基于Matlab/FlightGear的导弹飞行姿态与轨迹可视化系统
2016-12-15黄金阳辛长范马云建贾意弦白敦卓
黄金阳,辛长范,马云建,贾意弦,白敦卓
(1.中北大学机电工程学院,太原030051;2.豫西工业集团有限公司,南阳473000)
基于Matlab/FlightGear的导弹飞行姿态与轨迹可视化系统
黄金阳1,辛长范1,马云建1,贾意弦1,白敦卓2
(1.中北大学机电工程学院,太原030051;2.豫西工业集团有限公司,南阳473000)
在导弹6自由度运动学方程组的基础上构建了6自由度矩阵式运动学方程组,使用Matlab/Simulink编程工具构建了导弹的非线性6自由度矩阵式Simulink模型。利用AC3D软件建立导弹的三维物理模型,在对指定部位设置了对象名称后,将其导入至FlightGear中。最后,通过数据接口将Simulink中的仿真数据传输至FlightGear,从而控制导弹的飞行姿态与轨迹,并在FlightGear中实时显示。该可视化仿真可以多视角全方位直观地显示导弹的飞行姿态与轨迹,为导弹的可视化研究提供了便利的方法。
可视化;飞行动力学;FlightGear;Matlab
0 引言
导弹是一种依靠制导系统来控制飞行轨迹的可以指定攻击目标,甚至追踪目标动向的飞行武器。相比于普通弹药,导弹的结构更复杂,性能更先进,价格也更加昂贵[1]。由于其造价过高且只能一次性使用,因此不能大量地使用实弹飞行方法来进行试验[2]。在传统的导弹飞行弹道仿真中,人们根据导弹自身的运动规律计算出导弹飞行过程中各个时刻的弹着点,对导弹弹道进行数据仿真,从而在二维或三维平面网格空间中绘制出弹道轨迹。这种导弹弹道的仿真不能直观实时多角度地显示导弹飞行时姿态与轨迹的变化且无法进行交互式处理。为了解决这一问题,本文将Matlab与FlightGear软件相结合,搭建了一个导弹可视化交互式的仿真系统。
FlightGear是一个多平台开源的飞行模拟器[3],由于开放了源代码,用户获得免费资源的同时,还可对源文件进行必要的修改。FlightGear具有开放式的程序构架和预留的外部数据输入/输出接口,使其作为飞行仿真可视化引擎在科学研究中被广泛的使用。Simulink中包含数据发送与接收模块,无需使用繁琐的接口技术就可以通过Simulink来驱动FlightGear进行模拟仿真[4]。该仿真方法具有跨平台应用、多场景仿真、实时数据处理、飞行器可自定义等优点[5]。
1 仿真系统的实现方法
仿真系统包括了Simulink仿真模型以及可视化部分,前者中包括描述导弹运动的矩阵方程组和建立的矩阵式Simulink模型。导弹飞行过程的方程组涉及了姿态动力学、运动学以及平动动力学、运动学相关方面的内容。利用Simulink编程工具建立模型,将得到的矩阵式运动学方程组转化为其对应的动力学仿真模型[6]。Simulink提供了图形用户接口(GUI),使得仿真过程较为直观,可视化效果较好,而且仿真算法的可靠性也有很大的提高[7⁃8]。可视化部分由FlightGear软件、导弹的物理模型及其配置文件组成。FlightGear作为一款开源软件,不仅提供了多种飞行器模型供用户选择,用户还可以根据需要建立自己的飞行器模型。本文中利用AC3D建立导弹的三维物理模型,对模型进行配置后将其导入到FlightGear。Simulink仿真模型通过数据发送模块将数据传输到可视化平台,仿真结果就能在FlightGear中实时显示,如图1所示。

图1 仿真总体框图Fig.1 Diagram of simulation
2 导弹数学及物理模型的建立
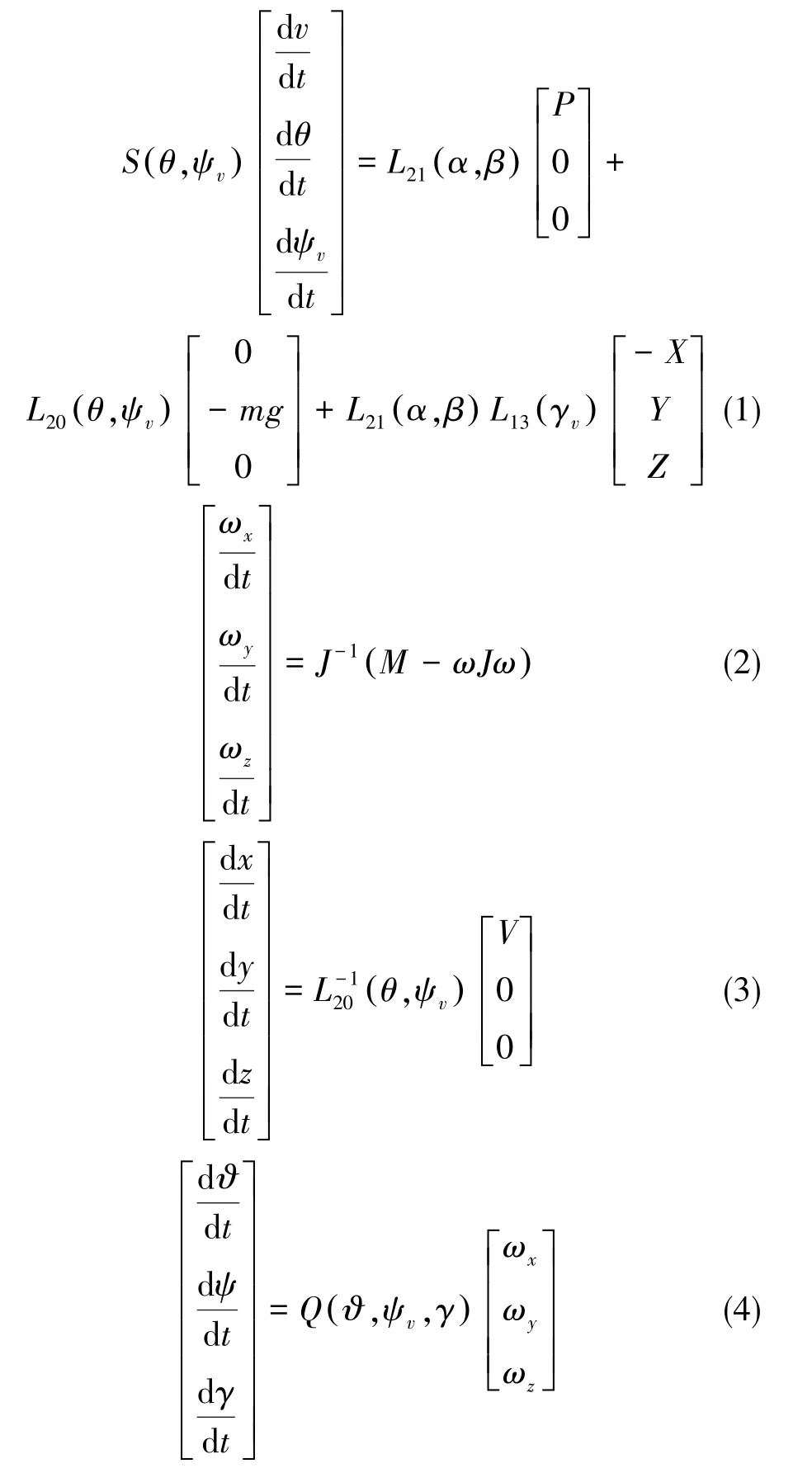
飞行动力学把导弹弹体视为理想刚体,这样导弹在空中的运动有6个自由度,即弹体质心的3个移动自由度和弹体绕质心的3个自由度。在本文中,为了充分利用Matlab强大的矩阵运算功能以及保证模型的模块化结构,将标量式的方程组[9]转化为了矩阵式方程组。公式如下:
由于在仿真结果中主要是观察导弹的飞行姿态与轨迹,因此导弹的物理模型直接影响仿真的显示效果。本文采用AC3D软件对弹体进行建模。AC3D中的元素类型包括顶点、曲线、对象等,其中,对象是模型中最重要的元素。由于在FlightGear中使用对象名称来控制对象完成指定的动作,所以在AC3D中需要为每个对象设置对象名称[10⁃11]。在建模时对导弹内部结构进行了简化,导弹模型如图2所示。

图2 AC3D建立的导弹模型Fig.2 The missile model
3 仿真模型的建立与数据处理
导弹的矩阵式运动方程组是用来描述作用在导弹上的力、力矩与导弹运动参数之间关系的方程组。建立的6自由度矩阵式运动方程组包括了质心运动方程组、绕心运动方程组以及各方位角之间的关系。通过分析该矩阵方程组,用Simulink建立导弹运动方程组的矩阵式仿真模型,并对其中复杂的模块进行子系统的封装。矩阵式Simulink仿真模型的总体结构如图3所示。
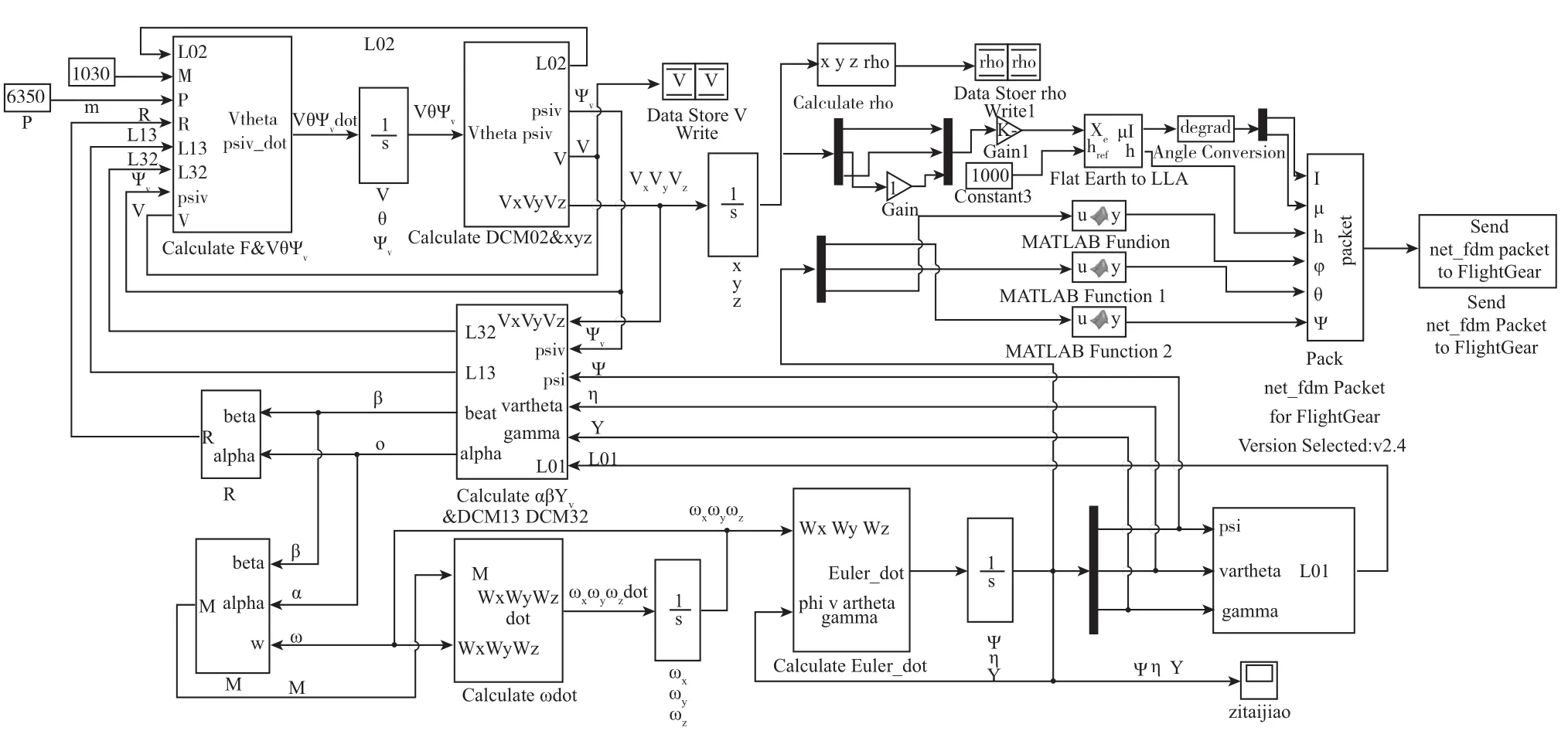
图3 Simulink仿真系统Fig.3 Simulink simulation system
模型建立后,需要对数据进行处理分析。首先是不同坐标系之间的转换。由于导弹飞行过程中受到的各种力和力矩在特定的坐标系里表示较为方便,而外弹道方程组中的力和力矩的计算必须转换到同一个坐标系中。因此力和力矩要在不同的坐标系之间进行转换[12]。
测地学坐标系使用三维球面来定义地球表面位置,FlightGear中使用该坐标系定位飞行器的位置。测地学坐标系使用经度、纬度来表示物体的空间位置,但是不能计算长度及面积。发射坐标系以发射点为原点,用来描述弹体相对于发射点的运动,并确定弹体质心相对于发射点的位置与姿态[13]。将弹体在发射坐标系下的坐标转换成大地坐标系的计算步骤如下:
1)计算当前子午圈半径RN和卯酉圈半径RM
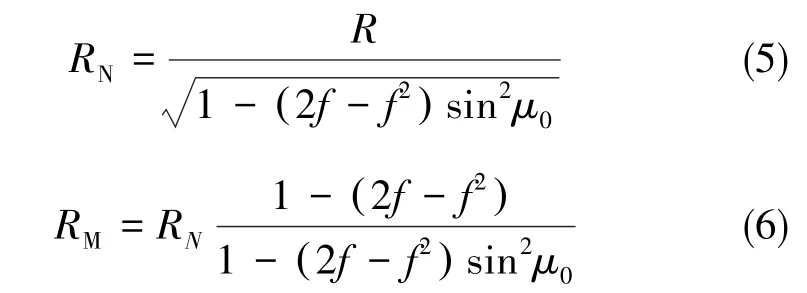
2)计算东向及北向的增量

3)计算经纬度的增量
4)计算当前经度及纬度

其中,f=1/298.25722,为基准椭球体极扁率;R=6378137m,为地球半径;μ为当前纬度,μ0为初始纬度,τ为当前经度,τ0为初始经度,RN为子午圈半径,RM为当前纬度下卯酉圈半径,dN为北向增量,dE为东向增量,ψ为射向角,X为射程,Z为侧偏。
4 导弹模型的驱动
导弹模型的驱动包括载入飞行器的模型和配置飞行器需要完成的动作,都需要用XML文件对模型进行配置。FlightGear软件中使用了大量的XML文档作为配置文件,用于定义软件的运行环境、外界数据,以及飞行器的动作、位置及姿态参数定义等[14⁃15]。FlightGear允许用户控制飞行器的任意部位完成指定的动作,前提条件是这一部位要在三维模型中设置对象名称[16]。导弹的模型在仿真飞行中需要完成俯仰、偏航、滚转以及舵面的偏转等动作,都需要在XML文件中进行配置。XML也有自己的一套语法格式,其中Rotate为导弹主要使用的动作,其定义的是旋转动作类型。在该命令中需要定义指定对象的旋转中心以及旋转轴。本文中配置文件主要包括以下内容:1)指定弹体模型;2)指定飞行动力学模型;3)指定弹体动作参数。配置文件完成后,将其放入FlightGear/data/Aircraft/missile目录下。文中导弹模型名称为missile,指定弹体模型的配置文件如下:
<sim>
<model>
<path>Aircraft missile/Models/missile.xml</path>
</mode>
</sim>
5 飞行仿真的实现及数据记录
首先需要将建立好的导弹的AC3D模型以及XML配置文件拷贝到FlightGear的Aircraft文件夹下。运行Matlab,在命令窗口栏输入dos(‘runfg.bat&’)命令,就可以进入FlightGear仿真界面。在Simulink模块中运行已经建立的系统仿真模型,就可以在FlightGear界面查看导弹实时的飞行过程,如图4所示。结果显示该模型能精确地显示导弹飞行过程中姿态与轨迹的变化。Flight⁃Gear还提供了飞行数据记录的功能,在FlightGear启动后,开启日志记录功能,可以选择需要的数据进行保存。

图4 仿真飞行过程中三维实时图Fig.4 Process of 3D real⁃time flight simulation
6 结论
本文介绍了一种高效便捷的导弹飞行姿态与轨迹实时模拟仿真方法。利用Matlab/Simulink编程工具建立了直观便捷的动态矩阵式Simulink仿真模型,依靠功能丰富的Simulink模块,方便地实现了数据的处理、分析与传递。FlightGear提供了一个逼真的仿真环境,接收数据并可实时显示导弹飞行过程中姿态与轨迹的变化。本文将两者相结合,建立了一扩展性好、通用性强的实时交互式的仿真系统,该系统对于导弹姿态与轨迹的可视化研究具有重要意义。
[1]苏建刚,付梦印.仿真在制导兵器试验与鉴定中的应用[J].火力与指挥控制,2007,32(5):4⁃7.SU Jian⁃gang,FU Meng⁃yin.The application of simulation to the test and evaluation of guided weapons[J].Fire Con⁃trol&Command Control,2007,32(5):4⁃7.
[2]洪蕾.导弹飞行仿真可视化系统研究与实现[J].弹箭与制导学报,2007,27(3):91⁃94.HONG Lei.Research and implementation of missile flightvisual simulation[J].Journal of Projectiles,Rockets,Missiles and Guidance,2007,27(3):91⁃94.
[3]王立波,张复春,高文琦,等.基于FlightGear飞行仿真软件数据的采集与处理[J].电子设计工程,2011,19(24):53⁃57.WANG Li⁃bo,ZHANG Fu⁃chun,GAO Wen⁃qi,et al.Data acquisition and processing based on FlightGear simu⁃lator software[J].Electronic Design Engineering,2011,19(24):53⁃57.
[4]张勇,李亮.基于Simulink和FlightGear的飞行器可视化飞行仿真[J].职大学报,2014(4):100⁃103.ZHANG Yong,LI Liang.Flight visual simulation based on Simulink and FlightGear[J].Journal of the Staff and Worker's University,2014(4):100⁃103.
[5]黄华,徐幼平,邓志武.基于FlightGear模拟器的实时可视化飞行仿真系统[J].系统仿真学报,2007,19(19):4421⁃4423.HUANG Hua,XU You⁃ping,DENG Zhi⁃wu.Real⁃time visualflightsimulationsystembasedonFlightgear simulator[J].Journal of System Simulation,2007,19(19):4421⁃4423.
[6]辛长范.基于Simulink中3DOF运动方程模块的外弹道仿真模型[J].弹箭与制导学报,2005,25(S1):179⁃180.XIN Chang⁃fan.The simulation model of mass point traj⁃ectory based on 3DOF motion block in simulink[J].Journal of Projectiles,Rockets,Missiles and Guidance,2005,25(S1):179⁃180.
[7]McCamish S B,Romano M.Simulations of relative multiple spacecraft dynamics and control with Matlab⁃Sim⁃ulink and satellite tool kit[C].AIAA Modeling and Simu⁃lation Technologies Conference and Exhibit,2007.
[8]辛长范.基于Simulink的质点外弹道模型仿真[J].火力与指挥控制,2004,29(6):39⁃40.XIN Chang⁃fan.The simulation of mass point trajectory based on Simulink[J].Fire Control&Command Control,2004,29(6):39⁃40.
[9]李新国,方群.有翼导弹飞行动力学[M].西安:西北工业大学出版社,2005. LI Xin⁃guo,FANG Qun.Winged missile flight dynamics[M].Xi'an:Northwestern Polytechnical University Press,2005.
[10]吴俊辉,杨勇,陈洪波,等.基于FlightGear重复使用运载器进场着陆视景仿真系统[J].导弹与航天运载技术,2014(6):50⁃53.WUJun⁃hui,YANGYong,CHENHong⁃bo,et al.Design of FlightGear⁃based visual simulation system for reusable launch vehicle approaching&landing[J].Missiles and Space Vehicles,2014(6):50⁃53.
[11]张龙,赵志勤,刘晓蕾,等.基于FlightGear的制导弹药飞行实测数据可视化研究[J].火炮发射与控制学报,2014,35(1):92⁃96.ZHANG Long,ZHAO Zhi⁃qin,LIU Xiao⁃lei,et al.Flight test data visualization research on flight course of guided munition based on FlightGear[J].Journal of Gun Launch&Control,2014,35(1):92⁃96.
[12]孟秀云.导弹制导与控制系统原理[M].北京:北京理工大学出版社,2003.MENG Xiu⁃yun.Principle of missile guidance and control system[M].Beijing:Beijing Institute of Technol⁃ogy Press,2003.
[13]徐海亮.全数字飞行仿真平台构建的研究[D].东南大学,2011.XU Hai⁃liang.Research on construction of full digital flight simulation platform[D].Southeast University,2011.
[14]刘鹏.基于FlightGear的无人直升机飞行仿真技术研究[D].南京航空航天大学,2011.LIU Peng.Research on flight simulation technology of unmanned helicopter based on FlightGear[D].Nanjing University of Aeronautics and Astronautics,2011.
[15]于琰平.基于FlightGear的四旋翼无人机三维可视仿真系统研究[D].天津大学,2010.YU Yan⁃ping.3D visual simulation system for quadrotor unmanned aerial vehicles based on FlightGear[D].Tianjin University,2010.
[16]Mueller R A.Optimizing the performance of pilot control loaders at NASA vertical motion simulator[J].Journal of Aircraft,2010,47(2):682⁃693.
Missile Flight Attitude and Trajectory Visualization System Using Matlab/FlightGear
HUANG Jin⁃yang1,XIN Chang⁃fan1,MA Yun⁃jian1,JIA Yi⁃xian1,BAI Dun⁃zhuo2
(1.School of Mechatronics Engineering,North University of China,Taiyuan 030051;2.Yuxi Industries Group Co.,Ltd.,Nanyang 473000)
According to the matrix kinematics equations of the six degree of freedom of the missiles,the nonlinear six degree of freedom matrix flight dynamics model of missile was constructed by using the Matlab/Simulink programming tool.The AC3D software was used to set up the 3D physical model of the missile,and the object name was set up to the specified location,and then it is imported into the FlightGear.Finally,the simulation data of Simulink is transmitted to FlightGear through the data interface,which can control the flight attitude and trajectory of the missiles and display real⁃time display in FlightGear.The visual simulation can provide a convenient method for the visualization of the missiles.
visualization;flight dynamics;FlightGear;Matlab
TJ765
A
1674⁃5558(2016)01⁃01246
10.3969/j.issn.1674⁃5558.2016.06.005
2016⁃03⁃04
黄金阳,男,硕士,研究方向为制导、控制与仿真。