基于RT5350嵌入式平台的无线智能小车控制系统设计
2016-12-21王浩
王 浩
(苏州健雄职业技术学院电气工程学院,江苏太仓 215411)
基于RT5350嵌入式平台的无线智能小车控制系统设计
王 浩
(苏州健雄职业技术学院电气工程学院,江苏太仓 215411)
随着无线通信技术的不断发展,基于WIFI无线通信的嵌入式应用应运而生,本文设计一种基于RT5350嵌入式平台,利用WIFI无线通信技术实现PC端无线控制智能小车.系统由RT5350嵌入式通信处理模块、电机驱动模块以及电机模块组成.实验结果表明:该系统操作方便和可靠性强,具有一定的应用前景.
RT5350;WIFI;PC;智能小车
随着嵌入式技术和无线网络通信技术的迅速发展,人们对智能化产品需求不断扩大,希望通过WIFI无线通信方式与智能化产品交互,实现远程无线控制.由于WIFI无线网络相比传统的通信方式具有覆盖面积大、布线比较简单、传输速度快等优势,广泛应用在民用和工业领域.本文提出一种基于RT5350嵌入式平台,利用其具有的WIFI功能,实现智能小车无线控制的设计方案,通过智能小车上的RT5350嵌入式无线通信处理模块和PC端进行无线通信,可以很好的实现小车前进、后退、左转、右转以及停止操作.
1 总体设计
为了提高传统智能小车控制系统的灵活性和可扩展性,使智能小车控制系统更加模块化,本系统以RT5350嵌入式无线通信处理模块为核心,构建WIFI主体网络的AP端,PC端通过WIFI方式连入智能小车控制系统,实现局域网内的数据传输功能.具体来说,PC端首先通过WIFI方式将控制智能小车的命令发送至RT5350嵌入式平台中的无线通信处理模块,然后RT5350嵌入式平台中的无线通信处理模块收到控制命令之后进行处理解析转换为控制信号,最后通过GPIO口发送至智能小车的电机驱动模块实现车轮电机动作控制.系统的功能结构如图1所示.

图1 智能小车系统结构图
2 系统的硬件设计
2.1 RT5350无线通信处理模块硬件设计
无线通信处理模块硬件组成主要包括RT5350的SOC芯片、WIFI收发模块、电源和外部存储器等,其中RT5350 SOC是Ralink雷凌公司最新推出的一款集无线射频传输与嵌入式微控制于一体的高科技WIFI应用芯片,CPU内核采用的是高性能、合成度高的MIPS24KEC芯片,最高主频能达到360MHz,可支持嵌入式Linux系统的运行.另外RT5350的SOC芯片外置接口配置丰富,有串口、I2C、I2S、两个网口,及多个GPIO,本系统通过RT5350的GPIO引脚输出的高低电平控制电机驱动模块,从而控制电机的运行.具体结构如图2所示.
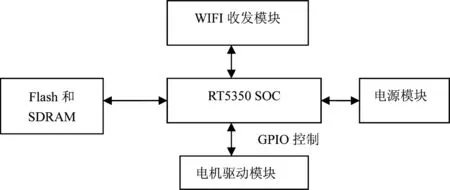
图2 RT5350网关硬件组成
2.2 电机驱动模块硬件设计
电机驱动模块主要采用ST意法半导体公司生产的L298N高电压、大电流电机驱动芯片.该芯片采用15脚封装.主要特点是:工作电压高,最高工作电压可达46V,持续工作电流为2A;额定功率25W.它内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机等负载.L298N芯片驱动电机的硬件电路如图3所示.
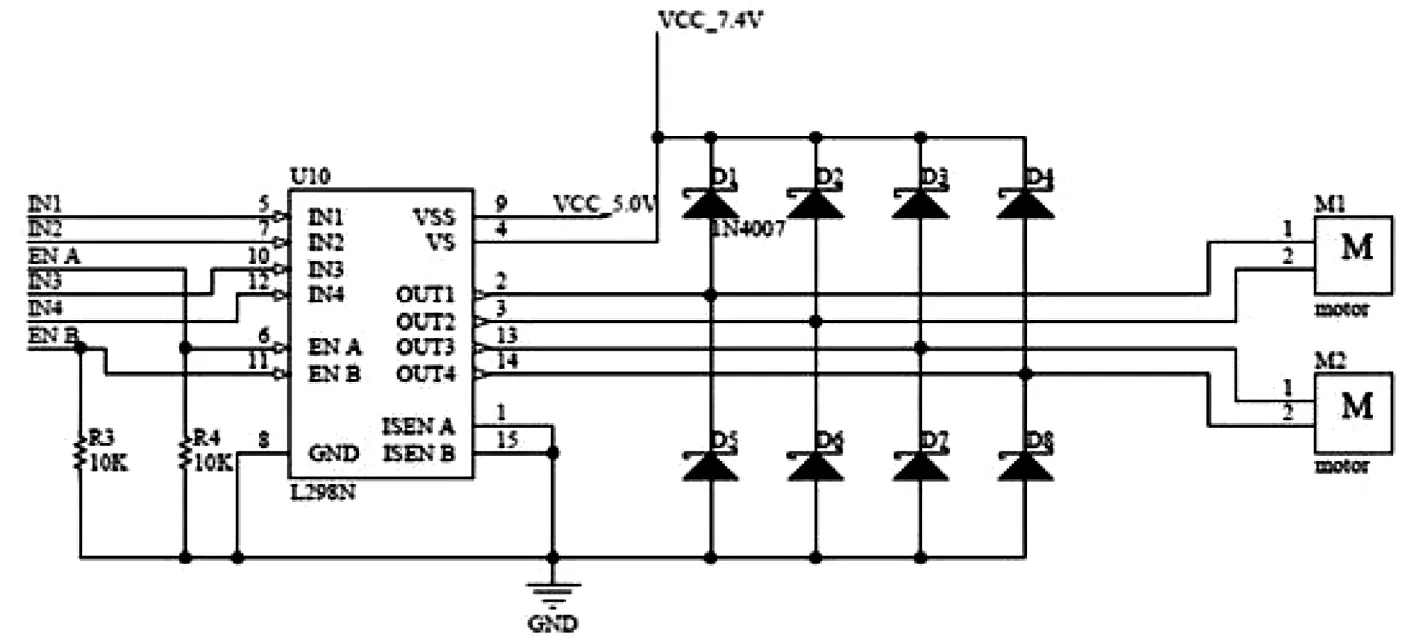
图3 L298N电机驱动模块
2.3 直流电机控制过程设计
电机驱动模块的L298N的1脚和15脚发射极分别单独引出以便接入电流采样电阻,形成电流传感信号.IN1,IN2,IN3,IN4接收脉冲信号,OUT1,OUT2和OUT3,OUT4之间分别接电动机的M1和M2.5,7,10,12脚接输入控制电平,控制电机的正反转.ENA,ENB控制使能端,高电平有效.电机驱动模块的控制智能小车的行驶方向及直流电机M1和M2状态如表1所示.
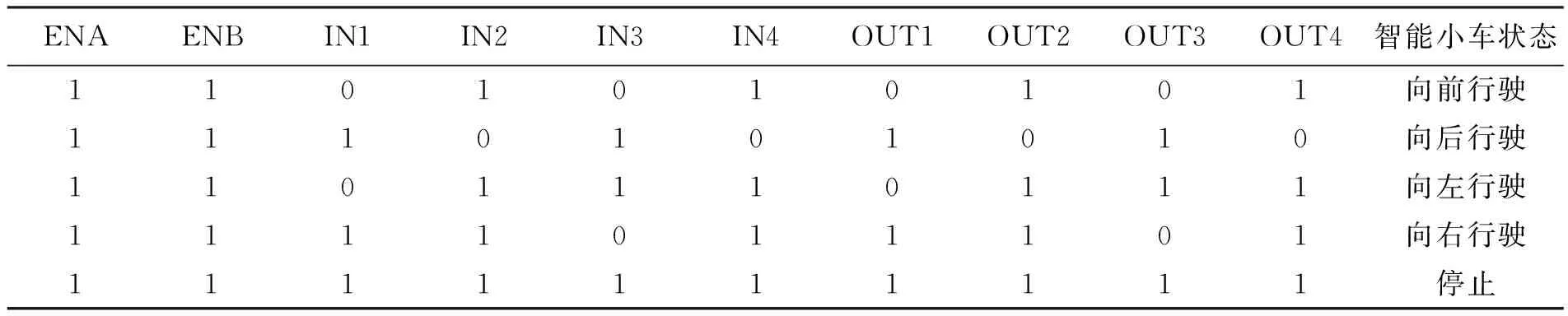
表1 控制方向及直流电机状态
3 系统的软件设计
软件是智能小车实现控制功能的核心,主要包括电机驱动程序部分和客户端(PC端)与服务器端(智能小车)的TCP网络通信部分.
3.1 电机驱动程序设计
电机驱动部分主要是驱动电机实现前进、后退、左转、右转以及停止操作,具体的实现函数框架如下:
static long motor_drv_unlocked_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
switch(cmd)
{
case WIFI_Car_RUN:小车前进;break;
case WIFI_ Car _BACK:小车后退;break;
case WIFI_ Car _LEFT:小车左转弯;break;
case WIFI_Car_RIGHT:小车右转弯;break;
case WIFI_Car_STOP:小车停止;break;
default:break;
}
return 0;
}
3.2 WIFI网络通信程序设计
由于PC端和智能小车之间通过无线局域网进行通信,其两端实时数据传输可以采用TCP/IP网络的API编程实现,由客户端部分(PC端)和服务器端(智能小车)组成C/S软件架构,客户端和服务器端通过基于WIFI的无线通信链路取得连接.客户端在后端控制台(PC机)上,主要完成两个任务,一是提供可视化的操作和显示界面,二是与服务器连接,将指令传递给服务器和接收服务器反馈数据;服务器端位于智能小车平台的RT5350核心控制器上,主要完成命令的解析处理,并将处理的命令发送到电机驱动程序部分,通过电机驱动程序完成对智能小车的运动控制.WIFI网络通信流程如图4所示.

图4 WIFI网络通信流程
4 系统测试
为了验证PC端利用WIFI无线网络通信方式实现对智能小车运动控制,本系统采用QT编程实现客户端操作界面功能,如图5所示.当智能小车上电之后,RT5350控制器产生AP热点,将PC机连入其创建的WIFI网络,通过QT操作界面设置网络IP和端口号,建立TCP连接,一旦连接成功之后,可以在操作界面上无线控制智能小车的运动轨迹.通过测试,功能一切正常.

图5 智能小车操作界面
5 结束语
文中基于RT5350嵌入式平台,提出了一种无线智能小车控制系统解决方案,设计了以RT5350嵌入式无线通信处理模块为核心,构建无线通信的AP热点模式,PC端通过WIFI加入无线网络之后发送控制命令,从而控制电机驱动模块以实现小车的前进、后退、左转、右转及停止操作.运行试验表明:基于RT5350嵌入式平台的无线智能小车控制系统具有通信可靠、抗干扰性好等优点.
[1]袁新娣,李秋生.基于RT5350的嵌入式无线视频数据采集系统[J].安徽大学学报(自然科学版),2014,20(6):47-50.
[2]姜仲,刘丹.ZigBee技术与实训教程[M].北京:清华大学出版社,2014.
[3]王浩,浦灵敏.物联网技术应用开发[M].北京: 中国水利水电出版社,2015.
[4]张少军.无线传感器网络技术及应用[M].北京:中国电力出版社,2010.
[5]高守玮,吴灿阳.ZigBee技术实践教程[M].北京:北京航空航天出版社,2009.
[6]苗敬利,李腾.基于openwrt的智能家居服务器的设计[J].网络安全技术与应用,2014,15(8):36-37.
[7]潘伟.基于ZigBee技术的无线传感网络研究[J].计算机技术与发展,2008,18(9):24-27.
Design of Wireless Intelligent Car Control System Based on RT5350 Embedded Platform
WANG Hao
(School of Electrical Engineering, Suzhou Chien-shiung Institute of Technology, Taicang, 215411, China)
With the continuous development of wireless communication technology, embedded application based on WIFI wireless communication comes into being, system is designed based on RT5350 embedded platform and realize PC wireless control intelligent car terminal using the WIFI wireless communication technology. The system is composed of RT5350 embedded communication processing module, motor drive module and a motor module. The experimental results demonstrated that system is easy to operate and high reliability and has a good application prospect.
RT5350; WIFI; PC; intelligent car
2016-10-08
江苏省高等职业院校专业带头人高端研修资助项目(2016GRFX048);2016年度江苏省现代教育技术研究课题(2016-R-49700);太仓市科技计划项目
王 浩(1971-),男,安徽滁州人,苏州健雄职业技术学院电气工程学院副教授.
TP273
A
1672-2590(2016)06-0075-05
