不同驾驶员响应特性下的前碰撞预警安全收益分析*
2016-12-17陈名扬朱西产马志雄陆依倩江丽君
陈名扬朱西产马志雄陆依倩江丽君
(1.同济大学,上海 201804;2.上海汽车集团股份有限公司技术中心,上海 201804)
不同驾驶员响应特性下的前碰撞预警安全收益分析*
陈名扬1朱西产1马志雄1陆依倩1江丽君2
(1.同济大学,上海 201804;2.上海汽车集团股份有限公司技术中心,上海 201804)
利用驾驶模拟器测试研究了追尾危险工况下驾驶员的避撞行为。采用事故发生率作为安全收益评价指标,利用二元Logistic回归方法分析了驾驶员分心与否、避撞方式、反应时间及避撞操作力度等参数对前碰撞预警安全收益的影响。结果表明,驾驶员分心与否显著影响事故发生率,前碰撞预警算法有必要考虑驾驶员的注意力状态,保证驾驶员反应时间小于2.0 s,以降低事故发生的可能性。
主题词:前碰撞预警 安全收益 驾驶员行为
1 前言
据统计,中国所有高速公路交通事故中,34.29%为追尾碰撞[1~3]。前碰撞预警系统(Forward Collision Warning,FCW)是针对追尾危险工况开发的先进驾驶辅助系统,但前碰撞预警算法主要基于安全距离和安全时间逻辑算法[4,5],未考虑驾驶员的状态,而驾驶员在驾驶过程中很有可能因查看手机及车辆中控屏的信息而分心,这种现象会延误或妨碍驾驶员反应而导致交通事故[6],因此研究驾驶员注意力不集中状态下的FCW安全收益非常关键。
与自然驾驶研究(Naturalistic Driving Study,NDS)及实车路试(Field Operational Test,FOT)相比,驾驶模拟器测试具有工况可重复性好、试验效率高、试验危险性低等优点[7],且以事故发生率作为安全收益评价指标时,驾驶模拟器测试是较合理的试验方法。本文利用搭建的驾驶模拟器测试研究了特定追尾危险工况下驾驶员的避撞行为,给出了驾驶员反应时间、避撞方式及驾驶员避撞操作力度等参数的统计特性值,并利用二元Logistic回归方法分析了各参数对FCW安全收益的影响。
2 驾驶模拟器测试
2.1 驾驶模拟器搭建
搭建了一个简易的固定式驾驶模拟器,如图1所示。其中,罗技G27套件(包含转向盘、油门、制动和离合器踏板)、赛车游戏座椅安装于铝型材框架上,驾驶员可根据自身条件调节座椅至舒适位置。投影仪将虚拟场景投影到驾驶员正前方的屏幕上,两个摄像头分别记录驾驶员的视线变化及踏板运动,一块液晶显示屏被安装于中控台位置处,用于辅助驾驶员完成次要任务。次要任务为读数任务,系统会发出声音提示驾驶员开始读数,同时在中控液晶显示屏上依次随机显示5个数字(0~9的整数),每个数字显示时间为0.3 s,间隔0.2 s,共持续2.3 s。当本车与前车的TTC(Time To Collision)值小于阈值时,FCW通过声音和视觉两种方式同时报警,音响置于座椅旁,LED灯安装在转向盘前方,报警时亮红灯。

图1 固定式驾驶模拟器
2.2 测试场景设计
图2为危险场景示意图,其中SV代表本车,POV代表目标车辆。本车在右侧车道行驶,车速保持在90 km/h左右[8]。当本车达到稳定车速v1时,左侧车道上原本在本车后方的目标车以车速v2超过本车,当与本车纵向距离达到dcut-in时在2 s切入本车车道,并保持车速v2前进。当两车纵向距离达到dbrake时,目标车以恒定减速度a1减速至车速v3。随后以恒定加速度a2加速远离本车,直至消失在视野中。如果两车发生碰撞,虚拟场景变成破碎的风挡玻璃图案,1.5 s后车辆重新置于右侧车道中心,驾驶员操作车辆从静止起步继续测试。以上各参数的含义及参数值设定见表1。

图2 危险场景示意
共设置了4段危险场景,因第1次危险场景出现后,驾驶员会对危险产生预期,为了避免预期对心理的影响,在测试过程中,各危险场景之间均设置了若干段干扰场景。干扰场景的基本设置与危险场景相同,只是当两车纵向距离达到dbrake时目标车不制动,而是维持原车速v2驶离。干扰场景中,目标车车型、颜色均为随机出现。
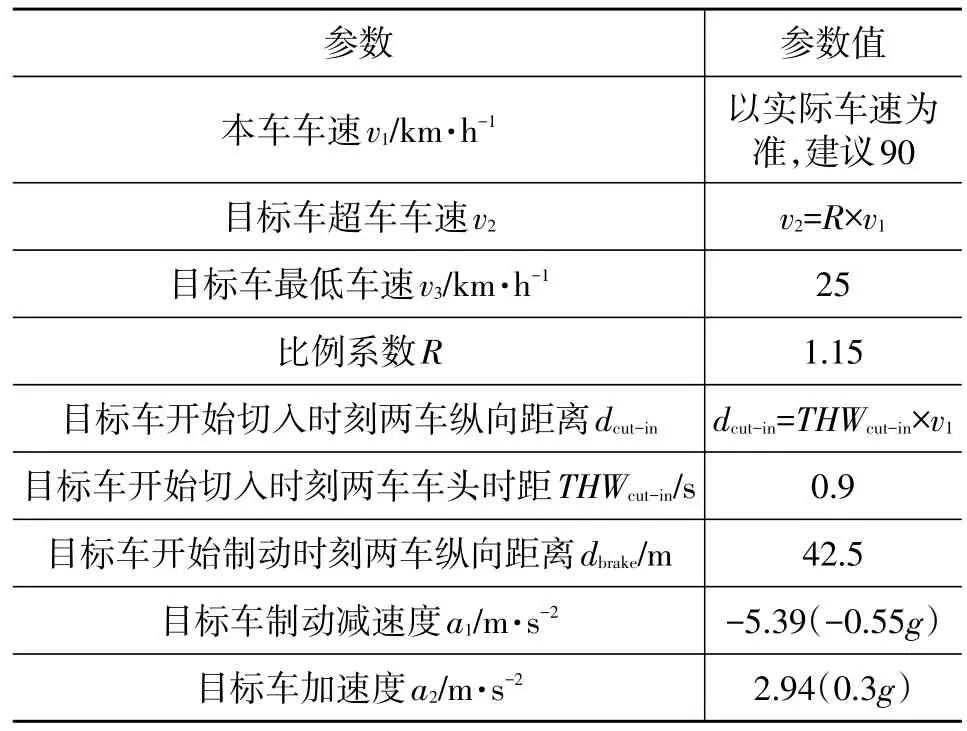
表1 危险场景各参数含义及参数值设定
在危险场景和干扰场景外还穿插若干普通场景,用于模拟一般交通环境。在普通场景中,不设置超车后切入本车车道的车辆,而按中等交通流量随机设置一定数目的车辆行驶于左侧车道,这些车辆均以高于本车车速直线行驶,不与本车产生冲突。
2.3 受试者及测试流程
本次测试参与者共32人,其中女性5人,男性27人。所有受试者均为已取得驾照且身体健康、驾驶状态良好的非职业驾驶员,平均年龄为34.9岁,平均驾龄为7.3年。
正式测试开始前,受试者会利用驾驶模拟器在普通场景上试驾一段时间用于熟悉测试环境。正式测试时,所有受试者均需完成两组对照测试,一组测试中驾驶员需完成次要任务,另一组则不需要。图3为驾驶模拟器测试现场,视频记录了FCW报警后受试者的紧急制动行为。为了保证次要任务导致的分心效果,受试者在测试前会被告知测试时需统计其正确读数的个数。

图3 驾驶模拟器测试现场
3 追尾危险工况下驾驶员的响应特性
驾驶员对追尾危险的不同响应主要在于注意力集中与否、不同的避撞方式、反应时间的长短、不同的避撞操作(制动、转向)力度等。
3.1 驾驶员注意力
基于驾驶模拟器共测试采集到了220例有效样本,驾驶员注意力集中组有107例,驾驶员注意力分散组(需完成次要任务)有113例。
3.2 避撞方式
结合视频以及驾驶模拟器采集的车辆运动学和动力学数据,对驾驶员在追尾危险工况下的避撞方式进行分类统计,驾驶员未采取避撞措施的有4例样本。驾驶员的避撞方式主要分为仅制动(55%)、仅转向(17%)和转向+制动(26%)等3类,共计216例。
3.3 驾驶员反应时间
驾驶员制动反应时间定义为危险产生到驾驶员开始制动的时间。将危险产生时刻定义为前车开始制动时刻,即前车车速开始急剧降低的时刻。根据驾驶模拟器输出的车辆踏板位置参数确定驾驶员的开始制动时刻,即将驾驶员开始制动的时刻定义为制动踏板位置参数开始产生变化的时刻。
驾驶员转向反应时间定义为危险产生(前车开始制动时刻)到驾驶员开始转向的时间。驾驶员向左转向避撞过程包括4个时刻点,即危险产生时刻t1、转向开始时刻t2,驾驶员左打转向盘角度最大时刻t3,驾驶员右打转向盘角度最大时刻t4。图4为某转向避撞样本的转向盘转角曲线(向左转向转向盘转角为正,向右转向转向盘转角为负)。根据Benderius的研究[9]确定驾驶员转向开始时刻:当转向盘转角小于-20°后达到第1个局部极小值的时刻定义为t4时刻,t1和t4时刻之间转向盘角度最大的时刻定义为t3时刻,t3时刻之前第1次出现转向盘角度小于8°的时刻为t2时刻。按照上述方法可确定实际转向过程中驾驶员转向开始时刻,进而确定驾驶员转向反应时间。
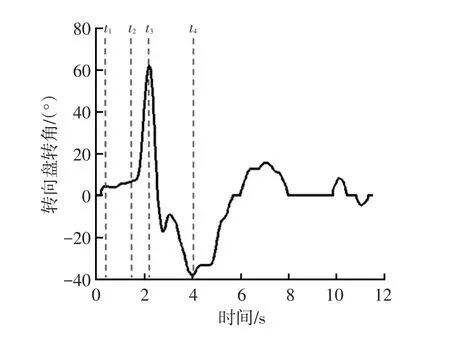
图4 某转向避撞样本的转向盘转角曲线
当驾驶员采取制动+转向的避撞方式时,驾驶员反应时间为制动反应时间和转向反应时间的最小值。
216例追尾危险工况下的驾驶员反应时间统计特征值如表2所示。根据四分位数,将驾驶员反应时间划分为小于1.0 s、1.0~1.4 s、1.4~2.0 s以及大于2.0 s 4个等级。
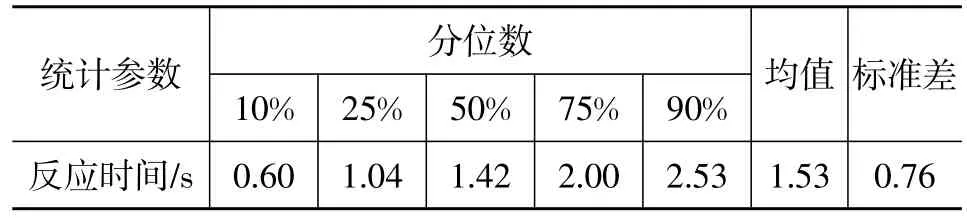
表2 驾驶员反应时间统计特征值
3.4 驾驶员避撞操作力度
驾驶员避撞操作力度指驾驶员避撞行为的操作剧烈程度,驾驶员的避撞行为包括制动避撞和转向避撞,因无法用相同的参数来表征两种方式的驾驶员操作力度,故需分别定义制动避撞(178例)和转向避撞(95例)的操作力度。制动操作力度通过最大制动减速度和最大制动减速度梯度来表征,制动减速度梯度反映了制动速度的快慢;转向操作力度则通过最大转向盘转角和最大转向盘角速度来表征,转向盘转角反映了驾驶员转向程度,转向盘角速度则表示驾驶员转向的快慢。最大制动减速度、最大制动减速度梯度、最大转向盘转角和最大转向盘角速度的统计特征值如表3所列。
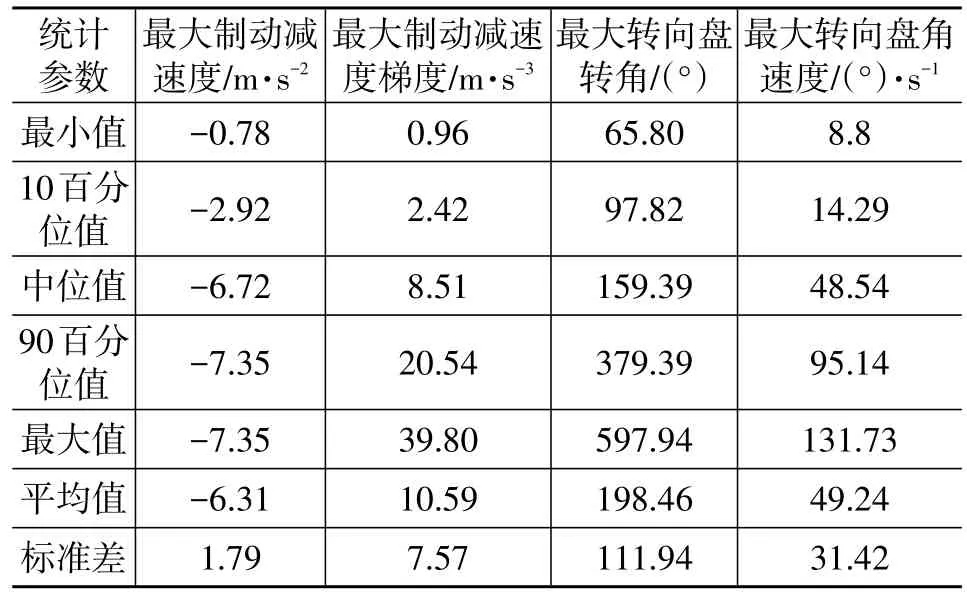
表3 避撞操作剧烈程度参数统计特性
针对178例驾驶员有制动行为的样本,以最大制动减速度和最大制动减速度梯度为变量进行k-means聚类分析,根据迭代记录,通过2次迭代后聚类中心收敛,制动响应操作非常剧烈的有8例。针对有转向行为的95例样本,以最大转向盘转角和最大转向盘角速度为变量进行k-means聚类分析,根据迭代记录,经过6次迭代后聚类中心收敛,其中,驾驶员转向响应操作非常剧烈的样本有19例。转向+制动避撞时,若制动或转向任何一种避撞方式的操作非常剧烈,则该转向+制动避撞的操作力度为非常剧烈。统计结果如表4所示。
4 安全收益分析
采用事故发生率作为追尾危险工况下驾驶员响应的安全收益评价指标。本文设计的危险场景中,左侧车道上不存在会与本车发生冲突的其它车辆,即不存在二次碰撞的情况,因此本文的事故发生率是指一次碰撞发生率。

表4 避撞操作力度统计
4.1 不同驾驶员响应特性下的事故发生率
在追尾危险工况中,不同驾驶员响应特性下的事故发生率如表5所列。驾驶员分心(完成次要任务)时的事故发生率(18.4%)是驾驶员注意力集中时(5.6%)的3倍多。3种避撞方式的事故发生率在10%~15%之间,差异不明显,其中通过转向避撞的事故发生率比制动避撞时低,3种方式都能在一定程度上避免事故的发生。当驾驶员反应时间小于1.4 s时,事故发生率较低,在3.7%左右。而当驾驶员反应时间大于2.0 s时,事故发生率提高了9倍(35%)。当驾驶员响应操作非常剧烈时,碰撞事故的发生率达到37%,远高于一般剧烈操作的事故发生率。

表5 不同驾驶员响应特性下的事故发生率
4.2 二元Logistic回归分析
事故发生率是各响应特性综合作用下的最终体现,因此在进行安全收益分析时,需综合考虑各响应特性的影响。Logistic回归模型是研究因变量为二分类或多分类观察结果与影响因素(自变量)之间关系的一种多变量分析方法[11]。这里因变量为碰撞与否,故采用二元Logistic回归分析。
建立事故发生率与驾驶员注意力、避撞方式、反应时间以及操作剧烈程度之间的回归模型:

式中,x1,x2,…,xn为驾驶员响应特性参数;b0为常数项;b1,b2,…,bn为偏回归系数;p为事故发生概率。
对自变量和因变量进行编码,如表6所列。

表6 二元Logistic回归分析变量参数编码
避撞方式与驾驶员反应时间均属于多分类变量,在进行二元Logistic回归分析时需要定义为哑变量。利用全变量进入法对变量进行回归建模,通过回归模型系数的综合检验结果表明,卡方值χ2为52.838,自由度df=7,概率p=0,模型中至少有1个自变量具有统计意义。采用统计量评价模型Hosmer-Lemeshow的拟合优度,将216个样本数据按频率分为10组,构造卡方统计量,检验观测值与预测值是否存在显著差异。Hosmer-Lemeshow统计量卡方值χ2为2.325,自由度df=7,概率p= 0.940>0.05,表明在显著水平为0.05时事故发生概率的预测值与观测值不存在显著差异,即该模型的拟合效果较好。
最终得到Logistic回归模型为:

式中,p为碰撞事故发生率;x1为注意力情况;x7为操作剧烈程度;x2、x3、x4、x5、x6为自由度。
避撞方式为多分类变量,有2个自由度(x2,x3),参照组为“仅制动”样本组,自由度x2对应“仅转向”样本组,自由度x3对应“制动+转向”样本组。驾驶员反应时间也为多分类变量,有3个自由度(x4,x5,x6),参照组为反应时间小于1.0 s的样本组,自由度x4对应反应时间在1.0~1.4 s的样本组,自由度x5对应反应时间在1.4~2.0 s的样本组,自由度x6对应反应时间大于2.0 s的样本组。
表7为二元Logistic回归的分析结果。本文利用Wald统计值检验自变量的显著性,结果表明,避撞方式对于事故发生率的影响不显著;驾驶员注意力是否集中显著影响事故发生率,分心时的事故发生率是注意力集中时的3.359倍;驾驶员响应时间显著影响事故发生率,驾驶员反应时间大于2.0 s时,发生事故的可能性为响应时间小于1.0 s时的20.919倍;驾驶员避撞操作力度显著影响事故发生率,操作非常剧烈时的事故发生率是一般剧烈时的9.364倍。
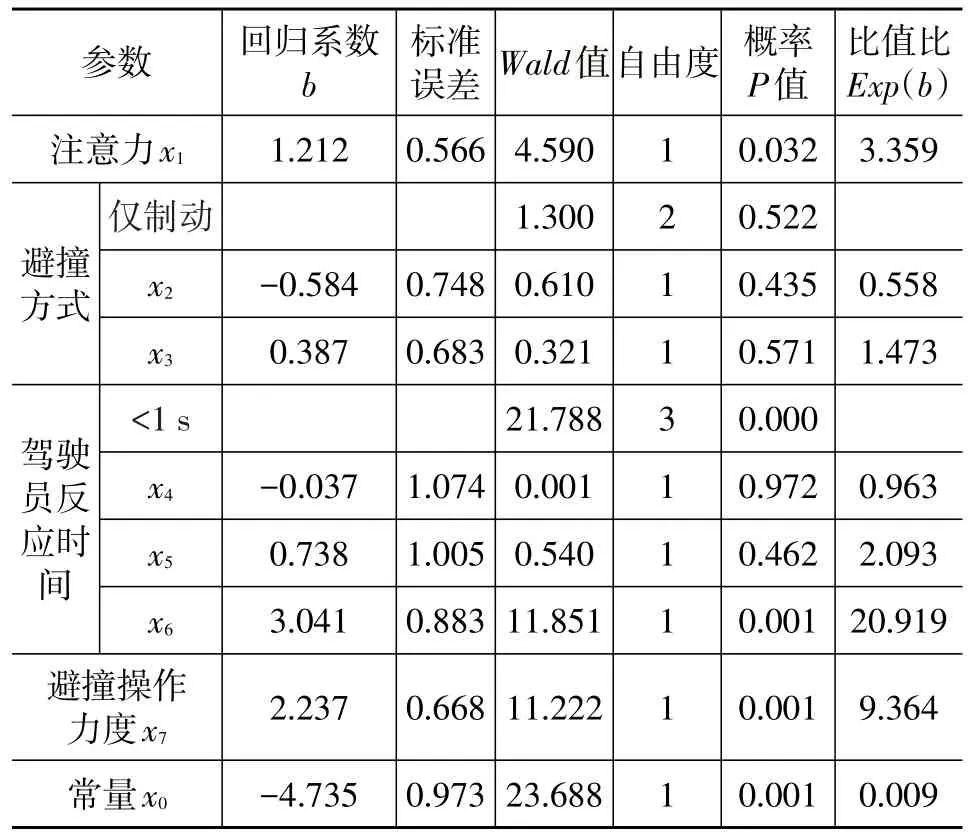
表7 二元Logistic回归分析结果
4.3 建议
由上述分析可知,驾驶员注意力是否集中显著影响FCW的安全收益,因此FCW算法除了基于安全距离或安全时间的逻辑算法外,还应考虑驾驶员的状态(是否分心)。因驾驶员反应时间大于2.0 s时发生事故的可能性急剧增加,所以对于处于分心状态的驾驶员,FCW应提早报警。
对于注意力集中的驾驶员,FCW报警可以帮助驾驶员准确地感知当前危险状态,防止驾驶员因驾驶经验欠缺而将危险状态误判为安全状态。相对于分心驾驶员,FCW可对注意力集中的驾驶员稍晚报警,避免引起驾驶员反感而降低系统用户接受度。
在本文设定的追尾危险工况下,驾驶员采用仅转向避撞的比例最低,虽然本文试验结果表明避撞方式对于事故发生率的影响不显著,但仅转向避撞的事故发生率低于其它避撞方式,这与Adams的研究[11]相符。因此有必要开发避撞辅助系统,告知驾驶员最优避撞方式。值得注意的是,驾驶员响应操作非常剧烈时的事故发生率远高于一般剧烈时,本试验中驾驶员非常剧烈的避撞操作大多伴随着较长的反应时间和较小的TTC。在碰撞无法避免的紧急危险工况下,驾驶员往往没有足够的经验应对,不当的转向操作会使较大重叠率的碰撞变为小重叠率的偏置碰撞,不利于发挥车辆的碰撞安全性能。
制动同时转向的驾驶行为有可能导致车辆失稳,产生更为严重的后果。因此,在紧急危险工况下,碰撞无法避免的情况下,仅告知驾驶员最优避撞方式是不够的,需要避撞辅助系统介入车辆的横向和纵向控制,纠正驾驶员因慌乱产生的不当操作,从而避免事故的发生。
5 结束语
本文利用驾驶模拟器测试研究了特定追尾危险工况下驾驶员的响应特性。采用事故发生率作为安全收益评价指标,利用二元Logistic回归方法分析了驾驶员注意力状态、避撞方式、反应时间及避撞操作力度对前碰撞预警系统安全收益的影响。结果表明,驾驶员注意力是否集中显著影响FCW安全收益,FCW算法有必要考虑驾驶员的注意力状态(是否分心)。当驾驶员分心时,FCW应提早预警,保证驾驶员反应时间小于2.0 s,以降低事故发生的可能性。
本文得到的驾驶员避撞行为参数可视为中国驾驶员面对本文设定的追尾危险工况的真实反应,可以用于驾驶员制动和转向行为模型的建立,对于自动紧急制动系统及自动转向避撞系统的开发有一定的参考价值。
1 National Highway Traffic Safety Administration.A Compilation of Motor Vehicle Crash Data from the Fatality Analysis Reporting System and the General Estimates System.Washington:National Center for Statistics and Analysis,2012.54.
2 公安部交通管理局.2013年中华人民共和国道路交通事故统计年报.无锡:公安部交通管理科学研究所,2014.
3 Cheng B,Lin Q,Song T,et al.Analysis of Driver Brake Operation in Near-Crash Situation Using Naturalistic Driving Data.International Journal of Automotive Engineering, 2011,2(4):87-94.
4 江丽君,贺锦鹏,刘卫国,等.自动紧急制动系统测试场景研究.汽车技术,2014(1):39~43.
5 宋晓琳,冯广刚,杨济匡.汽车主动避撞系统的发展现状及趋势.汽车工程,2008,30(4):285~290.
6 贺锦鹏,马芳武,刘卫国,等.汽车前碰撞预警系统ISO15623标准和NHTSA26555评价规程对比试验.汽车技术,2014(7):28~33.
7 Dozza M.What factors influence drivers’response time for evasive maneuvers in real traffic.Accident Analysis and Prevention,2013,58:299-308.
8 李霖,贺锦鹏,刘卫国,等.先进驾驶辅助系统人机交互界面评价方法研究.汽车技术,2014(2):58~62.
9 Aust M L,Engström J,Viström M.Effects of forward collision warning and repeated event exposure on emergency braking.Transportation Research Part F Traffic Psychology &Behaviour,2013,18(5):34~46.
10 Benderius O,Markkula G,Wolff K,et al.Driver behaviour in unexpected critical events and in repeated exposures-a comparison.European Transport Research Review,2014,6(1):51~60.
11 林庆峰,成波.基于Logistic回归的驾驶人跟车危险认知模型.中国公路学报,2011,24(6):103~108.
(责任编辑 文 楫)
修改稿收到日期为2016年9月1日。
Safety Benefit Analysis of Forward Collision Warnings under Different Driver Response Characteristics
Chen Mingyang1,Zhu Xichan1,Ma Zhixiong1,Lu Yiqian1,Jiang Lijun2
(1.Tongji University,Shanghai,201804;2.SAIC Motor Technical Center,Shanghai,201804)
Driver’s collision-avoidance behavior under rear-end collision of dangerous scenarios was studied using driving simulator tests.The accident rate was used as the evaluation index of safety benefit in this paper.The influence of parameters,i.e.driver distraction or not,collision-avoidance method,response time and intensity of operation of forward collision avoidance was analyzed using binary-Logistic Regression Analysis.The results showed that distraction or not of the drive significantly influence the accident rate.Driver’s attention state is suggested to be considered in the algorithm of forward collision warnings to ensure driver response time less than 2s,to reduce the possibility of accident.
Forward collision warning,Safety benefits,Driver behavior
U467.5+24
A
1000-3703(2016)11-0051-05
上海市科学技术委员会基金项目(编号13QB1402300)。