小型半喂入水稻联合收割机简易割台的设计
2016-12-19孔朵朵王泽宇
肖 龙,尹 健,孔朵朵,张 奎,王泽宇
(贵州大学 机械工程学院,贵州 贵阳 550025)
小型半喂入水稻联合收割机简易割台的设计
肖 龙,尹 健▲,孔朵朵,张 奎,王泽宇
(贵州大学 机械工程学院,贵州 贵阳 550025)
割台作为收割机最重要的部件之一,是关系着收割机性能能否满足需求的关键模块。本次设计的简易割台通过单拨禾星轮完成对收割水稻的导入,并使用平行四边形机构保证割台高度调节前后始终与地面保持平行。文章主要研究了拨禾星轮的尺寸参数,轮廓曲线以及倾斜角度等内容。
割台,拨禾星轮,水稻,收割机
0 引言
水稻收割机的割台按扶禾方式来区别,主要可分为偏心轮式,链式和拨禾星轮式等。其中偏心轮式由两个偏心轮和梳齿组成一个大滚筒,这种割台结构简单,对一般倒伏水稻具有扶正作用,但体型也大,因此常用于全喂入收割机;链式扶禾一般以链条和拨指构成,体积较小,对倒伏具有较强扶正作用,但结构比较复杂,且成本高;拨禾星轮式结构简单,成本低,对一般情况可以满足要求。
我国南方丘陵地区,特别是西南部分山地区域,由于其地形,交通,经济发展水平等的局限,要求水稻收割机必须体型小,结构简单而且价格较低。因此,拨禾星轮式扶禾的割台能更好的满足需求。
1 割台设计
1.1 割台主要组成部件
经过多次试验和改进,本次设计的简易割台由拨禾星轮完成扶禾功能,并对其他部件进行了一定程度的改进[1]。割台(图1)主要由拨禾星轮、分禾器、禾杆输送装置、高度调节装置和割刀5个主要部分组成。
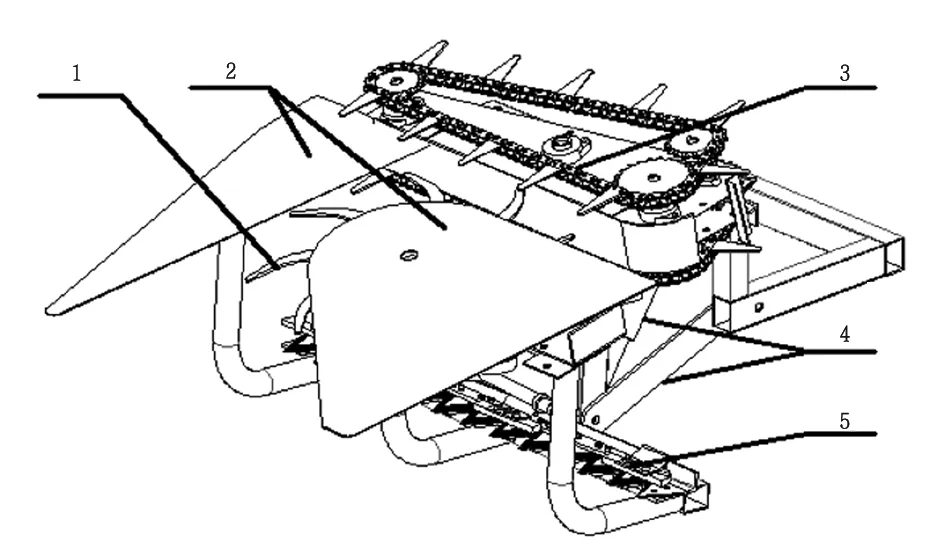
1-拨禾星轮;2-分禾器;3-禾杆输送装置;4-高度调节装置;5-割刀
1.2 拨禾星轮
1.2.1 星轮分度圆半径R分计算
如图2所示,工作时扶禾星轮由横向传送链条带动顺时针旋转,在作物被割断后沿着AE线从左至右经拨禾指和导禾杆输送。收割机前方收割区域可分为一、二、三区(如图中L1,L2,L3),其中二区的水稻收割时被带动倾斜量最小,一、三区较大,所以为保证跨距S内切割倾斜角尽量小,需要使一、三区宽度相等,从而使两区域最大倾斜角相等。

1-分禾器;2-拨禾星轮;3-切割
因为
L3=R分
(1)
L1=L3=R分
(2)
L2=R分+Δ
(3)
S=L1+L2+L3=3R分+Δ
(4)
所以
R分=(S-Δ)/ 3
(5)
式中:S—拨禾星轮总跨距;
L1,L2,L3— 一,二,三区宽度;
Δ—左分禾器最右端B点与拨禾星轮最左端C点距离;
R分—拨禾星轮分度圆半径。
总跨度S距离约为600 mm,Δ一般取10 mm左右,代入式(5)得R分=197 mm,由于星轮由横向输送链条带动,所以半径还需根据链条节距略微调整,以确定最后的拨禾星轮直径。
1.2.2 拨禾轮齿数Z的确定
在链条节距已定的情况下,齿数计算公式如式(6):
(6)
式中:t节—横向输送链条节距;
Z—拨禾星轮齿数。
由于t节=25.4 mm,R分=197 mm
代入t节和R分,得:Z=48.6,由于齿数需为整数,所以取Z=48,齿数太多,使六个横向链节啮合一个拨禾轮指,得Z=8。
由齿数和链条节距的数值,根据公式(6)逆推得R节=194.2 mm。
1.2.3 拨指工作轮廓的确定
由于拨指曲面的工作轮廓确定后需满足以下两个条件:
1)切割完成后,禾杆被横向输送链条往右传动时,星轮脱离链条时摩擦力足够小,使星轮顺利和禾杆脱离,不出现“带草”现象。
2)拨禾过程中,保证齿面与禾杆的摩擦力够大,使禾杆不会滑动脱离拔禾星轮。
如图3所示。

图3 星轮工作示意图
脱离阶段为XOY区域,对于任意工作点A2,要保证禾杆沿着拔禾星轮的轮廓线滑动,顺利脱离,则必须摩擦力足够小,即合力与接触面法向夹角大于摩擦角φ,经换算得角α>2φ,即:
(7)
式中:Ф—A2点齿面切线MN与极径OA2(ρ)的夹角;
ρ—A2点极径OA2的长度;
a—A2点极径OA2在Y轴上投影的长度;
α—A2点处齿面切线与A2点与X轴平行的直线ST的夹角。
我们可以用式(7)来画出星轮工作面的轮廓线。由式(7)可知,只需确定参数角α,长度a,就可算出每一个极径长度ρi对应的Фi角大小。由于角α>2φ,而稻杆与星轮的摩擦角范围为φ=17°~35°,为使稻杆能轻松脱出,取∠α=75°。为使齿间容量最大可能扩充,长度a应尽量靠近齿根圆,所以取a为最小极径a=ρ0=80 mm。
根据式(7)和上面的数据,得出极径长度ρi与对应的Фi角数据如表1。
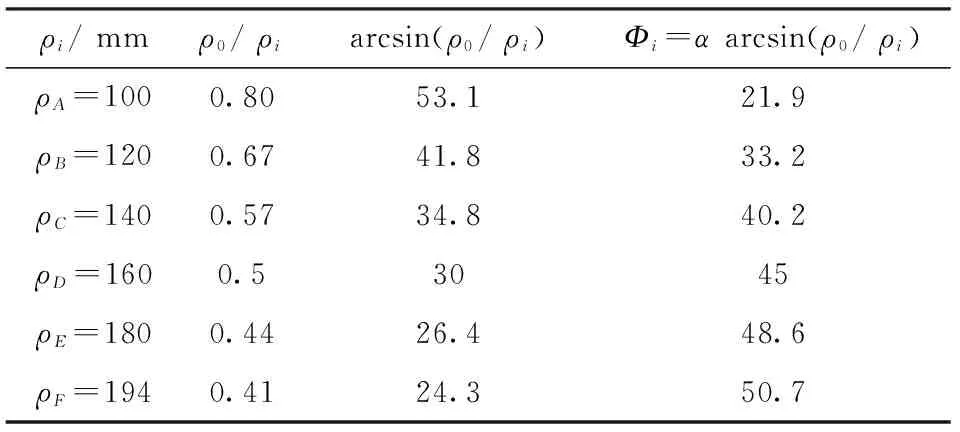
表1 ρi ,Фi值对应表
如图4所示,建立XOY坐标系,在Y轴正半轴上取长度为ρa=100得到点A0,以A0为起点作直线A0A1,使∠OA0A1=Фa=21.9°,在A1A0的延长线上取一点B0,使OB0=ρB=120 ,以B0为起点作直线B0B1,使∠OB0B1=ФB=33.2°,用相同方法可得到C0,D0,E0和F0。用圆滑的曲线连接A0到F0,即可得到拨禾星轮的工作曲线。
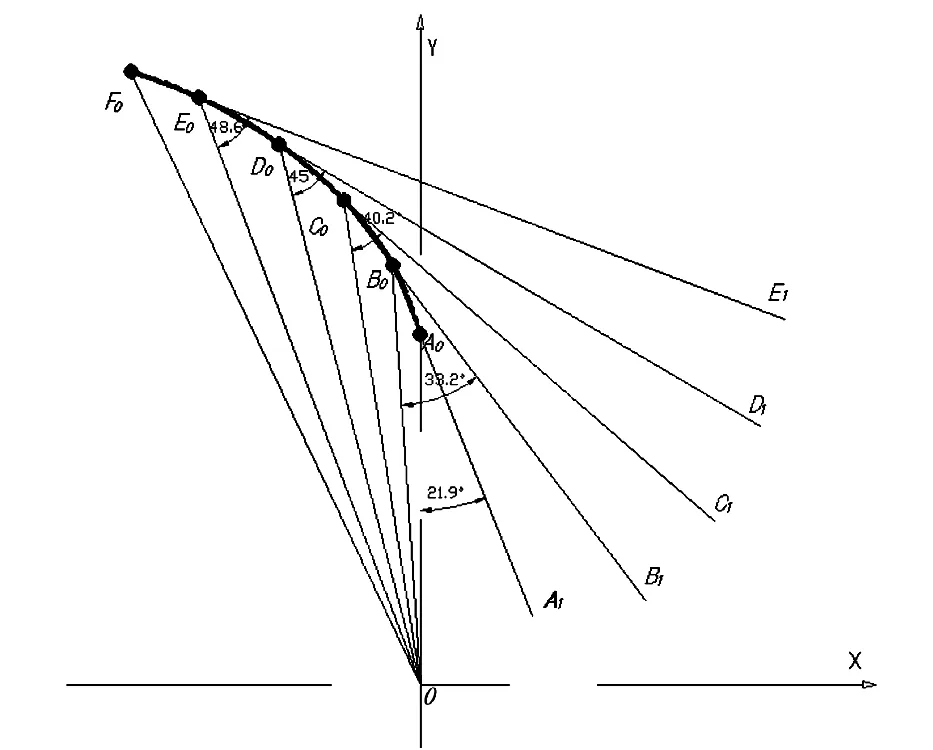
图4 拨禾星轮工作曲线
如图3中拔禾阶段为-XO-Y区域,在拔禾阶段任意一点A1,当A1为为工作点与禾杆接触时,禾杆受到A1C方向由机器行走带来的力和A1B方向由拔禾轮转动带来的力作用,若要使齿面的摩擦力足够大,则A1B,A1C两个方向形成的合力A1D的方向与A1处的法线AE的夹角β小于摩擦角φ。
所以有:
(8)[2]
式中:Ф—A1点齿面切线MN与A1点极径OA1(ρ)的夹角;
Vs—A1点线速度;
VM—收割机行走速度;
R节—星轮节圆半径,标准安装时等于分度圆半径;
τ—A1O与X轴的夹角。
由式(8)可知,β角的大小取决于Vs和Vm的比值,选择合适的比值,即可保证角β小于摩擦角φ。
1.2.4 拨禾星轮外形确定
根据已得出的星轮半径R节、齿数Z和确定的工作曲线,保证足够的齿间容量的前提下,选择合适的拨指顶部过渡圆弧半径r和拨指宽度,稍加调整即可绘制出拨禾星轮的外形轮廓图,如图5。
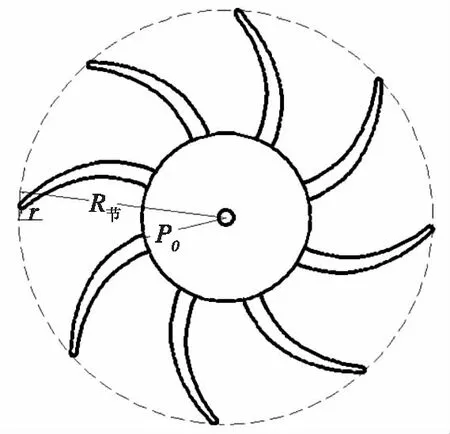
图5 拨禾星轮外形
1.2.5 能收获植株倾斜角度计算
在不影响星轮转动的前提下,将拨禾星轮倾斜一定角度可使收割机具有收割一定角度内的倒伏植株的功能,提升收割性能。
如图6所示,拨禾星轮与倾斜植株都处于极限位置,此时收割机对植株扶正能力最强,待收获植株倾斜角度θ最大。在已知链条宽度d=18 mm,高度B1=8 mm和拨禾星轮拨指厚度B2=3 mm,倾斜角θ计算过程如下:
(9)
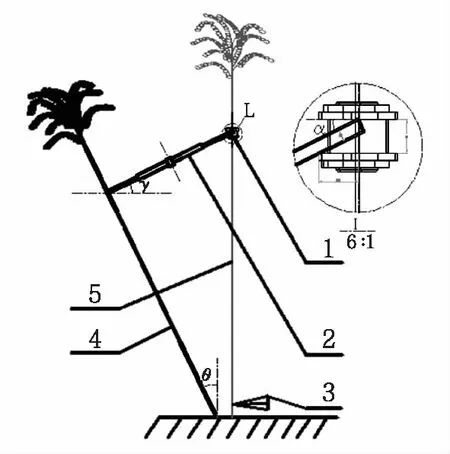
1-链条;2-拨禾星轮;3-割刀;4-倾斜植株;5-拨正后植株
式中:α— 拨指与链条的夹角;
d—链条宽度;
B1—链条高度;
B2—拨指厚度。
代入d,B1,B2,求出α=28°,如图5,因为θ=γ=α=28°,所以能收获植株倾斜角为0°~28°。
1.3 分禾器
如图1中标号2部件所示,分禾器以薄板制作,割台左右各一个,分禾器把收割机正前方即将收割的水稻与暂不收割的部分隔开,并将收割部分聚集起来导入拨禾星轮与输送装置之间,使割刀能够顺利把秸秆从合适位置割断。
1.4 禾杆输送装置
这里的禾杆输送装置(图1标号3)[3]由链条和固定在链条上的拨指完成其功能,不断运转的禾杆输送装置,带动拨禾星轮的转动,同时将被割断的水稻植株传输给脱粒部件。
1.5 高度调节装置
割台(图1标号4)的高度能够在一定范围内调节,就可以收割不同高度的水稻,如图7所示,改进后的高度调节装置使用电动推杆作为调节动力,以平行四边形机构保证割台的与地面的平行,这样能保证割台与脱粒部件的交接,不影响秸秆向脱粒滚筒的输送。
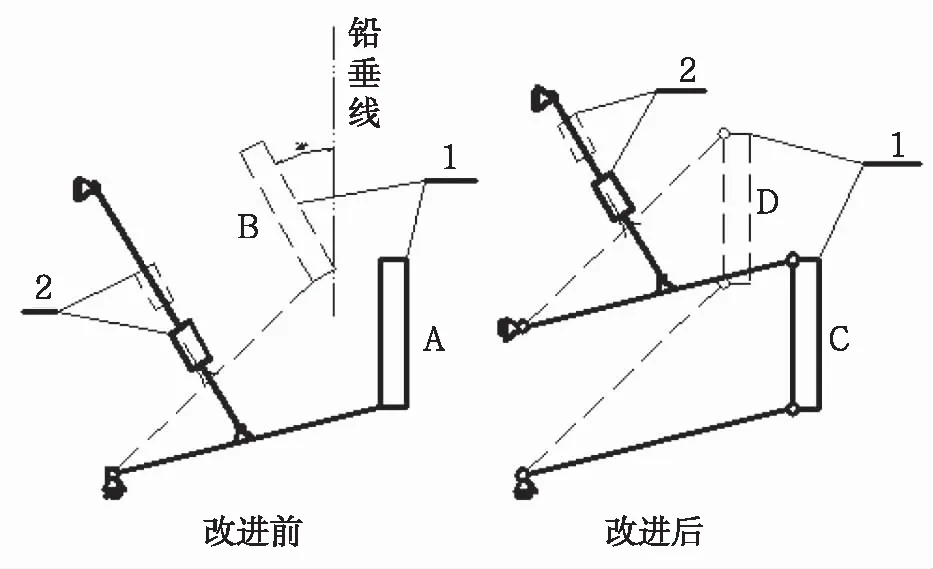
1-割台;2-电动推杆
1.6 割刀
这里使用往复式切割的割刀(图1标号5),即动刀片相对于定刀片快速往复运动,以切断秸秆。这里使割刀正常收割时切割速率为1.3 m/s左右,经试验,切割效果良好。
2 总结
在经过数次的设计研究和样机试制[4]后,改进后的割台不仅结构更精简、体型更小、重量更轻,也将使收割机拥有更优秀的收割性能,这将使小型半喂入水稻联合收割机向市场化迈进新的一步。
【REFERENCES】
[1] 肖龙祥,尹健,潘远香,等.轮距可调电驱式半喂入水稻联合收割机驱动底盘的静动态特性分析[J].机械设计与制造,2016(3):182-185.
XIAO L X,YIN J,PAN Y X,et al.The static and dynamic analysis of driver chassis of electric drive semi-feeding rice combine harvester with adjustable wheel distance[J].Machinery Design & Manufacture,2016(3):182-185.
[2] 华南农学院农机教研室.水稻联合收割机原理与设计[M].北京:中国农业机械出社,1981:52-57.
[3] 朱秉兰.简明农机手册:第二版[M].郑州:河南科学技术出版社,2001:594-605.
[4] 尹健,陈兰,黄年月,等.轮距可调的电驱式小型半喂入水稻联合收割机设计[J].农机化研究,2016(3):129-133.
YIN J,CHEN L,HUANG N Y,et al.Design of an electrical driven semi-feeding rice combine harvester with adjustable wheel distance device[J].Journal of Agricultural Mechanization Research,2016(3):129-133.
Design of a simple header for the small semi-feed combine harvester
XIAO Long,YIN Jian▲,KONG Duoduo,ZHANG Kui,WANG Zeyu
(SchoolofMechanicalEngineering,GuizhouUniversity,Guiyang550025,China)
The header is one of the most important components of a harvester,and it is the key to the performance of the harvester.We designed a simple header with a single star wheel to draw in the rice,and a parallelogram structure to ensure the header parallel to the ground before and after the height adjustment.In this paper,we elaborated on the size parameters,the contour curve and the slant angle of the star wheel.
header,star wheel,rice,harvester
S
A
2016-08-25;
2016-09-05
肖 龙(1989-),男,在读硕士,研究方向:机械设计及理论。
▲通讯作者:尹 健(1962-),男,教授,研究方向:现代设计方法。
