PMSM驱动系统的无模型电流预测控制
2016-12-20李宏韬李红梅
李宏韬,李红梅
(合肥工业大学,合肥 230009)
PMSM驱动系统的无模型电流预测控制
李宏韬,李红梅
(合肥工业大学,合肥 230009)
对于电动汽车PMSM驱动系统而言,复杂多变的负载工况和运行温度使电机参数存在较大的不确定性,直接影响基于模型的PMSM电流预测控制系统性能。论文创新性地将无模型控制和预测控制相结合,基于系统的输入和输出数据建立PMSM超局部模型,再设计PMSM驱动系统的无模型电流预测控制器,架构无模型电流预测控制的PMSM驱动系统。最后,通过系统建模和仿真研究,评价所建议的PMSM驱动系统动静态性能及其对参数变化的鲁棒性并给出结论。
PMSM驱动系统;参数不确定性;超局部模型;电流预测控制;鲁棒性
0 引 言
永磁同步电机(以下简称PMSM)具有效率高、可靠性强、功率密度大和体积小等优点,使其特别适合作为电动汽车的驱动电机,而其驱动控制技术是实现电动汽车电驱动系统高效安全可靠运行的关键技术。对于电动汽车PMSM驱动系统,在要求系统高效运行的同时,也要求其具有快速性、稳态控制精度及抗参数变化的鲁棒性[1],提升电动汽车的动力性、经济性和平顺性。
电流预测控制具有预见性和目的性、高动态响应和易实现的技术优势,在理论上能够实现零电流误差控制,尤其适用于对电流控制器有高动态响应的系统,因此电流预测控制是PMSM驱动系统理想的控制方法之一[2]。但是,因运行温度和不同运行工况的影响,PMSM电枢电阻将会出现高达40%的变化;由于铁磁材料的磁导率随温度变化,磁路饱和程度呈现非线性特性,定子电感也会在较大范围内变化,永磁体磁链可能会出现高达20%的变化,使电机参数存在较大的不确定性[3]。而传统的电流预测控制依赖于系统数学模型,一旦受控电机存在较大的参数不确定性,势必直接影响基于电流预测控制的PMSM驱动系统性能。为此,学者们一直致力于解决该问题并已经提出了各种可供借鉴的改进方法。
文献[4]仅针对变化的PMSM电感参数提出了鲁棒电流预测控制,其实现思路是将定子电流预测公式中的定子实测电流修改为定子预测电流与定子实测电流的加权求和,实现大范围电感参数变化条件下的PMSM驱动系统稳定运行。文献[5]在价值函数设定中引入定子电流控制误差,消除PMSM由于参数不确定性引起的模型误差而产生的定子电流静态误差,但却无法兼顾系统动态性能的提升。文献[6]则是通过化简获得只与电机电感参数相关的定子电流预测公式,再基于模型参考自适应在线辨识出电机电感参数,提升PMSM驱动系统对电感参数变化的鲁棒性。但是,由于公式简化过程中忽略了相邻两个采样周期电机转速、磁链和定子电阻的变化,不可避免地存在控制误差。文献[7-8]采用了自抗扰控制,基于扩张状态观测器的设计补偿PMSM参数不确定性引起的模型误差,然而该方法主要存在所需整定的参数众多且其参数整定多依赖于设计经验的技术不足。文献[9]提出了基于无模型的PMSM电流预测控制,该控制方法只需测量定子电流并计算出它们在相邻周期的差值,具有算法简单和不依赖于电机参数的技术优势,但主要存在对采样频率和电流检测精度均要求过高的不足。
Michel Fliess提出的无模型控制(以下简称MFC)[10]是基于系统的输入和输出数据建立超局部模型,再基于超局部模型进行控制器设计,实现非线性系统的实时高性能控制。
为了提升PMSM驱动系统的动态性能和稳态控制精度,同时兼顾提升系统对电机参数变化的鲁棒性,论文创新性地将无模型控制与电流预测控制相结合,首先建立PMSM超局部模型,再基于PMSM超局部模型设计d,q轴定子电流无模型预测控制器,架构基于d,q轴定子电流无模型预测控制器的PMSM驱动系统,通过系统仿真研究证实所提出的基于无模型PMSM电流预测控制方案的可行性和有效性,并通过与传统的基于模型的PMSM电流预测控制方案的对比研究证实建议方案的技术优势。
1 基于模型的PMSM电流预测控制
1.1 PMSM 数学模型
同步旋转坐标系下的PMSM定子电压方程可表示[11]:
(1)
式中:ud,uq分别表示定子d,q轴电压;id,iq分别表示定子d,q轴电流;Ld,Lq为定子d,q轴电感;R为定子电阻;ψf表示永磁体磁链;ω代表转子电角速度。
1.2 基于模型的PMSM 电流预测控制
使用一阶欧拉法将式(1)离散化,获得基于模型的PMSM电流预测控制表达式:
(2)

基于模型的电流预测控制器如图1所示,其价值函数计算式:
(3)


图1 基于模型的电流预测控制器
基于模型的PMSM电流预测控制系统如图2所示,该系统基于输入的定子d,q轴指令电流和k时刻的实测定子d,q轴电流,根据式(2)计算k+1时刻的定子d,q轴预测电流,再计算价值函数并输出使价值函数取最小值的逆变器开关信号控制逆变器输出,实现PMSM控制。

图2 基于模型的PMSM电流预测控制系统
2 PMSM驱动系统的无模型电流预测控制
基于PMSM驱动系统输入和输出数据,建立PMSM超局部模型,其表达式:
(4)
式中:αd,αq分别表示PMSM定子d,q轴电压系数;Fd,Fq包含了系统已知部分、未建模动态和参数不确定性等未知部分。
将(4)式离散化,可获得无模型电流预测控制的PMSM定子预测电流表达式:
(5)
(6)

3 系统建模与仿真
建议的无模型电流预测控制PMSM驱动系统如图3所示,其中无模型电流预测控制器如图4所示。为了验证建议的PMSM驱动系统控制方案的有效性,将其与基于模型的PMSM电流预测控制系统进行性能对比研究。受控PMSM标称参数如表1所示,无模型预测控制器参数为αd=αq=650。
为了表征PMSM存在的参数不确定性,与标称参数相比,将永磁体基波磁链设置减小20%,定子电感减小30%,定子电阻减小20%,则有ψf=0.021 6Wb,L=0.7mH,R=0.076 6Ω。PMSM驱动系统
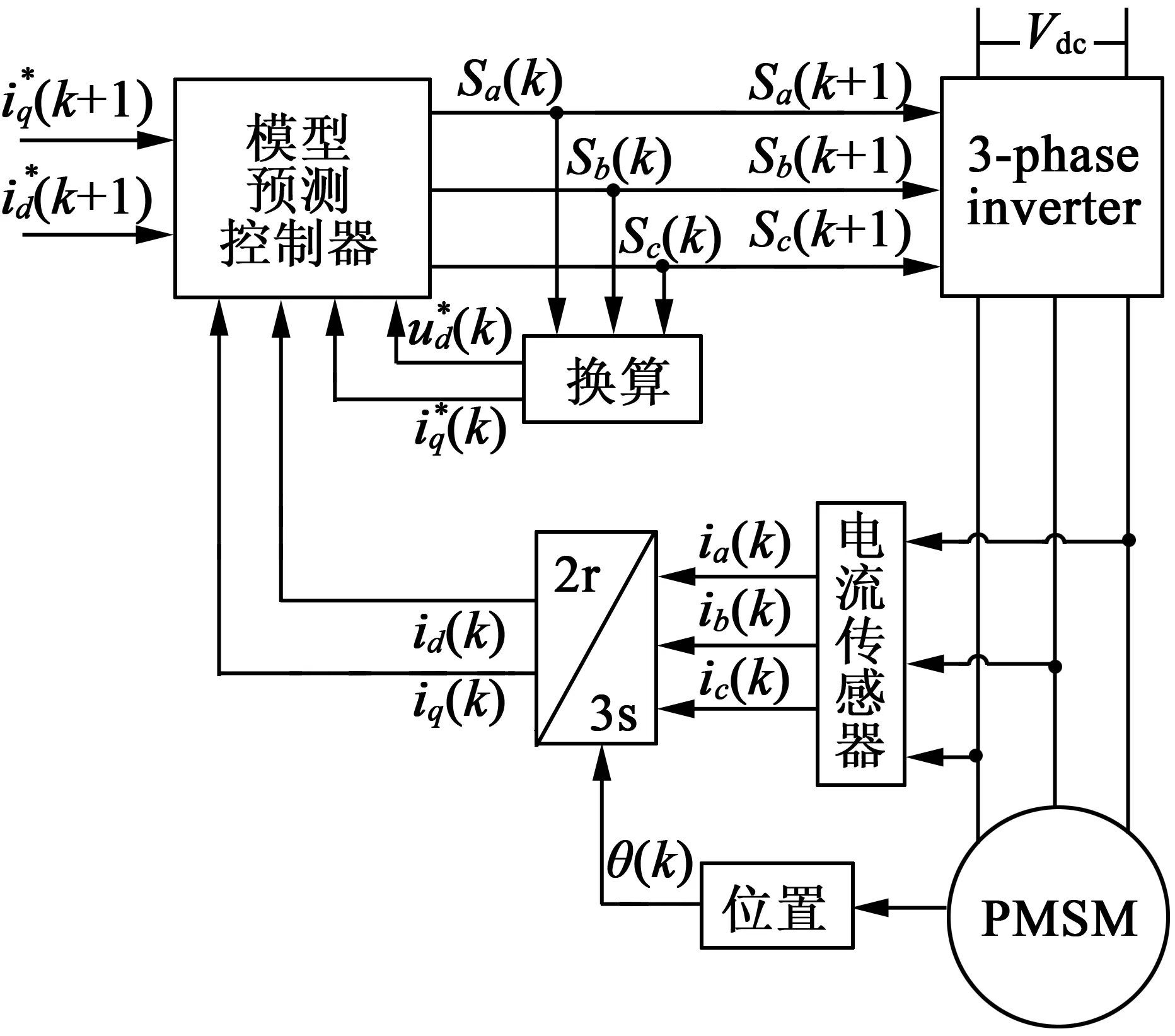
图3 无模型电流预测控制PMSM驱动系统

图4 无模型电流预测控制器

参数数值参数数值额定转矩Tn/(N·m)13q轴电感Lq/H1极对数12永磁体磁链ψpm/Wb0.027定子电阻Rr/Ω0.0957直流侧电压Udc/V48d轴电感Ld/H1额定电流In/A19

(a)标称参数下定子d,q轴电流动态(b)参数变化时的定子d,q轴电流动态
图5 无模型电流预测控制PMSM驱动系统的定子电流动态

(a)标称参数时下定子d,q轴电流动态(b)参数变化时的定子d,q轴电流动态
图6 基于模型的电流预测控制PMSM驱动系统的定子电流动态
4 结 语
鉴于电动汽车PMSM驱动系统运行在复杂多变的运行工况下,其PMSM存在的参数不确定性直接影响PMSM驱动系统的控制性能。为此,论文创新性地将无模型控制与电流预测控制相结合,建立PMSM系统超局部模型,再基于PMSM超局部模型设计d,q轴定子电流无模型预测控制器,且架构了基于d,q轴定子电流无模型预测控制器的PMSM驱动系统。通过系统建模和仿真研究证实了建议的PMSM驱动系统具有不依赖于PMSM参数且兼具动态性能好和稳态控制精度高的技术优势,可望直接推广应用于电动汽车PMSM驱动系统实现其实时高性能控制。
[1] RAMAKRISHNAN R,ISLAM R,ISLAM M,et al.Real time estimation of parameters for controlling and monitoring permanent magnet synchronous motors[C]//IEEE International Electric Machines and Drives Conference.IEEE,2009:1194-1199.
[2] 洪俊杰,陈思哲,郭壮志,等.基于电流预测控制的电动汽车用 PMSM 控制器设计[J].微特电机,2015,43(8):99-102.
[3] RAMAKRISHNAN R,ISLAM R,ISLAM M,et al.Real time estimation of parameters for controlling and monitoring permanent magnet synchronous motors[C]//IEEE International Electric Machines and Drives Conference.IEEE,2009:1194-1199.
[4] 牛里,杨明,刘可述,等.永磁同步电机电流预测控制算法[J]. 中国电机工程学报, 2012,32(6):131-137.
[5] MATSUTANI S,ZANMA T,SUMIYOSHI Y,et al.Optimal control of PMSMs using model predictive control with integrator[C]//ICCAS-SICE.IEEE,2009: 4847-4852.
[6] WANG Weihua,XIAO Xi.Adaptive incremental predictive control method for current of PMSM based on online identification of inductance[J].Electric Machines & Control,2014,18(2):75-82.
[7] WU Xuan,WANG Hui,HUANG Sheng,et al.Research on the recursive model predictive control algorithm of PMSM[C]//Transportation Electrification Asia-Pacific (ITEC Asia-Pacific),2014 IEEE Conference and Expo.IEEE,2014:1-6.
[8] LI Qiong,QIANG Xu,WU Ren.An improved predictive current method for permanent magnet synchronous motors[C]//Transportation Electrification Asia-Pacific (ITEC Asia-Pacific),2014 IEEE Conference and Expo.IEEE,2014:1-6.
[9] LIN C K,LIU T H,YU J T,et al.Model-free predictive current control for interior permanent-magnet synchronous motor drives based on current difference detection technique[J].IEEE Transactions on Industrial Electronics,2014,61(2):667-681.
[10] FLIESS M,JOIN C.Model-free control[J].International Journal of Control,2013,86(12):2228-2252.
[11] 王伟华,肖曦,丁有爽.永磁同步电机改进电流预测控制[J].电工技术学报,2013,28(3):50-55.
Model-Free Current Predictive Control of PMSM Drive System
LI Hong-tao, LI Hong-mei
(Hefei University of Technology,Hefei 230009,China)
For PMSM drive system in electrical vehicles (EVs), complex and changeable load conditions and operating temperature lead to the existence of large PMSM parameter uncertainty, which will directly affect the performance of conventional model-based current predictive controlled PMSM drive system. Therefore, a novel control method combining the model-free control and predictive control is proposed in this paper, the ultra-local model is firstly set up by only using the input and output data of PMSM drive system, then, a model-free current predictive controller is designed, and then, the model-free current predictive controlled PMSM drive system is architected. Finally, via the system modeling and numerical simulation, the dynamic and static performance and robustness against parameter variations for proposed PMSM drive system are tested and analyzed and the some conclusions are shown.
PMSM drive system; parameter uncertainty; ultra-local model; current predictive control; robustness
2016-01-19
国家自然科学基金项目(51377041)
TM351;TM341
A
1004-7018(2016)10-0050-04
李宏韬(1992-),男,硕士研究生,研究方向为电机控制。