永磁直线同步电动机推力波动的抑制
2016-12-20薛晓明戴白刃钱驰波
薛晓明,戴白刃,钱驰波
(常州信息技术学院,常州 213164)
永磁直线同步电动机推力波动的抑制
薛晓明,戴白刃,钱驰波
(常州信息技术学院,常州 213164)
针对高档数控机床进给系统用永磁直线同步电动机特有的齿槽效应、边端效应所引起的推力波动问题,提出了在应用磁场定向控制技术双闭环结构基础上增加自适应前馈控制器抑制推力波动的新方法。通过实验测量经离散小波变换滤除噪声,得到随直线电机位置变化的实际推力波动波形,基于该波形以查询方式得到补偿电流。给出了控制系统速度控制器、电流控制器、参考电流发生器及前馈控制器的参数设计方法,构造了基于DS1104控制板dSPACE半实物仿真系统实验平台。实验表明,增加自适应前馈控制器对电流进行补偿后,推力波动和速度波动得到了有效抑制,验证了提出方法的正确性和有效性。
自适应前馈控制器;推力波动;离散小波变换;永磁直线同步电机
0 引 言
高速化、精密化和模块化是现代制造技术的发展方向。长期以来,数控机床进给系统主要是旋转伺服电机驱动滚珠丝,存在中间传动机构,会产生弹性变形、摩擦、反向间隙等对系统精度影响的因素。为了克服传统进给系统的缺点,近年来永磁直线同步电动机成为国内外学者研究的热点,它产生直线运动,工作行程不受限制,能进行精确定位,维护方便。由于永磁直线同步电动机(以下简称PMLSM)铁心开槽,且初级绕组铁心长度有限,产生的端部力和齿槽力使得电机推力产生波动,导致电机振动,对机床的定位精度产生严重影响[1]。
为了最大程度减少推力波动,实现精准控制,许多学者提出了相应解决方法,文献[2-3]通过倾斜初级铁心齿槽,优化初级铁心长度,改变次级永磁体形状等措施来降低推力波动。但这些方法降低了电机的输出推力和效率,增加了电机加工难度和制造成本。文献[4-9]通过有限元求解PMSLM推力波动的变化规律,计算出需要的电流补偿值,但有限元分析计算时需要进行很多假设,得到的推力波动曲线与电机实际的推力波动波形有一定的误差,不能实现精确的补偿。
本文在基于磁场定向控制技术电流环、速度环的双闭环结构基础上[10],应用实验装置测量出PMLSM实际推力波动波形,经过离散的小波变换进行滤波,再经过自适应前馈控制器对电流环的给定电流进行实时补偿,从而降低推力波动。
1 PMLSM的数学模型
基于磁场定向控制理论,在dq旋转坐标系中,PMLSM的电压方程:
(1)
(2)
式中:vd,vq为端电压;id,iq为电枢电流;Ld,Lq为交直轴电感;φpm为每相永磁磁链;τ为极距;vr为动子运动速度。
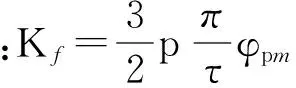
电磁推力方程:
(3)
机械方程:
(4)
式中:M为动子的总质量;B为摩擦系数;Fe为电磁推力;Fd(x)为随动子位置x变化的推力波动函数;FL为负载。
2 推力波动的测量和处理
PMLSM的推力波动与电枢线圈是否通电无关,为了消除摩擦力对测试推力波动的影响,采用如图1所示的往复运动双向测量方案[11]。图1中,直线电机不通电,以0.2m/s的速度匀速移动,力传感器输出的信号经过运算放大电路处理后产生的周期性变化波形如图2所示。
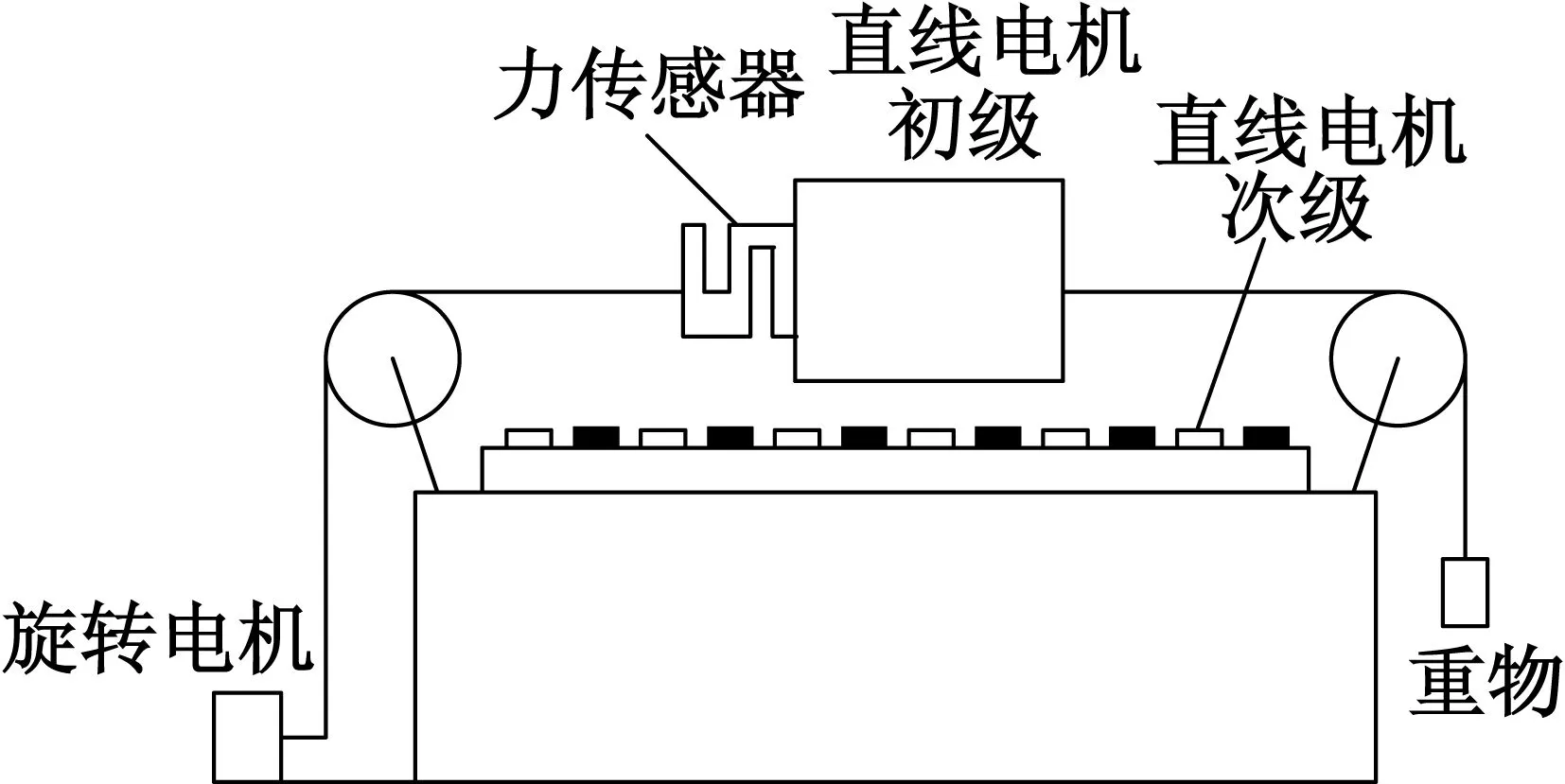
图1 永磁直线电机推力波动测量装置
从图2中可以发现推力波动的测量值存在噪声,为了尽可能保留测量信号的特性,应用文献[12]提出的自适应小波变换方法滤除噪声,平滑后的测试波形如图3所示。

图2 测得的推力波动波形图3 小波变换后测量的推力波动随动子位置变化的波形
3 控制系统的参数设计
基于磁场定向控制包含推力波动补偿的PMLSM控制方框图如图4所示。图4是在传统的基于磁场定向控制速度、电流双闭环结构基础上增加自适应前馈控制器,将参考电流发生器产生的电流和自适应前馈控制器产生的电流合成,作为电流控制器的给定电流,从而达到实时消除推力波动的目的。

图4 提出的PMLSM控制方框图
3.1 电流控制器
q轴电流控制器传递函数如图5所示,其中Kp-iq及Ki-iq为电流控制增益。采用零极点对消方式设计,令Kp-iq/Ki-iq=Lq/R =ωiq,则电流控制器传递函数:

图5 电流控制器传递函数
(5)
观察式(5),电流控制为一阶系统,ωiq为频宽,通常设计为PWM开关频率的1/10[13]。由此,Kp-iq与Ki-iq可计算如下:
(6)
(7)
d轴电流控制器采用类似方法设计。
3.2 速度控制器
速度控制器传递函数如图6所示。一般电流控
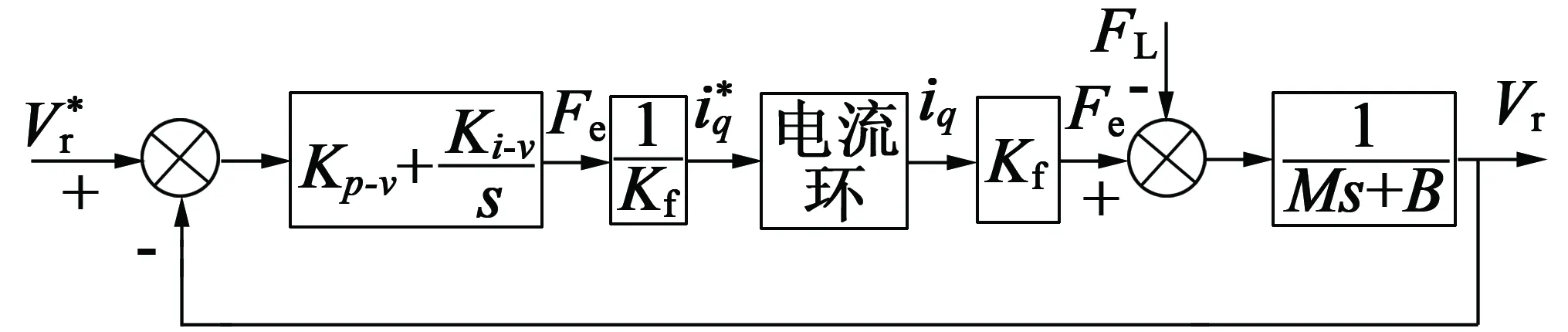
图6 速度控制器传递函数
制器的频宽为速度控制器频宽的10倍以上,电流控制器传递函数可近似为1[13]。若不考虑干扰,则速度控制器传递函数:
(8)
式中:Kp-v与Ki-v为速度控制增益。
设速度回路的频宽为ωv,阻尼比为ξ,则速度控制增益可计算如下:
(9)
(10)
3.3 参考电流发生器
(11)
变换式(11)得参考电流iq:
(12)
3.4 自适应前馈控制器
自适应前馈控制器如图4的虚线部分。把测量后经过小波变换处理的推力波动Fd(x)放在一个查询表中,根据动子位置x从查询表中取出相应的波动推力除以Kf后得到补偿电流iqc:
(13)

4 实验结果分析
为了验证提出方法的正确性,构建了具有电流补偿功能的永磁直线伺服电机的实验平台,如图7所示。样机的控制板采用dSPACEDS1104,功率电
路由带有驱动的6个IGBT组成,IGBT的PWM开关频率为10 kHz,死区时间为20 μs,采样周期为100 μs,速度回路的频宽设定为100 Hz,阻尼比为0.707,电流电路的频宽为1 000 Hz。电机实际电流采用LTS6霍尔电流传感器测量,动子的速度和位置采用磁线性增量编码器测量,测量值通过A/D转换送到dSPACE板。PMLSM样机参数如表1所示。
图8~图10分别显示了在2 s时接入自适应前馈控制器电机交直轴电流、推力和速度变化波形。从图8可以看出补偿前后电流增加,抵消了由PMSLM产生的推力波动。图9中补偿前推力的峰峰值34 N,补偿后推力的峰峰值为12 N,推力波动减少了73%。图10中补偿前速度波动的峰峰值为0.056 m/s, 补偿后速度波动的峰峰值为0.001 4 m/s,推力波动减少了20%。
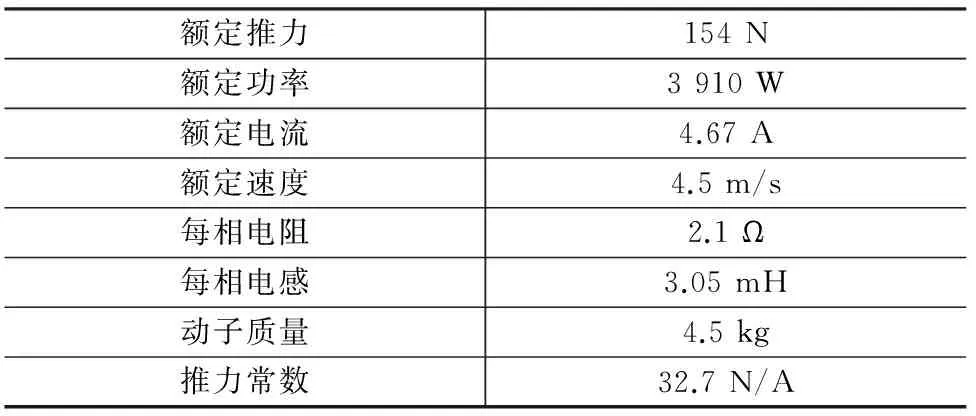
表1 永磁直线同步电动机参数
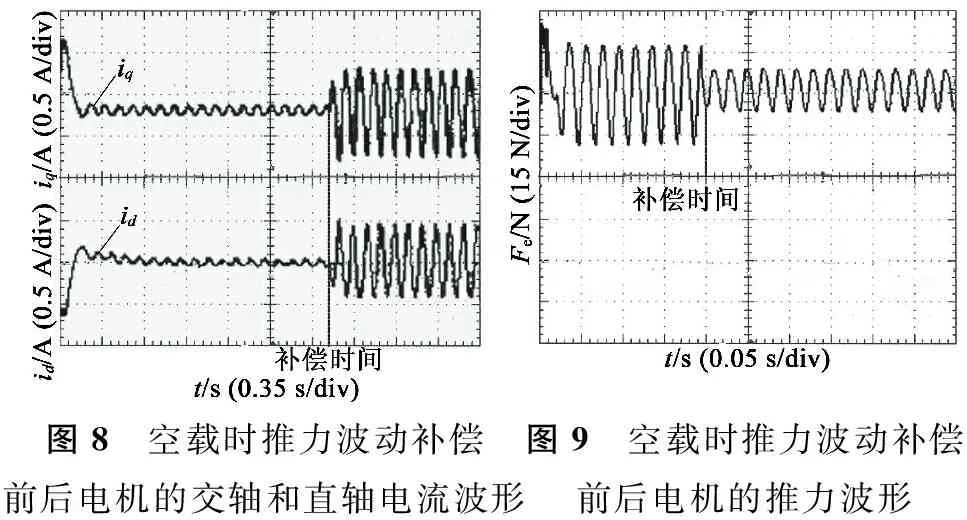
图8 空载时推力波动补偿前后电机的交轴和直轴电流波形图9 空载时推力波动补偿前后电机的推力波形

图10 空载时推力波动补偿前后动子的速度变化
5 结 语
本文提出了在磁场定向控制双闭环的基础上增加自适应前馈控制器抑制PMLSM推力波动的新方法,补偿电流通过实验并经小波变换滤波后获得。实验表明:应用提出的补偿方法推力波动由113%下降到40%,下降了73%;速度波动由26%下降到到6%,减少了20%,推力波动和速度波动得到了有效抑制。
[1] JUNG L S,HUR J,HYUN D S.Performance analysis of skewed PM linear synchronous motor according to various design parameters[J].IEEE Transactions on Magnetics,2001,37(5):3653-3657.
[2] BIANCHI N,BOLOGNANI S.Design techniques for reducing the cogging torque in surface-mounted PM motors[J].IEEE Transactions on Industry Applications,2002,38(5):1259-1265.
[3] ZHU Y-W,JIN S-M,CHUNG K-S,et al.Control-based reduction of detent force for permanent magnet linear synchronous motor[J].IEEE Transactions on Magnetics,2009,45(6):2827-2830.
[4] KIM T,CHANG J H.Analysis of thrust characteristics considering step-skew and overhang effects in permanent magnet linear synchronous motor[J].IEEE Transactions on Magnetics,2015,51(3): 8102104.
[5] 夏加宽,董婷,王贵子.抑制永磁直线电机推力波动的电流补偿控制策略[J].沈阳工业大学学报,2006,28(2):379-400.
[6] CHEN Meiyung,LU Jianshiun.High precision motion control for a linear permanent magnet iron core synchronous motor drive in position platform[J].IEEE Transactions on Industrial Informatics,2014,10(1): 99-108.
[7] 温照方,陈培正,王先逵.高推力永磁直线同步电动机控制中的电流补偿[J].北京理工大学学报,2004,24(3):233-237.
[8] 常九健,马文礼.基于磁场定向控制方式减小永磁直线同步电机推力波动[J].微电机,2011,44(8):41-43.
[9] 章达众,廖有用,李国平,等.永磁同步直线电动机磁阻力最小化研究[J].微特电机,2013,41(10):20-22.
[10] ZHU Jun.The research of sensorless vector control for permanent magnet linear synchronous motor[J].Journal of Computers,2013,8(5):1184-1191.
[11] 周天丰,刘成颖,赵彤,等.永磁同步直线电机定位力测试实验研究[J].微特电机,2013,41(10):20-22.
[12] 姚家扬,罗志增.一种基于新型阈值函数小波去噪方法[J].杭州电子科技大学学报,2015,35(4):80-83.
[13] 薛晓明,陈震.永磁同步电动机控制系统PI参数自动设置方法[J].微特电机,2015,43(10):56-59.
Suppression of Thrust Fluctuation for Permanent Magnet Linear Synchronous Motor
XUEXiao-ming,DAIBai-ren,QIANChi-bo
(Changzhou College of Information Technology,Changzhou 213164,China.)
In order to handle the thrust fluctuation of end effect and cogging effect caused by the feed system of high-end CNC machine with permanent magnet linear synchronous motor, a new method increased the adaptive feed forward controller to control the thrust fluctuation, which was based on the technology of double loop structure application with magnet field directional control, was put forward. After the experimental measurement, the noise was filtered by the discrete wavelet transformation, and the actual waveform of the thrust fluctuation on the position of the linear motor was obtained, the compensation current was get in inquiry mode based on this waveform. The parameters design method of speed controller, current controller, reference current generator and feed forward controller in control system were presented, and the experimental platform was established based on DS1104 control board dSPACE semi-physical simulation system. Theoretical analysis and experimental results show that the proposed method is effective in suppressing the thrust fluctuation and the velocity fluctuation after the adaptive feed forward controller compensating the current, verifying the correctness and effectiveness of the proposed method.
adaptive feed forward controller; thrust fluctuation; discrete wavelet transform; permanent magnet linear synchronous motor
2015-12-28
江苏省常州市科技支撑计划项目(CE20150061)
TM359.4
A
1004-7018(2016)07-0034-03
薛晓明(1964-),男,教授,研究方向为电机控制。
