地磁导航技术研究进展
2016-12-15孙晓洁张笑楠
孙晓洁,寇 军,张笑楠,李 洁
(北京航天控制仪器研究所,北京100039)
地磁导航技术研究进展
孙晓洁,寇军,张笑楠,李洁
(北京航天控制仪器研究所,北京100039)
地磁场是地球的固有资源,利用地磁场匹配进行导航是一种新型导航技术。与传统的惯性导航和卫星导航比较,地磁导航具有无积累误差、抗干扰、隐蔽性好、导航信息丰富等优势。文章介绍了地磁导航的3个基本要素,即磁场测量技术、地磁模型以及定位与导航技术。分析了弱磁场磁力仪在地磁导航中的应用及其优缺点,讨论了地磁场模型和地磁匹配算法,展望了地磁导航技术的应用前景。
地磁导航;磁场测量;地磁模型;地磁匹配定位
0 引言
地磁场是在地球周围存在的天然磁场。虽然它看不见摸不着并且非常微弱,但却与人类的生活息息相关,因此人们很早就发现和利用了地磁场。东汉学者王充在《论衡》中就介绍了一种最原始的磁场测量仪器——司南,其后来发展成为现代指南针。北宋科学家沈括在《梦溪笔谈》中最早记载了地磁偏角,很多装置都是利用磁偏角定向的。
经过漫长的探索和积累,人们逐渐认识到地磁场是地球的固有资源,它由不同起源、不同变化规律的磁场成分叠加而成。基于高斯球谐函数的地磁场模型表明地球近地空间内任意一点的磁场矢量与该点的地理经纬度和离地心的高度是一一对应的[1⁃3]。可见,地磁场为航空、航天、航海以及海下航行提供了天然的导航资源,其应用已不再局限于导航车、指南针和水罗盘,在更广阔的导航领域有了新的应用前景。
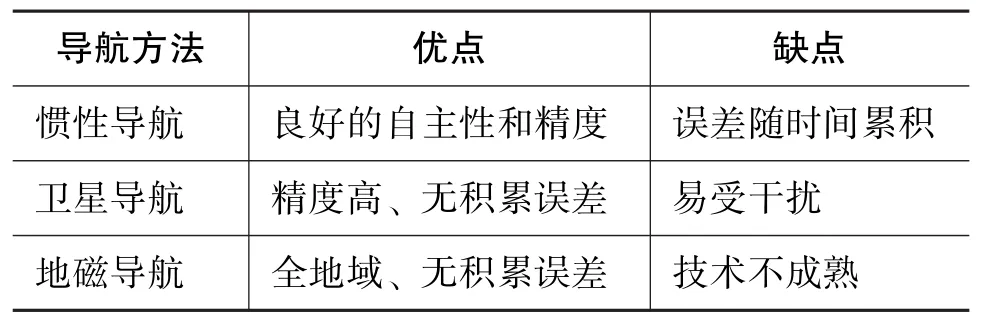
表1 3种导航方法的比较Table 1 Characteristic of three kinds of navigation technology
具体来说,地磁导航具有以下优势:
1)地磁测量不受位置和环境的影响,是实现全天候、全地域导航的基础;
2)地磁测量不会有电磁信号的泄露,隐蔽性好;
3)采用匹配定位方法,导航误差不会随时间产生累积;
4)地磁场为矢量场,相较于地形匹配等标量数值匹配,可以提供更为丰富的导航参考信息。
地磁导航系统能有效弥补现有导航方法的不足,成为未来导航的新方向。同时,将地磁导航技术与其他导航技术组合使用,利用地磁匹配定位误差的有界性,可以获得长航时高精度的导航结果[4⁃6]。
1 国内外研究进展
利用地磁信息进行导航古而有之,指南针和航海罗盘提供的磁偏角可以精确定向。近代地磁导航的发展得益于磁场测量仪器的突破和人们对地磁场更深入的研究。20世纪60年代,美国E⁃systems公司研究了以地磁异常场为基础进行等值线匹配的MAGCOM系统[7]。但直到1976年,苏联Ramenskoye公司才通过实测地磁数据离线实验了MAGCOM导航方法[8]。20世纪80年代,瑞典的Lund学院利用地磁异常测速定位的方法对地磁导航的有效性进行了海上试验。2003年,美国国防部下达的军事关键技术相关列表中提到了地磁导航的数据参考系统,并且研发出了纯地磁导航系统。当前,美、英联合研制世界地磁模型用于实现空间和海洋的磁自主导航。
1.2.2 AFC测定 选择经阴道超声检测AFC,使用西门子公司的SSD3500型超声诊断仪,配有3~5 MHz阴道探头。使探头的扫描面向前,在阴道穹窿部获得卵泡最大切面的信息,使用探头全方位整体性的扫描卵巢,取同一平面上的两条互相垂直的最大径线,对卵泡边缘进行测量,计算在左右卵巢中直径介于2和10 mm之间的总卵泡数,数据纳入AFC计数。测量误差低于5%。
近年来,我国在地磁场测量和地磁导航技术方面也获得了快速发展。国家地震局的地球物理研究所每5年公布一次最新的国家地磁图,这是开展地磁导航技术研究的基础。2003年,中国航天研究人员采用自研磁力仪利用平均绝对差法进行地磁匹配定位实验,得到的分辨率达到50m。2007年,西北工业大学进行了惯性/地磁导航的仿真实验,利用磁偏角、磁倾角和地磁场强度等多种信息来完成位置匹配[9⁃10]。国防科技大学研制了惯性/地磁组合导航系统样机,并于2008年、2009年和2011年进行了车载试验、水面搭载试验和水下搭载试验,他们对相关匹配结果采取逐点匹配的策略,逐渐修正位置误差,再迭代该过程,从而实现精确定位。在地磁导航技术方面,我国虽然取得了一些进展,总体来说与国外水平还有较大差距,具体体现在:
1)高精度的地磁场测量仪器与国外至少差了一个数量级。最新的德国光技术研究所研制的微小型原子磁力仪灵敏度达到0.2pT/Hz1/2,而国内有报道的国土资源航空物探遥感中心研制的氦光泵磁力仪灵敏度达到2.5pT/Hz1/2[3]。这种高精度磁传感器属于禁运设备,必须依靠技术积累,设计和研制具有自主知识产权的产品。
2)用于地磁导航的高分辨率地磁模型和地磁图。国际地磁参考场IGRF描述的中国地区地磁场偏差在100nT,这么大的等值线间隔是无法完成高精度地磁导航的。中国地震局地球物理研究所与多家地震局单位共同承担了全国地磁测量、地磁场模型研究与中国地磁图的编绘工作,并每5年时间更新一次,模型精度为水平分量104.4nT,北向分量103.3nT,垂直分量123.9nT。随着航磁技术的改进,航磁图的等值线间隔将提高到0.1nT,这种磁场测绘量是巨大的,目前我国还没有完成这项工作。
3)有效的地磁匹配定位导航算法。美国国防部声称他们研制的纯地磁导航系统地面和空中的定位精度为30m,目前我国未见有超过此指标的报道。虽然地磁导航算法可以借鉴许多图像匹配、地形匹配算法,但由于地磁测绘的特点,这些算法在地磁导航领域受到很大的局限性,需要对相关算法的缺陷进行研究与分析,将影响算法的初值精度进行提高,或采取多种算法相结合的方式进行互补。地磁定位精度的提高不能被简单地局限于磁传感器的设计与改进,实用高效的地磁匹配定位导航算法也是一项关键性技术问题。
2 地磁导航的关键技术
地磁导航技术的研究涉及地球物理学、电磁学、精密仪器、地理信息系统、导航与控制等多个学科,需要多学科交叉与融合。完成地磁导航需要知道当前点地磁信息,基准地磁图和匹配算法,因此地磁导航的关键技术包括:磁场测量技术、地磁模型以及定位与导航技术。
2.1 磁场测量技术
实现地磁导航的基本条件是能够精确地获取地磁场的幅值与方向等信息。地磁场测量属于弱磁测量领域,其幅值范围在30000nT~70000nT。地磁平缓区域的磁场梯度变化只有几nT,要测量如此微小的变化量无疑对磁传感器的分辨率提出了很高要求,因此磁场传感器的设计与制作是一项关键技术。
主要应用的弱磁传感器有:磁通门磁力仪、质子旋进磁力仪、光泵磁力仪、超导量子干涉磁力仪、原子磁力仪等[11⁃14],这几种磁力仪的优缺点比较如表2所示。目前,在无人机航空物探中较多地使用光泵磁力仪,比如英国MagSurvey、荷兰Fugro使用的CS⁃3铯光泵磁力仪,中船重工715所的GB⁃10氦光泵磁力仪和航遥中心的HC2000氦光泵磁力仪。

表2 5种典型磁力仪的比较Table 2 Comparison of five magnetometers
需要指出的是,磁场测量不仅取决于磁传感器本身的性能指标,干扰磁场的排除也是一个重要影响因素。一般来说,对于载体电磁设备辐射出来的干扰场采用磁屏蔽和滤波技术解决,对于受地磁场影响产生的同姿态相关的干扰场采用磁补偿方式,通过建立模型、求解参数、进而反向补偿的方法来解决。以无人机航空物探系统常采用的CS⁃3铯光泵磁力仪为例,仪器本身的噪声水平是2pT@10Hz,经航磁补偿后在荷兰Fugro系统中实测总精度可以达到1.5nT,在我国物化探所系统中的实测总精度为1.65nT。
2.2 地磁模型
获取地磁模型首先要进行磁场测绘,即利用磁场测量仪器测量和存储全球或区域磁测点磁场信息和位置信息。常用的磁场测绘方法包括地面站观测、航空磁测、海洋磁测和卫星磁测。卫星磁测的优势在于短时间内获得大尺度范围的全球磁场资料,既可以用来建立主磁场模型,也可以用来研究磁异常分布。
磁场测绘具有如下特征:1)只能沿着测绘载体运行轨迹获取“线图”形式的测绘结果;2)测绘密度大,在同一位置上需对不同海拔高度进行重复测绘。针对以上特征,要想获得更密集的磁场数据,在同一高度时采用磁场插值的方法,通过已有磁测点的数据来对未知磁测点的信息进行推测;在不同高度时采用磁场延拓的方法,填补测绘中产生的海拔高度真空带。
从模型上考虑,地磁场的场强B(r,t)由3部分组成:

其中,Bm(r,t)为主磁场,也称正常场,源于地核,占地磁场组分的95%以上,变化缓慢;Bc(r)为异常场,源于磁化的地壳岩石,占地磁场总量的4%以上,呈区域分布,几乎不随时间变化;Bd(r,t)为干扰磁场,源于磁层和电离层,时间变化剧烈。比较著名的地磁场模型如表3所示,这些地磁模型在地质学研究、卫星的磁场导航方面具有一定的参考价值。地磁场模型和地磁图是实现地磁导航的基础与工具。基本可以认为,在一个较长的时期,异常场和正常场只是空间位置的函数,受时间变化影响较小,是地磁导航中可以利用的主要元素。
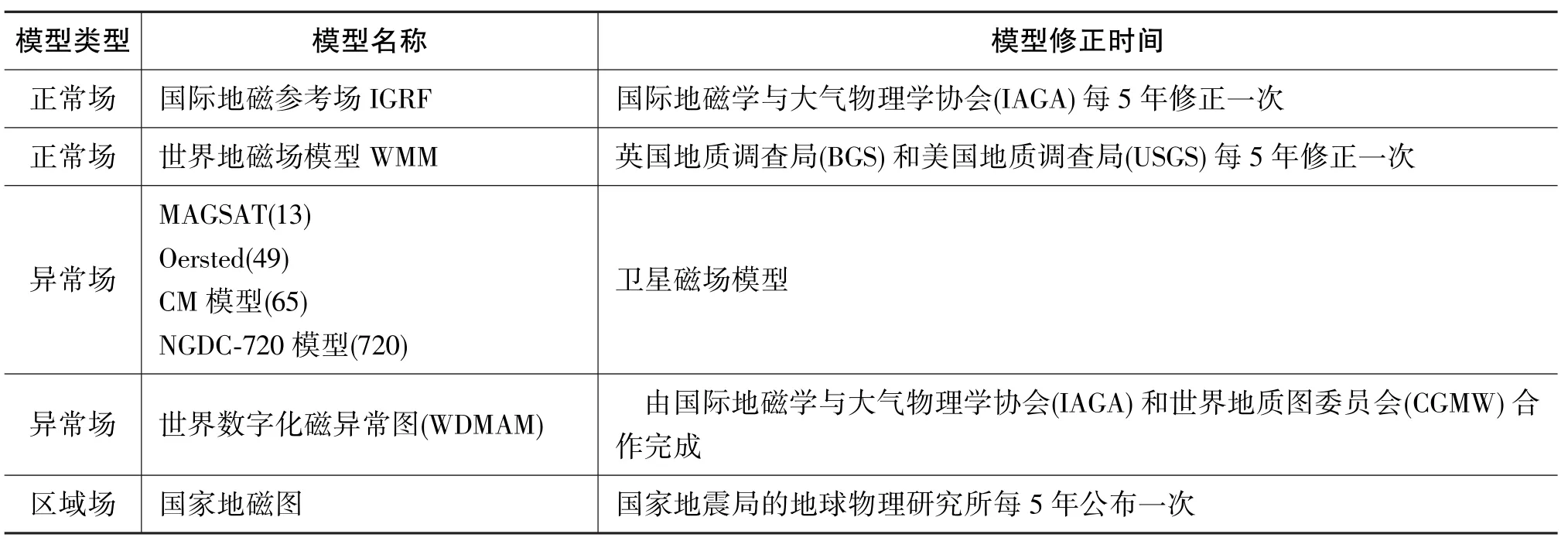
表3 部分地磁场模型Table 3 Geomagnetic models
2.3 定位与导航技术
地磁场各要素绘制出的等值线图叫地磁图,地磁匹配定位就是利用地磁图进行导航定位的过程,它是一种基于数据库参考的导航方法。目前,地磁匹配定位受地磁场模型分辨率、地磁测量精度等因素的制约,只能达到百米级定位精度。因此采用将惯导与地磁匹配定位组合的方式,在惯导提供的位置参考信息基础上,将测得的地磁序列与预存的地磁模型进行相关性匹配,从而确定目标的真实位置,实现高精度导航。
在地磁匹配定位方法中,需要包含地磁探测模块和地磁数据库模块,如图1所示。地磁探测模块由磁力仪和数据处理部分组成,用于向导航系统提供精确的实时测量地磁序列;地磁数据库模块由地磁模型和数据提取部分组成,用于向导航系统提供地磁基准数据。
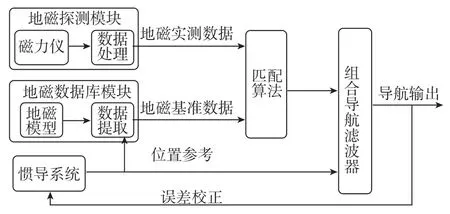
图1 地磁匹配定位导航原理图Fig.1 Schematic diagram of geomagnetic matching
地磁匹配算法就是将实测地磁数据与基准数据进行匹配以获得载体当前位置。如前文所述磁场测绘的特征,导致地磁匹配算法只能使用载体轨迹上的测量点与导航数据库进行匹配,即只能进行“线图”匹配而无法进行大面积图像匹配,这也是地磁匹配的固有特征,因此使得许多传统的图像匹配、地形特征匹配方法在地磁导航领域受到很大的局限而难以应用。表4总结了在地磁匹配算法中,度量实测地磁序列和基准数据库中任一子序列的相似性程度的多种算法。
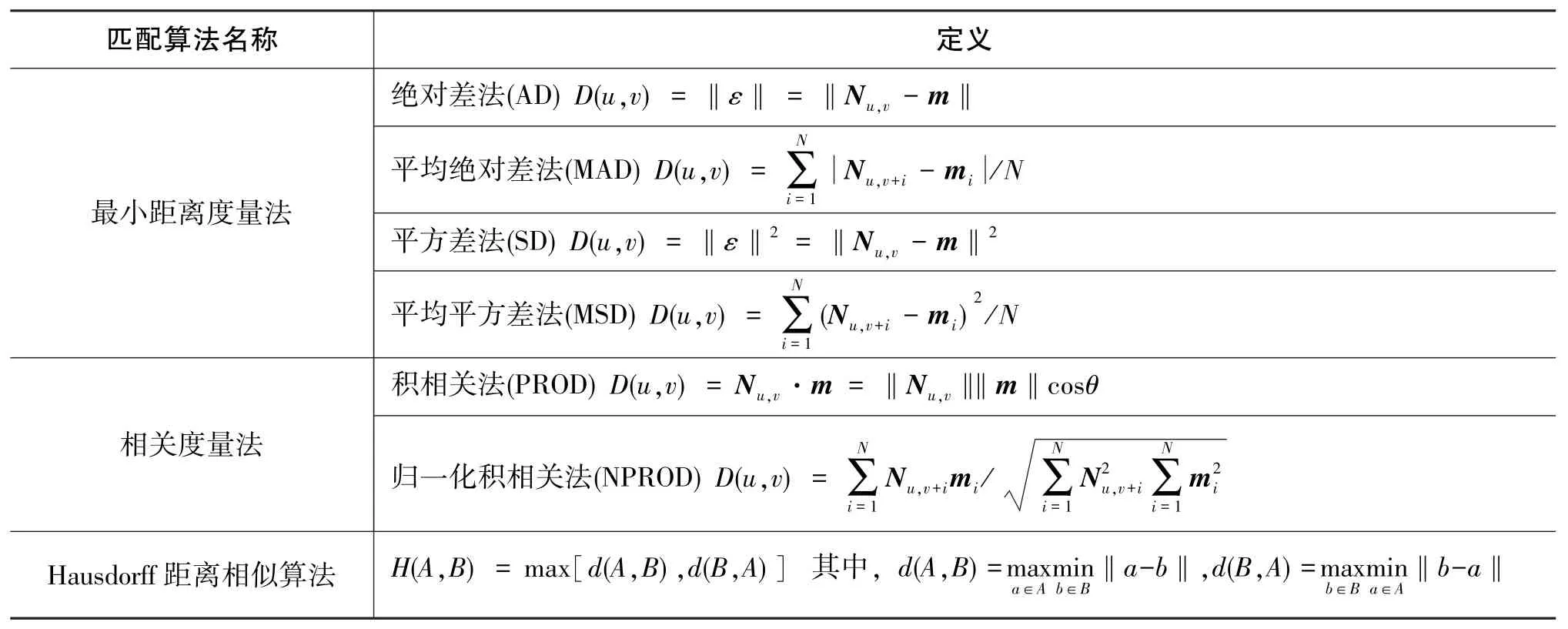
表4 地磁匹配算法比较Table 4 Comparison of geomagnetic matching algorithms
表4中的符号说明如下:Nu,v表示位置(u,v)上的基准子序列的N维特征向量,m表示实测的N维特征向量,N表示相关数据的总点数,D(u,v)为地磁匹配相关函数,Nu,v+i表示基准数据库的第(u,v+i)个特征量,mi表示实测地磁数据的第i个特征量。
2006年,Goldenberg F利用磁力仪测量地磁场值,再与存储的地磁异常图进行匹配,从而得到精确的导航信息,证明了在飞机上利用地磁匹配的可能性。2008年谢仕民等用平均绝对差法(MAD)、平均平方差法(MSD)、归一化积相关法(NPROD)和Hausdorff距离相似算法(HD)进行了匹配算法比较。从匹配精度的角度,MAD和MSD优于NPROD和HD;从运算量角度,MAD<MSD<NPROD<HD,HD算法的稳定性较好。
3 结论
本文介绍了地磁导航的概念、国内外研究现状及关键技术,总结了在磁场测量技术、地磁模型和定位与导航技术方面的进展。可以看到,地磁导航技术还有诸多难题需要深入解决,比如高精度磁传感器的研制、载体干扰磁场的补偿、高精度地磁数据库的获取、匹配算法的研究等。这就需要积极开展地磁导航关键技术的研究,特别是在相关领域已经取得一些成果的研究院所和高校,充分发挥前期的技术优势,既要改进和优化现有技术,又要注重新工艺新方法的应用,努力缩短在地磁导航领域与国外的差距,甚至赶超国外,更好地利用地磁信息提高定位导航精度。
[1]胡小平,吴美平.水下地磁导航技术[M].北京:国防工业出版社,2013.HU Xiao⁃ping,WU Mei⁃ping.Technologies on underwater geomagneticfieldnavigation[M].Beijing:National Defense Industry Press,2013.
[2]张昌达,董浩斌.重力和磁力勘探进入新时期[J].物探与化探,2010,34(1):1⁃6.ZHANG Chang⁃da,DONG Hao⁃bin.A new development period of the gravity and magnetic exploration[J].Geo⁃physical&Geochemical Exploration,2010,34(1):1⁃6.
[3]寇义民.地磁导航关键技术研究[D].哈尔滨工业大学,2010.KOU Yi⁃min.Research of key technologies in geomagnetic navigation[D].Harbin Institute of Technology,2010.
[4]赵国荣,黄婧丽,胡正高.地磁辅助惯性组合导航技术分析[J].系统仿真技术,2013,9(2):119⁃123.ZHAO Guo⁃rong,HUANG Jing⁃li,HU Zheng⁃gao.Geo⁃magnetic aided inertial navigation technical analysis[J].System Simulation Technology,2013,9(2):119⁃123.
[5]傅慷,余杰,钱富.地磁导航的相关技术研究[J].船电技术,2013,33(4):31⁃33.FU Kang,YU Jie,QIAN Fu.Study on geomagnetic navi⁃gation[J].Marine Electric&Electronic Engineering,2013,33(4):31⁃33.
[6]李婷,张金生,王仕成,等.基于组合算法的地磁匹配导航航迹规划[J].计算机仿真,2014,31(12):75⁃78.LI Ting,ZHANG Jin⁃sheng,WANG Shi⁃cheng,et al.Ge⁃omagnetic matching navigation route planning based on combinational algorithm[J].Computer Simulation,2014,31(12):75⁃78.
[7]周军,葛致磊,施桂国,等.地磁导航发展与关键技术[J].宇航学报,2008,29(5):1467⁃1472.ZHOU Jun,GE Zhi⁃lei,SHI Gui⁃guo,et al.Key technique and development for geomagnetic navigation[J].Journal of Astronautics,2008,29(5):1467⁃1472.
[8]Goldenberg F.Geomagnetic navigation beyond the magnetic compass[C].PLANS2006,SanDiego,California:684⁃694.
[9]李素敏,张万清.地磁场资源在匹配制导中的应用研究[J].制导与引信,2004,25(3):19⁃21.LI Su⁃min,ZHANG Wan⁃qing.Study on the application of geomagnetic field contour in matching guidance[J].Guid⁃ance and Fuze,2004,25(3):19⁃21.
[10]董昆,周军,葛致磊.基于地磁场的新型导航方法研究[J].火力与指挥控制,2009,34(3):153⁃155.DONG Kun,ZHOU Jun,GE Zhi⁃lei.A new navigation method based on geomagnetic field[J].Fire Control and Command Control,2009,34(3):153⁃155.
[11]赵敏华,吴斌,石萌,等.基于三轴磁强计与雷达高度计的融合导航算法[J].宇航学报,2004,25(4):411⁃415.ZHAO Min⁃hua,WU Bin,SHI Meng,et al.Satellite au⁃tonomous orbit determination using magnetometers and radar altimeter[J].Journal of Astronautics,2004,25(1):411⁃415.
[12]张扬.铯磁力仪与载体匹配技术研究[D].哈尔滨工程大学,2012.ZHANGYang.Thestudyofmatchingtechnology between Cs magnetometer and vehicle[D].Harbin Engi⁃neering University,2012.
[13]刘国宾,孙献平,顾思洪,等.高灵敏度原子磁力计研究进展[J].物理,2012,41(12):803⁃810.LIU Guo⁃bin,SUN Xian⁃ping,GU Si⁃hong,et al.Pro⁃gressinhighsensitiveatomicmagnetometers[J].Physics,2012,41(12):803⁃810.
[14]陈斌,顾左文,高金田,等.2005.0年代中国地区地磁场及其长期变化球冠谐和分析[J].地球物理学报,2011,54(3):771⁃779.CHEN Bin,GU Zuo⁃wen,GAO Jin⁃tian,et al.Analyses of geomagnetic field and its secular variation over China for 2005.0 epoch using spherical cap harmonic method[J].Chinese Journal of Geophysics,2011,54(3):771⁃779.
Research Progress in Geomagnetic Navigation
SUN Xiao⁃jie,KOU Jun,ZHANG Xiao⁃nan,LI Jie
(Beijing Institute of Aerospace Control Devices,Beijing 100039)
Geomagnetic field is the natural resource surrounding the earth,and geomagnetic navigation is a novel navigation technology.Compared with the inertial navigation and the satellite navigation,the geomagnetic navigation has advantages of no error accumulation,strong anti⁃interference,good concealment and rich information.In this paper,we in⁃troduce three key factors in geomagnetic navigation,namely the measurement method for magnetic field,the geomagnetic model and the method for positioning and navigation.The application in geomagnetic navigation and the characteristic of magnetometer are analyzed.The geomagnetic model and the navigation arithmetic are discussed in detail.It is shown that the geomagnetic navigation is a promising navigation technology and has wide market in the future.
geomagnetic navigation;magnetic field measure;geomagnetic model;geomagnetic matching
TP29
A
1674⁃5558(2016)07⁃01317
10.3969/j.issn.1674⁃5558.2016.06.001
2016⁃09⁃01
孙晓洁,女,博士,工程师,研究方向为原子磁力仪。