双捷联冗余技术在长征二号丁运载火箭上的研发与实践
2016-12-20谈学军李建强姚瑞芳
谈学军,洪 刚,李建强,姚瑞芳
(1.上海航天技术研究院,上海 201109; 2.上海宇航系统工程研究所,上海 201109)
双捷联冗余技术在长征二号丁运载火箭上的研发与实践
谈学军1,洪 刚2,李建强2,姚瑞芳2
(1.上海航天技术研究院,上海 201109; 2.上海宇航系统工程研究所,上海 201109)
介绍了双捷联冗余技术在长征二号丁(CZ-2D)运载火箭上的研发与实践。阐述了采用双八表惯组和光纤惯组的必要性,以及激光/光纤双捷联惯组的优势。给出了基于采用主从冗余设计的激光/光纤双捷联控制系统的组成,以及突破的故障诊断与决策、全方位发射、组合导航、方位瞄准及参数测量、三CPU冗余计算机等关键技术。飞行试验验证了双捷联冗余技术总体设计的正确性。展望了运载火箭惯导技术中二度故障重构率提高、组合导航改进、双捷联主备份互换、大角度空中滚转定向、十表惯组应用等的后续发展。双捷联冗余控制系统的应用,提高了全箭飞行可靠性和任务适应性,以及入轨精度,减轻了火箭末子级的质量,增大了运载火箭的运载能力,为光纤惯组在运载火箭中的应用积累了成功子样。
运载火箭; 激光陀螺; 光纤陀螺; 冗余; 双八表; 故障诊断与决策; 组合导航; 全方位发射; 方位瞄准
0 引言
框架式平台采用传统的机械式陀螺仪,结构复杂、工艺实施要求高,产品整体可靠性较低。随着惯性器件技术的发展和计算机技术的日益成熟,从运载火箭的飞行可靠性、全箭研制成本等角度出发,惯性测量系统由框架式平台向捷联式惯组过渡是必然的趋势。在宇航领域,目前捷联式惯组应用较多的是基于激光陀螺仪和光纤陀螺仪的两种产品,激光陀螺开发较早且满足使用要求,因此在国外航天领域中已广泛应用,如阿里安Ⅳ运载火箭采用了法国塞克斯公司的Quasar环形激光陀螺捷联惯性系统;日本H-Ⅱ运载火箭采用激光陀螺捷联惯性测量系统;俄罗斯礼炮7号宇宙飞船姿控系统采用了六轴激光陀螺装置;国内现役CZ-3A系列、CZ-2C运载火箭也已采用双七表激光陀螺惯组。
2010年,采用平台/激光捷联主从冗余技术的CZ-2D Y14运载火箭完成飞行试验并取得圆满成功。至此,CZ-2D型号在系统故障诊断及决策、速率陀螺冗余、捷联的工程应用及冗余箭机等方面,已积累了经验并为双捷联系统的研制打下了良好的基础。为提高飞行可靠性和卫星入轨精度,同时规避同类型惯组作热备份时的共模故障,对CZ-2D运载火箭控制系统采用激光/光纤双捷联惯组冗余方案的必要性进行了论证,引入GNSS接收机的测量信息进行卡尔曼滤波组合导航,并开展研制。本文主要阐述CZ-2D运载火箭采用激光/光纤双八表惯组的必要性、双捷联控制系统的组成、故障诊断与决策、全量动力学模型和稳定解耦控制、组合导航及三CPU冗余计算机,并给出了飞行试验的验证结果。
1 采用激光/光纤双八表惯组的必要性
1.1 采用双八表的必要性
目前国内现役运载火箭中,CZ-2D、CZ-4B/C运载火箭的平台+捷联状态采用了六表激光惯组,CZ-3A系列、CZ-2C运载火箭采用双七表激光惯组冗余控制系统;新一代运载火箭中,CZ-5运载火箭采用了双套六表激光惯组和1套六表光纤惯组的方案。由于双六表或双七表缺乏更多的故障判别子样,陀螺的故障诊断常需引入速率陀螺信息,而速率陀螺安装位置及对箭体动态特性响应的差异,导致姿态故障判别门限的设计相对偏大;双六表的加速度信息诊断,由于只有2个子样,只能采取极值和常零判别模式,门限设计偏差大,若出现门限临界的情况,则会导致入轨精度超差。
双八表惯组陀螺和加表均采用“三正一斜”方案,通过增加表头冗余改进故障诊断模式,即利用斜装的陀螺、加表信息实现对正装表的自检,无需再引入外部信息,简化了控制系统的设计。
1.2 引入光纤惯组的必要性
光纤陀螺是基于Sagnac效应的光学陀螺。Sagnac效应的机理是:在一个任意几何形状的闭合光学环路中,从任一点出发,沿相反方向传播的两束光波绕行一周返回到该点时,如闭合回路相对惯性空间沿某方向转动,则两束光波的相位将发生变化[1]。Sagnac相移与闭合光路面积或光纤线圈长度直径乘积成正比,与闭合光路形状、旋转轴位置无关。
光纤陀螺具无运动部件、工艺简单、动态范围大、抗冲击、耐过载等特点,且有高稳定性和抗干扰性[2-4]。与同样基于Sagnac效应的激光陀螺相比,无需数千伏的点火电压,无克服自锁作用的机械抖动装置,功耗低、成本低、可靠性高,理论检测精度高于激光陀螺仪。国外已在多个宇航型号上应用,如美国的克莱门汀月球探测器、机遇号和勇气号火星探测器等,日本在TR-IA运载火箭的姿态控制系统及M-V运载火箭的惯性导航系统中都将光纤惯组作为惯性测量装置。目前,国内光纤惯组的研制处于工程应用阶段,因导弹对惯组的指标要求相对较低而得以普遍成熟应用,但在宇航领域光纤惯组的应用尚处于推广阶段。光纤与激光惯组的性能见表1。由表1可知:国内光纤惯组的精度与激光惯组基本相当,其零位偏置稳定性稍具优势。
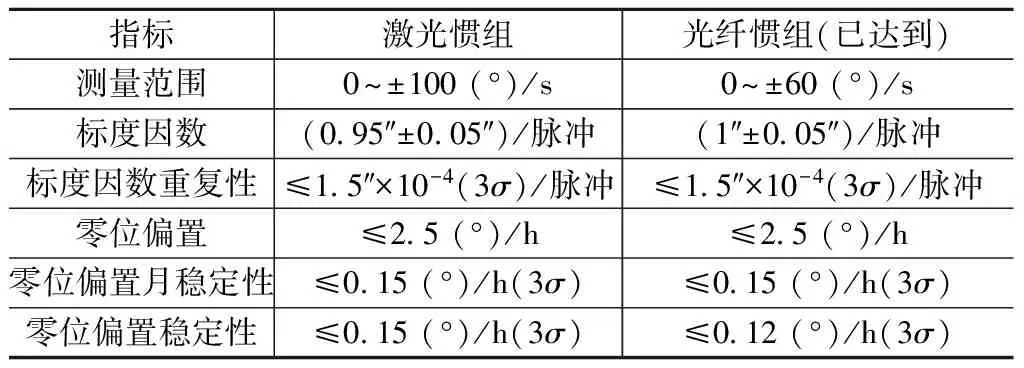
表1 光纤与激光惯组性能指标
1.3 采用双捷联的优势
不同控制系统特点见表2。表中:N,I,M,M0为单平台控制系统为基准值。由表2可知:与单平台、平台/捷联冗余状态相比,双捷联冗余控制系统的可靠性,Ⅰ、Ⅱ类单点数量及成本的优势相对明显,功耗、对运载能力贡献与单平台状态相当。
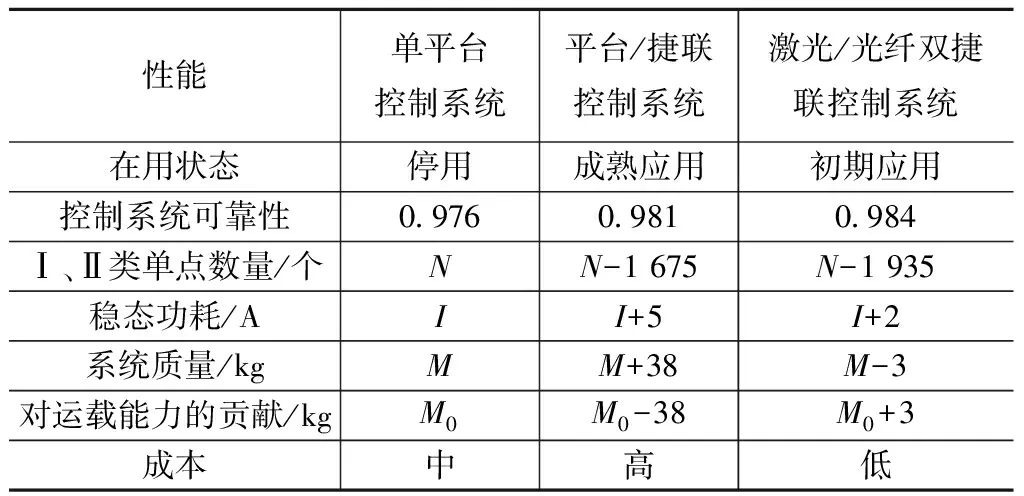
表2 不同控制系统特点
综上所述,从可靠性、经济成本、运载能力等角度综合考虑,运载火箭采用双八表激光/光纤惯组冗余方案可减轻火箭末子级的质量,提高运载火箭的运载能力,是相对合理的选择。
2 关键技术研究
2.1 双捷联控制系统组成
控制系统由制导、姿态控制、时序配电三个子系统构成,原理如图1所示。
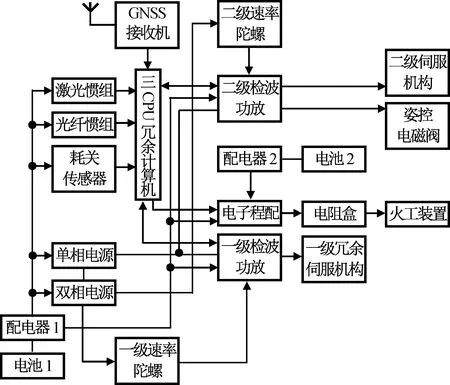
图1 双捷联控制系统原理Fig.1 Principle of dual-strapdown inertial control system
制导子系统采用基于卡尔曼滤波技术的组合导航方案。其本质是将捷联惯组的速度位置导航值与GNSS的测量值经卡尔曼滤波得到修正量,对捷联导航进行修正,以实现捷联导航误差消减。它融合了捷联和GNSS两者的优点,取长补短,可获得更高的导航精度。
姿态控制子系统,一级飞行段采用双捷联惯组、一二级速率陀螺故障吸收、校正网络和摇摆发动机的数字控制方案;二级飞行段俯仰偏航通道采用双捷联惯组、速率陀螺、校正网络和摇摆发动机/姿控喷管的数字控制方案,滚动通道采用双捷联惯组、校正网络和摇摆发动机/姿控喷管的数字控制方案。
时序配电子系统采用箭机+电子程配方案,主要包括箭上电池、二次电源、配电器、箭载计算机、电子程配、电阻盒和电缆网。运载火箭飞行中,由箭机按飞行程序发出电子程配地址码,电子程配发出相应的时序指令完成点火、关机、分离等动作。
2.2 双捷联系统故障诊断与决策
2.2.1 工作模式选择
双捷联由捷联A(激光)和捷联B(光纤)组成,捷联内部陀螺和加表均采用三正一斜方案,即3个正装表的敏感轴与箭体坐标系相互对应平行,2套捷联的斜表安装角度不一致,陀螺为单自由度陀螺,当两个惯组均正常或均故障时,采用激光惯组进行控制。双捷联组成如图2所示。
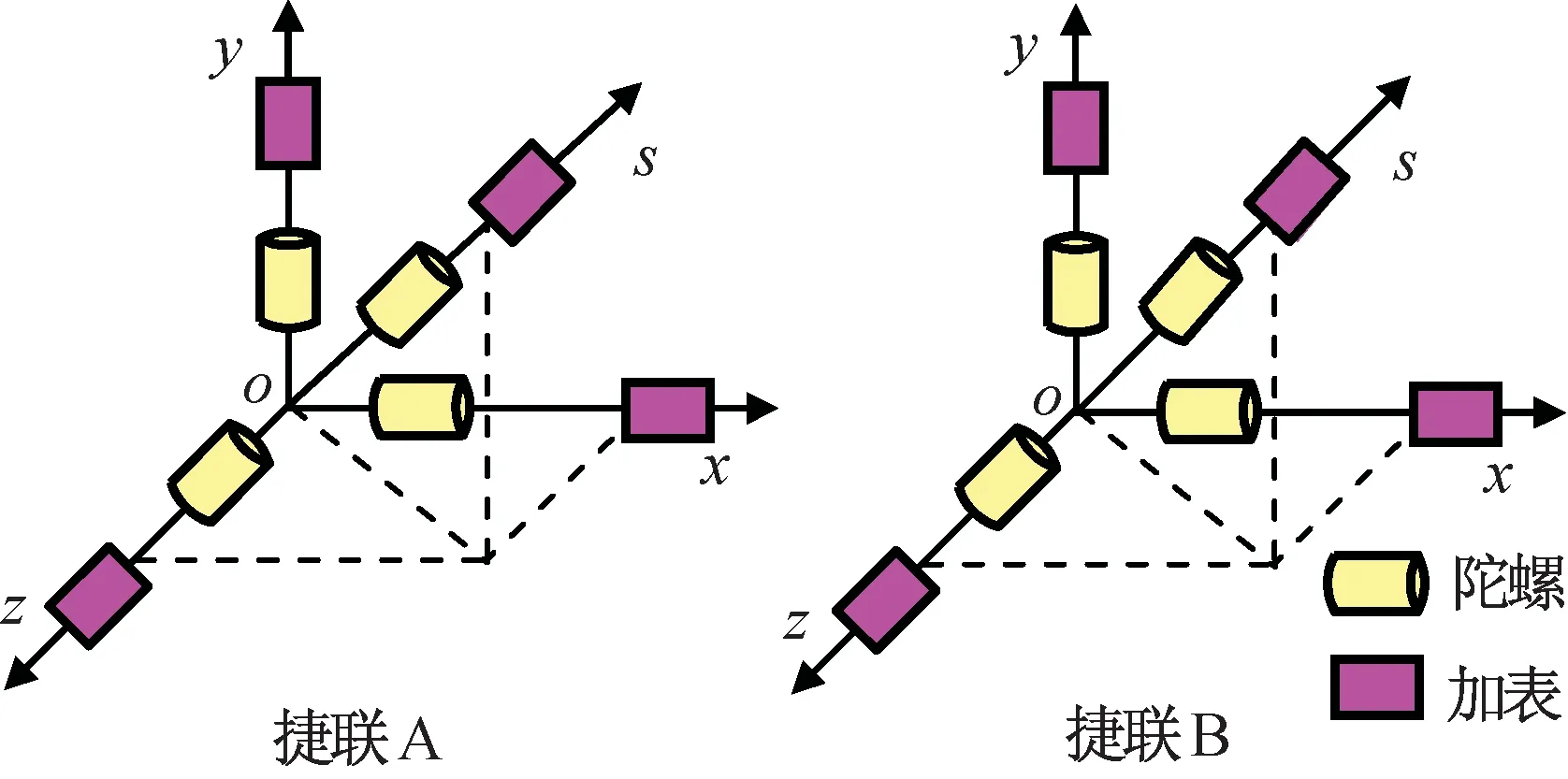
图2 双捷联八表方案系统组成Fig.2 Composition of dual strapdown inertial system with two 8 meters
两套捷联惯组的数据解算在箭机中进行,采用两套导航方程分别解算。双捷联故障诊断只从起飞开始运行,直至飞行结束。在射前通过捷联地测微机接收的数据判断两套惯组工作是否正常。
双捷联系统故障判别时视捷联A为主、捷联B为从方式,双捷联系统完好或无法重构时选择捷联A参与控制;捷联A、B为主从工作模式。因捷联A为激光惯组,技术较捷联B光纤惯组成熟,故以捷联A为主,正常情况下默认捷联A参与导航;捷联解算采用两套导航方程,双捷联故障切换采用故障总数累加的方式;因斜表只用于故障诊断,不参与导航,且在捷联A正装表正常、斜表故障时还能用捷联A的正装表导航,因此仅当正装表故障时计该惯组故障,而斜表故障不计入;不能判别是正装表故障还是斜表故障时,计该惯组故障。
双捷联八表惯组系统的特点有:实现陀螺、加表的自检功能;实现陀螺、加表的交叉互检功能;主备份惯组整体切换实现方便;故障诊断信息源多,主备份惯组信息重构实现复杂。
2.2.2 系统故障诊断及决策流程
双捷联采用剔除野值+常零故障判别+正斜一致性判别+交叉判别的方法进行故障诊断和决策,故障诊断的周期为25 ms,故障诊断在箭机接收到惯组的测量信息后,在导航、制导和姿控等运算前进行。故障诊断及决策相关流程如图3所示。
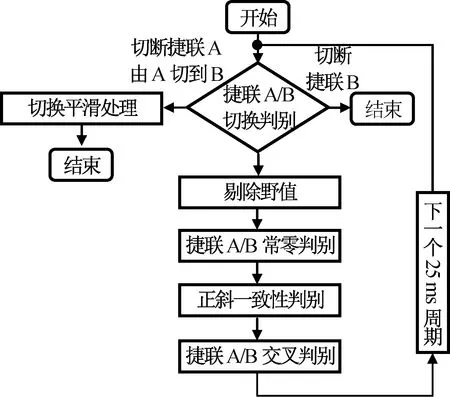
图3 双捷联故障诊断及决策流程Fig.3 Flowchart of fault diagnosis and decision of dual strapdown inertial system
2.3 基于三自由度全量模型的解耦控制
目前CZ-2D运载火箭姿态控制系统设计采用基于标准弹道的小偏量摄动姿态动力学模型,由经典控制理论,在频域内进行参数(校正网络、静态放大系数)调试、设计,给出系统稳定结论及稳定性指标,并通过时域仿真进行控制指标验证。
为提高CZ-2D运载火箭任务适应性,双捷联控制系统采用全方位发射技术,即地面固定瞄准,起飞后根据不同弹道要求实施空中滚转定向,使火箭由发射射面转到飞行射面。在实现空中定向前(起飞0 s~程序转弯17 s),发射惯性系与箭体系间存在较大滚动角。操纵机构在进行横向姿态控制时,将同时形成发射惯性系与箭体系间两个欧拉角的角速度及角度(俯仰及偏航),进而形成横向姿态运动控制耦合。一级姿态控制系统为多变量控制系统,输入输出间彼此响应产生交连,因此通过解耦控制方法将多变量系统解耦为单变量系统再分别进行控制,这样能继承型号常规单通道频域设计方法。在空中定向完成后,三通道耦合影响在频域设计时可忽略,分别单独设计。
因此,将现役运载火箭三自由度小偏量摄动姿态动力学模型改为三自由度全量模型,并采用解耦控制方式,可实现全方位发射等一系列新技术在工程实施要求下的应用。解耦控制可采用在工程中应用较广的对角优势化法,在被控对象前面加入预补偿器Kp(s),使Q(s)=G(s)Kp(s)成为对角阵或对角优势阵,以消除或减弱各回路间的相互关联。
2.3.1 三自由度全量动力学模型
先建立箭体质点系中任意一点矢径混合坐标的通用表达形式,按质点系模型、刚体模型、质量-弹簧-阻尼器模型,采用基于混合坐标的牛顿-欧拉法,统一建立火箭质心运动方程、火箭绕质心转动运动方程和推进剂晃动方程;采用集中质量分支梁模型描述火箭相对等效刚体的复杂弹性振动,用有限元法和振型叠加法导出火箭弹性振动方程。
2.3.2 姿控系统解耦控制
在全方位发射状态下,采用逆奈奎斯特阵列法对系统进行分析和设计。逆奈奎斯特阵列法的基本设计思想是:先在被控对象前或后(或同时在其前和后)加入一个预补偿器(通常可用1个常数矩阵描述),以减弱而非完全消除各回路间的相互关联,使系统的开环传递函数或前向传递函数矩阵成为对角优势阵。这样,系统的设计就可简化为一组单变量系统的补偿设计[5]。该法的关键是对被控对象进行预补偿,使其传递函数矩阵具对角优势的性质。
在多变量系统(如图4所示)中,G(s)为被控对象,即箭体模型;K(s)为预补偿器,一般用于削弱控制对象各回路间的交连,使系统的传递函数矩阵变为对角矩阵或对角优势矩阵;F为传感器的反馈增益矩阵,通常为常数对角矩阵;C(s)为分别对各回路进行动态优势校正的补偿器(即校正网络),它亦为对角矩阵。实际物理系统中,静态比例系数在F,C(s)间统筹分配,以保证总增益达到要求。
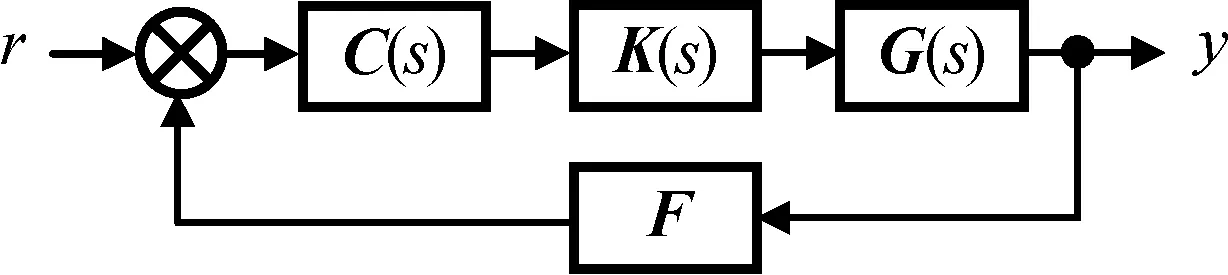
图4 多变量系统结构Fig.4 Structure of multi variable system
由逆奈奎斯特阵列法的基本思想可知:采取该方法设计多变量系统的主要任务是设计预补偿器K(s),使G(s)K(s)为对角优势阵;依照确定反馈增益阵F;对各补偿后的G(s)K(s)各对角元分别单独设计动态补偿器C(s),以满足系统的动态性能要求。以偏量模型为控制对象,用逆奈奎斯特阵列法对偏量模型进行解耦后,就可用现型号成熟的单通道设计方法,得到所需的校正网络。
对采用解耦控制方法后的系统进行设计,将数字仿真后结果与已参加飞行的原模型设计结果比对,两者一致性较好。在空中滚转定向完成前,系统频域设计基于三通道耦合模型。在给定滚转角速度下,经解耦后的各通道箭体频率特性与对应的双捷联初样状态单通道箭体频率特性接近;完成空中滚转定向后,系统设计基于双捷联状态下的单通道模型。根据任务要求数据算出的箭体各通道频率特性,与原模型对应通道的频率特性接近;在主动段额定、上限、下限状态,系统稳定裕度指标与成功型号相当,能满足稳定飞行与控制要求。
2.4 卡尔曼滤波组合导航
卡尔曼滤波器是基于最优控制理论推导、具最优估计结果的滤波器,其理论成熟,工程中应用广泛,尤其是用于初始对准、组合导航的随机误差特性信号处理,国外如美国的安塔瑞斯运载火箭就应用了组合导航技术[6-8]。
卡尔曼滤波器滤波效果取决于两方面:一是组合导航系统建立的动力学模型复杂性及可信性决定了滤波器的品质,另一是卡尔曼滤波器采用的观测量数量也决定了系统状态的可观性,同时观测量的精度也会严重影响系统状态的滤波结果[9-10]。目前惯导系统误差模型及卫星导航误差规律经多年的工程实践,已能推导出较精细、工程实用的组合导航动力学模型,同时GNSS设备作为现役运载火箭外测设备,能可靠精确地提供外弹道测量数据,作为组合导航速度、位置观测信息源,具较高的观测精度。在不增加其他导航设备的基础上,仅依靠箭上惯导系统、GNSS,充分利用卡尔曼算法的优势实现了对导航参数的精确估计。
目前,运载火箭上较成熟的组合导航方案主要有两种:一种是基于卡尔曼滤波算法的组合导航方案,另一种是简单重调方案。两种方案的导航模型有较大差异,但对数据同步性、信息容错性等要求基本一致。两种组合导航方式的优缺点如下:
a)简单重调式组合导航的优点是工程实现较简单,直接利用GNSS的信息修正惯导系统的测量信息,缺点是组合后的精度只能接近组合中精度较高的导航系统精度;
b)卡尔曼滤波技术算法相对较复杂,需对各误差源进行准确建模,对箭机的运算能力要求较高,但组合后的精度高于组合前任一导航系统单独使用的精度;
c)理论上卡尔曼滤波技术组合后的精度高于简单重调式。
兼顾组合导航的实用性和先进性,双捷联控制系统采用基于卡尔曼滤波技术的组合导航方案。其原理是将捷联惯组的速度位置导航值与GNSS的测量值经卡尔曼滤波计算得到修正量,对捷联导航进行修正,以实现消减捷联导航误差。它融合了捷联和GNSS两者的优点,取长补短,从而获得更高的导航精度。
2.4.1 组合导航状态模型设计
采用状态变量分别为位置误差、速度误差、姿态角误差、加表的一阶马尔科夫过程,以及陀螺的一阶马尔科夫过程的15维状态模型。因采用姿态角误差的15维状态模型中含有大量的三角函数运算,故对状态模型进行了优化,将姿态角误差状态变量改为捷联数学平台失准角。经静态试验离线仿真验证,导航精度与姿态角误差作为状态变量的状态模型精度相当。
15维状态模型完成一次递推计算需要乘法计算约20 601次(含少量除法运算)和加法运算约18 471次。组合导航算法已在地面静态验证试验中得到了验证,一次所需的计算时间约250 ms,其中在运行过程中的时间开销还包括双口RAM通信时间。采用此模型静态条件下2 000 s的组合导航精度为速度偏差约0.5 m/s,位置偏差50 m。
2.4.2 组合导航设计
组合导航系统由激光惯组、光纤惯组、三CPU冗余箭载计算机、GNSS接收机、飞行控制软件等组成,如图5所示。
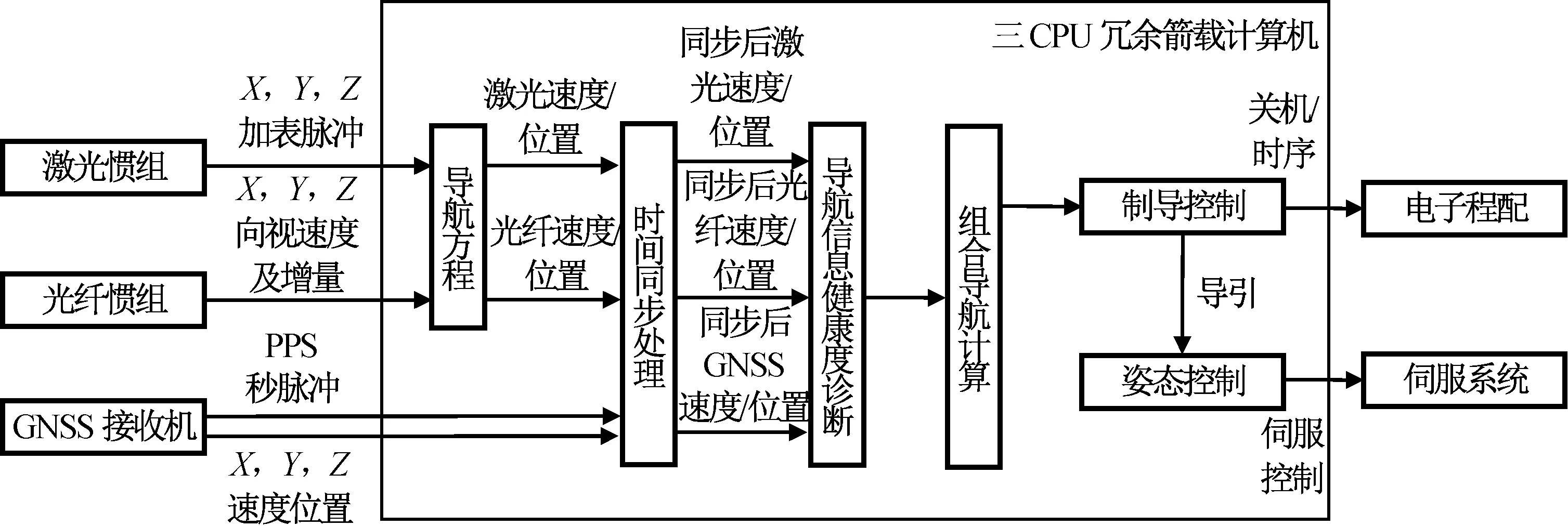
图5 组合导航系统组成Fig.5 Composition of integrated navigation system
依据影响捷联系统误差的关键因素,确定了3个位置误差、3个速度误差、3个失准角误差、3个加表的一阶马尔科夫过程,以及3个陀螺的一阶马尔科夫过程作为系统的状态变量,组成了一个15维的系统状态方程作为滤波模型;观测方程中,取惯导与GNSS的位置、速度偏差为观测量;系统方程、观测方程中相关误差特性均为均值为零的白噪声;反馈方式采用开环反馈,加表、陀螺相关滤波结果不作为误差修正参数反馈回惯导系统,仅利用速度位置的滤波结果重调惯导相关导航结果。
用蒙特卡罗打靶法进行仿真,对每条打靶子样每秒点精度进行统计,得到各子样每秒点的速度位置偏差统计特性,并对各秒点的统计特性进行平均,综合飞行中各秒点的统计特性以考核滤波算法的精度。用此方法统计,打靶1 000次得到的滤波结果,考核对火箭入轨精度的影响,仿真结果见表3。由表3可知:入轨精度较非组合导航状态得到提高。

表3 火箭入轨精度
2.5 双捷联方位瞄准
运载火箭的初始对准分为水平对准和方位对准两部分,一般要求水平对准误差小于30″,方位对准误差要求小于1.5′。对箭上惯性制导系统,利用其加速度计测量即可满足水平对准精度要求,但陀螺精度很难满足方位对准的要求。因此,当运载火箭采用双捷联惯组控制系统方案时,应尽量借鉴现有平台瞄准模式,利用自准直光路原理,使用经纬仪瞄准捷联惯组上装载的棱镜,以在大距离范围内实现角分级或角秒级的角度测量精度。
双捷联状态棱镜通过捷联惯组与箭体固联,棱镜姿态随箭体姿态易受风力或振动等外界因素影响,使光电自准直测量含误差[11]。此外,由于棱镜棱脊不平产生像旋会造成准直测量误差,为确保方位对准最终精度,必须对此误差项进行修正。

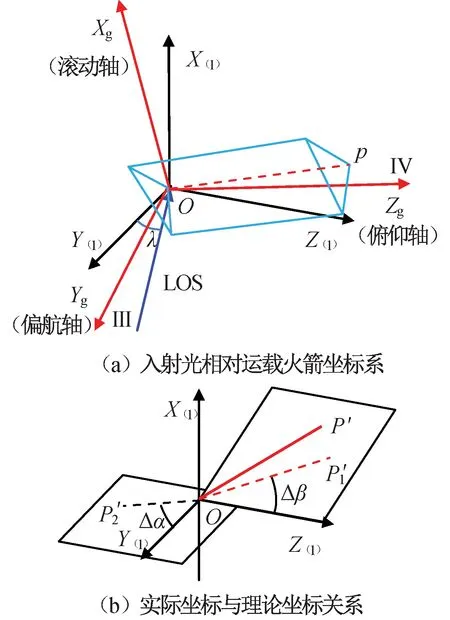
图6 光学方位瞄准原理Fig.6 Principle of optical azimuth aiming
根据直角棱镜棱脊倾斜对方位瞄准的影响研究,直角棱镜棱脊不平引起准直测量偏差可表示为
).
(1)
当λ取值远大于Δα1时,式(1)可化简为
Δα=tan(λ)·(Δβ+Δβ1).
(2)
需说明的是:从严格意义上说,Δα1,Δβ,Δβ1是直角棱镜相对水平面的姿态变化表示,Δα1是棱镜在主截面内相对初始状态的变化,Δβ,Δβ1是棱脊相对初始状态的变化量。如采用斜瞄方案,因λ取值远大于Δα1,可用式(2)计算误差和补偿值。
当运载火箭发射前燃料加注完毕,在发射点坐标系中箭体结构将出现微小变化,安装捷联惯组的箭上平台水平面倾斜角产生变化,箭体滚转方向(方位角)也会发生变化。记录并转动经纬仪方位角进行激光准直,记录实际偏离射向角度和经纬仪俯仰角,提供给控制系统进行运载火箭起飞前惯性坐标方位补偿计算。光纤惯组的方位角偏差通过一体化安装支架保证,用事先测量的激光惯组与光纤惯组的安装偏差进行补偿。
重新定向需重新对准瞄准点和相应的基准点,包括经纬仪和标杆仪的调平对心,对大地测量提出新的要求:大地测量标定出标准射向后,还需以发射点F为中心,在瞄准点和基准点左右侧各标定出±μ位置,如图7所示[12]。
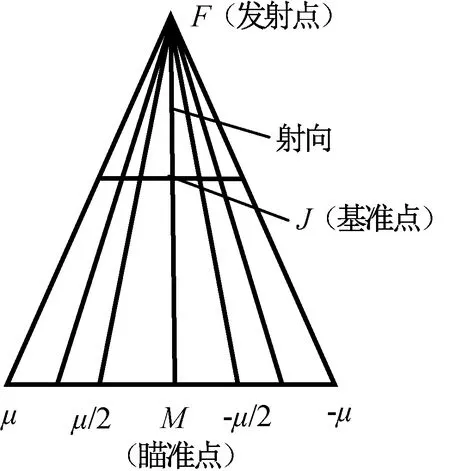
图7 标定点位置Fig.7 Position of calibrated point
2.6 三CPU冗余计算机
CZ-2D火箭采用的三CPU冗余计算机,整机共有3个CPU,如图8所示。飞行控制软件在每个CPU上独立运行,CPU间通过双口RAM实现同步和数据共享,输出采取三取二方式。具体工作原理为:每块CPU板接收激光、光纤惯组发送的陀螺脉冲、加表脉冲信号,接收GNSS接收机发送的导航信息,读取AD板采样速率陀螺的信号,三取二后进行差分方程运算、综合量方程运算、导航方程运算、组合导航计算、关机方程运算等,计算出4路综合量、关机信号、电子程配地址码、程序角信号、6路姿控等数据信息,经双口RAM进行数据交换后,由CPU三取二表决(软件表决)后输出表决后的CPU板信息给表决器,表决器(硬件表决)最终决定输出哪块CPU板的运算结果,同时CPU板输出遥测量数据。
按功能的重要性,从系统上对箭机采取冗余的方式,主要对CPU模块、A/D、D/A进行了三冗余设计;对捷联失稳信号输出、关机信号输出进行了串并联冗余设计;对姿控输出采用了双冗余设计。
飞行控制软件为嵌入式控制软件。飞行控制软件充分继承了已经成功飞行考核的相同产品或类似产品的软件设计,软件在模块级进行了分析和重用。飞行控制软件有模块239个,其中继承模块138个,继承率57.7%;新研模块101个中45个为控制类模块,其他56个模块为初始化、箭地通信、遥测和捷联地测模块。飞行控制软件除通过单元测试、组装测试、配置项测试、第三方测评、系统综合试验和集成综合试验进行确认验证外,还在研制单位搭建飞行控制软件验证和测试平台,采用多轮次软件验收和小系统老练试验加强软件的试验验证和考核强度,采取增加测试用例和长时间反复测试验证的方式,以保证更改措施验证的充分性。
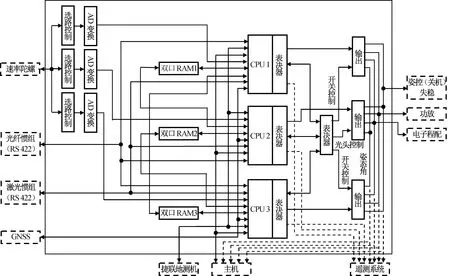
图8 三CPU冗余计算机原理Fig.8 Princilple of 3 redundant CPUs
3 飞行试验验证
2015年12月17日,采用激光/光纤双捷联冗余控制系统的CZ-2D运载火箭成功发射悟空暗物质粒子探测卫星,实现了双捷联冗余技术在该型运载火箭中的成功应用,进一步验证了双捷联冗余技术总体设计方案的正确性。经对遥测数据分析,运载火箭飞行过程中双捷联箭机秒节点故障计数均为0,全程无故障。通过对惯组25 ms脉冲数据和箭机秒节点遥测量分析可知:双捷联故障诊断门限设置合理,惯组工作正常,全程未出现故障。
3.1 制导系统
运载火箭在激光惯组主控状态下精确入轨,精度满足卫星要求,相对卫星指标要求具有较高的入轨精度。本发运载火箭入轨精度,相对传统状态半长轴、倾角偏差提高了1个量级,具较高的精度;外测GNSS计算轨道根数与精轨值基本相当,相互验证了数据的可信性。3个通道程序角遥测值与预设程序角相同,程序角插值功能正常。组合导航抑制惯导漂移的影响明显;偏差数值与成功运载火箭内外弹道差基本相当。相对非组合导航状态,在组合导航系统作用下外、内弹道导航偏差得到了有效控制,组合导航效果明显。
利用实际飞行遥测数据在开环状态下对组合导航前的激光、光纤惯组入轨精度进行了仿真,结果均在指标要求范围内,激光、光纤惯组表现正常,满足任务要求。
3.2 稳定系统
飞行时段中姿态控制系统工作正常,最大姿态角和发动机摆角均在设计指标范围内,确保了火箭在飞行过程中的稳定性,使火箭准确地沿预定轨道飞行。系统输入、输出量平稳,变化规律正常,说明姿态控制系统工作正常,设计合理,并有足够的稳定裕量。星箭分离姿态角和姿态角速率较小,满足任务书要求。起飞后17 s程序转弯时滚动角变化正常,空中滚转定向功能正常。
3.3 时序配电系统
在整个飞行试验过程中,时序指令系统准确完成了一、二级发动机点火和关机、级间分离、卫星整流罩分离、星箭分离等多项时序控制任务,系统均工作正常。点火时序最大偏差、飞行时序最大偏差均满足相对偏差≤±100 ms的指标要求。
4 后续研究思考
4.1 二度故障重构率提高
目前,双八表惯组对故障诊断方案的重构采用简单模式,即惯组A、B的整体切换,一度故障模式下可100%重构;二度故障模式下,只有当故障出现在同一套捷联中或两惯组的斜表均故障时才能重构,重构率约60%。虽然系统实现简单,但应对故障模式的重构率不高。后续可考虑采用复杂模式即采用惯组A、B的陀螺或加表可相互组合模式,提高二度故障时的重构率。
4.2 组合导航改进
目前卡尔曼滤波状态仅对速度、位置进行修正,后续可考虑对姿态角偏差的观测数据进行反馈控制,以实现对火箭飞行姿态的修正,降低对初始对准的精度要求。另外,可引入北斗导航信息,实现产品的三模工作模式,进一步提高产品的可靠性,同时开展产品冗余设计改进,减少Ⅰ、Ⅱ类单点数量。
4.3 双捷联主备份互换
目前,激光惯组与光纤惯组与控制计算机的数据发送接口、5 ms同步接口完全相同,飞行软件对两组数据同时开展导航运算。后续可考虑实现主备份互换。
4.4 大角度空中滚转定向
目前已经飞行的双捷联冗余状态任务,空中滚转角度最大约0.36°,初步验证了三通道的解耦控制技术,但滚转角度相对偏小。后续可考虑实施大角度滚转。
4.5 十表惯组应用
八表惯组只能定位到惯组工作是否正常,当8个表中任何一个发生故障时,无法通过系统重构完成飞行任务,必须利用另一套惯组进行辅助判别。两套惯组方案异构可靠性高,但存在成本较高,需对两个惯组的方位一致性进行测试等缺点。
十表惯组是在八表惯组的基础上增加了1个陀螺和1个加表两个斜置的表头,在任何一个仪表发生故障时,系统通过重构仍能满足任务需求。目前十表激光惯组已在国内上面级上获得了成功应用,已有的十表光纤惯组的陀螺零偏月稳定性由0.05 (°)/h提高至0.01 (°)/h,其他技术指标与激光惯组一致。十表光纤惯组具有成本低、故障诊断简单、安装测试方便等优点,兼顾了可靠性、经济性和简易性的要求,后续可考虑在型号中推广应用。
5 结束语
CZ-2D运载火箭双捷联冗余技术经过方案论证、初样及试样阶段研制工作,已成功在CZ-2D运载火箭上进行了飞行实践应用,实现了早期的研发目标。这表明:双捷联冗余方案的关键技术已获得突破,验证了方案的正确性和合理性;双捷联冗余技术在可靠性、单点故障、经济成本及对运载能力贡献等方面的优势明显;目前飞行子样相对较少,在故障诊断与重构、门限设计等方面尚待深入研究;光纤惯组的相对成本低、结构简单,具高稳定性和抗干扰性,在工程实现中有较大优势,经过飞行试验验证,积累了成功的子样,光纤惯组的应用将是发展趋势;目前十表光纤惯组的精度已达到激光惯组的水平,从成本控制、系统实现及高可靠等角度考虑,十表光纤惯组在后续宇航领域中的广泛应用是一个必然趋势。
[1] 徐延万, 余显昭. 导弹与航天丛书-液体弹道导弹与火箭系列——控制系统(上)[M]. 北京:宇航出版社, 1989.
[2] 金杰, 王玉琴. 光纤陀螺研究综述[J]. 光纤与电缆及其应用技术, 2003(6): 4-7.
[3] 单夫惟, 马乐梅. 光纤陀螺发展与应用[J]. 光电子技术信息, 2004, 17(4): 12-14.
[4] 张桂才. 光纤陀螺原理与技术[M]. 北京: 国防工业出版社, 2010.
[5] 高大远, 沈辉, 董国华, 等. 鲁棒逆奈奎斯特方法中鲁棒Gershgorin带的近似估计[J]. 自动化学报, 2007, 33(4): 435-438.
[6] 蒋金龙, 穆荣军, 王刚, 等. GPS/SINS组合导航系统在运载火箭中的应用[J]. 中国惯性技术学报, 2007, 15(4): 442-444.
[7] 陈新民, 谢全根. 可应用于运载火箭上的组合制导方法研究[J]. 宇航学报, 2004, 25(3): 346-349.
[8] 袁信, 郑谔. 捷联式惯性导航原理[M]. 北京: 航空工业出版社, 1985.
[9] 秦永元. 卡尔曼滤波与组合导航原理[M]. 西安: 西北工业大学出版社, 1998.
[10] 俞济祥. 卡尔曼滤波及其在导航中的应用[M]. 北京: 航空工业出版社, 1984.
[11] 高立民, 陈良益. 直角棱镜棱脊倾斜对方位瞄准的影响[J]. 光子学报, 2002, 31(1): 117-119.
[12] 万德钧. 惯性导航初始对准[M]. 南京: 东南大学出版社, 1990.
Development and Implementation of Dual-Strapdown Inertial Redundant Technology in CZ-2D Launch Vehicle
TAN Xue-jun1, HONG Gang2, LI Jian-qiang2, YAO Rui-fang2
(1. Shanghai Academy of Spaceflight Technology, Shanghai 201109, China; 2. Aerospace System Engineering Shanghai, Shanghai 201109, China)
The development and implementation of dual-strapdowm inertial redudant technology in CZ-2D launch vehicle was introduced in this paper. The application necessity of two 8 gyros/accelerometers and fiber gyro and the advantage of laser/fiber inertial unit were presented. The control system of dual laser/fiber inertial unit using master and slave redundant design was given out. The breakthrough key technologies of fault diagnosis and decision making, omni-directional launch, integrated navigation, azimuth aiming and its parameter measurement, and 3 redundant CPUs were presented. The overall design of the dual strapdown intertial redundant in CZ-2D launch vehicle had been proved by the flight. The rising of two degree fault reconstruction rate, improving of integrated navigation, switching between main and secondary unit, rolling orientation with large angle and 10 gyros/accelerometers application for follow-on development were proposed. The application of dual strapdown inertial redundant technology has improved the flight reliability and mission adaptability as well as injection accuracy, and it has also reduced the mass of final stage and enhanced the launching ability of the vehicle. It accumulated the success samples of fiber gyro application in launch vehicle.
Launch vehicle; Laser gyro; Fiber gyro; Redundancy; Two 8 meters; Fault diagnosis and decisionmaking; Integrated navigation; Omni-directional launch; Azimuth aiming
1006-1630(2016)04-0001-09
2016-06-15;
2016-07-14
“十二五”民用航天产品高可靠长寿命项目资助
谈学军(1964—),男,研究员,长征二号丁运载火箭、远征三号上面级总指挥,享受国务院政府特殊津贴,主要研究方向为运载火箭控制、可靠性等。
V448.1
A
10.19328/j.cnki.1006-1630.2016.04.001
