横向磁通开关磁阻电机间接位置检测方法
2016-12-20姜亚海瞿遂春邱爱兵
姜亚海,瞿遂春,邱爱兵,陈 飞
(南通大学,南通 226019)
横向磁通开关磁阻电机间接位置检测方法
姜亚海,瞿遂春,邱爱兵,陈 飞
(南通大学,南通 226019)
提出一种横向磁通开关磁阻电机间接位置检测方法,实现TFSRM起动相的确定及低速运行时正确换相。起动时各相同时注入高频脉冲电压,计算出电感值,再由逻辑关系确定起动相;在低速运行时,对下一导通相注入高频脉冲电压,同时检测该相电流,当相电流达到换相阈值后即可执行换相。该方法无需大量计算、算法简单。最后在MATLAB环境下建立了三相TFSRM系统的仿真模型,并进行了仿真,仿真结果验证了该方法的可行性。
横向磁通开关磁阻电机;间接位置检测;电感分区;脉冲注入
0 引 言
横向磁通开关磁阻电机(Transverse Flux Switched Reluctance Motor,以下简称TFSRM)。具有转矩密度高、低速性能好、容错能力强等优点,适用于大功率、低转速、直接驱动场合[1]。对于TFSRM驱动系统,位置检测是保证电机正常运行的基础,通常采用外装光电式或磁敏式位置检测器[2],实现位置检测。这种有位置传感器的检测方法限制了电机的应用场合,降低了系统的可靠性[3],因此经济实用的无位置传感器技术成为目前研究的热点问题之一。
很多学者在无位置检测方面做了大量研究,并在中、高速场合取得了一些研究成果,但在起动和低速区无位置传感器研究较少。文献[4]通过检测自举电容充电电流达到峰值的时间来确定起动相,该方法对控制要求较高;文献[5]通过拟合曲线的方法确定电流与角度位置关系,然而很难得到精确的电流与角度位置曲线,并且三次以上的拟合方法比较复杂。随着研究的深入一些智能算法也被应用到位置检测中。例如,神经网络控制该方法不需要具体模型[6],只要有足够的数据,通过不断的训练可以逼近目标函数,但该方法计算量大,训练需要大量时间。文献[7]将神经网络和小波分析应用到转子位置估算策略中,也有局限性,收敛速度慢、隐含层数目难确定且系统复杂。本文采用低阈值电感分区结合注入高频脉冲的方法确定起动相以及实现低速运行时准确换相。该方法无需大量存取信息且算法简单。
1 TFSRM起动相检测方法
1.1 低阈值电感分区法原理
图1所示为三相16极的TFSRM结构图,对其理想电感曲线进行分区,在电感极值点与交差点处将一个机械周期22.5°分为6个区,每个分区3.75°,如图2所示。由三相电感值可确定转子所在区间。
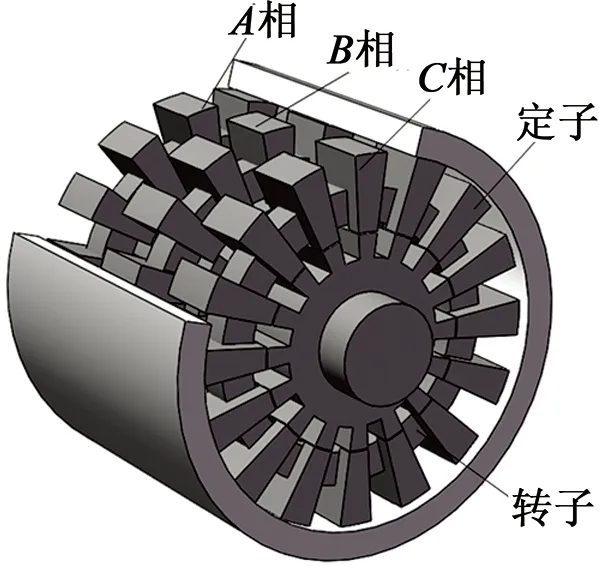
图1 三相16极 TFSRM结构图
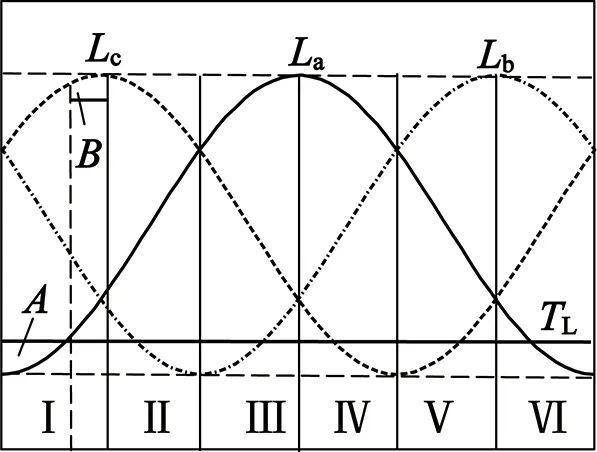
图2 低阈值电感分区图
由电感分区图可知在Ⅱ、Ⅳ、Ⅵ区只有一相电感处于上升趋势,在该区段可将该相确定为起动相。而在Ⅰ、Ⅲ、Ⅴ区各有两相电感处于上升趋势,其中一相电感开始上升,另一相电感趋于饱和上升。在Ⅰ区若确定A相为起动相可能会出现起动转矩过小导致无法起动,若确定C相为起动相可能会由于电感趋于饱和而导致误导通。因此为了解决这一问题,论文在电感分区的基础上设置了低阈值电感TL如图2所示。这样可以避免根据图2中A、B段确定起动相,确保电机正确起动。
1.2 电感值估算方法
由上文分析可知只要能得到三相电感值,就能确定起动相。TFSRM绕组电压方程如式(1)所示:
(1)
式中:Uk为K相电压;ik为K相电流;Rk为K相电阻;Lk为K相电感;ω为角速度。
在静止状态下ω=0,忽略电磁饱和效应和电阻压降,相绕组方程可以简化为式(2):
(2)
将式(2)离散化后得到:
(3)
由式(3)可知,当相电压和注入脉冲电压时间确定时,通过检测相电流即可得到相电感值。
1.3 低阈值电感选取
为了能正确地设定出低阈值电感,需对理想电感曲线及位置角进行分析,图3为TFSRM理想电感曲线。图3中0°为不对齐位置处,11.25°为定、转子齿极中心线对齐处。(0°-θ1)之间磁阻较大电感接近于一个恒定的值;在(θ1-θ2)之间定、转子齿极逐渐重合,电感上升较快。结合本文提出的低阈值电感分区法,论文将θ′处对应的电感值设置为低阈值电感(TL)。通常来说θ′位置不宜过小也不宜过大,否则可能会出现无法起动或误导通现象。θ′计算公式:
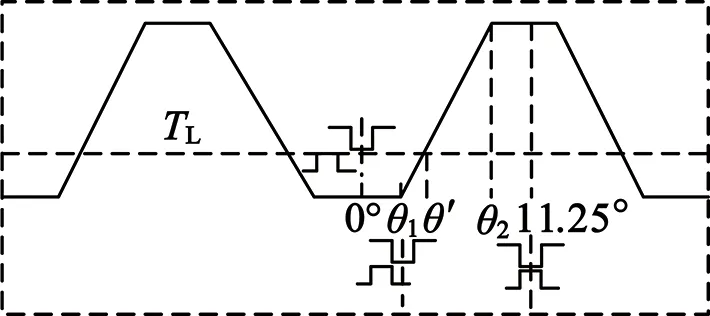
图3 TFSRM理想电感曲线
(4)
1.4 起动相确定
由图2低阈值电感分区图可知,在Ⅱ、Ⅳ、Ⅵ区可直接由电感关系确定起动相。当电感关系为Lc≥La>Lb时确定转子在Ⅱ区,可确定A相为起动相,同样当转子在Ⅳ、Ⅵ区时起动相分别为B、C相。在Ⅰ、Ⅲ、Ⅴ区时结合低阈值电感确定起动相。例如,当得到电感关系为Lc≥Lb>La时确定转子处于Ⅰ区,再将La与低电感阈值比较,当La>TL时确定A为起动相,否则C为起动相。在Ⅲ、Ⅴ区时用同样的方法可以确定具体起动相。表1为起动相逻辑关系。

表1 起动相逻辑
2 运行换相方法
在一般应用场合不需要计算转子每一时刻具体角度信息,只要能检测到换相信息即可实现换相操作。在任意时刻只有一相导通的情况下,论文采用对下一导通相注入脉冲电压的方法实现运行换相。对下一相注入高频脉冲检测信号时,该相磁路不饱和,电流响应较大,通过检测该相电流是否达到设定换相阈值即可实现换相。
例如,当A相为当前导通相时,对下一导通相B相注入高频脉冲电压,同时对B相电流进行检测,当B相电流达到换相阈值时,将A相关断,开通B相,继续对C注入高频脉冲电压,如此循环即可实现电机换相运行。图4为电流斩波控制方式下对B相注入高频脉冲电压及导通后的理想电流波形图。
通过以上方法即可实现电机换相运行,该方法不需要大量计算,也不需要额外硬件电路。另外该算法对A/D转换的精度要求也不高,降低了系统的成本。

(a)CCC方式下B相电流(b)高频脉冲检测
图4 B相电流响应及检测信号波形
3 仿真实验
3.1 TFSRM模型建立
为了验证论文所采用的间接位置检测方法,论文基于MATLAB系统环境对提出的方法进行了验证。首先对三相16极TFSRM本体进行建模。电机一相模型如图5所示,其他两相与该相电磁参数相差120°电角度,图6为系统模型。 仿真参数设定:母线电压为100 V、额定转速为600 r/min、采用电流斩波方式控制、导通相序为A-B-C-A、开通角设置为0°,关断角设置为7.5°。起动时施加高频脉冲电压激励时间为50 μs。

图5 TFSRM一相模型

图6 整体仿真模型
3.2 低阈值电感仿真
在建立的仿真系统中将初始角度设置为θ′=2°,同时将电机速度设置为0以确保得到的电感值为一恒定值。图7为仿真结果,在θ′处电感值为0.7 mH,即对应的低阈值电感TL=0.7 mH。

图7 低阀值电感仿真图
3.3 起动相验证
在仿真系统中分别预设初始角度为5°和10°,可知起动相分别为A相和B相。为了保证仿真结果的准确性,将电机速度设置为0,注入脉冲较短时间内电感值为恒定值。图8、图9分别为5°和10°时三相电感值仿真结果,由电感分区图可以判定转子分别处于Ⅱ区和Ⅲ区,由表一可以确定起动相分别为A相和B相。其结果与预设结果相同,说明该起动相判断方法是可行的。
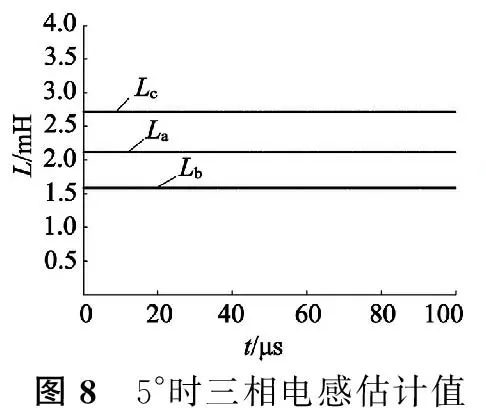
图8 5°时三相电感估计值
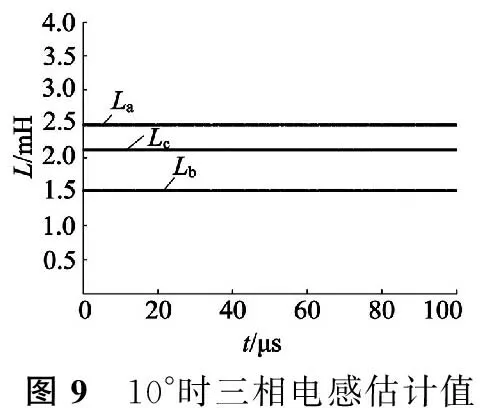
图9 10°时三相电感估计值
3.4 运行换相验证
图10为采用脉冲注入法的B相电流及电压信号波形,图10(a)为电流波形、图10(b)为运行驱动信号,图10(c)为高频脉冲电压检测信号。图11为三相电流波形,图10(a)为A相电流波形、图10(b)为B相电流波形、图10(c)为C相电流波形,可以看到在各相导通前响应电流峰值大小变化明显,适合用于检测换相信号,进行换相操作,从三相电流波形可以看出该方法可以实现电机正确运行换相。仿真结果说明论文采用的无位置传感器位置检测方法是可行的。
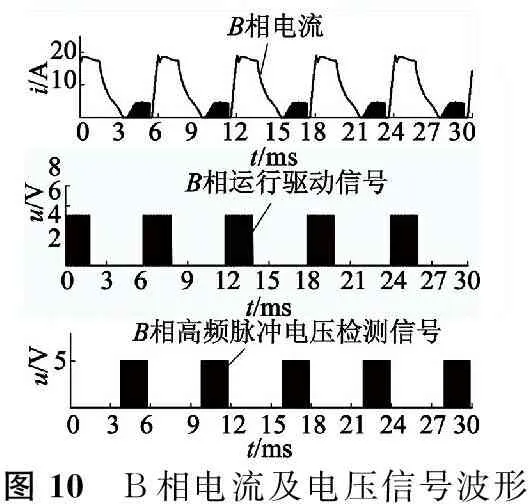
图10 B相电流及电压信号波形

图11 三相电流波形
4 结 语
本文对TFSRM间接位置检测方法进行研究。采用低阀值电感分区结合脉冲注入法实现了电机正常起动及换相运行。并在MATLAB系统环境中进行仿真,验证了该方法的可行性。总结有以下结论:
(1)不需要大量的磁链-电流-角度信息,直接由电感关系结合逻辑表确定起动相,计算量小,算法上易于实现。
(2)不需要在电感接近饱和区时确定起动相,避免了误导通现象。
(3)换相运行时对下一导通相注入高频脉冲,响应电流大便于检测。
[1] 苏士斌,史仪凯,袁小庆,等.横向磁通电机研究综述[J].电子学报,2013,41(11):2290-2296.
[2] 蔡骏,邓智泉.基于全周期电感法的开关磁阻电机无位置传感器控制技术[J].电工技术学报,2013,28(2):145-154.
[3] 张广明,孙心岑,王德明,等.无位置传感器开关磁阻电动机的研究现状和发展趋势[J].微特电机,2013,41(10):73-75.
[4] 沈磊,吴建华,杨仕友.基于自举电路的开关磁阻电机初始位置估计方法[J].中国电机工程学报,2011,31(6):98-102.
[5] TRAKRANCHAROUNGSOOK K,KITTIRATSATCHA S.Position estimation technique of a switched reluctance motor at standstill[C]//Power Conversion Conference.IEEE,2007:238-244.
[6] 蒯松岩,张旭隆,王其虎,等.开关磁阻电机神经网络无位置传感器控制[J].电机与控制学报,2011,15(8):18-22.
[7] 夏长亮,谢细明,史婷娜,等.小波神经网络无位置传感器控制[J].电工技术学报,2008,23(7):33-38.
[8] 张磊,刘闯,王云林,等.开关磁阻电机变双电流阈值的无位置传感器技术[J].中国电机工程学报,2014,34(27):4683-4690.
Indirect Position Estimation Method of Transverse Flux Switched Reluctance Motor
JIANGYa-hai,QUSui-chun,QIUAi-bing,CHENFei
(Nantong University,Nantong 226019,China)
A transverse flux switched reluctance motor indirect position detection method was proposed, and TFSRM starting phase determination and correct phase switching during low speed running were realized.High frequency pulse voltages were injected to each phase at the same time when starting, the inductance value was calculated, and the starting phase was determined by the logical.When running at low speed, high-frequency pulse voltage was injected to the next phase, and detecting the phase current at the same time, when the phase current arrived to the reversing valve, switching phase was executed.This method needs not a lot of calculation with simple algorithm.Finally the TFSRM three-phase system model was established in MATLAB environment.The simulation results show that the method is feasible.
transverse flux switched reluctance motor (TFSRM); indirect position detection; inductance partition; injection pulse voltage
2016-03-31
国家自然科学基金项目(61473159)
TM352
A
1004-7018(2016)09-0061-04
姜亚海(1990-),男,硕士研究生,主要研究方向为新型电机及其控制。