直线超声波电动机嵌入式机器人手指驱动实验研究
2016-12-20章成武李朝东
章成武,张 露,李朝东
(上海大学,上海 200072)
直线超声波电动机嵌入式机器人手指驱动实验研究
章成武,张 露,李朝东
(上海大学,上海 200072)
首先介绍了卧板式直线超声波电动机的结构和工作原理,按照嵌入驱动的思路进行了一款二指机械手的机构设计和受力分析,制作了样机。经过实验考察了该机械手的夹持物体能力,验证了卧板式直线型超声波电动机应用在机器人手指上的可行性。
压电超声波直线电动机;嵌入式驱动;二指机械手;机构设计;搓捏动作
0 引 言
目前常用的机器人大多采用电磁式伺服电机、气动或液动等装置来驱动末端执行器。比如日本研制的Okada机械手[1],它采用了电机驱动,此机械手的运动和力传递是通过钢丝绳和滑轮来实现的。另外,还有美国斯坦福大学研制的STD/JPL[2]多指灵巧手,它的每个手指关节的驱动都是由电机通过绳索来完成的。当驱动器采用电机配备减速齿轮箱时,其优点是它能安装在各种类型的机械臂上;缺点是把此类驱动器安置在手指内时,机械手尺寸会受到限制,也存在着能量损耗等影响。当采用远端钢丝绳驱动关节时,其优点是可利用高功率的驱动器产生大的驱动力;缺点是响应速度相比直接驱动变慢。
随着新型功能材料不断出现,采用压电超声波电动机成为一种新的机器人关节驱动解决方案。超声波电动机具有以下显著特点[3]:(1)结构紧凑,设计灵活,转矩密度大;(2)通过超声波电动机来实现直接驱动,可以显著地提高系统的定位精度和加快响应速度;(3)若压电材料和摩擦材料选用合适,可在高、低温等极端环境下工作。因此,若采用超声波电动机驱动机器人关节,可将其全部置于手掌内,形成独立的手部结构。另外,它可直接驱动机械手关节,改善关节驱动性能。
机器人关节采用超声波电动机驱动的最大意义在于:它可大大地简化机器人关节的结构,使其变得轻便、更紧凑,从而改善机器人的动力学性能[4]。因此,本文探索了卧板式超声波直线电动机在机械手关节驱动中的可能性。首先介绍了其结构和原理,然后试制了一款机械手样机,最终通过实验完成了笔套夹持实验,验证了超声波电动机驱动机械手的可行性。
1 电机的结构及工作原理
1.1 电机的结构
文中选用的为本实验室设计的一种驻波型卧板式压电直线超声波电动机,最佳工作频率为64 kHz,工作电压峰峰值为150 V。其轮廓结构如图1所示[5],外形尺寸为长36 mm,宽5 mm,高4 mm。中间为铝合金材质弹性体,弹性体上下表面分别粘贴有压电陶瓷。
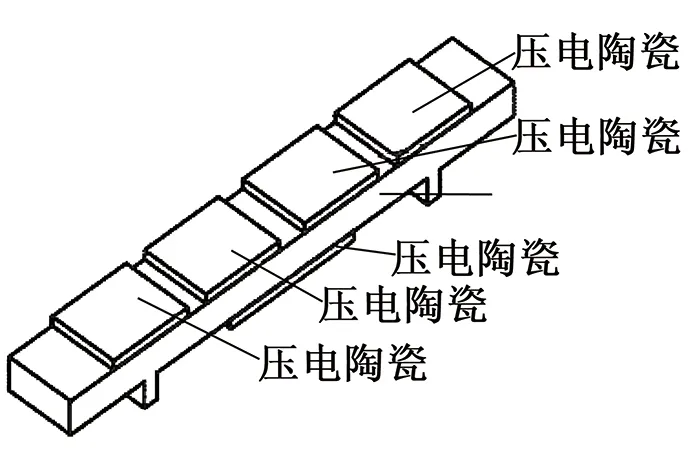
图1 卧板式直线型超声波电动机结构示意图
1.2 电机的工作原理
采用两个相位差为90°的特定频率正弦电压,将它们施加到电机上下表面粘贴的压电片上。此时,电机下表面的一片压电陶瓷片在弹性体上激发出水平方向的一阶纵向拉伸模态,上面的4片压电陶瓷片激发出垂直方向的四阶弯曲模态。通过此两种模态的复合,在与导轨接触的两齿上就会产生相位差为180°的椭圆运动。与此同时,持续地将机械负载垂直加载到弹性体上,就会产生摩擦力。通过摩擦力的作用,与卧板式超声波电动机弹性体相接触的动子(比如导杆)就可以实现直线移动[6]。
通过FEA软件Algor对此电机的模态分析,得出图2中的有限元分析结果。其纵向拉伸的振动模态频率在63 kHz左右,横向弯曲的振动模态频率在64 kHz左右。另外,通过实验测试,得到电机在不同预压力下的机械特性试验结果[7],如图3所示。
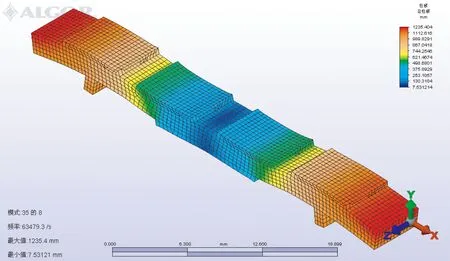
(a) 纵向拉伸振动模态 63.479 kHz

(b) 横向弯曲振动模态 64.485 kHz
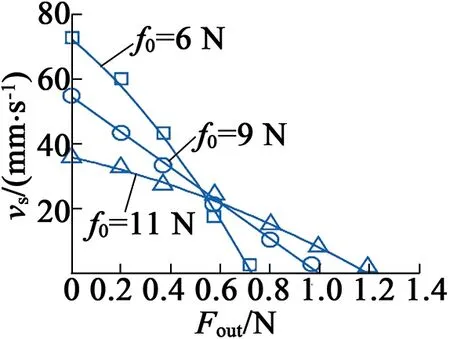
图3 不同预压力下电机机械特性试验结果
2 机械手结构设计
2.1 总体方案与布局
参考曲柄滑块机构,当把滑块作为原动件,此时的摇杆在平面内做转动。由于卧板式超声波电动机的输出为直线运动,所以当把这一直线运动作为输入的动力时,摇杆可以完成在平面内的转动。因此,本文提出如图4所示的机构简图,拟设计的手指方案如图5所示。通过导轨驱动连杆,连杆带动摇杆转动,即可以实现手指的运动。另外,因为背衬封装结构可以提高卧板式超声波直线电动机的输出力[8],所以在设计中采用了分布式背衬进行预压。
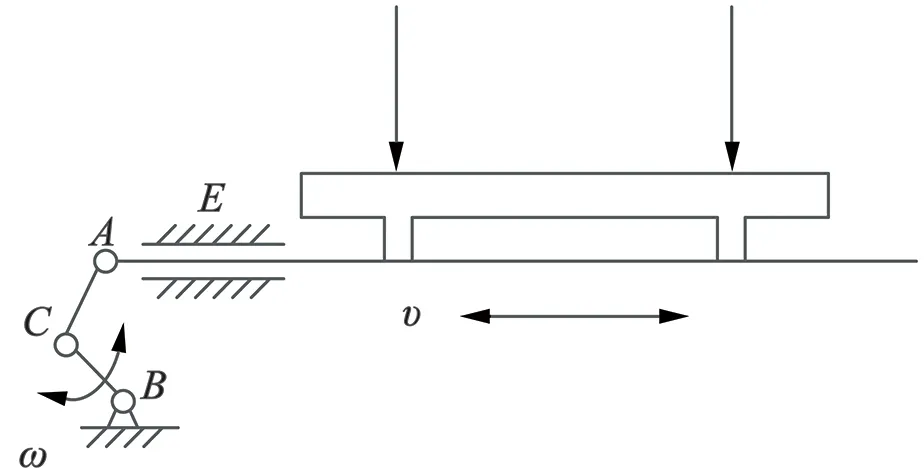
图4 机构简图
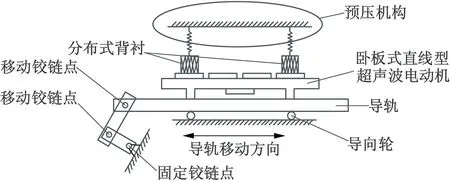
图5 机器人手指结构设计
2.2 机构运动学和受力分析
假设导轨杆的输出速度为va,则其在杆AC上的分速度为va·cosα。假设铰链C的速度为vc,则其在杆AC上的分速度为vc·cosβ。根据理论力学速度投影定理,A点和C点在AC上投影相等,即:

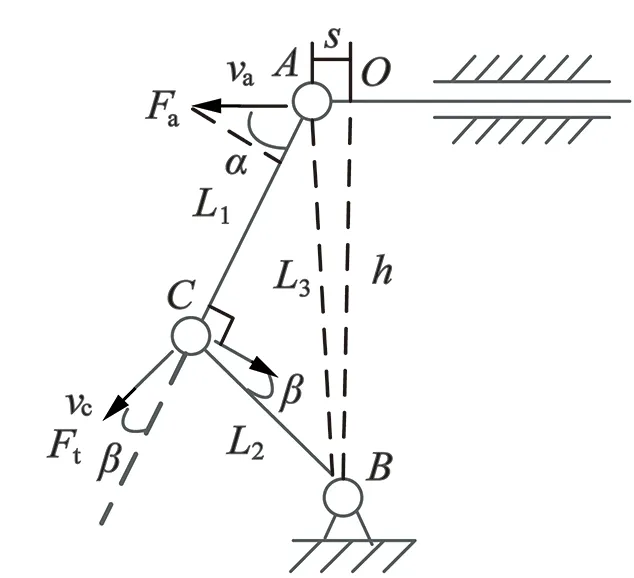
图6 机构的运动分析图
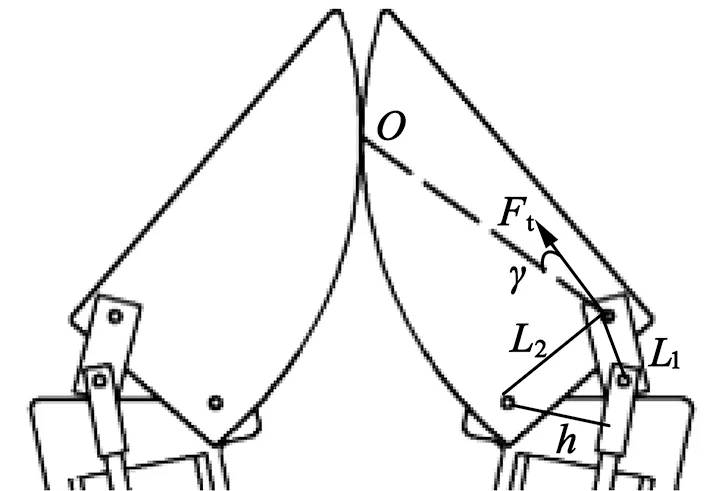
图7 手指机构受力分析简图
因为杆AC受到的力为:
所以杆BC受到的切向力为:
假设零件被夹持在图7所示的O点,与力Ft夹角为γ,则为了夹持住零件,由公式:
得零件电机推力与重量关系为:
式中:μ为手指材料与零件之间的摩擦系数。
2.3 手指关节机构设计
本文所设计的机械手指有两个关节,分别是驱动关节和转动关节。卧板式直线超声波电动机内置在驱动关节中,它在弹性局部背衬的作用下驱动直线导轨。导轨通过小滑块与连杆相连,连杆与手指外壳通过铰链连接,手指外壳与底座通过铰链连接,如图8所示。

图8 手指关节总装结构图
3 机械手样机制作和性能测试
3.1 二指机械手试制
为验证设计方案的可行性,本文根据以上设计制作了一款样机,如图9所示。在该样机中,导轨的往复直线运动驱动手指关节绕固定点转动,从而实现整个机构单自由度旋转。在机构设计中,考虑到电机的行程以及电机的输出速度,则可确定相关结构的尺寸。另外,为克服死点附近较大的阻力,改进了小滑块的结构。

图9 机械手双指样机
3.2 机械手性能测试
将二指机械手接入测试电路进行联动测试。信号发生器输出两路正弦信号,经过两个高频功率放大器,加载到手指上,两个直线电机并联接入电路中。为实现机械手夹持笔套动作,分别对两个手指加载一正一负的正弦电压。通过调整正弦信号的频率,同时根据手指实际运动情况调整加载在电机上的预压力,即可改变手指运动速度。观察两个手指的运动状态,在调试出比较理想的联动状态之后,将一个直径约为20 mm的笔套(内含不同重量的砝码)夹在它们之间,最终发现手指的最大夹持重量为20 g的砝码。
实验结果发现,两个电机共同的最佳共振频率在60~61 kHz之间。当电压加到200 V(峰峰值),频率为61.02 kHz时,机械手成功转动塑料笔套,完成“搓”的动作,运行状态良好且速度较快,图10为笔套在手指间运动的3个位置对比图。在此过程中,此二指机械手的手指会绕着固定点作转动运动。即B1C1与水平方向的夹角从10°转动到48°,相应的另外一个手指B2C2与水平方向的夹角从44°转动到5°,如图11所示的手指输出轨迹曲线。

图10 笔套运动位置对比图
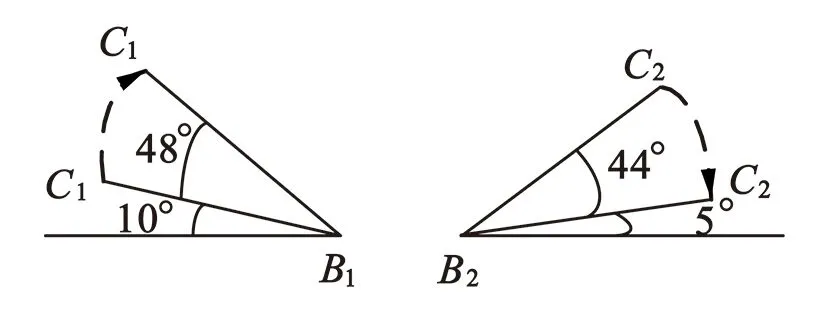
图11 机械手两指输出运动轨迹
4 结 语
本文首先介绍了卧板式直线超声波电动机的结构及其工作原理,然后对机械手进行了总体结构设计并建出模型,最后试制了一款二指机械手。实验结果表明,二指机械手可以完成夹持笔套动作,基本实现了双指机械手样机的预期操作动作。
实验也证明了直线超声波电动机在机械手关节驱动中的可行性。但同时也发现电机输出力/力矩的范围还不够宽,因此它更适合作为小型的关节驱动。而这种小型直接驱动机器人在航天工程、生物、医学、微型制造、集成电路制造和VLSI 装配等方面已有广泛的应用[9],所以未来直线超声波电动机会在太空机器人、生物医疗机器人等应用方面具有广阔前景。
[1] 贺晋华.内嵌式形状记忆合金拟人机械手指驱动控制研究[D].武汉: 华中科技大学, 2007.
[2] ZHOU Huaping,ZHANG Peng,ZHANG Liangqi.Coordinated planning and control for multifingered robot hand[C]//Proceedings of the IEEE International Conference on Industrial Technology (ICIT'96).IEEE,1996: 498-502.
[3] 李朝东.直线型压电驻波超声波电动机的研究[D].南京:南京航空航天大学,1998.
[4] 帅双辉.超声波电动机驱动机器人鲁棒性控制研究[D].南京:南京航空航天大学,2007.
[5] 李朝东,何晓菁.卧式板型直线超声波电动机的微型化[J].光学精密工程,2010,18(4):887-892.
[6] RHO J S, KIM B J,LEE C H,et al.Design and characteristic analysis of L1B4 ultrasonic motor considering contact mechanism[J].IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control,2005,52(11):2054-2064.
[7] 张健滔,李朝东,何晓菁.卧板式直线超声波电动机的特性分析模型[J].中国电机工程学报,2012,32(18):137-144.
[8] 张露,李朝东.背衬封装对卧板式直线超声波电动机输出推力影响[J].振动与冲击,2013,32(11):137-140.
[9] LYSHEVSKI S E.Non-linear control of advanced direct drive robots: theory and experiments[J].International journal of Control,2001,74(6):638-647.
Experimental Study of Piezoelectric Ultrasonic Linear Motor Embedded Driving Robot Finger
ZHANGCheng-wu,ZHANGLu,LIChao-dong
(Shanghai University,Shanghai 200072,China)
The structure and working principle of a board-type horizontal piezoelectric linear ultrasonic motor were introduced.According to the idea of embedded driving, the structure design and the force analysis of a two-finger manipulator was carry out, and its prototype was proposed.The experiment demonstrates the ability of its griping object, and the feasibility that board-type horizontal linear ultrasonic motor can be used to drive the robot finger.
piezoelectric ultrasonic linear motor; embedded driving; two fingers manipulator; mechanism design; twist-pinch action
2016-01-14
国家自然科学基金项目(51577112)
TM359.4
A
1004-7018(2016)09-0026-03
章成武,男,硕士研究生,研究方向为直线超声波电动机。