基于Matlab的伸缩臂叉装车静态稳定性分析
2016-12-13朱海天詹隽青李红勋
朱海天,詹隽青,贾 楠,李红勋,郑 鑫
(1.军事交通学院 研究生管理大队,天津300161;2.军事交通学院 国家应急交通运输装备工程技术研究中心,天津300161;3.75310部队,武汉430000)
● 基础科学与技术 Basic Science & Technology
基于Matlab的伸缩臂叉装车静态稳定性分析
朱海天1,詹隽青2,贾 楠2,李红勋2,郑 鑫3
(1.军事交通学院 研究生管理大队,天津300161;2.军事交通学院 国家应急交通运输装备工程技术研究中心,天津300161;3.75310部队,武汉430000)
运用特征矢量法,对三轮伸缩臂叉装车在静止状态下进行研究,求得静态稳定性应满足的条件。使用Matlab软件,建立伸缩臂叉装车数学模型,分析伸缩臂叉装车静止状态下稳定性能,为校验设计阶段伸缩臂叉装车稳定性提供一种方便快捷、准确有效的计算方法。
伸缩臂叉装车;Matlab;特征矢量法
伸缩臂叉装车稳定性是指在遭遇外界干扰时,能克服干扰而保持稳定行驶或者作业的能力,它是伸缩臂叉装车的重要性能指标之一。美国标准(ANSI/ITSDF B56.6—2005)规定使用平台试验法检验伸缩臂叉装车的稳定性,具体标准见表1。
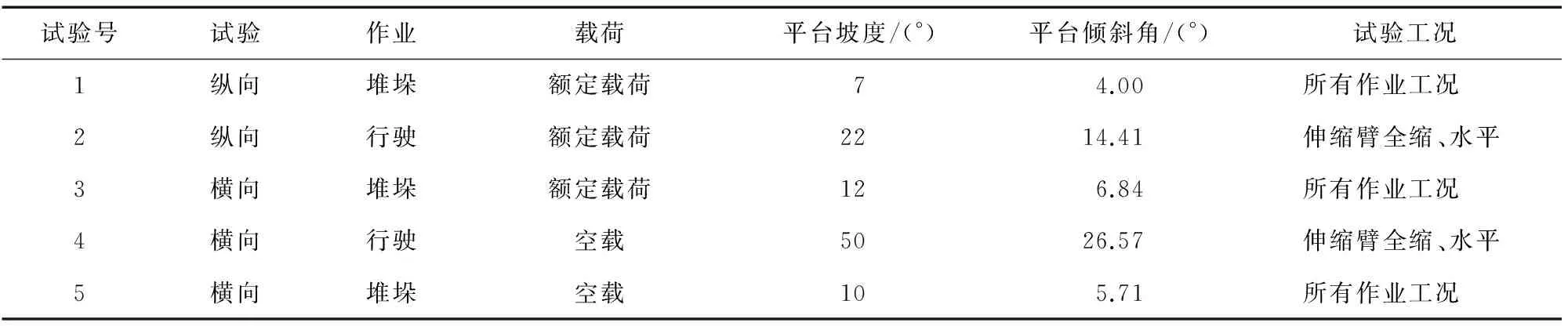
表1 倾斜试验台法
目前,三维建图软件技术已相当成熟,在三维软件中建立伸缩臂叉装车模型,对模型赋予材料属性,可以很快计算出伸缩臂叉装车质量以及伸缩臂叉装车重心位置。由于平台试验法条件要求苛刻,样机制造耗资巨大,且修改样机费时费力,因此,根据平台试验法的理论依据,本文试图在已知伸缩臂叉装车模型重心位置的情况下,运用Matlab软件计算出伸缩臂叉装车稳定范围,为伸缩臂叉装车稳定性检验提供一种方便快捷、准确有效的方法[1]。
1 伸缩臂叉装车稳定性校验
伸缩臂叉装车在作业中行驶速度较低,故在校验其稳定性时,略去它在弯道行驶时的离心力、制动时的惯性力以及加速度,简化为伸缩臂叉装车在静止状态下的稳定性问题。平台试验法中伸缩臂叉装车工况如图1所示[2]。

图1 伸缩臂叉装车各工况
1.1 伸缩臂叉装车倾覆分析
本文以某型号三轮伸缩臂叉装车为例,对其稳定性进行设计校核。
伸缩臂叉装车法向矢量示意如图2所示。连接重心与3个车轮的接地中心点、重心与车轮接地点形成“四面体稳定区”。过平面GAB、GBC和GAC,作平面法向矢量L1、L2和L3,指向外侧。l1、l2和l3为法向矢量L1、L2和L3在水平面上的投影。直线mn为坡底线,当需要增加倾斜平台坡度时,质心G的重心线便在垂直于mn且通过质心的平面内向坡底线转动。当重心铅垂线与平面GAB重合时,矢量L1方向为水平向量,伸缩臂叉装车处于向前纵向失稳状态,但由于伸缩臂叉装车向前翻倒时,前侧有货叉支撑,所以伸缩臂叉装车不会翻倒伤及乘员。

图2 伸缩臂叉装车法向矢量示意
1.2 失稳坡度角计算
特殊情况下,求出斜坡梯度线分别平行于l1、l2和l3时的失稳坡度角。
如图2所示,当梯度线平行于l2时,设B点坐标为(xb,yb,zb),G点坐标为(xg,yg,zg),C点坐标为(xc,yc,zc),则
L2=a2i+b2j+c2k
(1)
l2=a2i+b2j
(2)
可得方位角为
φL0=arctan(a2/b2)
(3)
向左边缘坡度角为
(4)
设梯度线不平行于l2时,伸缩臂叉装车有向左翻车的趋势时,此时,法向矢量L2与水平面相平行。如图3所示,在方位角为φ时,其失稳坡度角αL(φ)=∠QTP,则
(5)
(6)
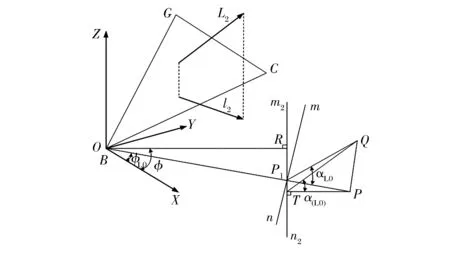
图3 伸缩臂叉装车系统向左倾覆示意
同理可得当系统有向右和向前倾覆倾向时,方位角φR0和φF0、边缘坡度角αF0和αR0以及伸缩臂叉装车向右失稳坡度角和向前的失稳坡度角随方位角的关系。
1.3 特殊方位角计算
当伸缩臂叉装车处于特殊方位角时,其横向失稳坡度角等于纵向失稳坡度角,可得
(7)
(8)
(9)
式中:φFL为叉装车有向前和向左倾覆倾向时临界方位角;φFR为叉装车有向前和向右倾覆倾向时临界方位角;φB为叉装车有向后倾覆倾向时方位角。
2 伸缩臂叉装车稳定性分析
联立式(1)—(9),总结以上各角度之间的内在联系,可得
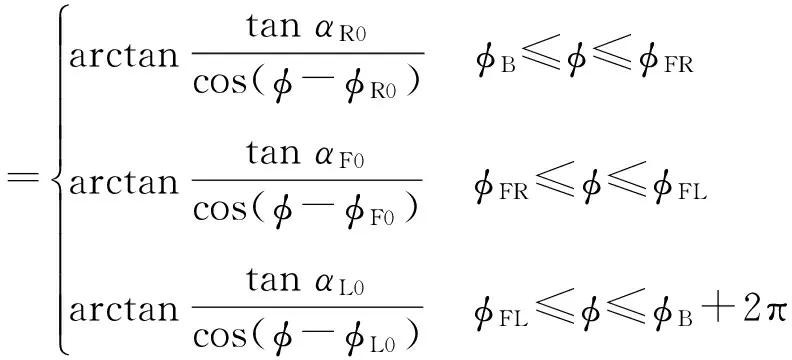
(10)
根据以上公式推导,建立伸缩臂叉装车数学模型,利用Matlab编写程序,代入伸缩臂叉装车相关数据,得到伸缩臂叉装车静态稳定性。伸缩臂叉装车稳定区域如图4所示,其中极半径为叉装车失稳坡度角,角度为叉装车方位角。可以看出,伸缩臂叉装车空载行驶状态下稳定性区域和伸缩臂叉装车满载高位堆垛状态下的稳定性区域[3]。
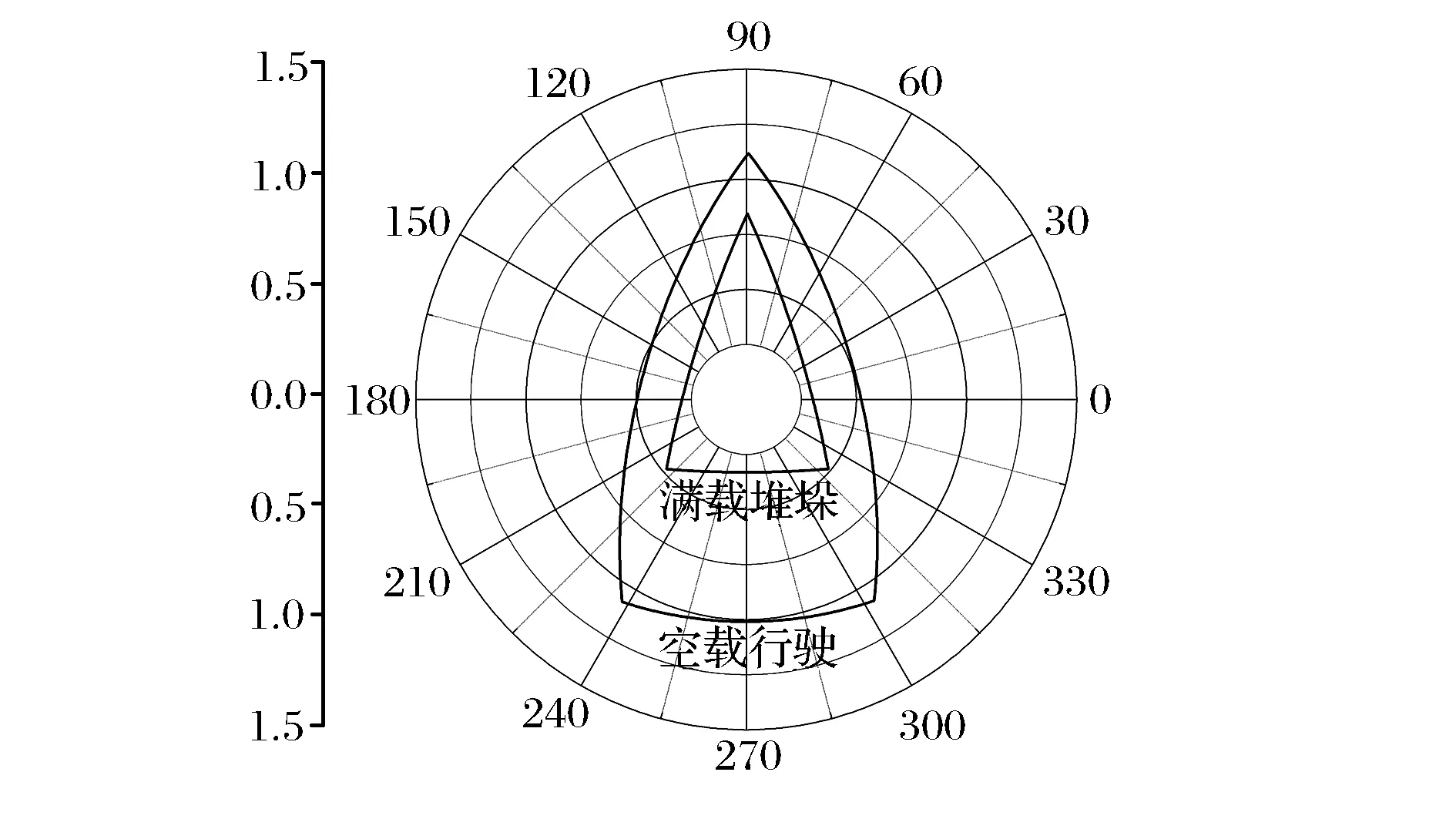
图4 伸缩臂叉装车稳定区域
计算结果表明,伸缩臂叉装车满载高位堆垛状态下的稳定性不如空载状态。对照表1中试验号1、3、5的要求,该型号的伸缩臂叉装车容易发生侧向倾覆,在今后的设计制造中应注意提高其侧向稳定性。
3 结 语
伸缩臂叉装车在高位堆垛时,其稳定性会大大降低,相关操作人员应严格按照操作规范驾驶伸缩臂叉装车完成作业任务。本文以重心法为理论基础,对处于设计阶段的车辆进行稳定性分析,在经济上可以减少开支、缩短设计开发时间,在设计上可以保证准确高效。
[1] 赵丁选.铰接车辆稳定性及其仿真与控制[M].北京:中国铁道出版社,1996:26-29.
[2] 陆植.叉车设计[M].北京:机械工业出版社,1996:33-64.
[3] 苏欣平,周京京,郭爱东,等.基于ADAMS的叉车静态稳定性分析与仿真[J].中国工程机械学报,2012,10(1):77-80.
(编辑:史海英)
Static Stability of Telescopic Forklift Truck with Matlab
ZHU Haitian1, ZHAN Junqing2, JIA Nan2, LI Hongxun2, ZHENG Xin3
(1.Postgraduate Training Brigade, Military Transportation University, Tianjin 300161, China;2.National Emergency Transportation Equipment Engineering Technology Research Center,Military Transportation University, Tianjin 300161, China; 3.Unit 75310, Wuhan 430000, China)
Firstly, the paper studies three-wheeled telescopic forklift truck at rest with characteristic vector method and acquires the conditions for static stability. Then, it establishes a mathematical model with Matlab to analyze the stability performance of telescopic forklift truck at rest, which can provide a convenient and accurate calculating method for testing the stability of telescopic forklift truck in design stage.
telescopic forklift truck; Matlab; characteristic vector method
2016-03-21;
2016-05-31.
朱海天(1991—),男,硕士研究生; 詹隽青(1960—),男,博士,教授,博士研究生导师.
10.16807/j.cnki.12-1372/e.2016.12.021
TH242
A
1674-2192(2016)12- 0089- 03