针对GPS接收机自适应天线调零抗干扰的对抗方法研究*
2016-12-20吴德伟
毛 虎,吴德伟,卢 虎
(空军工程大学信息与导航学院,西安 710077)
针对GPS接收机自适应天线调零抗干扰的对抗方法研究*
毛 虎,吴德伟,卢 虎
(空军工程大学信息与导航学院,西安 710077)
自适应天线调零是GPS接收机最主要的抗干扰措施之一。为了迫使自适应调零“失效”,在分析GPS接收机采取功率倒置(power inverse,PI)算法进行自适应调零适用性的基础上,针对PI算法在实现时所需的先验信息相对较少、收敛速度相对较慢以及在低干噪比(jamming-to-noise ratio,JNR)下产生零陷角域相对较宽的特点,提出了强干扰“掩护”下的弱干扰进入、强干扰同步开关下的弱干扰间隙“填充”以及干扰俯仰方向逼近等对抗方法。通过仿真分析验证了对抗方法的可行性和有效性。
自适应调零;PI算法;协同干扰;开关干扰;逼近干扰
0 引言
导航对抗对于能否夺取现代战争中的制信息权起着重要作用。针对GPS下行链路易受干扰的弱点,美军作战武器上安装的GPS接收机普遍具有自适应天线调零抗干扰措施[1],提升GPS接收机自适应天线调零抗干扰的有效性成为研究热点[2-5],而针对其的对抗方法较少探讨。文献[6]根据空域滤波理论上最多产生的零陷数为阵元数减1,简要的提及可采取空中布撒多干扰源的策略来对抗自适应天线调零,未能进一步研究具体实施过程,另外,对于空时联合滤波的自适应调零,仅仅利用干扰源数量优势会受到极大限制。文献[7]提出在增加干扰源数量的同时,可进一步采用升空逼近的方法来对抗自适应天线调零,但未能进行定量的仿真验证。文献[8]借鉴雷达对抗中的交叉眼干扰,利用不同空间位置的干扰源交替发射干扰信号来产生快变的非平稳环境,从而延缓自适应调零滤波器的收敛过程,但一方面交替发射的时机和频率难以协调控制,另一方面滤波器最终仍是会维持于收敛状态。文献[9]根据仿真实验结果得出:可通过增加分布式干扰源数量、运动速度以及在确定卫星信号方位参数后集中投放干扰源等途径来抑制自适应天线调零的抗干扰效果,但未能依据所采取的自适应滤波算法在实现时的具体特性来设置干扰模拟条件和场景,因此,所得结论的实际指导意义有限。
文中在讨论GPS接收机适合采用PI算法进行自适应调零的基础上,通过分析PI算法在工作条件、收敛速度和实现复杂度等方面的特性,提出强弱协同、同步开关和来向逼近等方法对其进行对抗,仿真分析结果验证了对抗方法的可行性和有效性,为后续的压制/欺骗双模干扰效果提供了保证。
1 GPS接收机自适应天线调零抗干扰的实现
自适应天线调零采用某种自适应算法按照特定的优化准则调整各天线阵元的权向量,以用来跟踪期望或干扰信号的变化。在单纯的空域滤波中,各种不同优化准则的最优权值都收敛于维纳解[4];而在空时联合滤波中,对于窄带信号,各准则间的等价关系也是成立的,对于宽带信号,各准则下的稳态信干噪比(SINR)仅相差不超过十几分之一分贝,也可认为是基本等价的[4]。因此,采用的自适应算法成为决定自适应天线调零抗干扰性能的关键。
1.1 PI算法的适用性分析
在实际的工程应用中,具有代表性的自适应算法包括[10]:最小均方(LMS)算法、递归最小二乘(RLS)算法、直接/采样矩阵求逆(DMI/SMI)算法、HA(Howells-Applebaum)算法等。其中:LMS算法容易实现,运算量小,但收敛速度较慢;RLS算法的突出优点是收敛速度快,而且算法性能对阵列信号协方差矩阵的病态程度敏感性不强,但结构复杂,需要的计算量较大;DMI/SMI算法克服了输入信号自相关矩阵特征值分散时对权矢量收敛速度的影响,其最快收敛速度与特征值散布无关,但同样也存有计算量大的问题,而且有时会出现数值计算的不稳定;HA算法则需要对信号的准确来向已知。
LMS、RLS和DMI/SMI算法都属于基于参考信号的自适应算法,对于GPS接收机,其在同一时刻会接收到多颗卫星导航信号,接收卫星信号的数目和具体形式都是不确定的,因此,要产生稳定的参考信号比较困难;HA算法需要已知信号准确来向,由于载体移动造成接收机相对卫星位置在不断变化,而且干扰来向也无法实时预知,因此,HA算法也不适合应用于GPS接收机的自适应天线调零中。
GPS信号到达地球表面时的功率极其微弱,完全被接收机内部噪声所淹没,在无干扰或干扰较小的情况下,接收机能够利用扩频增益从噪声中对有用信号进行提取,从而完成导航定位功能,而当干噪比(JNR)过大时,接收机就无法正常工作。对于这种强干扰环境下的弱信号接收,采用PI算法进行自适应天线调零是比较适合的选择。PI算法是建立在单线性约束最小方差(LCMV)准则之上的自适应算法[11],其通过自适应调整阵元权值而使加权后的阵列输出功率达到最小,常用的约束条件是确保天线阵元对期望信号的增益为常数,权向量的递推更新是依据最陡梯度下降法而得到。信号功率越强,PI算法形成的零陷深度越大,因此,会在强干扰方向上形成较深的零陷,而在弱GPS信号方向上无法形成有效零陷,从而达到抑制干扰,提高输出SINR的目的。
1.2 PI算法的特性分析
自适应算法的性能可从跟踪性能、收敛速度以及稳健性三个方面来衡量。基于参考信号和基于波达方向(DOA)估计的自适应调零算法的基本特性如表1所示。
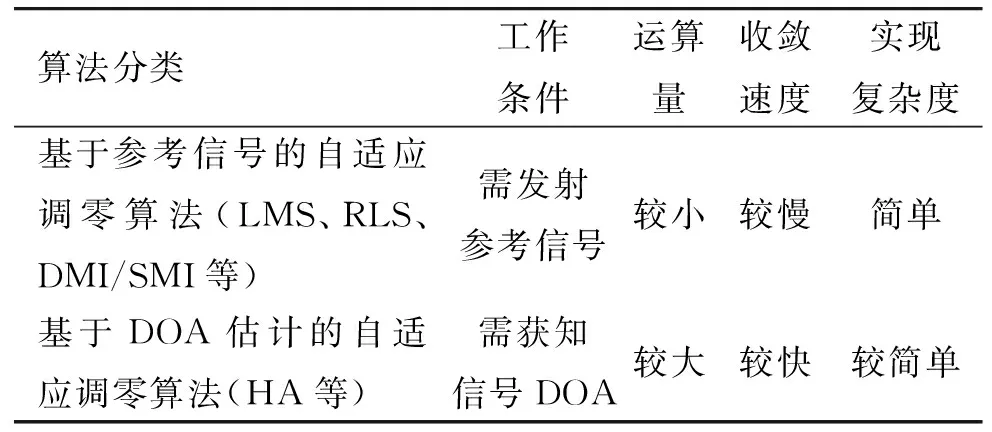
表1 两类自适应天线调零算法的基本特性
PI算法适合被GPS接收机采用进行自适应调零的重要原因就是可降低实现自适应调零时的工作条件,即所需要的先验信息相对较少,但这同时也减弱了在信道环境发生变化时算法自适应跟踪信道的能力;PI算法在本质上属于基于DOA估计的自适应调零算法,但其阵元权值的更新过程又可看作是LMS算法的变形,因而与一般的基于DOA估计的自适应调零算法相比,尽管运算量减小,但收敛速度减慢,仅略快于LMS算法;PI算法实现复杂度简单,只需强干扰、弱信号即可,但在JNR较小的情况下,PI算法的稳健性较差,即产生零陷的角域相对较宽。
2 PI自适应调零算法对抗方法
以典型的7阵元均匀圆阵作为GPS接收机自适应调零的天线布阵形式,阵元间距取半个波长,对不同干扰条件下的PI算法性能进行仿真分析,从而提出针对其的对抗方法。
2.1 强弱协同对抗
利用PI算法在信道变化环境中自适应跟踪性能下降的特性,可以考虑强、弱干扰协同对抗。设干扰数量为5,干扰来向的俯仰角向量为[30°,30°,30°,30°,30°],方位角向量为[60°,120°,180°,240°,300°],GPS卫星信号已完全被接收机内部噪声所淹没,数据采样点数量为6 000,JNR取40 dB,权值初始化向量设置为[1,0,0,0,0,0,0],步长因子取0.02,PI算法下7阵元均匀圆阵阵列输出俯视方向图如图1所示。
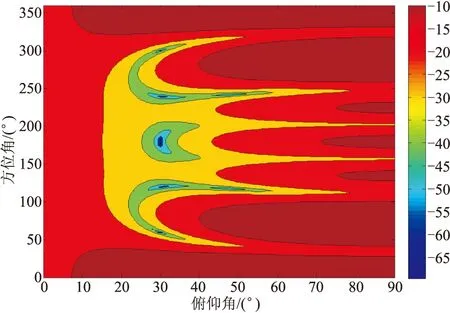
图1 PI算法下7阵元均匀圆阵阵列输出俯视方向图
由图1可以看出,在5个功率相同的不同方位来向干扰下,7阵元均匀圆阵阵列输出能够在干扰方向上形成准确零陷。此时将第5个干扰来向设置为[60°,300°],功率设置为高出其它干扰10 dB,其它仿真条件同图1,则PI算法下7阵元均匀圆阵阵列输出俯视方向图如图2所示。
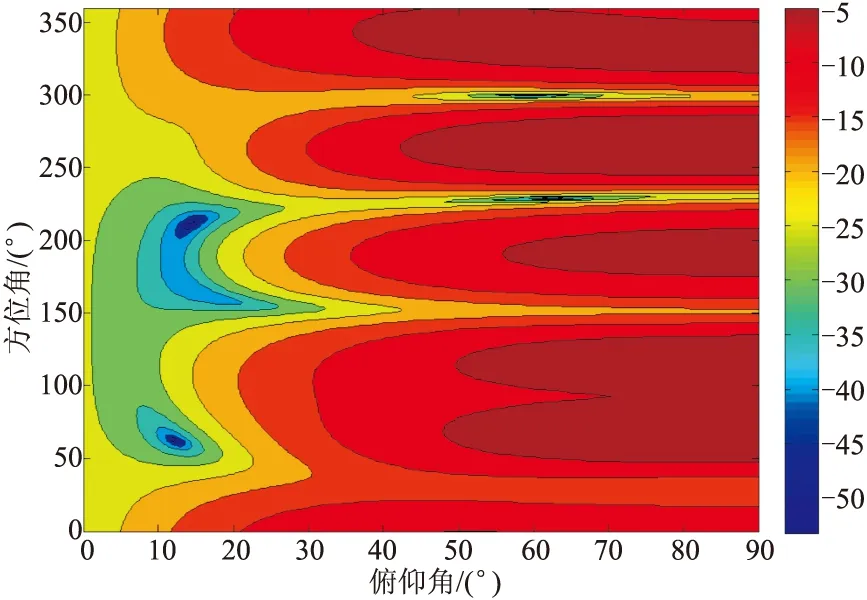
图2 PI算法下7阵元均匀圆阵阵列输出俯视方向图
将图2仿真参数中的第5个干扰来向变为[80°,300°],其它仿真条件不变,则PI算法下7阵元均匀圆阵阵列输出俯视方向图如图3所示。
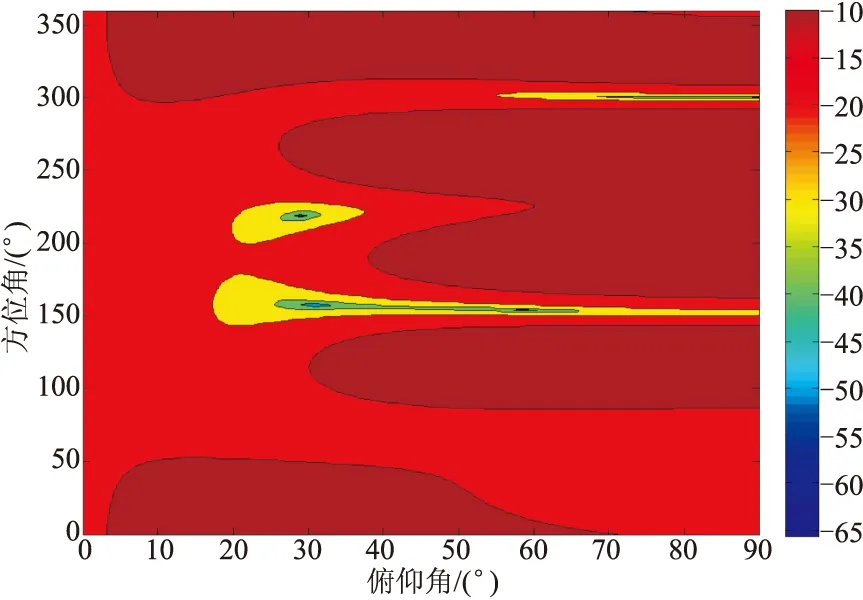
图3 PI算法下7阵元均匀圆阵阵列输出俯视方向图
将图2仿真参数中的第5个干扰的功率设置为高出其它干扰20 dB,其它仿真条件不变,则PI算法下7阵元均匀圆阵阵列输出俯视方向图如图4所示。

图4 PI算法下7阵元均匀圆阵阵列输出俯视方向图
由图2可以看出,在与其它弱干扰来向成一定夹角的强干扰“掩护”下,采用PI算法的7阵元均匀圆阵只会在强干扰方向上形成较深零陷,而对于其它弱干扰来向造成的衰减大大减小,这证明了对PI算法跟踪性能的理论分析结论。由于PI算法在判别干扰时可利用的信息较少,若在某方向上出现有强干扰时,PI算法会将与强干扰来向有一定夹角的弱干扰视为“噪声”进行处理。弱干扰是相对于强干扰而言的,根据图2的仿真参数,即使在经过接收天线阵列衰减后仍要比接收机的内部噪声高出20 dB以上,3、4个这样的弱干扰即可对采用PI算法进行自适应调零的GPS接收机造成严重影响。另外,由图3、图4可以发现,增大强、弱干扰之间的来向夹角和功率比值,更有利于应用强干扰的“掩护”来协同弱干扰进行对抗(对于空时联合滤波,将强、弱干扰发射信号样式调制为宽带信号即可)。
2.2 同步开关对抗
利用PI算法阵元权值收敛速度相对较慢的特性(对于空时联合滤波,权值更新需要的时间会更长),可以考虑多干扰源的开关对抗。开关可分为交叉开关和同步开关:交叉开关会迫使自适应调零的零陷点交替的向不同空间角收敛,但这种零陷点的摆动,只会造成滤波器收敛速度减慢,即滤波器最终还是会处于收敛状态[8],另外,交叉开关每次都只有一个干扰发射,作用于接收机的干扰强度不够,若用大功率的常规连续干扰发射加以配合,则形成的强、弱干扰环境又很容易被PI算法进行自适应调零,因此,交叉开关并不是理想的对抗选择;同步开关与交叉开关的不同之处在于,可以利用干扰的有无使滤波器一直处于一种“半”收敛状态,但开关的同步通断会造成干扰有效平均功率下降,因此,可用弱干扰(相对于强干扰而言)加以配合,这时自适应调零对强、弱干扰的衰减都较小,即用强干扰的同步开关来“破坏”滤波器的收敛状态,而用弱干扰对强干扰的干扰间隙进行“填充”也是一种有效的PI算法自适应调零对抗方法。
设干扰数量为3,用干扰来向分别为[30°,60°]和[70°,180°]的强干扰(JNR=40 dB)进行同步开关干扰(通过0、1来控制接收干扰采样数据的有无,根据在常规连续干扰下PI算法自适应调零大约在300数据点以后趋于收敛,因此将6 000采样数据点分成20个重复周期,每个周期的占空比设为0.7),用于辅助的弱干扰来向为[50°,120°],其功率比强干扰低10 dB,PI算法下7阵元均匀圆阵阵元(2~7阵元)权值迭代曲线和阵列输出俯视方向图如图5、图6所示。
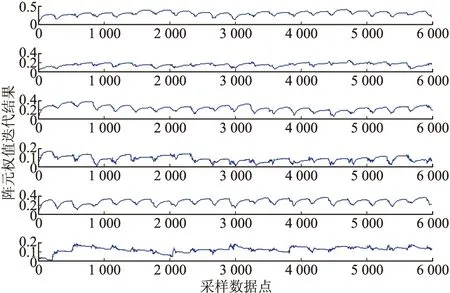
图5 PI算法在同步开关干扰情形下的7阵元均匀圆阵阵元权值迭代变化曲线

图6 PI算法在同步开关干扰情形下的7阵元均匀圆阵阵列输出俯视方向图
由图5、图6可以看出,与常规连续干扰相比,在加入强同步开关干扰后,权值迭代的波动性明显增加,已不能分辨出权值随采样数据点数的收敛过程,自适应调零在各个干扰方向都无法形成有效的零陷,对干扰的衰减大大减小(不超过-10 dB)。另外,在保证同步开关干扰重复周期小于等于阵元权值完全收敛时的采样数据点情况下,通过对不同开关占空比下的阵列输出方向图进行仿真比较,发现开关占空比大小对干扰效果的影响是不敏感的,考虑到干扰通断因素,可将开关占空比设置在0.5~0.8之间;通过对不同JNR下的阵列输出方向图进行仿真比较,发现此时PI算法对功率越大的干扰零陷程度越深的固有特征无法体现,因此,可尽可能采用大功率的强干扰来实施同步开关,以提高对GPS接收机的干扰有效平均功率。对于同步开关的实现可利用公用电话网中的时间信号或者利用军用局部授时系统。
2.3 干扰来向逼近对抗
利用PI算法在JNR较小时产生零陷角域较宽的特性,若干扰与期望信号的来向夹角保持在一定范围内,则空域或空时联合滤波在对干扰形成零陷的同时,也会造成该方向附近的GPS信号衰减严重,甚至不能满足接收机正常的捕获跟踪工作要求。设干扰来向为[30°,120°],JNR取25 dB,DMI算法和PI算法下7阵元均匀圆阵阵列输出方向图如图7所示。
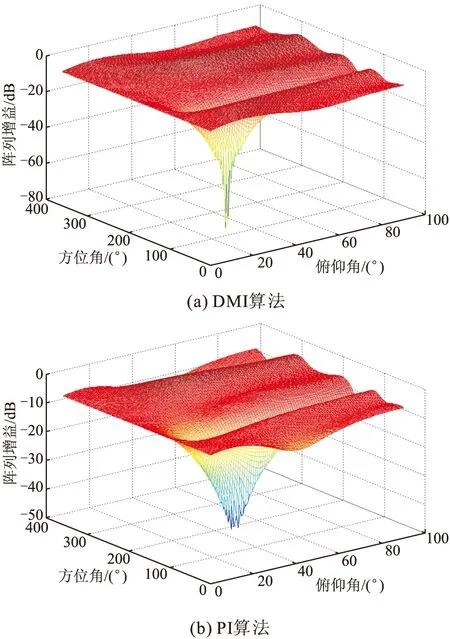
图7 DMI算法和PI算法在单干扰下7阵元均匀圆阵阵列输出方向图
由图7可以明显看出,PI算法在低JNR下的零陷角域范围确实较宽,这就为利用升空干扰平台(干扰发射功率有限)来进行针对GPS接收机自适应调零的方向逼近对抗提供了可能性。将干扰来向分别变为[50°,120°]和[70°,120°],PI算法下7阵元均匀圆阵阵列输出俯视方向图如图8所示。
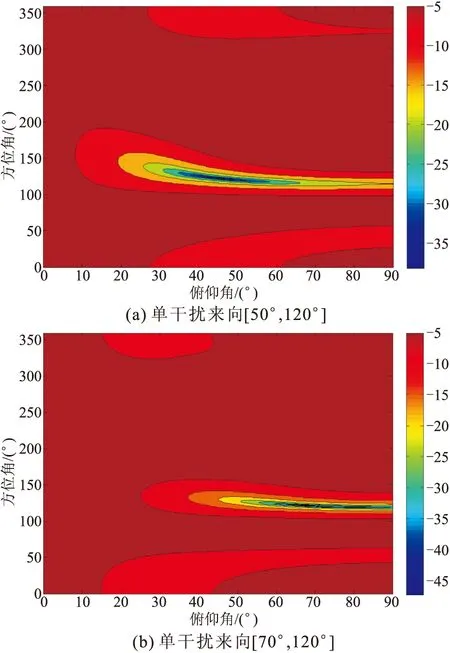
图8 不同单干扰来向时PI算法下7阵元均匀圆阵阵列输出俯视方向图
由图8可以看出,若卫星与干扰信号的入射俯仰夹角在20°范围内,PI算法产生的零陷对卫星信号的衰减也很大,造成接收机无法对卫星信号可靠利用。通过进一步大量仿真发现,对于任意方位角干扰来向,PI算法下(JNR=25 dB)俯仰夹角为20°的零陷角域范围几乎不变。由于接收机在某一空域下的可见卫星平均数为8,因此,可在地面雷情网对干扰目标航迹的引导下,调整8个侦测站的天线分别接收干扰目标位置空域仰角范围在30°~150°的选定卫星信号,经自动跟踪系统处理后传送至升空干扰平台,通过对干扰目标的逼近,尽可能使得干扰与卫星信号的最小入射夹角保持在小于20°的范围内,考虑到干扰目标与升空干扰平台之间存有相对运动,即干扰来向是在不断发生变化,这种类似于缓变的交叉干扰会延长PI算法的收敛时间,因此,采用升空平台逼近干扰来大幅降低自适应调零获取的抗干扰增益,扰乱卫星信号的正常接收还是比较可行的,当接收机能够利用的卫星信号数量小于4时,就无法继续完成导航定位功能。
3 结束语
提出采用强干扰“掩护”下的弱干扰进入、强干扰同步开关下的弱干扰间隙“填充”以及干扰俯仰方向逼近等方法对PI算法下的GPS接收机自适应调零进行对抗。在来向有一定夹角的强、弱连续干扰协同下,PI算法对弱干扰的衰减程度减小明显,少量这样的弱干扰即可对GPS接收机造成严重影响,而且增大强、弱干扰之间的来向夹角和功率比值,更有利于强干扰“掩护”协同弱干扰的自适应调零对抗;在保证同步开关干扰重复周期小于等于阵元权值完全收敛时的采样数据点时,PI算法对功率越大的干扰零陷程度越深的固有特征无法体现,且开关占空比对干扰效果的影响不敏感,因此,可尽可能采用大功率的强干扰来实施同步开关,开关占空比可设置在0.5~0.8之间,以提高对接收机的干扰有效平均功率;PI算法在低JNR下的调零角域较宽,若卫星与干扰信号的入射俯仰夹角在20°范围内,则很有可能造成接收机能够利用的卫星信号数量小于4,从而无法完成定位导航。
[1] 王新怀. 卫星导航抗干扰接收系统技术研究 [D]. 西安: 西安电子科技大学, 2010.
[2] 董斌, 杨华, 赵璐, 等. 自适应调零抗干扰卫星导航系统零陷特性分析 [J]. 遥测遥控, 2011, 32(6): 48-51.
[3] MYRICK W, GOLDSTEIN J S, ZOLTOWSKI M. Low complexity anti-jam space-time processing for GPS [C]∥ Proceedings of IEEE International Conference on Acoustics, Speech, and Signal Processing, Salt Lake City, 2001: 2233-2236.
[4] 郭艺, 张尔扬, 沈荣骏. GPS接收机联合空时抗干扰简化方法 [J]. 信号处理, 2007, 23(5): 662-665.
[5] 叶建杰. 基于自适应调零天线的GPS抗干扰技术研究 [D]. 西安: 西安电子科技大学, 2013.
[6] 侯者非, 王学东, 陈国军. GPS干扰与抗干扰技术研究 [J]. 现代电子技术, 2004(23): 99-101.
[7] 王永州, 夏斌, 马辉. 基于圆形天线阵的GPS抗干扰性能仿真与其干扰方法研究 [J]. 通信技术, 2014, 47(1): 76-79.
[8] 董红飞. GPS接收机空时联合自适应干扰抑制及对抗研究 [D]. 长沙: 国防科学技术大学, 2005.
[9] 刘宝, 王振宇, 丁刚. GPS/INS制导系统中自适应天线阵列的干扰研究 [J]. 航天电子对抗, 2007, 23(3): 43-46.
[10] 赵晓东, 马煦, 瞿稳科. 功率倒置算法在GPS接收机天线抗干扰中的应用 [J]. 电讯技术, 2009, 49(7): 45-48.
[11] MENG D, FENG Z, LU M. Anti-jamming with adaptive arrays utilizing power inversion algorithm [J]. Tsinghua Science & Technology, 2008, 13(6): 796-799.
Research on Countermeasure Scheme to Anti-jamming of Adaptive Nulling of GPS Receiver
MAO Hu,WU Dewei,LU Hu
(Information and Navigation College, Air Force Engineering University, Xi’an 710077, China)
Adaptive nulling technology is one of main anti-jamming measures adopted by GPS receiver. In order to force adaptive nulling invalidation, on the basis of analysis of PI algorithm applicability for adaptive nulling of GPS receiver, in view of the characteristics of PI algorithm including less prior information required, slower convergence rate and wider nulling angular region at low JNR, countermeasure scheme proposed is that weak jamming entrance covered by strong jamming, weak jamming clearance filled under strong jamming synchronous on-off and jamming pitch direction approximation. Simulation results validate feasibility and effectiveness of the proposed countermeasure scheme.
adaptive nulling; PI algorithm; cooperative jamming; on-off jamming; direction approximation jamming
2015-01-31
国家自然科学基金(61174194)资助
毛虎(1987-),男,陕西咸阳人,博士研究生,研究方向:导航战与导航对抗。
TN967.1;TN972
A
