基于直接转矩控制的永磁容错电机故障补救策略研究
2016-12-20巩瑞春张呼和
宝 金,巩瑞春,李 强,郭 景,张呼和
(1.包头师范学院,包头 014030;2.包头轻工职业技术学院,包头 014030)
基于直接转矩控制的永磁容错电机故障补救策略研究
宝 金1,巩瑞春1,李 强1,郭 景1,张呼和2
(1.包头师范学院,包头 014030;2.包头轻工职业技术学院,包头 014030)
为获得电驱动系统的高可靠性,对六相十极永磁容错电机及其驱动器系统进行了研究。在永磁容错电机的结构特点及数学模型的基础上,分析了电机正常运行与故障状态时的直接转矩控制策略,从而提出基于三相四桥臂的直接转矩控制算法的容错控制策略。实验结果表明:系统在故障态可以获得与正常态相媲美的控制效果,转速、转矩和定子磁链几乎无波动,实现了容错控制,验证了基于直接转矩控制的容错控制算法的可行性。
高可靠性;永磁容错电机;三相四桥臂;直接转矩控制
0 引 言
在航空航天、风力发电、高速动车、新能源汽车等对安全性能要求较高的场合中,电驱动系统的可靠性显得尤为重要,这些场合要求电机及其驱动系统具有良好的安全性能,因此,该方面的研究受到越来越多的关注和认可[1-2]。
现有实现电机及其驱动系统高可靠性的方法分为两大类。第一类为余度技术。余度技术通过冗余来提高系统可靠性;有两种结构:并联式和串联式,其结构清晰、原理简单、控制简单易行;但双余度电机控制不具备故障隔离的能力、且故障发生后,剩下的余度一般要降额使用。第二类为容错技术。为提高双余度电机控制技术,采用非备份式的容错技术,设计并实现具有高可靠性容错电机控制系统有很重要的现实意义[2-4]。
本文将三相四桥臂直接转矩控制算法(SVM-DTC)应用于六相十极永磁容错电机中,在容错电机数理模型的基础上,对逆变器故障与电机绕组故障进行了分析,最后对电机绕组正常态与故障态(短路、开路)提出三相四桥臂的直接转矩容错控制策略,并进行实验,验证了容错算法可以保证转速、转矩和定子磁链几乎无脉动,系统实现了短路后的强容错控制。
1 永磁容错电机简化物理模型
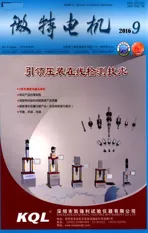
六相十极永磁容错电机的剖面结构如图1所示。电机定子齿采用极靴结构,绕制的方式为隔齿,绕组依次相差60°分布,使电机对电磁、物理、热等有很好的隔离效果。为达到抑制短路电流幅值的目的,对磁路进行特殊处理,使电机绕组漏感较大。
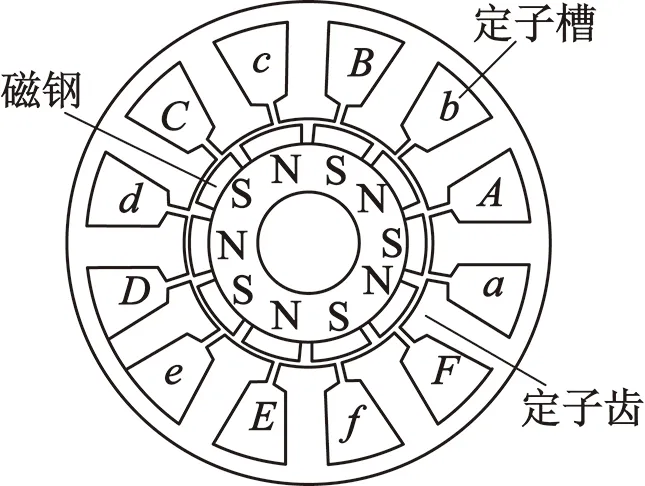
图1 六相绕组依次相差60°分布结构图
在对三相四桥臂的直接转矩控制算法的容错控制策略进行分析时,以六相十极永磁容错电机的特点,建立相应的数学模型。为了简化分析,首先作如下假设[2,5]:
(1)磁路线性,忽略涡流、磁滞损耗和导线的集肤效应;
(2)转子绕组阻尼等于零,忽略永磁材料电导率;
(3)空间磁势和磁通呈正弦规律变化;
由于永磁容错电机具有很强的磁隔离特点;可以忽略各相绕组之间互感。同时采用独立H桥驱动永磁电机各相绕组,因此各相绕组之间电气上也相对独立。以A相绕组为例,其电路简化模型如图2所示,其电压方程可表示:
(1)
式中:p为微分算子;R为相电阻;L为相同步等效电感;ua,ub,uc,ud,ue,uf分别表示六相绕组定子端电压;ea,eb,ec,ed,ee,ef分别表示六相绕组永磁体反电势;ia,ib,ic,id,ie,if分别表示六相绕组定子电流。
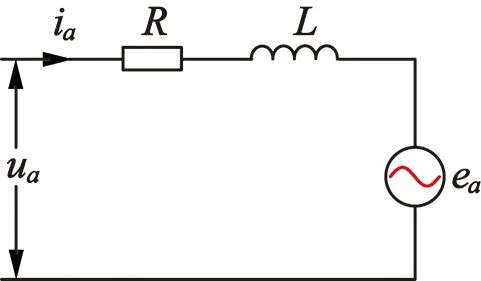
图2 A相绕组简化模型
如果磁链在电角度为0°的时候,A相绕组匝链永磁体磁链最大,可得反电势和磁链的表达式:
(2)
式中:ψa,ψb,ψc,ψd,ψe,ψf表示六相绕组反电势磁链;ψm为永磁体磁链幅值;θ为电角度;p为转子极对数。
根据功率平衡原理,可以得到六相十极永磁容错电机电磁转矩Te的表达式:
(3)
式中:ω为机械角速度。
2 永磁容错电机故障补救策略
2.1 正常运行条件下的控制策略
在本文中,只对六相电机的一套绕组ABC进行分析。以一套绕组ABC为例,正常运行条件下,基于直接转矩控制的永磁容错电机控制框图如图3所示,转速环的输出作为转矩给定值,转矩环的输出作为定子磁链位移角[6-7]。
图3 正常态永磁容错电机直接转矩算法控制框图
同矢量控制相比,直接转矩控制不存在电流环,被控对象为电机转矩,转矩动态响应快。本文采用的永磁容错电机为表贴式隐极电机,转矩表达式可表述:
(4)
式中:p为极对数;ψs为定子磁链幅值;ψf为转子磁链幅值;δ为转矩角(即空间上ψs与ψf的角度差)。
由式(4)可以看出,如果能保持定子磁链幅值|ψs|不变,对电动机而言,δ控制在0 ~ π/2的范围,电磁转矩Te随着转矩角δ的增大而增大。
正常运行条件控制的核心在于:在定子磁链幅值恒定时,通过调节转矩角的大小可以迅速控制转矩。
定子磁链与空间电压矢量的关系还可表述:
(5)
忽略定子电阻有:
(6)
如图4所示,在一个控制周期内,通过给定合适的空间电压矢量,可以快速改变定子磁链的幅值和位置:
usTs≈ψs(k+1)-ψs(k)
(7)
式中:ψsk为这一周期定子磁链;ψs(k+1)为作用空间电压矢量后的下一周期定子磁链。

图4 正永磁容错电机直接转矩控制原理示意图
2.2 故障运行条件下的控制策略
当发生断路或短路故障后,相应故障相桥臂和绕组被隔离,所以系统实际工作在两相两桥臂的状态。以C相绕组故障隔离后为例,图5(a)为绕组断路并隔离后,图5(b)为绕组短路并隔离后。另外,如果是功率管断路或短路故障,故障隔离后系统和图5(a)一致,分析与绕组断路隔离一致,在下文中归类到绕组断路故障,不再单独分析。
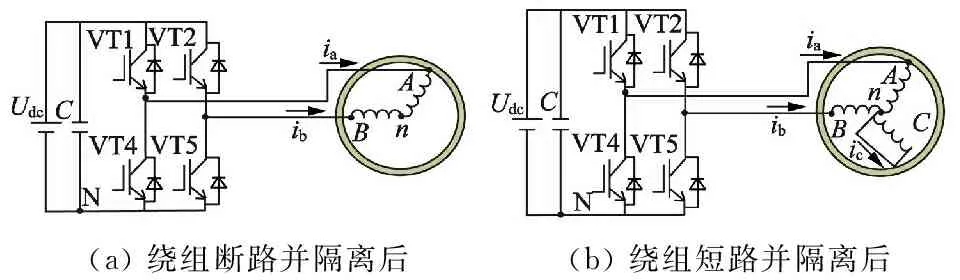
(a)绕组断路并隔离后(b)绕组短路并隔离后
图5 故障隔离后永磁容错电机控制系统
不论是断路还是短路,空间电压矢量均:
(8)
故障并隔离后,空间电压矢量不能够对定子磁链进行准确控制。而对直接转矩控制而言,若定子磁链幅值一旦失控,最终导致转矩失控控制系统就会不稳定,系统失控[8-9]。所以,在发生故障后隔离,应采取合适的方法重新构成合适的空间电压矢量,保证直接转矩系统维持稳定运行。
针对三相全桥逆变器空间电压矢量重构的问题,早在2004年就有一种方法被提出,逆变器拓扑如图6(a)所示。其在三相全桥逆变器的基础上增加一个由两个电容串联组成的附加桥臂,三相电机绕组通过双向晶闸管连接到电容组成的附加桥臂中点。当系统正常工作时,双向晶闸管不工作,逆变器和传统三相全桥无异;当一相桥臂发生短路故障或断路故障时,双向晶闸管触发开通,将故障相桥臂控制的电机绕组与母线电容中点相连,如图6(b)所示。
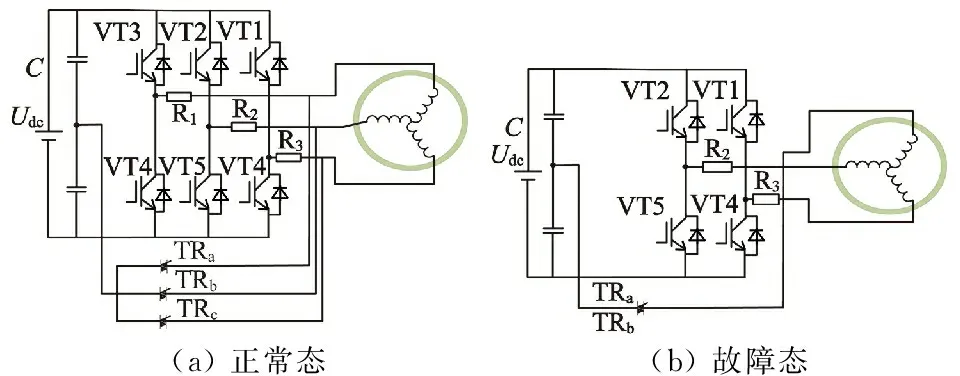
(a)正常态(b)故障态
图6 三相四开关容错拓扑
当系统故障隔离后,需要对空间电压矢量进行重构,如图7所示。空间矢量被4个空间电压矢量分成四个区域,以第II扇区为例,当定子磁链处于第II扇区时,选择U1、U4,表示增加转矩,减小定子磁链幅值;选择U2、U3,表示减小转矩,增加定子磁链幅值。按照这样的规律,最终得到新的空间电压矢量开关表。
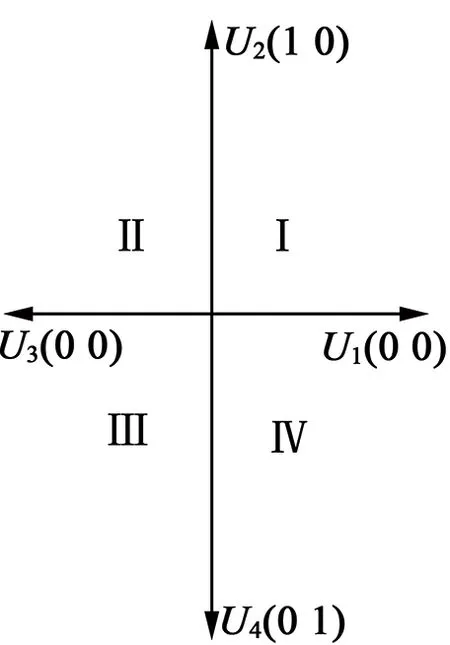
图7 三相四开关拓扑下的空间电压矢量重构
上述空间电压矢量重构方法充分考虑了直接转矩控制的特点,揭示了直接转矩控制方法本身的容错潜能。但是,三相四开关拓扑不光需要增加双向晶闸管、熔断丝等附加器件,增加了系统成本,而且,利用母线电容串联的方式来构造桥臂中点会导致电容电压不平衡的问题。进一步地,上述方法只针对逆变器故障,对绕组故障并不适应。
因此,本文将三相四桥臂拓扑应用于故障隔离后。图8给出了故障补偿后的拓扑,即故障相对应桥臂被切除,绕组中心点连接至第四桥臂。
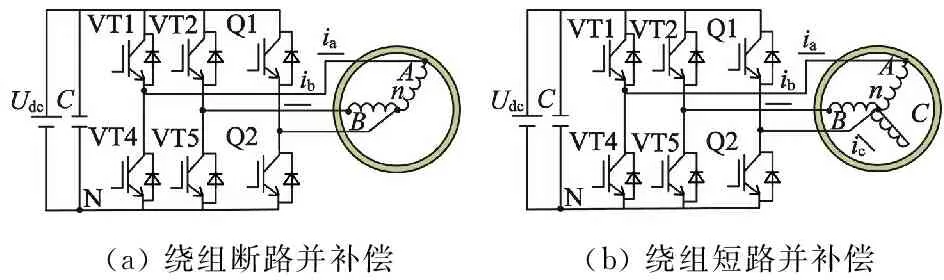
(a)绕组断路并补偿(b)绕组短路并补偿
图8 故障补偿后永磁容错电机控制系统
此时式(8)仍然成立。直接采用故障相的PWM信号去控制第四桥臂的功率管器件Q1/Q2,即可产生需要的电压矢量(SaSbSc),相比于正常状态,各相电压发生了变化,但空间电压矢量的幅值和位置都没有改变。即通过硬件重构后,不论是断路故障还是短路故障,都仍能使用之前的空间电压矢量表,不再需额外软件算法就完成了故障隔离后空间电压矢量的重构。
以C相绕组为例,根据电流的3s/2r变换,当系统发生绕组断路故障时,断路相绕组C1的电流为零,产生电磁转矩的相绕组为剩余的非故障相。因此,当系统发生某一相断路故障时,该相电流等于0;当系统发生绕组短路故障时,短路电流最终稳定在永磁容错电机短路电流值,该电流产生脉动电磁转矩,因此逆变器中产生转矩的相为剩余两相非故障绕组和短路相绕组。
3 实验结果与分析
本文采用三相四桥臂直接转矩控制方法对永磁容错电机进行了实验验证。电机参数见表1所示,实验平台示意图如图9所示,主要器件有:三相四桥臂控制器,六相永磁容错电机、随速度变化的负载、调压器、整流桥、空气开关等。
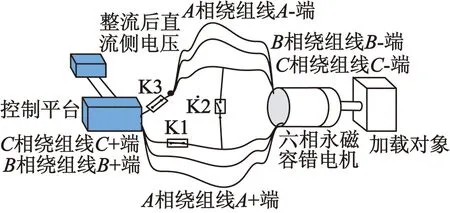
图9 实验平台示意图
当进行正常态实验时,空气开关K1闭合, K2与K3断开。当进行断路不补偿实验时,空气开关K1、K2、K3都断开,即模拟C相绕组断路,并将C相绕组与C相对应桥臂切开。当进行断路补偿实验时,空气开关K3闭合,绕组中心点连接至第四桥臂,将K1、K2断开,C相绕组从C相对应桥臂。当进行短路不补偿实验时,空气开关K2闭合,K1断开,即模拟C相绕组短路并从第四桥臂切除。当进行短路补偿实验时,类似于断路不补偿,在将C相绕组短路并隔离后,同时将绕组中心点接至第四桥臂。
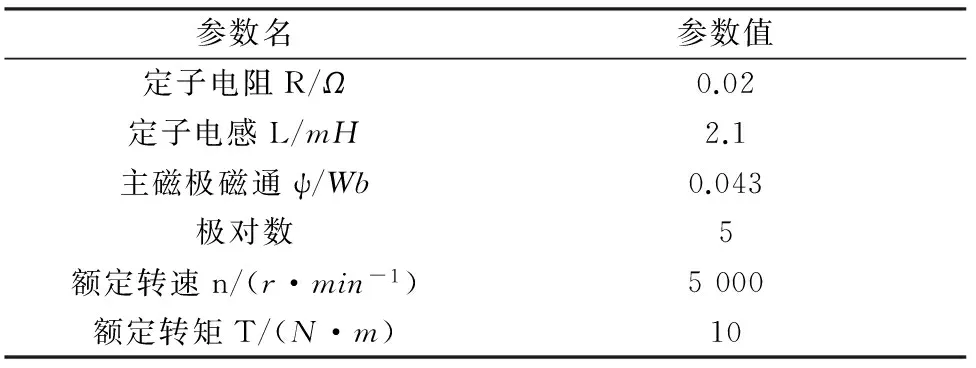
表1 电机参数表
3.1 六相容错电机正常运行实验
电机正常运行时,给定|ψs|*=0.044 Wb,n*=500 r/min,转速跟踪给定,定子磁链幅值跟踪给定,电机正常运行时的相电流如图10所示,电流幅值为5 A,正弦度良好,且直轴电流id≈0.2 A。转矩脉动误差约为13%,转速脉动误差约为3%,定子磁链幅值脉动误差约为2%。
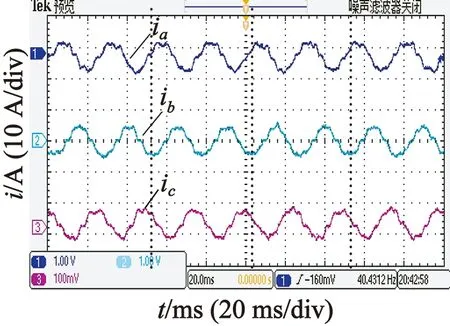
图10 正常态时电机相电流
3.2 六相容错电机断路运行实验
以C相绕组断路为例进行实验,并且以下实验中定子磁链幅值给定均为优化值。
当断路不补偿时,从理论分析和仿真结果中已经得知,此时电机转速转矩脉动增大,且系统容易失控。为安全起见,给出低速低转矩下的一组实验波形以示意。
在电机正常运行在稳态时,断开空气开关K1模拟断路故障状态,图11给出n*=400 r/min时的电流。
当电机正常运行在稳态时,断开空气开关K1,同时闭合开关K3,即对电机断路故障做出相应补偿,图12给出了断路补偿后的电流。C相电流为零,剩余A、B两相电流幅值几乎相等,近似为14 A,约为正常态的1.7倍;第四桥臂电流为28 A,约为正常态的3.5倍。

图11 断路不补偿三相电流
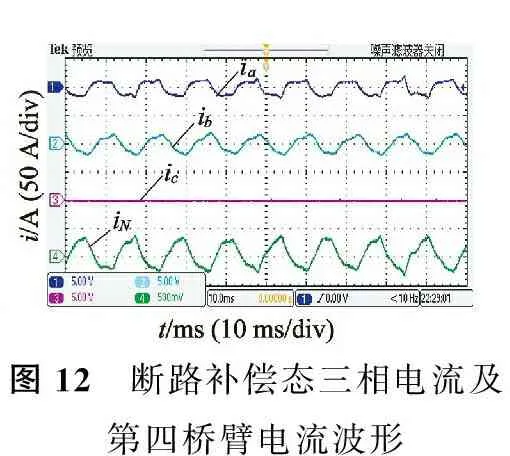
图12 断路补偿态三相电流及第四桥臂电流波形
综上,断路补偿后,相比于断路不补偿,电机可以维持稳定运行。并且与正常态相比,虽然转矩脉动有所增加,但转速脉动几乎不变,实现了永磁容错电机直接转矩控制系统断路态容错控制。
3.2 六相容错电机短路运行实验
以C相绕组短路为例进行实验,并且以下实验中定子磁链幅值给定均为优化值。
从理论分析和仿真结果中已经得知短路不补偿时,电机转速转矩脉动增大,且系统容易失控。与断路类似,为安全起见,实验仍在低速低转矩下进行。在电机正常运行时,闭合空气开关K2同时断开空气开关K1。在进行若干次实验后,电机都会停机,且并未发生过流过压保护现象。
这说明短路不补偿时转速转矩更容易失控,且比断路不补偿时的情况更为复杂。
以n*= 500 r/min为例,给出短路补偿时的实验结果。当电机正常运行时,在闭合空气开关K2的同时闭合K3,并断开K1,图13给出了电机三相电流与第四桥臂电流。
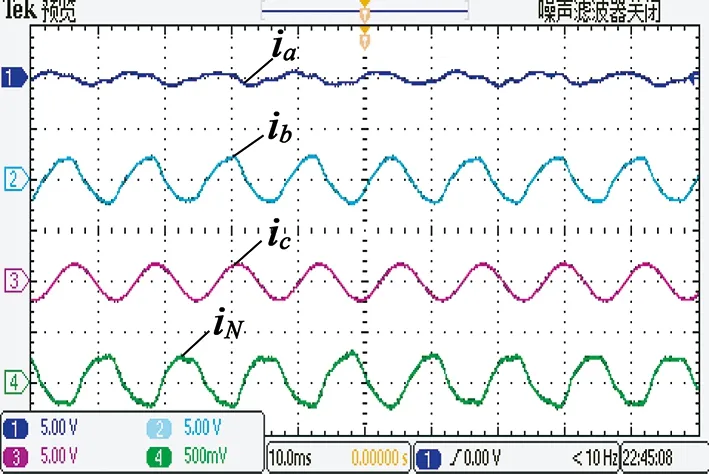
图13 短路补偿态三相电流和第四桥臂电流波形
因容错电机特殊的设计,C相短路电流得到抑制,幅值稳定在18 A;剩余A、B两相电流不均衡,其中A相电流幅值为8 A,与正常态相比几乎不变;B相电流幅值为20 A,约为正常态的2.5倍;第四桥臂的电流为25 A,约为正常态的3倍。
综上,相比于短路不补偿,短路补偿后电机运行正常且稳定。并且与正常态相比,定子磁链幅值脉动误差,转矩脉动误差以及转速脉动误差都几乎不变,实现了永磁容错电机SVM-DTC系统短路态容错控制。
4 结 语
本文完成了对基于三相四桥臂的直接转矩控制系统的实验验证。当系统处于正常态时,实验结果表明低速时定子磁链也得到了很好的观测与控制,证明了基于电流模型的定子磁链观测器的可行性。并且,对给定定子磁链幅值的优化后,直轴电流id几乎为零,减小了定子电流损耗。当一相绕组断路并采取补偿措施后,与正常状态相比,实验结果表明转速脉动几乎不变,转矩脉动与定子磁链脉动略有增大,系统实现了断路后的容错控制。当一相绕组短路并采取补偿措施后,与正常态相比,实验结果表明转速、转矩和定子磁链几乎无脉动,系统实现了短路后的容错控制。
[1] 徐晓玲,彭伟发,陆荣秀.电机定子绕组故障容错控制概述[J].微电机,2015,43(3):81-85.
[2] 朱景伟,刁亮,任宝珠,等.具有冗余特性的永磁容错电机短路故障分析与控制[J].电工技术学报,2013,28(3):80-86.
[3] CAO Wenping,MECROW B C,ATKINSON G J,et al.Overview of electric motor technologies used for more electric aircraft (MEA)[J].IEEE Transactions on Industrial Electronics,2012,59(9):3523-3531.
[4] 郝振洋,胡育文,黄文新,等.永磁容错电机最优电流直接控制策略[J].中国电机工程学报,2011,31(6):46-51.
[5] DWARI S,PARSA L.Optimum fault tolerant control of multi-phase permanent magnet machines for open -circuit and short-circuit faults[C]//APEC 2007.IEEE,2007:1417-1422.
[6] LIU T H,FU J R,LIPO T A.A strategy for improving reliability of field-oriented controlled induction motor drives[J].IEEE Transactions on Industry Applications,1993,29(5):910-918.
[7] FU J R,LIPO T A.Disturbance-free operation of a multi-phase current regulated motor drive with an open phase[J].IEEE Transactions on Industry Applications,1994,30 (5):1267-1274.
[8] MOHAMMADPOUR A,SADEHI S,PARSA L.A generalized fault-tolerant control strategy for five-phase PM motor drives considering star,pentagon,and pentacle connections of stator windings[J].IEEE Transactions on Industrial Electronics,2014,61(1): 63 -75.
[9] 王永兴,温旭辉,赵峰.六相永磁同步电机缺相容错控制[J].电工技术学报,2015,30(5):49-58.
Research on the Fault Recovery Strategy Based on Direct Torque Control for Fault Tolerant Permanent Magnet Motor
BAOJin1,GONGRui-chun1,LIQiang1,GUOJing1,ZHANGHu-he2
(1.Baotou Teachers' College, Baotou 014030, China; 2.Baotou Light Industry Vocational Technical College, Baotou 014030, China)
In order to meet the requirement of aviation power actuator systems' high reliability, the topology of a six-phase ten-pole fault tolerant permanent magnet motor drive system was introduced.Based on the introduction of its structural features and the mathematical model, the direct torque control strategy when motor under normal and fault conditions were analyzed.The fault tolerant control strategy under direct torque control system based on the three-phase four-leg was proposed.Experimental results show that when the system was in fault condition, compared with the normal state, the speed ripple, torque ripple and the stator flux chain ripple were almost unchanged, and the fault tolerant control strategy under direct torque control system was verified practicability..
high reliability; fault tolerant permanent magnet motor; three-phase four-leg; direct torque control
2015-11-20
内蒙古自然科学基金项目(2016MS0522)
TM351
A
1004-7018(2016)09-0092-05
宝金(1977-),男,硕士,讲师,研究方向为电力电子技术及应用。