某型无人机机载任务管理计算机设计
2016-12-19皮祖成王诚陈文
皮祖成,王诚,陈文
(中国航天空气动力技术研究院 特种飞行器总体设计部,北京 100074)
某型无人机机载任务管理计算机设计
皮祖成,王诚,陈文
(中国航天空气动力技术研究院 特种飞行器总体设计部,北京 100074)
某型无人机系统具有多挂载能力,能同时挂载多种任务载荷。为了统一管理和综合使用多个任务载荷,通过分析机载任务设备接口的类型和通信需求,设计一种具有接入现有设备能力的任务管理计算机。该机采用成熟的插卡式集成设计方式,具备较好的使用灵活性和功能扩展能力。通过该任务管理计算机可实现对任务载荷设备的控制,对遥控、遥测、载机状态数据的管理,以及授时同步功能。任务管理计算机对任务载荷设备的综合管理,能够提高无人机任务载荷的集成能力,减少了任务载荷与载机平台之间的交联关系,使任务载荷系统更加独立,降低了任务载荷系统对飞行平台安全的影响。
任务管理计算机;任务载荷;无人机;授时同步
0 引 言
中空长航时无人机系统具有飞行高度较高、载荷能力强、航程大等优点,可执行长时间的侦察和监视任务,同时可挂载精确制导弹药对地面固定和低速移动目标进行实时打击[1]。中空长航时察打一体无人机可同时挂载光电侦察平台、合成孔径雷达、船舶自动识别系统、综合防撞系统和制导武器等多种任务载荷,根据不同的飞行任务需求,还可将合成孔径雷达或光电侦察平台换装为航空相机或电子战设备。为了统一管理无人机上的各种任务载荷,使它们协同工作,从而让无人机更高效地执行各项任务[2],需要设计专门用于任务载荷管理的任务管理计算机,简称任管机。
国外,已对任务管理进行了诸多研究[3-5],尤其是对任务管理的系统架构、任务管理相关的航空电子设备构型和任务管理软件层次结构等进行了较为深入的研究。国内,针对长航时无人机和小型无人机的飞行器管理计算机也进行了设计研究[6-10],但多数设计均将飞行控制和任务管理集中于一台计算机,当任务管理工作量较大时需占用较大的计算机资源,且飞行控制逻辑和任务管理逻辑相互耦合,使飞控计算机的软件复杂度大幅增加,对飞行安全造成影响。何成军等[11]、邢联大等[12]、朱峰等[13]和陈福等[14]分别对管理计算机的嵌入式系统软件进行了分析研究,提出了高效可靠的软件架构,并使用VxWorks操作系统,通过任务划分和状态机等技术提高了软件系统的可靠性和安全性。王向军等[15]基于GPS时钟和实时时钟研究了时间同步授时,取得了较好效果。
本文针对中空长航时无人机,通过分析其机载任务设备接口的类型和通信需求,设计一种用于任务载荷管理的任务管理计算机,该机采用插卡式集成设计方式,可接入所有的任务载荷设备,并由其集中管理。
1 功能架构
任管机作为任务载荷与载机平台、数据链路交联的中枢设备,其交联关系如图 1所示。
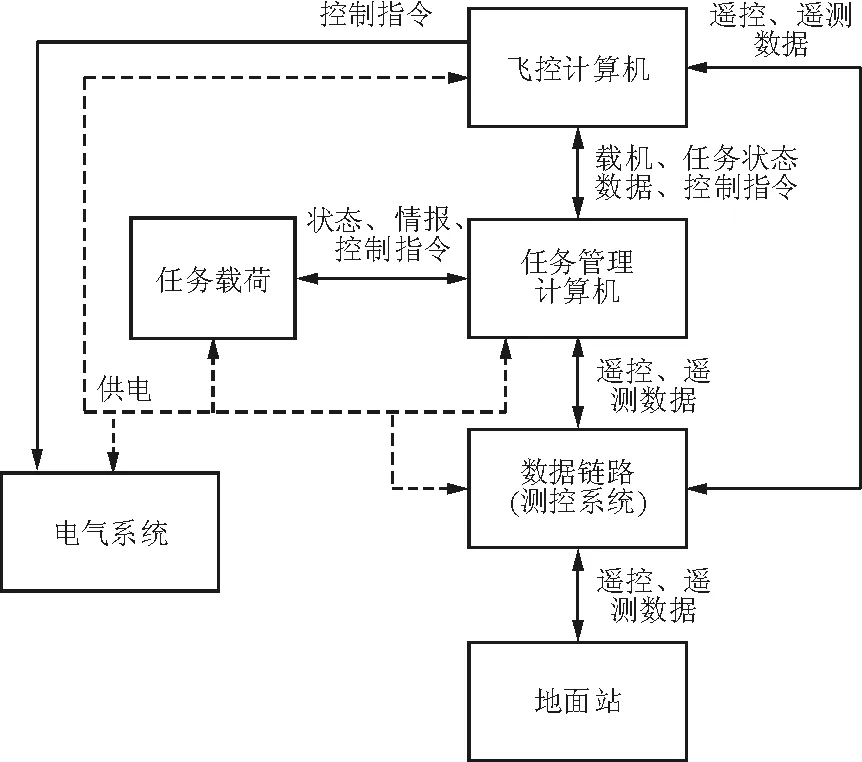
图1 任务管理计算机与外部设备的交联关系
任管机从飞控计算机实时获取飞机的状态信息,并向飞控计算机发送任务载荷通电/断电等控制指令,同时为飞控计算机提供在轨弹药数目等任务设备的状态信息。任管机通过数据链路实现与地面站之间的遥控和遥测过程。任管机可以选择是否对遥控指令进行解析,并将遥控数据发送给任务载荷;任务载荷的所有状态数据、侦察情报等信息也直接传输到任管机中,任管机对上述信息进行汇总,并以任务状态数据和遥测数据的形式分别提供给飞控计算机和数据链路。本文从硬件和软件两方面对任管机进行设计。硬件主要提供足够的运算能力和外部接口能力;软件主要完成各种具体功能的实现,管理各种状态数据并控制数据流。
2 硬件设计
为了使硬件平台具有灵活性和可靠性,任管机的硬件设计采用插卡式架构。任管机中的设计主控板卡用于管理其他资源并完成主控运算功能,主控板卡采用基于PowerPC架构的CPU,配置256 MB内存和128 MB的Flash存储空间,在主控板卡中运行VxWorks操作系统。任管机的各种接口功能被分别设计为独立的功能板卡,各个功能板卡与主控板卡之间通过背板ISA总线进行通信。载机供电直接输入到电源板卡中,经电源板卡变换后的电源通过背板上的电源走线向所有板卡供电。任管机硬件结构如图 2所示。
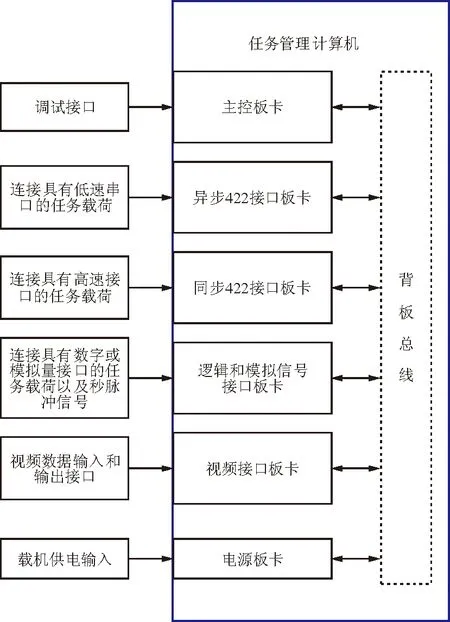
图2 任务管理计算机硬件结构
任管机中包含四类功能板卡:异步422接口板卡、同步422接口板卡、逻辑和模拟信号接口板卡和视频接口板卡。异步422接口板卡和同步422接口板卡均采用基于FPGA芯片为核心的硬件架构。异步422接口板卡用于传输控制指令和状态信息数据。同步422接口板卡用于传输图像等需要占用较大带宽的数据。逻辑和模拟信号接口板卡主要包含DI、DO和AI、AO接口电路,主要由数字逻辑芯片和A/D芯片组成,可输入/输出28和5 V电平信号的数字量,同时可对±10、±5 V的模拟量进行数字化采样,该功能板卡用于连接具有数字或模拟量接口的任务载荷,也用于秒脉冲信号的输入。视频接口板卡主要用于多路视频信号的路由选择功能,在板卡上设计6路视频输入和4路视频输出接口,输入和输出接口均采用HD-SDI视频接口作为标准,采用HD-SDI接口芯片和阻抗匹配电路。输入信号和输出信号之间采用高速差分信号矩阵开关(如图 3所示),通过该矩阵开关可实现“输出_N”(N=1~4)信号从“输入_M”信号中(M=1~6)任意选择的功能。输出的视频信号可通过数据链路发送到无人机地面站,也可提供给机载视频存储仪等其他设备使用。

图3 视频矩阵开关
3 软件设计
从任管机需要完成的功能软件层面来分析,软件需要完成三种任务:数据管理、设备控制和授时同步。
3.1 遥控数据管理
遥控数据均来源于地面站通过数据链路向任务载荷(包括任管机)发送的各种控制数据。由于存在多个任务载荷,需要对不同载荷的遥控数据进行区分。通过在遥控数据帧中增加目标设备的识别号进行判断,遥控数据帧结构如图4所示。设备ID号由一个字节表示,可区分256种载荷设备,针对任管机遥控数据的设备ID为0x00。

图4 遥控数据帧结构
Fig.4 Telemetry frame content
遥控数据处理流程如图5所示。将遥控数据分为两类,一类为地面站给任管机发送的遥控指令,该类指令用来实现对任管机内部功能状态的控制;另一类为地面站给任务载荷设备发送的遥控指令,该类指令在到达任管机后需由任管机转发到对应的任务载荷设备。不同的任务载荷设备分别接入到任管机上的不同通信接口,每个接口有唯一的通信地址,故任管机只需将设备ID号与设备通信地址进行绑定就可完成遥控指令的转发。为了简化程序运行过程,建立设备ID号与目标任务载荷通信地址的映射表,如表1所示。任管机可将该表存储在设备内存中,通过维护该表的内容,可以灵活地配置任务载荷接口的集成方式。
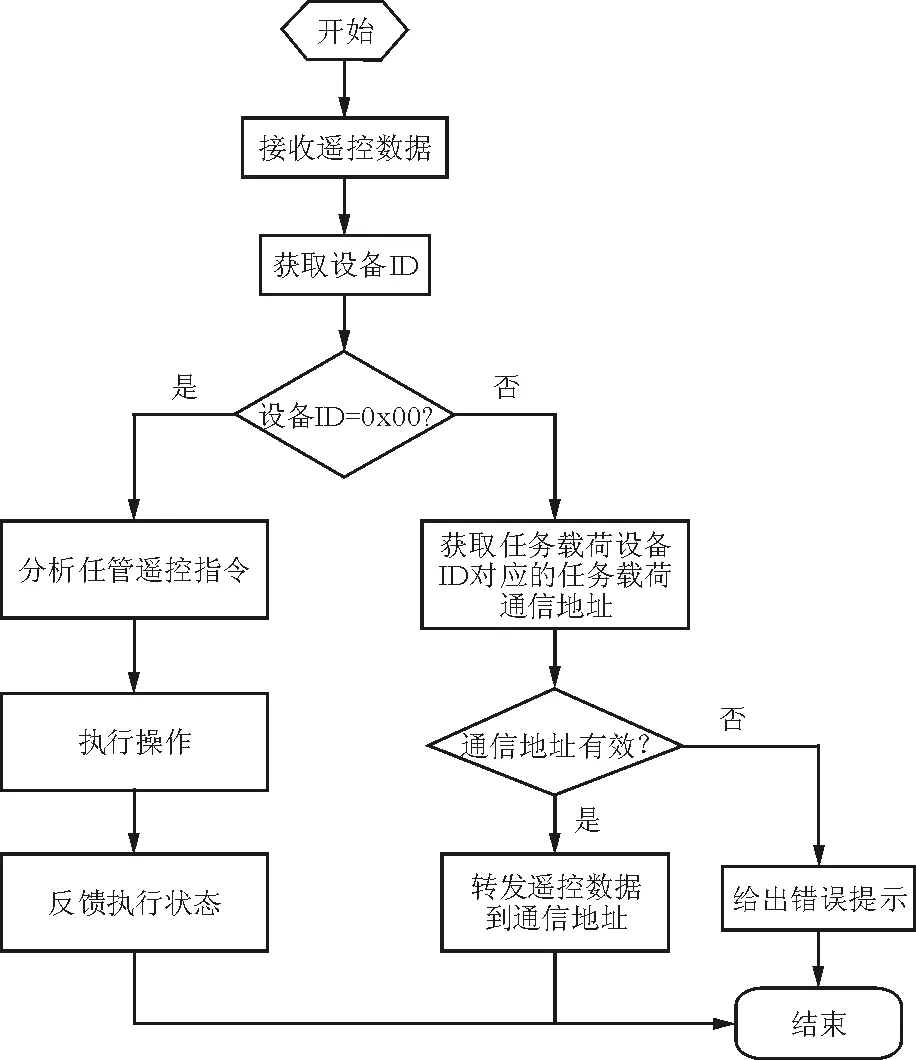
图5 遥控数据处理流程
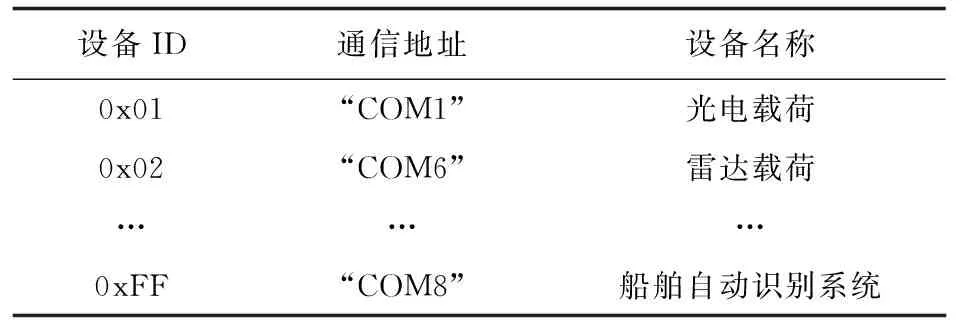
设备ID通信地址设备名称0x01“COM1”光电载荷0x02“COM6”雷达载荷………0xFF“COM8”船舶自动识别系统
3.2 遥测数据管理
遥测数据来源于多个任务载荷设备,大部分遥测数据为任务载荷所探测、收集到的侦察数据,也包含一小部分任务载荷的工作状态数据。任务载荷产生的遥测数据根据带宽占用情况分为两类:一类是占用带宽大的图像和视频数据,另一类是占用带宽小的其他数据。任管机对这两种类型的数据分别进行管理。
3.2.1 图像和视频数据的遥测
由于数据链路带宽的限制,无法将任务载荷所有占用带宽大的数据同时传给地面站,任管机将占用带宽大的数据直接传输给由数据链路提供的图像接口和同步422接口等带宽较大的数据接口,以实现大带宽数据的传输。数据切换功能由硬件来完成,故在任管机软件中设计对应的控制接口即可,切换模式采用SwitchToDL函数完成图像、视频数据的遥测切换,如图6所示。

图6 占用带宽大的数据切换模式
3.2.2 其他数据遥测
用于传输遥测数据的数据链路,其带宽为固定值,而不同无人机装配的任务载荷设备各异,遥测数据所占用的带宽也因无人机配型的不同而不同。为了管理各任务载荷设备对遥测带宽的占用,任管机采用基于任务载荷设备优先级的遥测管理方法。根据任务载荷设备在使用过程中的重要程度将其划分优先级,首先满足优先级高的任务载荷设备的遥测需求,然后发送优先级低的任务载荷设备的遥测数据,其处理流程如图7所示。
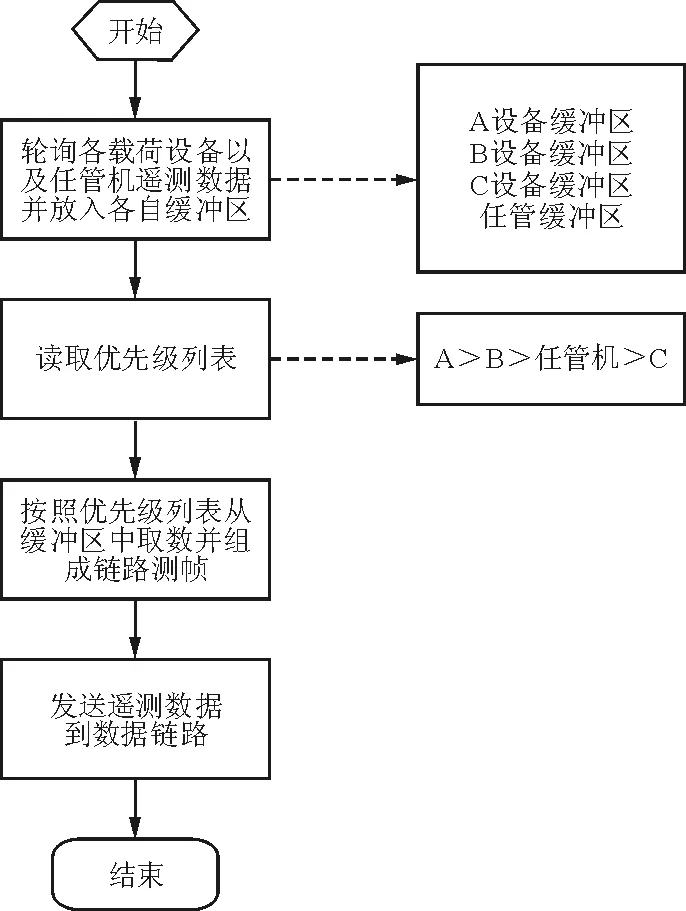
图7 遥测数据处理流程
在总带宽不够用的情况下,应先丢弃优先级低的任务载荷的遥测数据。遥测缓冲类如图8所示,使用字节类型的数组“buffer”作为数据缓冲区,为了减少数据操作的时间,将其设计为环形缓冲区;使用帧定位数组“FrameArray”来定位缓冲区内每个完整帧的头尾位置,通过该数组可以快速地定位一帧数据在缓冲区中的位置,便于对完整一帧数据进行操作。当缓冲区满时,可通过IsLoss标识设置是否丢弃旧数据。用户程序通过InBuffer和OutBuffer接口对该缓冲区对象进行操作,用于存入和取出缓冲区内容。

图8 遥测缓冲类
3.3 载机状态数据管理
载机状态数据包含载机的姿态、位置、时间等信息,任管机通过与载机的接口获取这些信息,同时,任管机通过与各任务载荷设备的接口获取载荷状态数据。由于有多个任务载荷需要使用载机信息,需要建立载机信息共享数据存储区域,共享方式如图9所示。为了保持共享数据的完整性,还需要建立用于读取和写入数据的互斥机制。
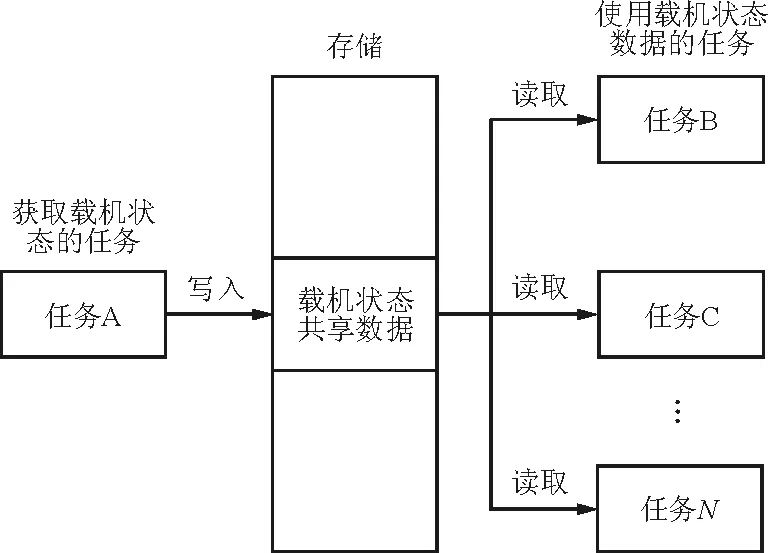
图9 载机状态数据共享方式
3.4 设备控制
由地面站发送到任管机的遥控数据中包含两类控制数据:一类用于对任管机外围任务载荷进行控制,另一类用于对任管机的各功能模块进行控制。任管机对外围任务载荷的控制主要通过转发地面站对任务载荷的遥控指令来实现,需要地面人员对遥测数据进行观察来完成对命令执行效果的评判。对任管机各功能模块的控制也通过地面站对任管机的遥控指令来实现,任管机接收遥控指令的软件流程如图5所示,对各功能模块的控制执行流程如图10所示。
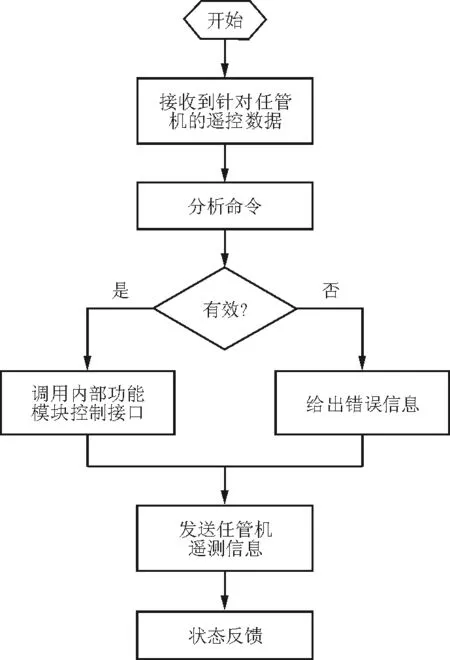
图10 对任管机各功能模块的控制
3.5 授时同步
3.5.1 不带秒脉冲的授时
授时同步分为带秒脉冲信号的精确同步和不带秒脉冲信号的一般同步。对于不带秒脉冲的一般授时同步,采取在通信口发送特殊的对时机制来实现,如图11所示。由B设备向A设备(任管机)发送对时请求,此时B设备记录发送时刻TB0,A设备收到B设备的对时请求时,A设备记录接收到该请求的时刻TA0,再由A设备向B设备发送当前时刻TA1和TA0,B设备在TB1时刻接收到TA1和TA0数据,此时B设备按照公式(1)进行时钟校准。
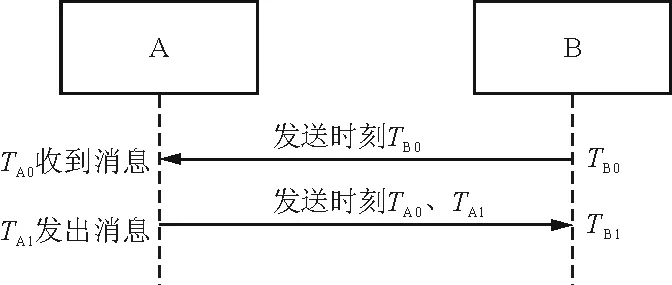
图11 B设备向A设备请求准确时间
(1)
某些情况下需要由A设备(任管机)发起对时指令,此时由A设备向B设备发出对时指令,B设备按照如图11所示的方式进行对时即可,此时授时同步的流程如图12所示。为了使授时更精确,A、B设备在发送和接收消息时需尽快处理时间信息,中间应尽量减少因系统中断而带来的干扰。

图12 由A设备启动的对B设备的授时
3.5.2 带秒脉冲的授时
在需要高精度授时的情况下,采用带秒脉冲信号的授时机制。时钟源设备每秒发出一个脉冲信号,该脉冲信号的上升沿与时钟信息高精度对齐,由此可对其他设备进行高精度授时。A设备(任管机)向B设备发送启动授时指令,B设备收到后向A设备发送请求授时申请,A设备收到该申请后,在紧接着的一个秒脉冲发生后立刻向B设备发送当产生前秒脉冲时的时刻TA0,B设备收到该时刻后在下一个接收到秒脉冲的时刻将B的系统时间设置为T=TA0+1,完成授时过程,如图13所示。

图13 秒脉冲授时
4 结 论
(1) 本文设计的任务管理计算机具有接入现有设备的能力,由任务载荷设备和任管机所组成的任务载荷系统对载机、数据链路等系统的所有接口通过任管机提供。任管机具备以下功能:①管理任务载荷的遥测和遥控数据;②监控任务载荷状态;③实现多路视频的接入和分配;④对任务载荷授时同步;⑤提供与其他系统的接口。实践表明,该任务管理计算机具有较好的使用灵活性和功能扩展能力。
(2) 任管机作为中空长航时无人机系统中管理任务载荷的核心设备,它可以将任务载荷设备从无人机平台系统中分离出来,使无人机平台专注于对飞行平台性能的控制,而不受任务载荷系统过多的影响。任管机对任务载荷设备的综合管理,能够提高任务载荷的集成能力;同时,载荷设备之间的协同应用也可在此基础上开展,为载荷应用水平的提升奠定了硬件和软件架构基础。
[1] 兰文博, 刘凯, 汪洋. 中空长航时无人机防区外对地攻击作战体系研究[J]. 飞航导弹, 2015(12): 30-33. Lan Wenbo, Liu Kai, Wang Yang. Research on air-to-ground attacking system of long-endurance UAV[J]. Aerodynamic Missile Journal, 2015(12): 30-33.(in Chinese)
[2] 汤一峰. 无人机自主协同任务管理[J]. 航空电子技术, 2013(1): 54-56. Tang Yifeng. Autonomous collaborative task management of UAV[J]. Avionics Technology, 2013(1): 54-56.(in Chinese)
[3] Eduard Santamaria, Pablo Royo, Cristina Barrado, et al. An integrated mission management system for UAS civil applications[C]. AIAA-2009-6294, 2009.
[4] Randy Black, Mitch Fletcher, Haowei Bai, et al. Applying Orion avionics architectural principles to space robotics[C]. AIAA-2007-6267, 2007.
[5] Pablo Royo, Juan Lopez, Cristina Barrado, et al. Service abstraction layer for UAV flexible application development[C]. AIAA-2008-484, 2008.
[6] 徐奡, 郑毓琦. 长航时无人机飞行器管理计算机设计研究[J]. 航空计算技术, 2008, 38(4): 114-117. Xu Ao, Zheng Yuqi. Redundant vehicle management computer for high altitude long endurance unmanned aerial vehicle[J]. Aeronautical Computing Technique, 2008, 38(4): 114-117.(in Chinese)
[7] 於二军, 吴斌, 李林, 等. 机载机电管理计算机双余度设计[J]. 微电子学与计算机, 2012, 29(12): 88-90. Yu Erjun, Wu Bin, Li Lin, et al. Design of dual redundancy utility management computer[J]. Microelectronics and Computer, 2012, 29(12): 88-90.(in Chinese)
[8] 王少云. 某型机载任务管理系统的设计[J]. 无线电通信技术, 1998(2): 59-61. Wang Shaoyun. Design of an airborne task management system[J]. Radio Communications Technology, 1998(2): 59-61.(in Chinese)
[9] 陈国, 边庆, 范超. 一种新型无人机小型化飞行器管理计算机的设计实现[J]. 电子技术与软件工程, 2014(14): 185-186. Chen Guo, Bian Qing, Fan Chao. Design and implementation of a new type of UAV miniaturization aircraft management computer[J]. Electronic Technology and Software Engineering, 2014(14): 185-186.(in Chinese)
[10] 谭雁英, 赵荣椿, 祝小平, 等. 基于智能Agent的小型无人机自主飞行任务管理器的设计[J]. 西北工业大学学报, 2006, 24(6): 754-758. Tan Yanying, Zhao Rongchun, Zhu Xiaoping, et al. Intelligent Agent-based design and implementation of autonomous task manager for small UAVs[J]. Journal of Northwestern Polytechnical University, 2006, 24(6): 754-758.(in Chinese)
[11] 何成军, 郑旭洲. 综合空气管理计算机软件设计[J]. 飞机工程, 2011, 4: 13-15. He Chengjun, Zheng Xuzhou. Software design of integration air management[J]. Aircraft Engineering, 2011, 4: 13-15.(in Chinese)
[12] 邢联大, 苏振华, 付雷, 等. 基于VxWorks的SAR信号处理的实现[J]. 电子科技, 2015, 28(6): 150-154. Xing Lianda, Su Zhenhua, Fu Lei, et al. Realization of SAR imaging signal processing based on VxWorks[J]. Electronic Science and Technology, 2015, 28(6): 150-154.(in Chinese)
[13] 朱峰, 周吉超, 赵起超. 一种基于VxWorks的导弹火控系统软件实时多任务设计方法[J]. 数字技术与应用, 2015(3): 127-128. Zhu Feng, Zhou Jichao, Zhao Qichao. A real-time multitask design method for missile fire control system software based on VxWorks[J]. Digital Technology and Application, 2015(3): 127-128.(in Chinese)
[14] 陈福, 张晓红, 赵刚, 等. 飞机机电综合管理平台应用任务调度方法研究[J]. 计算机测量与控制, 2016, 24(3): 255-257. Chen Fu, Zhang Xiaohong, Zhao Gang, et al. Research on application task scheduling method for aircraft electro-mechanical integrated management platform[J]. Computer Measurement and Control, 2016, 24(3): 255-257.(in Chinese)
[15] 王向军, 张亚元, 张龙祥. 基于GPS和高精度实时时钟的时间同步方法[J]. 纳米技术与精密工程, 2016, 14(1): 66-70. Wang Xiangjun, Zhang Yayuan, Zhang Longxiang. Time synchronization based on GPS and high-accuracy real-time clock[J]. Nanotechnology and Precision Engineering, 2016, 14(1): 66-70.(in Chinese)
(编辑:马文静)
The Design of Mission Management Computer for a Certain UAV
Pi Zucheng, Wang Cheng, Chen Wen
(Special Aerial Vehicle Design Institute, China Academy of Aerospace Aerodynamics, Beijing 100074, China)
A certain UAV can mount kinds of payloads at the same time. A kind of mission management computer(MMC) is introduced to manage and make full use of those payloads. By analyzing the interface types and communication requirements of the existing on-board mission equipment, a task management computer with the capability of accessing existing equipment is designed. The computer adopts mature plug-in integrated design mode, and is of better flexibility and function expandability. All the payloads are controlled by MMC. Telemetry and telecontrol data message of the payloads is managed by MMC. The MMC provide synchronization timing service for external devices. Payload integration capabilities can be improved by designing the MMC, and achieve independence to run the task system and flight control system. Thus the safety of the UAV platform can be improved.
mission management computer(MMC); payload; UAV; synchronization timing
2016-09-27;
2016-10-26
陈文,392117912@qq.com
1674-8190(2016)04-464-07
V247.1;V279
A
10.16615/j.cnki.1674-8190.2016.04.011
皮祖成(1985-),男,硕士,工程师。主要研究方向:无人机载荷应用和任务管理。
王 诚(1981-),男,硕士,高级工程师。主要研究方向:无人机指控系统设计、无人机载荷应用。
陈 文(1986-),男,硕士,工程师。主要研究方向:无人机载荷应用、控制软件设计。
