直线感应电机过无次级感应板区检测
2016-12-16刘可安田红旗
刘可安, 田红旗, 刘 勇
(1.中南大学 交通运输工程学院,湖南 长沙,410075; 2.南车株洲电力机车研究所,湖南 株洲 412001)
直线感应电机过无次级感应板区检测
刘可安1,2, 田红旗1, 刘 勇2
(1.中南大学 交通运输工程学院,湖南 长沙,410075; 2.南车株洲电力机车研究所,湖南 株洲 412001)
为解决大功率直线感应电机工程应用中过无次级感应板区域存在的电机电流和推力冲击的问题,详细分析电机非确定电磁感应状态下的电磁特性,得到电机主电感随主、次级耦合程度的变化关系.基于计及动态边端效应的直线电机状态空间方程,提出基于全阶观测器的互感在线辨识算法,依此判定是否运行于非确定电磁感应状态.通过实时调整电机d-q轴指令电流的给定和电机模型高精度计算,实现直线电机非确定电磁感应状态的有效检测和平滑过渡.依托广州地铁5号线实际应用项目进行所提直线电机初、次级非确定电磁感应状态下检测和控制算法的实验验证.实验结果表明:该控制策略能有效实现直线电机牵引车辆无次级感应板区域的平滑过渡,不产生电机电流和推力冲击.
直线感应电机;过无次级感应板区;全阶观测器;在线辨识;转差频率;矢量控制
单边直线感应电机(linearinductionmachine,LIM)驱动的轮轨车辆由轮轨起支撑和导向作用,相对于磁悬浮列车来说不需要复杂的悬浮系统.且直线感应电机初级加长、气隙减小、系统效率和功率因数较悬浮列车来说有较大提高,同时又保留了直线牵引系统的优点[1~3],如:爬坡能力强、拐弯半径小、造价低、最大牵引力的发挥不受轮轨黏着关系的限制等,成为城市轨道交通车辆发展的新方向,在日本、加拿大以及中国北京、广州等国家和地区10多条线路进行商业运营[4-5].
相对于旋转电机,直线电机有其自身的特点,国内外诸多学者在直线电机的数学模型和控制方法上进行了持续不懈的努力.Dunan等[6]首先提出了考虑边端效应的直线电机等效电路.徐伟等[7-10]对直线电机的推力特性、电机模型等方面进行了深入的研究.在直线电机控制技术方面,通常采用的是基于次级磁场定向控制的闭环控制方法,关注的重点是边端效应的影响[11-15]以及直线电机法向力和推力的解耦控制[16-22].
通过分析直线电机的推力特性和法向力特性可知,直线电机法向力与转差频率之间存在耦合关系.为减小推进系统法向力的影响,一般优先采用恒转差频率控制.文献[23]、[24]对开环控制方式下的恒转差频率控制方法进行了算法仿真和理论分析,但其控制方式仍为传统的标量控制,系统的动态响应性较差,难以满足现代轨道交通的快速加减速要求.
工程应用中因施工及过岔口等原因,在车辆进、出库的线路上有些区段没有布置次级感应板.当车辆通过无次级感应板区域时,次级变成部分开放,电机性态发生变化,造成电机输出电流和推力冲击,长期如此将导致车辆轮对的不规则磨损.目前,相关研究文献较少.文献[25]介绍了广州地铁4号线直线电机牵引系统具备此功能[25].当实际电流超过系统设定值时,及时降低电流指令值,从而防止逆变器和直流电机过流.但由于采用的牵引系统由日本三菱公司提供,具体如何实现不得而知.
针对无反应板区域电机初、次级非确定电磁感应状态引起的电机电流和推力冲击问题,建立计及边端效应的直线电机状态空间方程,并将恒转差频率控制与经典的矢量控制相结合,形成适用于直线感应电机的恒转差频率矢量控制方法.采用AnSoft进行直线感应电机非确定电磁感应状态的详细分析,提出基于全阶状态观测器的互感在线辨识算法实现对无次级感应板区工况的快速检测和控制.通过进行控制策略仿真,并依托广州地铁5号线自主开发的直线电机轮轨车辆牵引系统进行控制算法的实验验证.
1 直线感应电机等效电路及数学模型
在工程应用中为解决问题的方便同时不影响其准确性,对电机一般可作如下假定:1)忽略空间和时间谐波,电机各绕组对称;2)忽略磁路饱和;3)忽略铁芯损耗;4)忽略温度和频率变化对电阻的影响.直线电机与旋转电机最大的区别在于其动态边端效应.当初级和次级以低于初级行波磁场的速度相对运动时,气隙磁场因遵守磁链守恒定律,在初级铁心的入口端,次级感应板会产生一个削弱气隙磁场的感应电流以抵抗气隙磁场的增强;在初级铁心的出口端,次级感应板会产生一个加强气隙磁场的感应电流以抵抗气隙磁场的削弱.考虑动态边端效应下的直线感应电机等效电路[6,23]如图1所示,图中im为励磁电流.

图1 直线感应电机等效电路图Fig.1 Equivalent circuit of linear induction motor
根据电机的长度和初级速度可以得到标幺化的电机长度为
(1)
(2)
式中:D为电机初级长度,Rr为次级电阻,v为电机速度,Lσr为次级漏感,Lm为互感.
直线电机电压方程和磁链方程[18-20]为


(3)
(4)
式中:us为定子电压、Rs、Rr、is、ir、ψs、ψr、Lσs、Lσr分别为初级和次级的电阻、电流、磁链、漏感.
次级感应电流与行波磁场相互作用从而产生电磁推力,使次级沿着行波磁场的方向作直线运动.推力Fe方程为

(5)
式中:p为电机极数,τ为电机极距,ψsα、ψsβ分别为初级磁链的α、β轴分量,isα、isβ分别为初级线圈电流的α、β轴分量.
法向吸引力方程[19]为

(6)
式中:


法向排斥力方程[19]为

(7)

以is、ψr为状态空间变量得到直线电机的状态空间方程为
(8)
式中:



令x=[is,ψr]T,将式(8)描述成矩阵形式得
(9)
式中:




2 直线电机恒转差频率矢量控制

图2 不同定子频率下直线电机推力和法向力随转差率的变化关系曲线Fig.2 Relation curve of thrust and normal force changing with slip frequency for induction motor under different stator frequencies
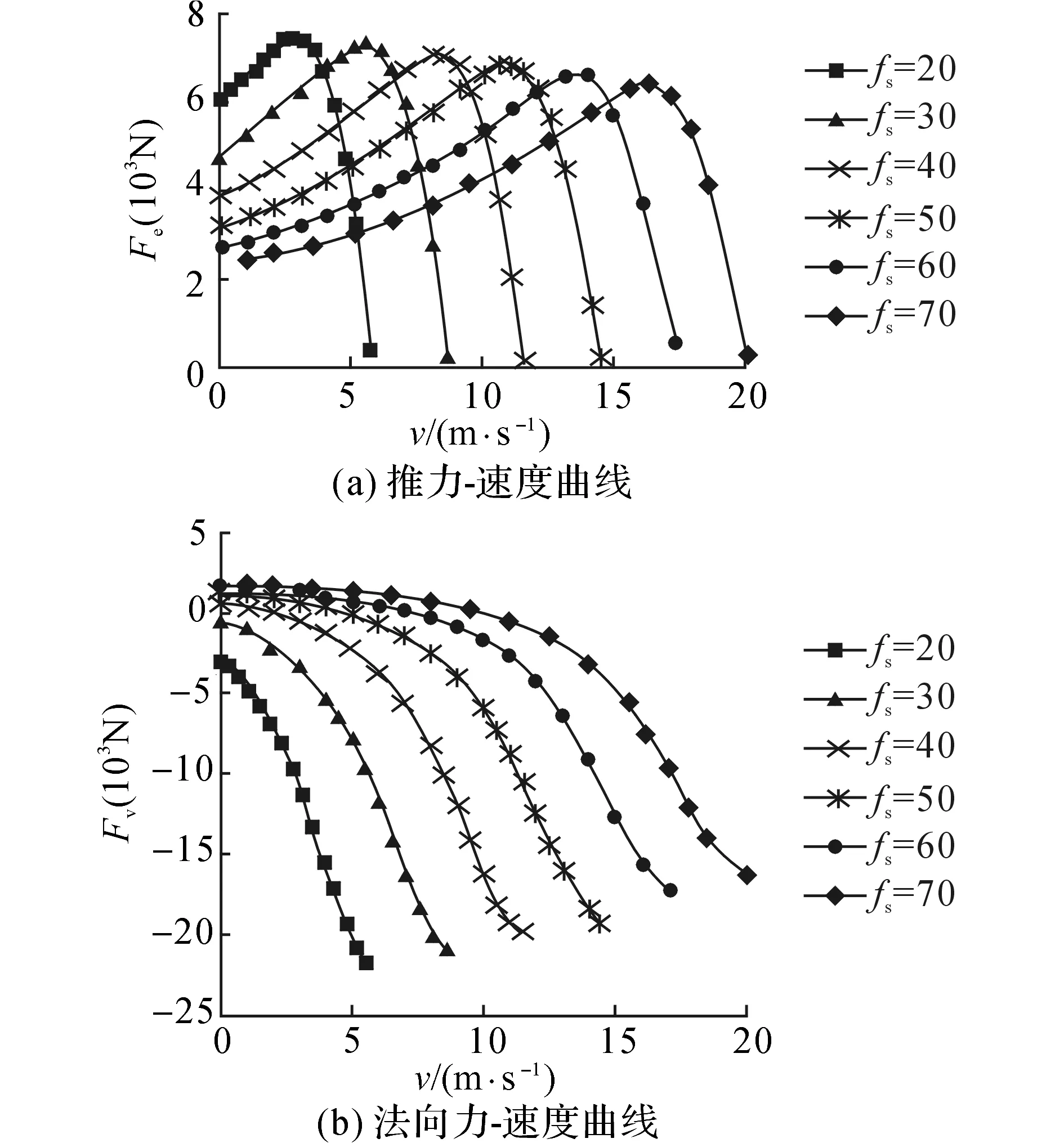
图3 不同定子频率下直线电机推力和法向力随速度的变化关系曲线Fig.3 Relation curve of thrust and normal force changing with velocity for induction motor under different stator frequencies
通过对LIM的推力、法向力特性进行仿真,得到如图2~3所示的关系曲线,图中fs为不同定子的频率.分析可知:存在一个最优的转差频率值并且只有以此转差频率ωslip运行才能保证LIM产生的推力较大而法向力在预定允许的范围内波动,否则牵引传动系统产生的法向力波动很大,将严重影响车辆的正常运行.为此,本文提出基于次级磁场定向直线电机恒转差频率矢量控制算法.
在次级磁场定向坐标系下,有

(10)
推力表达式为

(11)
由式(11)得

(12)


(13)
由电机方程可得
(14)


(15)
经过速度采集并通过ωm=(π·τ)/τ得到次级角频率ωm;由ω1=ωm+ωslip可得到初级角频率ω1;通过下式:
θ=∫ω1dt,
得到相位角θ,用于坐标变换.角度积分的平滑性只与转速有关,而转速的检测非常准确,并且变化较为缓慢,因此该控制方式的定向角度非常平稳、准确.
3 过无次级感应板区域控制策略
3.1 仿真对象
当车辆通过无反应板区域时,次级变成部分开放,为探索此过程中的电机相关参数的变化规律,采用ANSOFT二维瞬态电磁场进行电机过无反应板区过程的动态仿真.仿真对象主要参数如下:初级电阻0.116 3Ω,初级漏感4.34mH,互感24.9mH,次级电阻0.184Ω,次级漏感2.1mH,额定容量165kW,额定电压1 100V,额定电流210A,额定频率22.5Hz,极对数为4.
3.2 仿真结果
仿真时,次级速度为1.5m/s,通过建模分析得到初级和次级完全耦合、一半耦合、没有耦合情况下的磁力线分布如图4~6所示,通过软件后处理得到绕组各相自感变化参数如图7所示.
图4 初级与次级磁场完全耦合时磁力线分布Fig.4 Distribution of flux when primary and secondary magnetic fields are 100% coupled
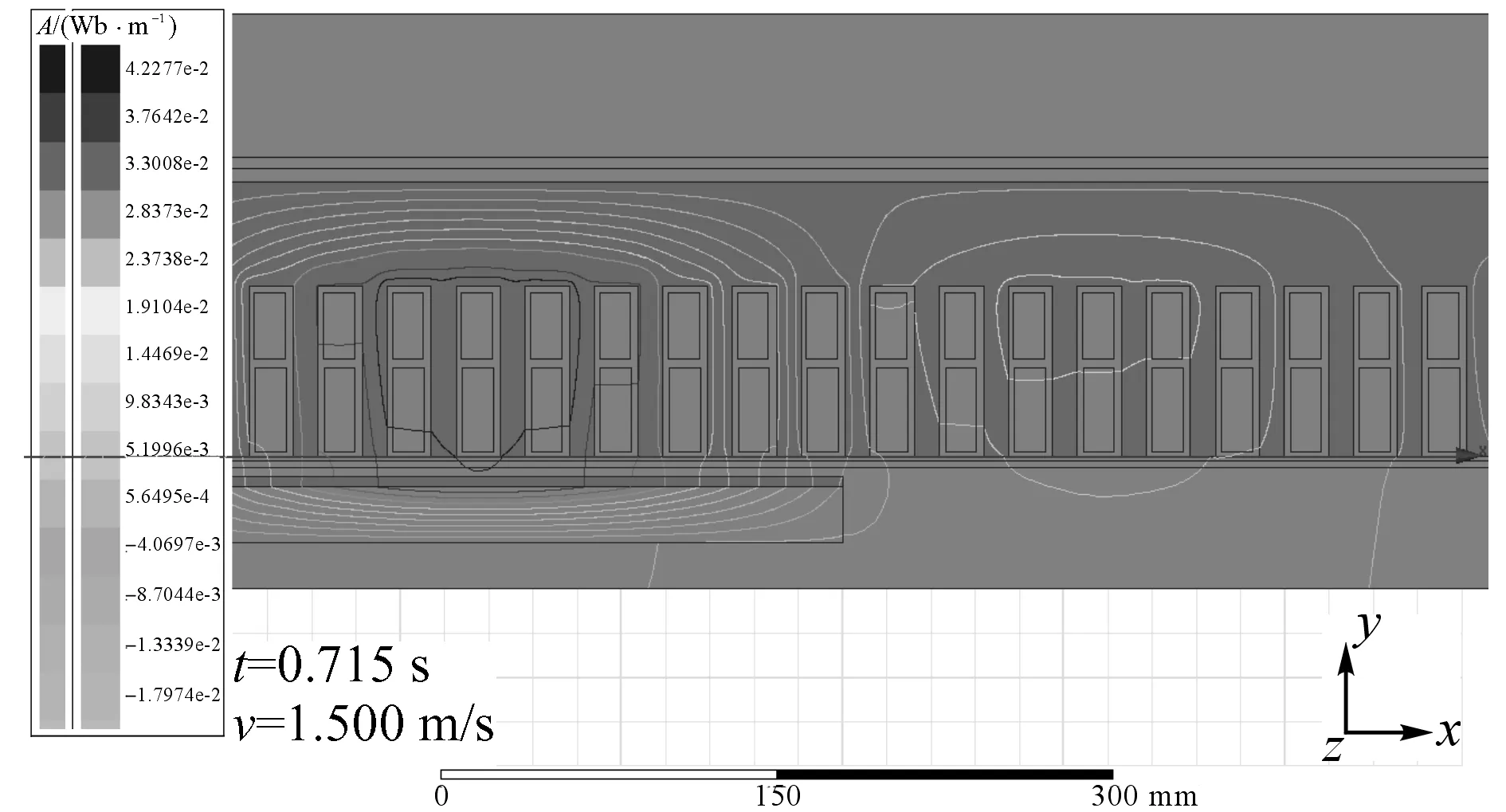
图5 初级与次级磁场耦合一半时磁力线分布Fig.5 Distribution of flux when primary and secondary magnetic fields are 50% coupled

图6 初级与次级磁场完全分离时磁力线分布Fig.6 Distribution of flux when primary and secondary magnetic fields are separated completely
图7 绕组各相自感变化Fig.7 Variation of self-induction for each phase
3.3 仿真结果后处理
使用ANSOFTTransient模块计算三相电感矩阵Luvw,利用Mathcad软件根据下述电机坐标变换电感矩阵计算公式计算出励磁电感d-q轴分量Lmdq:
Lmdq=[LmdLmq]T,Lm=CT×Luvm×C.
(16)
(17)
对角线Luu、Lvv、Lww为各相自感,其他为相间互感.

(18)
通过上述计算可求出Lm随主次级耦合程度的变化关系如图8所示.

图8 主电感随主、次级耦合系数的变化趋势Fig.8 Variation trend of inductance and primary-secondary coupling coefficient

3.4 无次级感应板区域检测
基于上述仿真分析,本文提出一种基于互感实时在线辨识的无次级感应板区域检测算法.列车运行过程中,对直线电机互感进行实时在线辨识,当观测的互感小于一定阀值时,则认为处于过无次级感应板区域.

(20)



则根据式(9)和(20)得


(21)


(22)
求ΔA11的推导过程如下:
令

则
因此,


进一步设计非线性函数f(·)使得系统为超稳定并且满足波波夫判据,即必须满足波波夫不等式:
(23)
式中:γ0为任意小的正数,将相关量带入可得

(24)
为满足波波夫判据,需要进行自适应辨识率的设计,首先令互感观测器方程为

(25)

(26)
假定互感初始值与实际值近似或相同,则上式可写为

(27)
上式可分解为

(28)

(29)

如令:
εf2(ε,t)=εKp,Kp>0.
(30)
则不等式(29)成立.


(31)
将式(31)代入式(28)得到
(32)
因此不等式(28)和(29)均成立,式(26)满足波波夫不等式条件,其中Kp、Ki表示比例和积分常数,因此互感可通过下式进行观测:
(33)
3.5 无次级感应板区域控制

图9 直线电机控制框图Fig.9 Block diagram for induction motor controlling
过无次级感应板区域控制算法的核心是直线感应牵引电机观测模型的计算,其对次级磁链、输出推力等进行观测,并通过自适应辨识算法对互感进行观测,因此电机模型的观测准确性直接决定了电机控制性能的好坏.而电机观测模型的核心问题是其反馈增益矩阵G的最优化配置.因为电机物理模型在全速域范围是绝对稳定的,其电机方程的极点位于s域平面左半平面,因此可将直线电机观测器方程(20)的极点配置为电机方程(9)的ρ倍(ρ>1),则观测器方程可同时满足稳定性要求和快速收敛性要求.通过控制理论相关知识可得,ρ值越大,则观测器收敛速度越快,但由于实际应用中电流、电压、速度传感器存在一定的测量误差、并且由于轨道交通应用场合功率器件的开关频率通常小于500Hz,电机方程的迭代误差较大,将导致系统的稳定性下降甚至是观测失败,因此工程应用中需根据实际情况进行一定的试凑调整以得最优结果.

4 仿真及分析
基于广州地铁5号线直线电机项目进行了控制算法的MATLAB仿真,初级电阻Rs=0.109Ω,L1s=3.6mH,极对数为4,电机极距τ=0.280 8m,次级电阻和互感随速度变化.
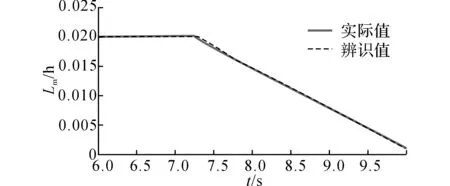
图10 进无次级感应板区主电感辨识仿真波形Fig.10 Simulation for main inductance estimation entering no secondary reaction plate area
通过互感辨识仿真来模拟进无次级感应板区的控制过程.仿真过程中观测到的互感变化如图10所示,在仿真进行到7.2s时,设置互感参数值线性下降到零,以模拟进入无次级感应板区,此过程中电机模型观测到的互感辨识值也开始下降,并快速收敛于其目标值.当其未到预设门槛值之前,依旧遵从原控制策略,根据式(13)和(15)进行指令电流的给定计算.当互感辨识值下降到预设门槛值后,切换到无次级感应板控制模式,d-q轴指令电流给定保持恒定,根据互感实时辨识值进行电机模型的高精度计算.初级电流波形如图11所示,波形表明:采用本文提出的控制策略,能实现无次级感应板区的平滑过渡,不会产生任何电流冲击.

图11 进无次级感应板区初级电流仿真波形Fig.11 Simulation for primary current entering no secondary reaction plate area
5 实验验证
基于南车株洲所自主开发的牵引系统控制平台于广州地铁五号线进行了相关控制策略的现场试验.地铁出入库路段存在较多的无次级感应板区,为本文提出的无次级感应板区控制算法的实验验证提供了有利的条件.采用南车株洲所开发的CSR-Drive在线观测软件以100μs的采样间隔对互感、初级电流等控制变量进行波形监测.

图12 正常工况下的d-q轴指令电流和反馈电流Fig.12 d-q reference and feedback currents in normal working station
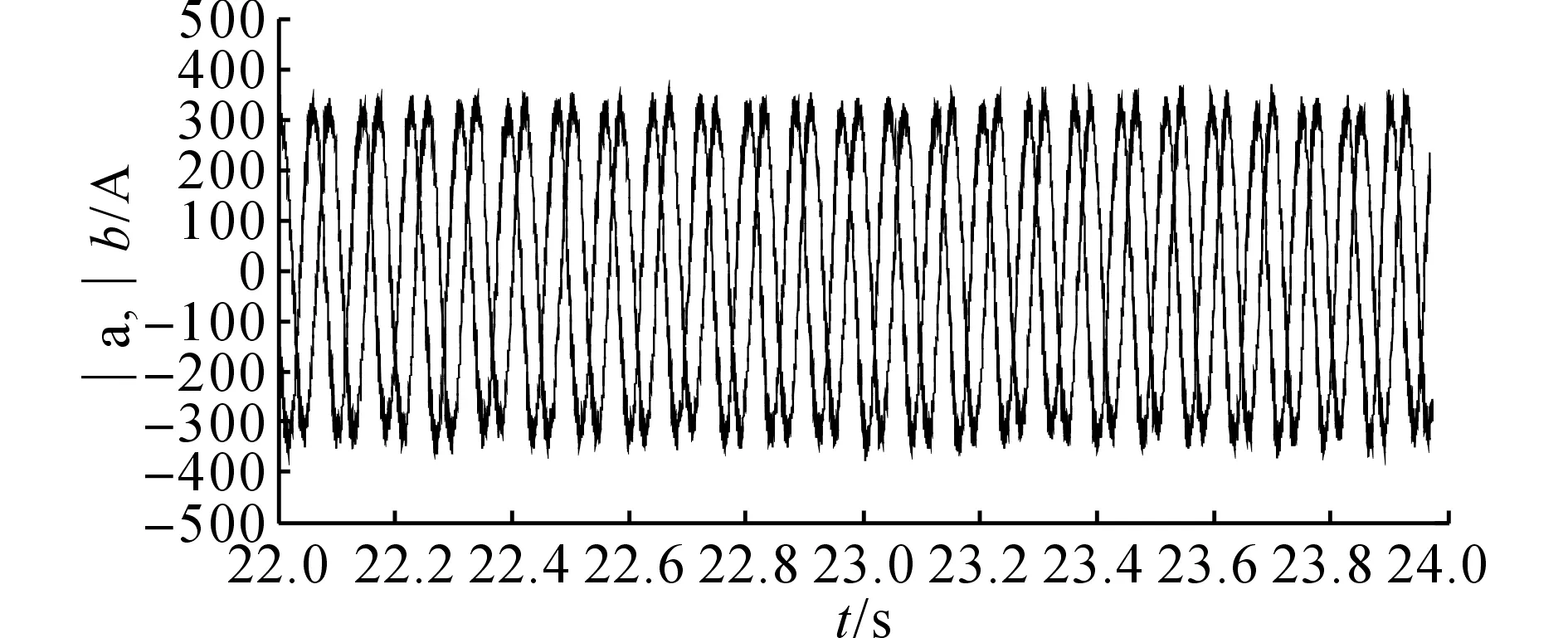
图13 正常工况下的初级电流波形Fig.13 Primary currents in normal working station

图14 过无次级感应板区互感观测波形Fig.14 Mutual inductance estimated passing no secondary reaction plate area
试验中进行一节车的测试验证,正常工作模式下的D-Q轴指令电流和反馈电流如图12所示,初级电流波形如图13所示.过无次级感应板区域过程中观测到的互感变化如图14所示,当其下降到预设门槛值以下即进入无次级感应板控制模式,在此控制模式下,调节d-q轴指令电流的给定;当辨识的互感值大于设定门槛值则认为进入正常工作模式,整个进出无次级感应板区实验过程中监测到的d-q轴指令及反馈电流波形如图15所示,初级电流波形如图16所示,如图17所示为试验过程中电机模型观测的推力波形.广州五号线试验数据表明,在整个过无次级感应板运行过程中,电机电流和输出推力未见冲击,控制过程过渡平滑.

图15 过无次级感应板区d-q轴指令电流和反馈电流Fig.15 d-q reference and feedback currents passing no secondary reaction plate area
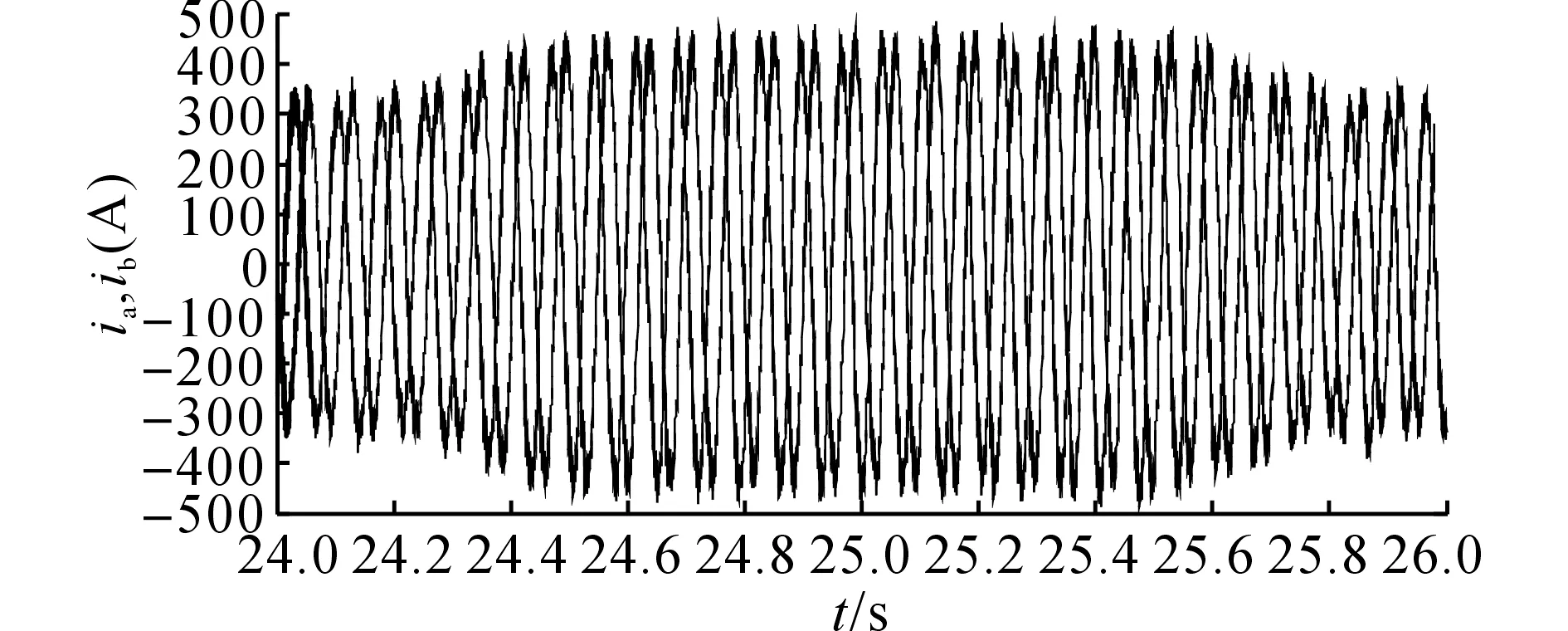
图16 过无次级感应板区初级电流波形Fig.16 Primary currents passing no secondary reaction plate area

图17 过无次级感应板区输出推力波形Fig.17 Thrust force estimated passing no secondary reaction plate area
6 结 论
针对轨道交通应用中次级感应板的缺失严重影响轨道交通直线感应电机控制性能的重要问题,本文提出了基于全阶观测器的互感在线辨识算法来实现对电机非确定电磁感应状态的快速检测和控制.并通过实时调整电机d-q轴指令电流的给定和电机模型高精度计算,实现直线电机非确定电磁感应状态的有效检测和平滑过渡.该控制策略能有效实现直线电机牵引车辆无次级感应板区域的平滑过渡,不产生电机电流和推力冲击.但是在线辨识算法计算量较大,对数字信号处理器的要求较高.
[1]NONAKAS,HIGUCHIT.Designofsingle-sidedlinearinductionmotorsforurbantransit[J].IEEETransactionsonVehicularTechnology, 1988, 37(3): 167-173.
[2]MORIZANET,TSUJIKAWAK,KIMURAN.Controloftractionandlevitationoflinearinductionmotordrivenbypowersourcewithfrequencycomponentsynchronouswiththemotorspeed[J].IEEETransactionsonMagnetics, 2011, 47(10): 4302-4305.
[3]WAIRong-Jong,LEEJeng-Dao.Dynamicanalysisandstabilizingcontroloflinearmagnetic-levitationrailsystem[C] ∥The33rdAnnualConferenceoftheIEEEIndustrialElectronicsSociety.Taipei:IEEE, 2007: 2213-2218.
[4] 徐伟,汪旭东,袁世鹰.交通牵引大功率单边直线感应电机性能研究[J].电机与控制学报, 2008, 12(4): 396 - 402.XUWei,WANGXu-dong,YUANShi-yin.Performanceresearchonhighpowersinglelinearinductionmotorintractivetransportation[J].ElectricMachinesandControl, 2008, 12(4):396-402.
[5] 吕刚, 孙守光, 马云双. 城轨交通中直线感应牵引电机的效率最优控制[J].电机与控制学报, 2009, 13(4): 490 -495.LVGang,SUNShou-guang,MAYun-shuang.Efficiencyoptimalcontroloflinearinductionmotorforurbanrailtransit[J].ElectricMachinesandControl, 2009, 13(4): 490-495.
[6]DUNCAJ.Linearinductionmotor-equivalent-circuitmodel[J].IEEProceedingsB:ElectricPowerApplications, 1983, 130(1): 51-57.
[7] 徐伟,李耀华,孙广生,等.短初级单边直线感应电机新型等效电路[J].中国电机工程学报, 2009,29(9):80 -86.XUWei,LIYao-hua,SUNGuang-sheng,etal.Newequivalentcircuitsofshortprimarysingle-sidedlinearinductionmotor[J].ProceedingsoftheCSEE, 2009,29 (9): 80-86.
[8]XUW,ZHUJG,ZHANGYC,etal.Animprovedequivalentcircuitmodelofasingle-sidedlinearinductionmotor[J].IEEETransactionsonVehicularTechnology, 2010, 59(5): 2277-2289.
[9] 卢琴芬,方攸同, 叶云岳.大气隙直线感应电机的力特性分析[J]. 中国电机工程学报,2005, 25(21): 132-136.LUQin-fen,FANGYou-tong,YEYun-yue.Astudyonforcecharacteristicoflargeairgaplinearinductionmotor[J].ProceedingsoftheCSEE, 2005, 25(21): 132 - 136.
[10] 卢琴芬,张新敏, 黄立人, 等. 错位式双边型永磁直线同步电机优化设计[J]. 电工技术学报, 2013,28 (11):35-41.LUQin-fen,ZHANGXin-min,HUANGLi-ren,etal.Optimaldesignofshiftedtypedouble-sidedpermanentmagnetlinearsynchronousmotors[J].TransactionsofChinaElectrotechnicalSociety, 2013,28 (11):35-41.
[11]ABBASIANM.Adaptiveinput-outputcontroloflinearinductionmotorconsideringtheendeffect[C] ∥XIXInternationalConferenceonElectricalMachines.Rome:ICEM, 2010: 1-5.
[12]HUANGC,HSUK,CHIANGH,etal.Adaptivefuzzyslidingmodecontroloflinearinductionmotorswithunknownendeffectconsideration[C] ∥Proceedingsofthe2012InternationalConferenceonAdvancedMechatronicSystem.Tokyo:ICAMS, 2012: 626-630.
[13]PUCCIM.Statespace-vectormodeloflinearinductionmotors[J].IEEETransactionsonIndustryApplication, 2014, 50(1):195-207.
[14]ACCETTAA,CIRRINCIONEM,PUCCIM.etal.Neuralsensorlesscontroloflinearinductionmotorsbyafull-orderluenbergerobserverconsideringtheendeffects[J].IEEETransactionsonIndustryApplication, 2014, 50(3):1891-1904.
[15]HAJJIM,KHOIDJAM,BARHOUMIE,etal.Vectorcontrolforlinearinductionmachinewithminimizationoftheendeffects[C] ∥ 2012FirstInternationalConferenceonRenewableEnergiesandVehicularTechnology,Hammamet:REVET, 2012: 466-471.
[16] 王利, 卢琴芬, 叶云岳. 永磁直线同步电机无位置传感器动子位置辨识[J]. 电机与控制学报, 2012,16(6): 7-12.WANGLi,LUQin-fen,YEYun-yue.Sensorlessmoverpositionestimationofpermanentmagnetlinearsynchronousmotor[J].ElectricMachinesandControl, 2012,16(6): 7-12.
[17] 施俊, 方攸同, 叶云岳. 基于单神经元PI调节的直线感应电机矢量控制系统仿真与试验[J].电工技术学报, 2003, 18(4):94-101.SHIJun,FangYou-tong,YEYun-yue,etal.VectorcontrolsystembasedonsingleneuronPIforlinearinductionmotor[J].TransactionsofChinaElectrotechnicalSociety, 2003, 18(4):94-101.
[18] 任晋旗,李耀华,王珂.动态边端效应补偿的直线感应电机磁场定向控制[J]. 电工技术学报, 2007, 22(12): 61-65.RENJin-qi,LIYao-hua,WANGKe.Indirectfieldorientedcontroloflinearinductionwithendeffectcompensation[J].TransactionsofChinaElectrotechnicalSociety, 2007, 22(12): 61- 65.
[19] 吕刚, 范瑜, 李国国, 等. 基于解耦策略的直线感应牵引电机法向力自适应最优控制[J]. 中国电机工程学报, 2009,29(9): 73-79.LVGang,FANYu,LIGuo-guo,etal.Normalforceadaptiveoptimalcontrolforlinearinductionmotorbasedondecouplingstrategy[J].ProceedingsoftheCSEE, 2009,29(9):73-79.
[20] 顾赟, 杨中平. 牵引直线感应电机推力优化控制的研究[J]. 铁道学报, 2011, 33(4):46-52.GUYun,YANGZhong-ping.Torqueoptimizedcontrolstrategyforlinearinductionmotordrive[J].JournaloftheChinaRailwaySociety, 2011, 33 (4):46-52.
[21] 邓江明,陈特放,唐建湘,等. 单边直线感应电机的无速度传感器虚拟控制[J]. 中国电机工程学报,2012,32 (27):53-59.DENGJiang-ming,CHENTe-fang,TANGJiang-xiang,etal.Virtualspeedsensorlessdesiredcontrolstrategyofmaglevsingle-sidedlinearinductionmotors[J].ProceedingsoftheCSEE, 2012, 32(27):53-59.
[22] 史黎明,何晋伟,王珂,等.直线感应电机间接磁场定向悬浮牵引联合控制[J].电机与控制学报, 2009, 13 (2):179-183.SHILi-ming,HEJin-wei,WANGKe,etal.CombinedcontroloflevitationandpropulsionforlinearinductionmotorbasedonIFOmethod[J].ElectricMachinesandControl, 2009, 13(2): 179-183.
[23] 杨影, 陶生桂, 吴志红,等. 磁浮列车直线感应电机控制的仿真研究[J].同济大学学报:自然科学版,2006, 34(2): 244-248.YANGYing,TAOSheng-gui,WUZhi-hong,etal.Simulationresearchonlinearinductionmotorformaglevvehicles[J].JournalofTongjiUniversity:EngineeringScience, 2006, 34(2): 244-248.
[24] 邓江明, 陈特放, 唐建湘, 等. 单边直线感应电机动态最大推力输出的转差频率优化控制[J].中国电机工程学报, 2013,33(12): 123-130.DENGJiang-ming,CHENTe-fang,TANGJian-xiang,etal.Optimumslipfrequencycontrolofmaglevsingle-sidedlinearinductionmotorstomaximumdynamicthrust[J].ProceedingsoftheCSEE, 2013,33(12): 123-130.
[25] 郑沃奇. 广州地铁四号线直线电机车辆牵引系统[J]. 电力机车与城轨车辆, 2007, 30(1): 62-65.ZHENGWo-qi.LIMtractionsystemofGuangzhoumetroline-4vehicles[J].ElectricLocomotivesandMassTransitVehicles, 2007, 30(1): 62-65.
Detectionofpassingareaofnosecondaryreactionplateforlinearinductionmotor
LIUKe-an1,2,TIANHong-qi1,LIUYong2
(1.SchoolofTrafficandTransportationEngineering,CentralSouthUniversity,Changsha410075,China;2.CSRZhuzhouInstituteofElectricLocomotive,Zhuzhou412001,China)
Theelectromagneticcharacteristicsofthemotorunderuncertainelectromagneticinductionstatewereanalyzedinordertoresolvetheproblemthattherewereshocksofthemotorcurrentandoutputthrustforthelinearinductionmotorwhenpassingtheareaofnosecondaryreactionplate.Thenthechangerelationofthemaininductancewiththecouplingdegreeofprimaryandsecondarywasobtained.Asimulationwasconductedandthevariationofmotorparametersinthisprocesswasstudied.Anadaptiveidentificationalgorithmbasedonfull-orderstateobserverformutualinductancewasproposedtojudgewhetherthemotorwasinthisuncertainareaornot.Theuncertainareawasdetectedeffectivelyandpassedsmoothlybyadjustingthed-qcurrent
inreal-timeandcalculatingthemotormodelprecisely.TestontheGuangzhouMetroLine5provedthevalidityoftheproposeddetectionandcontrolalgorithminuncertainelectromagneticinductionbetweenprimaryandsecondarycondition.Withthiscontrolstrategy,theexperimentalresultsshowthatthelinearinductionmotorcanpasstheareaofnosecondaryreactionplatesmoothlywithoutanyshocksofthemotorcurrentandthrust.
linearinductionmotor;noreactionplatearea;full-orderobserver;onlineidentification;slipfrequency;vectorcontrol
2015-04-27.
湖南省战略新兴产业专项引导资金项目.
刘可安(1971—),男,教授级高级工程师,博士,从事大功率轨道交通交流传动控制技术研究.ORCID:0000-0001-9982-2116.E-mail:110971836@qq.com
10.3785/j.issn.1008-973X.2016.12.022
TM
A
X(2016)12-2409-09
