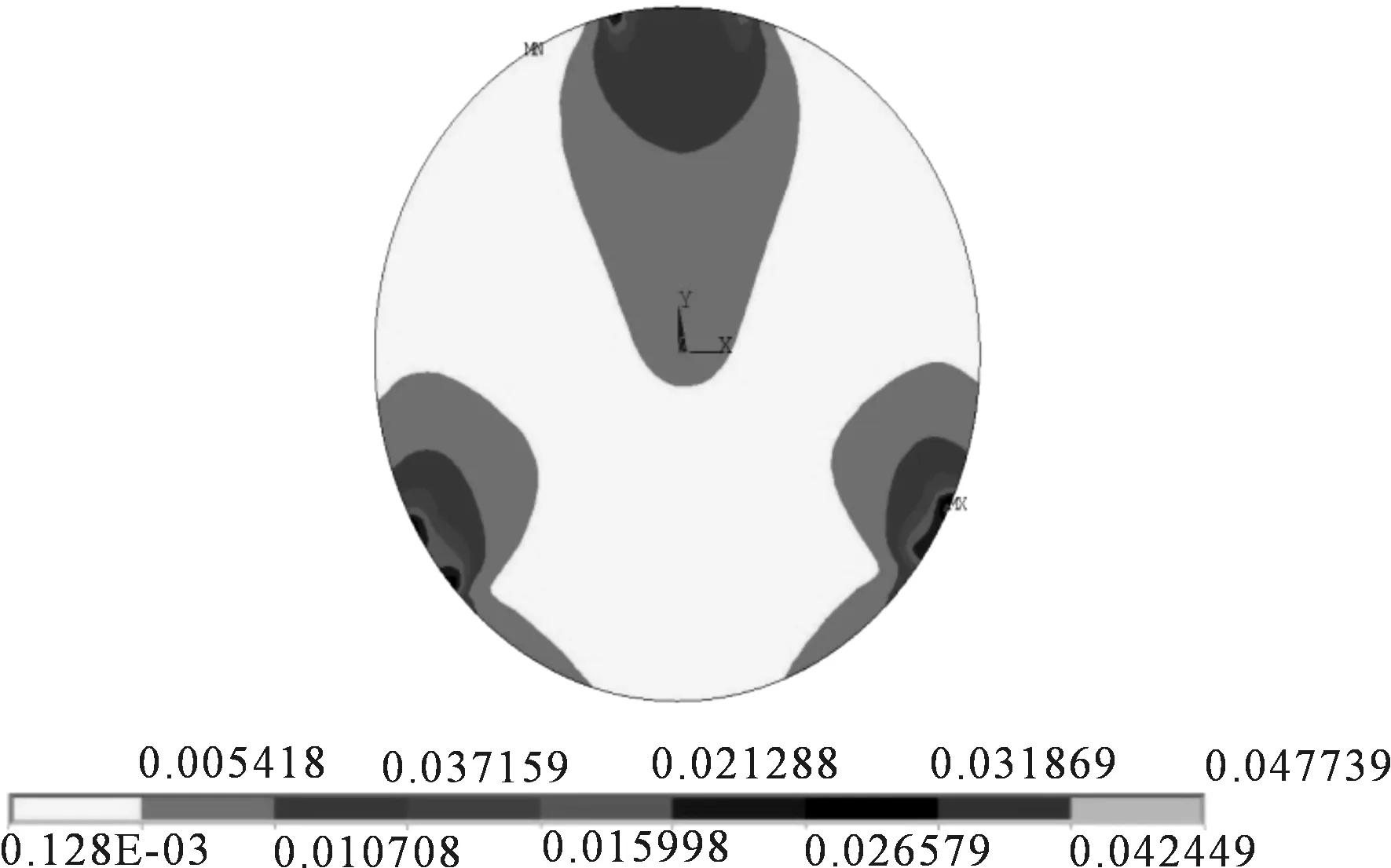
图4 三点支撑镜面应力变化云图
Fig.4 The stress variation of with three-point support

图5 三点支撑镜面位移变化云图
Fig.5 The displacement change of mirror with three-point support
除了以上分析的误差以外,还存在由于材料属性带来的误差,尤其在设计的初始阶段,无形中就引入了刚度和质量偏差.由于材料表里测量的值是在一定的环境测试条件下所得到,而具体在实际应用中所用的材料不一定是在原来的环境测试条件下生产出来的,从理论上讲,分析模型存在一定的材料属性误差[7].
2.3 钢带支撑下的应力位移
钢带支撑镜面应力变化云图如图6所示.由图6~7可知,反射镜的最大应力F3为0.024 5 MPa,最大变形位移S3为0.109×10-4mm.玻璃的最大应力远远低于材料的抗拉强度,满足F3<σ设计要求(σ=300 MPa为钢带的抗拉强度极限).

图6 钢带支撑镜面应力变化云图
Fig.6 The stress variation of mirror with steel belt support

图7 钢带支撑镜面位移变化云图
Fig.7 The displacement change of mirror with steel belt support
以上对三种支撑方式下∅600 mm的反射镜镜面进行有限元分析,通过ANSYS后处理器计算得出相对应的反射镜的应力和位移变化数值为:F1=0.004 401 MPa,F2=0.047 739 MPa,F3=0.024 528 MPa;S1=0.329E-05 mm,S2=0.160E-04 mm,S3=0.109E-04 mm.通过对三种支撑方式分析计算所得到的数据比较,得到带式支撑下的镜面变化云图较为均匀,成像质量较好.玻璃的最大应力远低于材料的抗拉强度,完全满足设计要求.综上所述,选择钢带式支撑结构精度最高[8].
3 结 论
1) 本文针对大口径反射镜进行了在不同支撑结构下的面形分析,重点对口径为∅600 mm的反射镜的支撑结构设计和有限元分析,全面阐述了反射镜的支撑结构的优缺点.
2) 利用ANSYS有限元分析软件,在三种不同的支撑结构下的反射镜镜面面形进行分析.结果表明镜面应力位移的变化总体性能较好的支撑方式可作为大口径元件的支撑结构,采用环形支撑及三点支撑方式下对反射镜的面形精度影响较大,适用于精度要求不高的结构,而钢带式支撑结构对反射镜的面形精度影响较小,适用于较高精度的结构.
3) 通过三维设计技术与有限元分析技术相结合的方法对反射镜的支撑方式进行研究,得到相对较为理想的支撑方式.
[1] 刘磊,高明辉,李丽富, 等.空间相机主反射镜结构拓扑优化设计[J].红外与激光工程,2010,39(6):1066.
LIU Lei,GAO Minghui,LI Lifu,et al.Primary Mirror Topological Optimum Design of Space Camera[J].Infrared and Laser Engineering,2010,39(6):1066.(in Chinese)
[2] 杨力.先进光学制造技术[M].北京:科学出版社,2001.
YANG Li.Advanced Optical Manufacturing Technology[M].Beijing:Science Press,2001.(in Chinese)
[3] 吴清文,杨洪波.空间相机中主镜及其支撑方案设计与分析方法[J].光学技术,2004,30(2):153.
WU Qingwen,YANG Hongbo.The Design and Analysis Methods of the Primary Mirror and Its Support in the Space Camera[J].Optical Technique,2004,30(2):153.(in Chinese)
[4] 刘国庆,马文礼.大口径轻质镜支撑的有限元分析[J].光电工程,2001,28(5):14.
LIU Guoqing,MA Wenli.The Finite Element Analysis for Large-aperture Light Weight Mirror[J].Optoelectronic Component,2001,28(5):14.(in Chinese)
[5] 刘宏伟,张芹,丁亚林,等.基于有限元分析的长条状主镜支撑结构设计[J].光学精密工程,2003,11(6):555.
LIU Hongwei,ZHANG Qin,DING Yalin,et al.Design of Strip Primary Mirror Supporting Structure Based on Finite Element Analysis[J].Optics and Precision Engineering,2003,11(6):555.(in Chinese)
[6] 杨国峰.光学系统中心偏误差分析方法研究[D].西安:西安工业大学,2015.
YANG Guofeng.Research on the Method of Error Analysis in the Optical System Decentration[D].Xi’an:Xi’an Technological University,2015.
(in Chinese)
[7] ARNOLD L.Optimized Axial Support Topologies for Thin Telescope Mirrors[J].Optical Engineering,1995,34(2):567.
[8] 曾攀,雷丽萍,方刚.基于ANSYS平台有限元分析手册-结构的建模与分析[M].北京:机械工业出版社,2010.
ZENG Pan,LEI Liping,FANG Gang.Manual of Finite Element Analysis Based on ANSYS-Modeling and Analysis of Structure[M].Beijing:China Machine Press,2010.(in Chinese)
(责任编辑、校对 潘秋岑)
Static Analysis of Reflector Mirror in Three Kinds of Support Structure
LIRui,GUOYulin
(School of Optoelectronic Engineering,Xi’an Technological University,Xi’an 710021,China)
In order to analyze the influence of the support structure on the accuracy of reflector, finite element analysis is used to calculate the stress and displacement variation of the reflector with three kinds of support structure:circle support, three-point support and steel belt support. According to the different ways of support, different boundary conditions of mirror force are set. For ring support, the whole circle is restrained, for three-point support,three poits of a circle are restrained,for steel belt support, the bottom circle is fixed to restrain it. The results show: The stress of the reflector with ring support is 0.004 4 MPa,the stress of reflector with three-point supporting is 0.047 7 MPa,the stress of reflector with steel belt supporting is 0.024 5 MPa. It is concluded that the cloud of mirror changes in the steel belt type support is relatively uniform. Compared to the first two support, the steel belt supporting is more feasible.
reflector;finite element;stress;displacement variation
10.16185/j.jxatu.edu.cn.2016.10.002
2016-06-20
西安工业大学校长基金(XGYXJJ-1303)
李 睿(1986-),男,西安工业大学助教,主要研究方向为仪器总体结构设计.E-mail:lirui_rui@126.com.
TH12
A
1673-9965(2016)10-0781-05
