一种简化的车载自适应组合导航算法
2016-12-14刘鹏飞智奇楠王青江马国驹王立兵
刘鹏飞,智奇楠,王青江,马国驹,王立兵
(1.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081;2.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;3.中国人民解放军63961部队,北京 100012)
一种简化的车载自适应组合导航算法
刘鹏飞1,2,智奇楠1,2,王青江1,2,马国驹1,2,王立兵3
(1.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081;2.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;3.中国人民解放军63961部队,北京 100012)
为解决复杂路况下车载组合导航系统存在的卫星导航系统信号衰弱、断续导致信号观测性差和组合滤波器稳定性下降甚至发散等问题,采用了一种简化的、易于工程实际应用的车载自适应组合导航算法,利用数据检测方法对卫导原始观测数据进行评估,根据评估结果构造自适应滤波因子,实时更新滤波器量测噪声协方差阵,提高滤波器对观测信息变化的适应能力。通过实际动态跑车试验,表明这种简化的自适应组合导航算法在卫导信号断续情况下,仍能保证3 m(RMS)的定位精度、0.04 m/s(RMS)的测速精度,较常规Kalman滤波定位精度提高近30%,测速精度提高达70%,能满足城市、山区等恶劣场景下车载导航的需求。
车载导航;组合导航;自适应滤波;量测噪声协方差阵
0 引言
地面导航装备是陆用主战武器的主要作战保障单元,现代意义地面战争要求车辆能够在复杂恶劣电磁地域环境下具备灵活性、机动性及快速投入战场的适应性能力,并能为武器发射平台提供精确的位置信息和姿态基准,这就对车载导航系统提出了更高的要求[1]。无线传感器网络节点的定位算法[2-3]、基于Taylor级数展开的改进定位算法[4]以及基于交互多模卡尔曼滤波器的定位算法[5]等技术的研究,都在一定程度上促进了车载导航系统的发展。
车载导航通常为组合导航系统,由惯性导航系统(INS)和卫星定位系统(GNSS)组成。在组合导航信号仿真模拟[6]、组合导航测试评估[7]方面也受到了越来越多的关注;车载组合导航在城市高楼区、林荫道和隧道内等复杂环境下,GNSS信号衰弱、断续,直接导致组合滤波器估计精度降低甚至滤波发散,这就面临着组合导航滤波器量测噪声统计特性不确定的问题。为解决此类问题,通常采用Sage-Husa自适应滤波技术,文献[8]提出一种根据极大似然准则的自适应卡尔曼滤波算法;文献[9]对标准Sage-Husa自适应滤波进行了简化变形;文献[10]则对一种最优自适应滤波算法进行了研究;文献[11]针对陆用车载组合导航系统研究了自适应滤波算法;不过上述算法在实际应用仍存在诸多问题:噪声统计特性估计不准确、算法复杂、计算量大、实时性差以及工程实现较困难。随后出现的改进、简化的Sage-Husa自适应滤波技术也都是利用滤波残差等对噪声统计特性进行估计,严重依赖滤波器状态量的估计精度,独立性差,不能很好地估计噪声统计特性。
本文给出的一种简化的自适应滤波方法,不依赖滤波残差等因素的影响,直接利用GNSS提供的量测信息与INS输出的导航信息,不断构造自适应滤波因子,实时修正量测噪声阵R,从而提高滤波估计精度和导航性能。
1 自适应组合滤波器的设计
车载自适应组合导航系统框图如图1所示。组合滤波器利用卫导系统提供的伪距/伪距率信息、惯导反算的伪距/伪距率信息进行量测更新。伪距/伪距率观测信息首先通过数据质量检测模块,通过判断观测数据质量的好坏来确定观测数据的统计特性,然后构造自适应滤波因子,同时计算出合理的量测噪声方差阵R,再将噪声方差阵R赋值给组合滤波器。组合滤波器将状态估计值反馈给INS,用来修正INS误差。同时INS还会为组合滤波器提供有效的运动约束信息,包括速度约束辅助信息以及航向辅助信息,提高滤波器的可观测性。

图1 车载自适应组合导航系统
1.1 状态方程的建立
系统状态方程中选取22维的状态量,分别为三维姿态角误差φ、三维速度误差δv、三维位置误差δp、三维陀螺零偏εb、三维加计偏置、俯仰安装偏差角αθ、航向安装偏差角αψ、捷联惯导中心到GNSS中心的三维杆臂误差δl、接收机钟差δtu以及接收机钟漂δtru:

(1)
状态方程中的姿态误差方程、速度误差方程以及位置误差方程可由捷联惯导系统误差方程得到,在此不再赘述。
陀螺零偏和加计偏置建模为一阶马尔科夫过程和白噪声的组合。
针对车载导航,组合导航系统充分利用车辆在行进过程中产生的运动约束条件(速度、高度信息等),尤其在无卫星导航信号环境下,为组合滤波器提供有效的观测信息。
稀土元素(RE)在元素周期表中处于第IIIB族,其大多数元素离子形式的特征价态为正三价态(RE3+)。一般来说,镧系元素(RE)在4f、5d和6s轨道都有电子分布,因而能出现大量的能级结构[1]。由于大部分稀土元素的4f能级组态基本类似,同时它们又都具有相同的原子结构。含有稀土离子的化合物具有独特的化学性质和物理特性,在各个领域都有着广泛的应用,其中在光电传感元件等领域的应用尤为广泛[2]。

(2)
使用车辆运动约束信息时,还应考虑到惯导系统在车辆安装时与卫导天线之间的杆臂效应。实际上,在系统运行过程中,杆臂会随着系统的震动或者形变而变化。通常情况下,杆臂误差一般是由于系统机械部件的物理形变引起的,这些物理形变基本上都是低频的,因此实际应用中,将杆臂误差建模为时间常数为无穷大的随机常数过程,满足以下微分方程:
(3)
1.2 量测方程的建立

车体坐标系速度Vm可表示为:

(4)

(5)
对式(4)进行微分可得:
Μ1φ+M2δVn+M3α。
(6)

(7)
式中,M1(1,×)表示矩阵M1的第1行;M3(1,3)表示矩阵M3的第1行3列的元素;
针对车载导航系统,高度信息也可为组合滤波器提供有效的观测信息[13]:
Zh=hins-href。
(8)
实际应用中,href为路面的参考高度值或经过滤波器修正后的有效高度值;hins为惯导输出的高度值。根据Zh可以很容易得到相应的量测矩阵Hh:

(9)
(10)


(11)
至此,系统量测方程可表示为:
Z=HX+V。
(12)
式中,


(13)
1.3 自适应滤波因子的计算




(14)

③ 当观测数据满足检验条件式(11)时,计算自适应滤波因子:

(15)
由自适应滤波因子构成的量测噪声矩阵R即可表示为:
(16)
式中,N为参与量测更新的卫星数目;R为对角阵。
2 跑车试验与分析
车载组合导航系统由中精度的光纤惯组和自研的多频多模卫星导航接收机组成,以高精度激光惯组和卫星导航接收机的组合导航结果作为参考基准。惯性器件主要技术指标如表1所示。
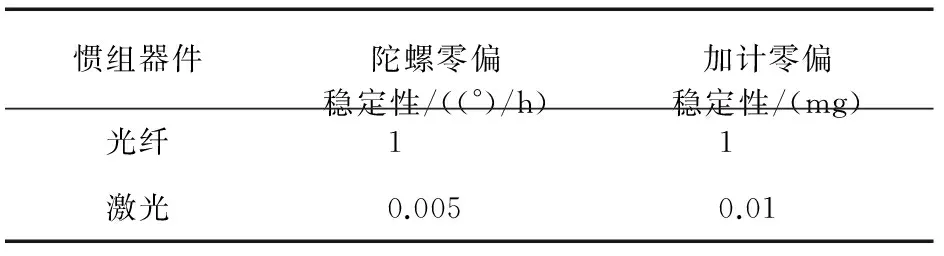
表1 惯组器件主要技术指标列表
试验地点选择在石家庄市区。试验环境复杂,车辆道路两旁树木、高楼对卫导信号遮挡较严重,卫导信号连续性较差,试验时长约2 500 s。
车辆的行驶轨迹图以及卫导信号中断时刻的轨迹图如图2所示。从图2中可以看出,西北方向路段以及东南路段西侧街道,卫导信号断续情况严重,经统计,卫导信号中断时间所占比例为31.1%。
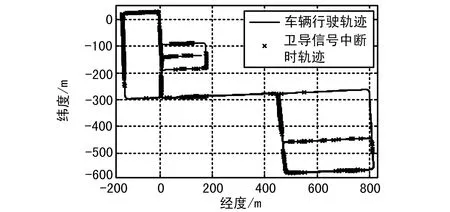
图2 车辆行驶轨迹和卫导信号中断时刻轨迹
自适应组合导航、常规组合导航的误差曲线如图3和图4所示。
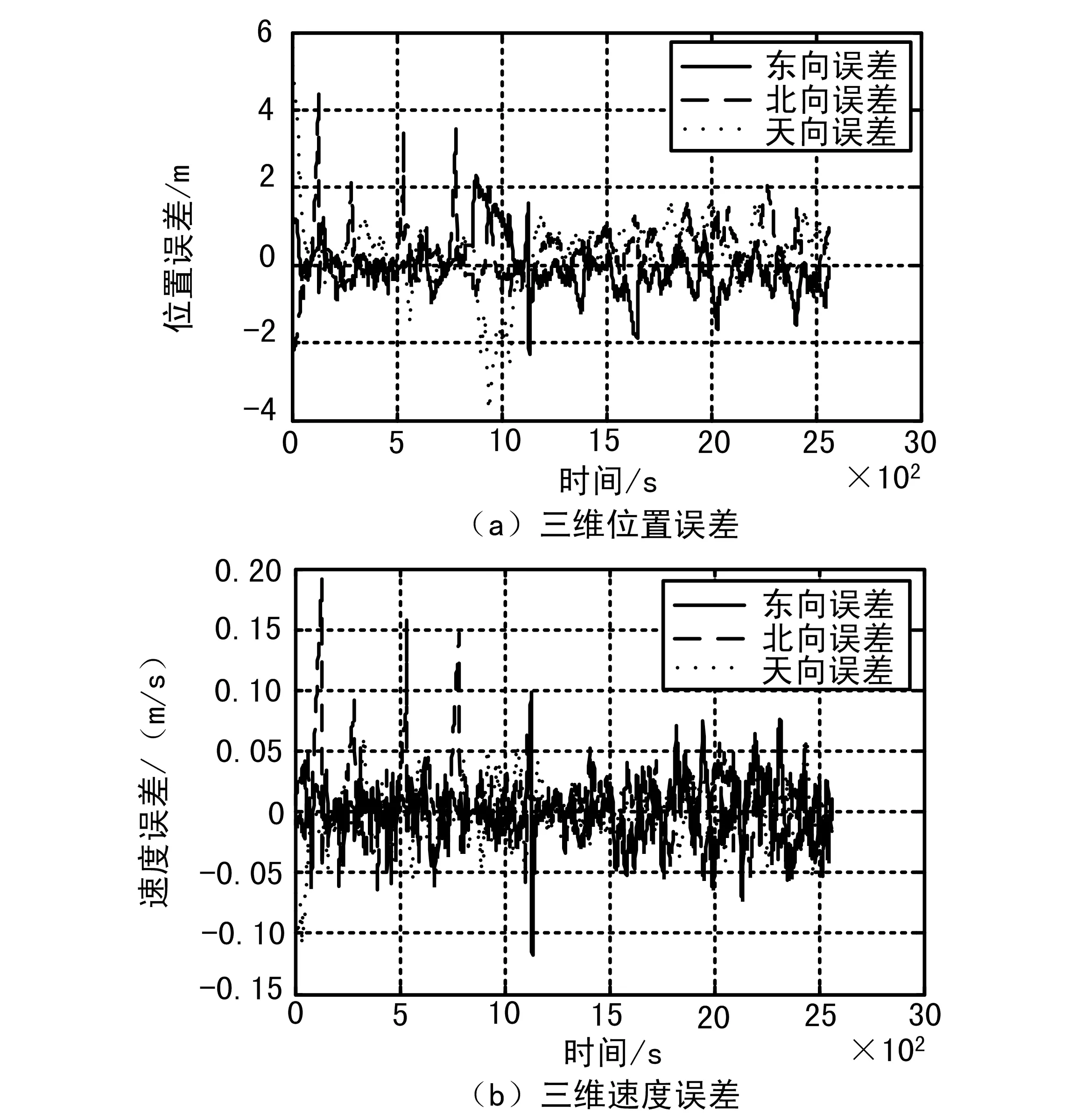
图3 自适应组合导航误差曲线
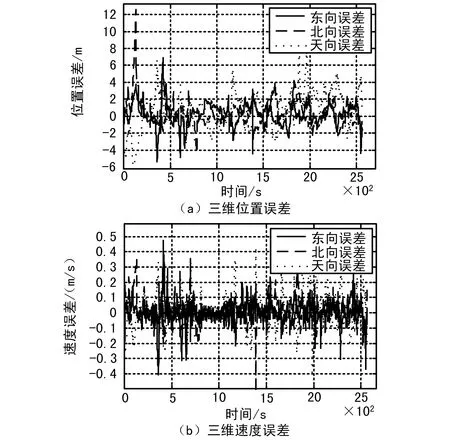
图4 常规组合导航误差曲线
由图4可以看出,常规组合导航的位置、速度误差要明显大于自适应组合导航的位置、速度误差,而且常规组合导航误差曲线的抖动变化要剧烈得多,不如自适应组合导航的误差曲线平滑集中,常规组合导航单向位置误差最大值已超过12 m,而自适应组合导航单向位置误差的最大值还未超过4.5 m;自适应组合导航单向速度误差最大值未超过0.2 m/s,而常规组合导航单向速度误差最大值已达到0.4 m/s,远远大于自适应组合导航。
不同组合导航类型下的导航精度统计值如表2所示,自适应组合导航定位精度要略优于常规组合导航;而测速精度要明显优于常规组合导航;从图3、图4以及表2可以得出:相对于常规组合导航来说,自适应组合导航对测速精度的提升要高于对定位精度的提升,即伪距率对应的自适应滤波因子对组合滤波器的影响要大于伪距对应的自适应滤波因子对组合滤波器的影响。
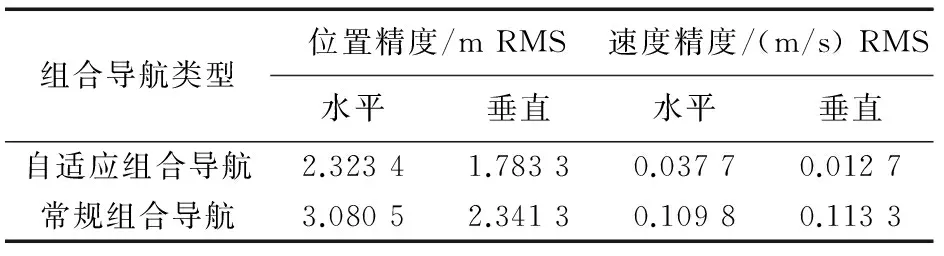
表2 不同组合导航类型下的导航精度统计表
伪距、伪距率观测量对应的自适应滤波因子随时间的变化曲线如图5所示。动态场景下,伪距对应的滤波因子随时间的变化不大,偶尔在某些时刻会有所变化,而伪距率对应的滤波因子随时间的变化很大,对动态环境更为敏感,即伪距率对应的滤波因子对自适应滤波器的导航精度起主要作用。图5滤波因子的变化曲线也进一步验证了表2、图3和图4导航精度的正确性。
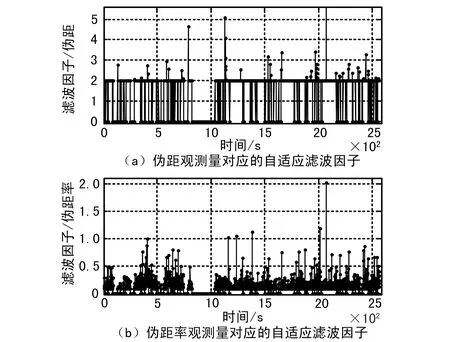
图5 伪距、伪距率观测量对应自适应滤波因子
3 结束语
针对复杂应用场景下卫导信号衰弱、断续的情况,本文研究了一种简化的车载自适应组合导航方法,利用GNSS提供的观测信息、INS输出的导航信息,在计算观测值的统计特性的基础上,给出了一种卫导信号质量好坏的检测方法,该方法能够有效利用卫星导航提供的观测信息,对观测质量较差的信息可进行及时的检测并且合理的剔除,最后给出了自适应滤波因子的计算公式。实际的跑车试验表明,接收机的原始伪距观测噪声在复杂动态环境下变化不大;而原始伪距率观测噪声在复杂动态环境下变化较显著,而文章所给出的伪距率自适应滤波因子能很好地反映动态复杂信号环境下伪距率的噪声变化水平及变化趋势,相对于伪距滤波因子,伪距率滤波因子对自适应组合滤波器导航精度的提高起决定性作用。当然,上述结论以及伪距残差阈值、伪距率残差阈值都是是在对中精度光纤惯组器件(陀螺精度:1°/h,加计精度:1 mg)与自行研制的接收机组成的组合导航系统研究测试的基础上得出的,针对不同的接收机以及不同精度惯组组成的组合导航系统,伪距残差阈值、伪距率残差阈值都需要根据卫导观测数据的统计特性以及惯性器件的噪声水平做适当调整:精度较高的惯导系统以及观测质量较好的卫导接收机,其对应的残差阈值应适当减小;精度较差的惯导系统以及观测质量较差的卫导接收机,其对应的残差阈值应适当增大,当然复杂的动态信号环境也会对阈值的选取产生影响。
[1] 付强文,秦永元,李四海,等.车辆运动约束辅助的惯性导航算法[J].中国惯性技术学报,2012,20(6):640-643.
[2] 王 琰,王 喆.无线传感器网络节点定位算法研究[J].无线电通信技术,2011,37(5):21-23.
[3] 林鑫海,李树磊,赵 研,等.无线传感器网络通信技术与标准化分析[J].移动通信,2014,38(24):42-45.
[4] 刘春红,战 美,陆萍萍.基于Taylor级数展开的改进定位算法研究[J].无线电通信技术,2012,38(6):48-51.
[5] 肖 宁,王 玫,雷延锋.基于交互多模卡尔曼滤波器的定位算法[J].无线电通信技术,2013,39(1):80-83.
[6] 刘子令,姚志成,范志良.卫星/惯性组合导航信号仿真器设计[J].无线电工程,2014,44(7):39-42.
[7] 周泓伯,孙 旭,叶红军.组合导航装备性能评估技术研究[J].无线电工程,2015,45(11):40-43.
[8] 郭 强,李岁劳,贾继超,等.无人机组合导航系统的自适应滤波研究[J].计算机仿真,2012,19(7):51-54.
[9] 杨 波,王跃钢,柴 艳.基于自适应滤波的飞艇组合导航系统研究[J].航天控制,2010,28(3):33-37.
[10] YANG Yuan-xi,GAO Wei-guang.An Optimal Adaptive Kalman Filter [J].Journal of Geodesy,2006(80):177-183.
[11] FAKHARIAN A,GUSTAFSSON T,MEHRFAM M.Adaptive Kalman Filtering Based Navigation:an IMU/GPS Integration Approach[C]∥Proc of 2011 International Conference on Networking,Sensing and Control,Delft:IEEE,2011:181-185.
[12] 王惠南.GPS导航原理与应用[M].北京:科学出版社,2003.
[13] SHIN Eun-Hun.Accuracy Improvement of Low Cost INS/GPS for Land Applications[D].Calgary:the Universityof Calgary,2001:78-80.
[14] ANGRISANO Antonio.GNSS/INS Integration Method[D].Calgary:The University of Calgary,2010.
刘鹏飞 男,(1987—),工程师。主要研究方向:惯性导航与组合导航技术。
智奇楠 男,(1983—),高级工程师。主要研究方向:惯性导航与组合导航技术。
A Simplified Adaptive Filter in Vehicle Integrated Navigation System
LIU Peng-fei1,2,ZHI Qi-nan1,2,WANG Qing-jiang1,2,MA Guo-ju1,2,WANG Li-bing3
(1.StateKeyLaboratoryofSatelliteNavigationSystemandEquipmentTechnology,ShijiazhuangHebei050081,China; 2.The54thResearchInstituteofCETC,ShijiazhuangHebei050081,China; 3.Unit63961,PLA,Beijing100012,China)
To solve the problem of worse GNSS (Global Navigation Satellite System) signal observation and decreased even diverged integrated filter stability caused by the signal attenuation and interruption for vehicle integrated navigation system in complex road environment,a simplified vehicle adaptive integrated navigation algorithm easily for engineering practical application was adopted.Raw GNSS observation data was evaluated by the data detection method,adaptive filter factor was constructed according to the evaluation results,filter measurement noise covariance matrix was updated in real time to improve the adaptive ability for the change of measurement information.According to actual vehicle moving field test,the simplified adaptive navigation system could guarantee a position accuracy of 3 m (RMS),and a velocity accuracy of 0.04 m/s (RMS).The position accuracy is improved nearly 30% and velocity accuracy is improved up to 70% in contrast with Kalman filter when GNSS signal was interrupted.This approach can satisfy vehicle navigation requirement in bad environment such as city,mountain area and so on.
vehicle navigation;integrated navigation;adaptive filter;measurement noise covariance matrix
10.3969/j.issn.1003-3106.2016.12.11
刘鹏飞,智奇楠,王青江,等.一种简化的车载自适应组合导航算法[J].无线电工程,2016,46(12):43-46,82.
2016-08-23
国家高技术研究发展计划(“863”计划)基金资助项目(ZX151450001,2013AA122105)。
TN967.1
A
1003-3106(2016)12-0043-04
