一种基于相位差的短基线无源定位技术
2016-12-13何洋炎
周 宇,王 宏,何洋炎
(上海微波设备研究所,上海 201802)
一种基于相位差的短基线无源定位技术
周 宇,王 宏,何洋炎
(上海微波设备研究所,上海 201802)
由于当前的长基线无源定位系统在布站选址、目标共视等问题上存在着缺陷,提出了一种基于相位差测量的短基线无源定位技术。该方法通过设置多组相邻等长的基线,模拟运动观测平台模型,推导给出了固定单站对不限定运动条件目标的定位表达式。仿真结果表明, 该方法是一种极具发展前途的单站无源定位方法。
相位差;短基线;单站;无源定位
0 引 言
目前较为成熟的地对空无源定位系统,一般都是多站系统。多站系统具有以下缺点[1-2]:
(1) 选址要求较高
多站系统通常需要2~3个接收站,定位体制为测向交叉定位或时差定位。此类型的定位体制对布站分布方式有较多限制,且为了达到战术指标要求,站间基线通常在20 km以上,不易选取合适的站点。即便站址能达到战略布局的要求,仍需要考虑通视、站间通讯的条件,能满足这一系列条件的站址更是寥寥无几。
(2) 目标共视问题
如果采用的是时差定位体制,则需要实现对目标的共视。当目标为窄波束天线目标时,长基线时差定位很困难。
(3) 阵地建设、维护昂贵
多站系统时间基准严格,需要花费较多财力物力维护站间时间同步设备;通常各站间无法直接通讯,需要花费较多经费对站间通讯设备进行建设和维护;且由于各站址间分布较远,技术人员在对各站进行早期调试或后期保障时也不便利。
若能将多站设备的基线缩短至百米量级,则可实现在单站内进行阵地建设,使系统由多站系统变成单站系统。单站系统可以合理地规避上述缺点。当前成熟的单站地对空无源探测设备功能多以测向探测为主,通常不具备独立定位能力或定位精度较差,战略目的仅为告警。因此,探索和研究高精度的短基线定位设备变得尤为重要。
本技术拟将站间基线的长度缩短至百米量级,实现了单站布置。通过计算短基线相位差,实现了对辐射源目标的无源定位,且解决了常用的固定单站相位差结合多普勒频偏定位技术对于径向运动的盲区,适用性更强。
1 定位算法
短基线相位差定位示意图如图1 所示。
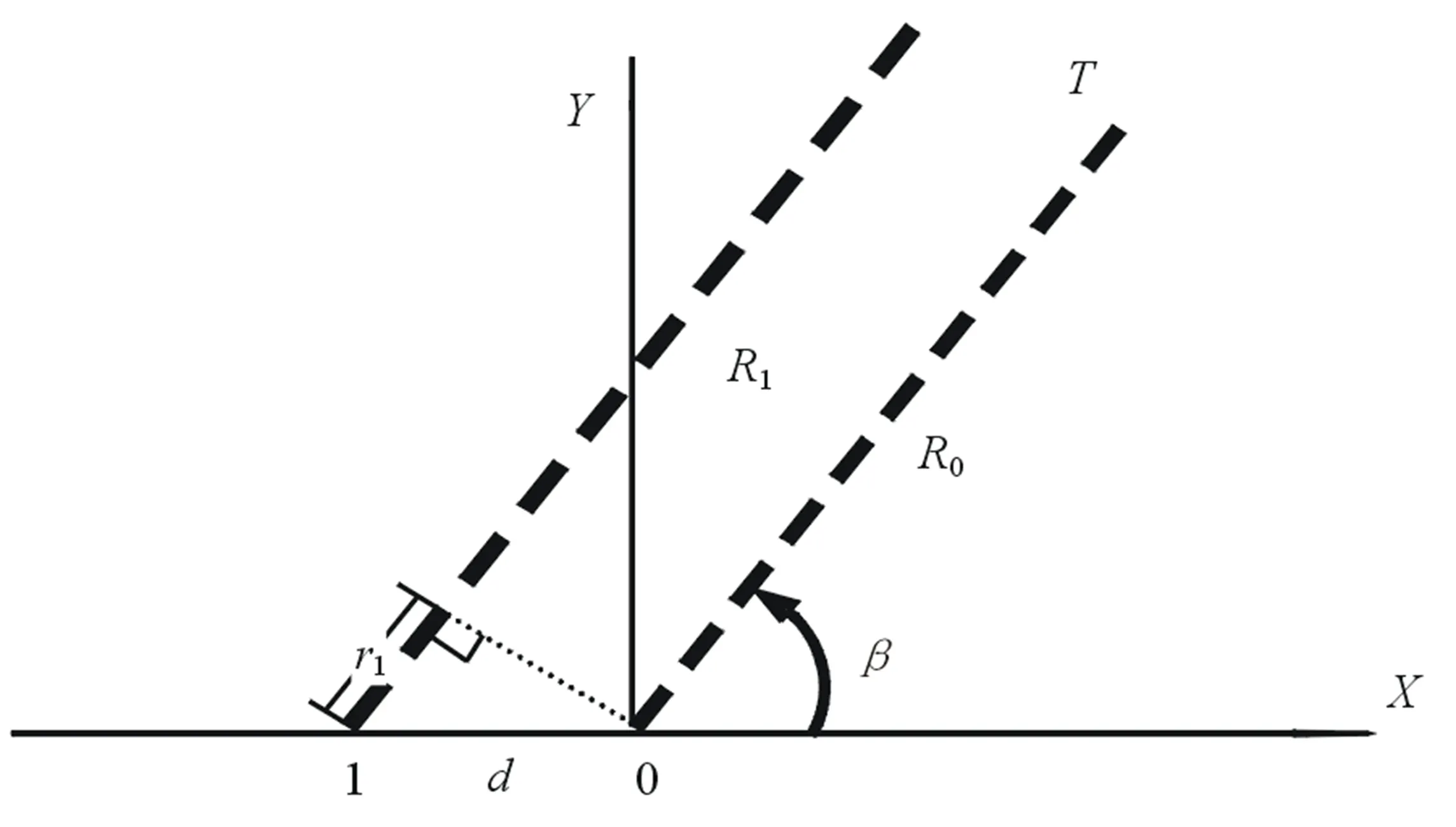
图1 短基线相位差定位示意图
以单基线的二元天线阵为例,二天线0、1之间的基线长度为d,若有一工作波长为λ的辐射源平面波由夹角为β的方向传播而来,它到达二天线的相位差φ为:
(1)
当目标距离远大于基线长度时,R0与R1可视作平行,r1≈R0-R1。因此可推导出:
(2)
对时间t进行求导,得:
(3)
当观测平台为运动平台时,设天线平台沿基线方向运动,速度为v,则有:
(4)
推得[3]:
(5)
若观测平台为固定平台,由于缺少相位差变化率的信息,无法直接定位。此时需要补充新的信息,常用的方法是利用多普勒频偏。但如果目标是固定(或慢速)目标或者目标与观测平台之间的运动趋势为切向运动,则无法测得有用的多普勒频偏,无法定位。
通过设置相邻等长的基线,可模拟运动观测平台,建立固定平台相位差定位模型如图2 所示。
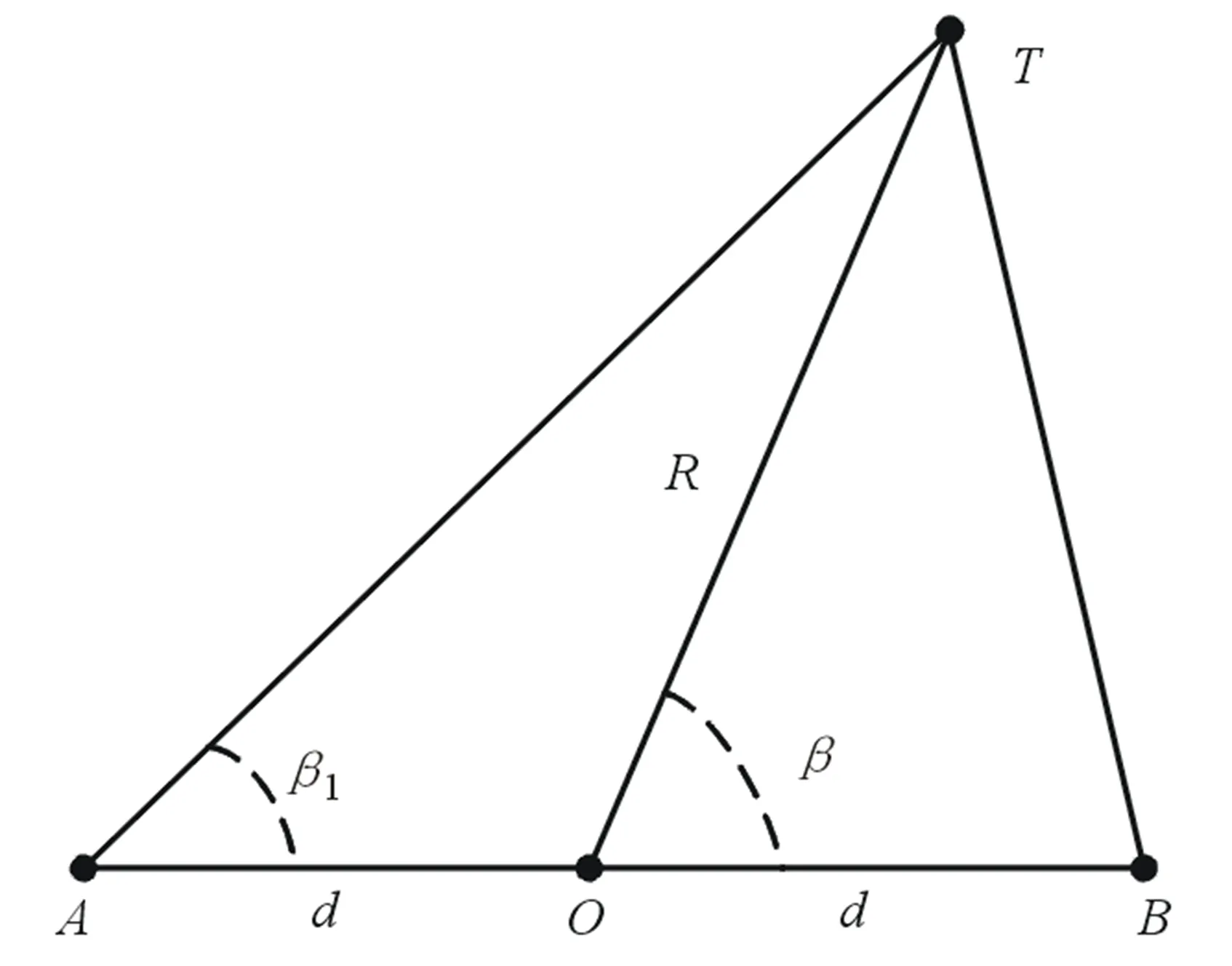
图2 固定平台相位差定位原理图
图2中目标为T,观测点为O、A、B,观测点O、A与O、B间距(基线长度)均为d,目标与观测点的夹角∠TOB为β,∠TAB为β1,入射波波长为λ。
令观测点A、O间相位差为φ1,观测点O、B间在d/v时刻后的相位差为φ2t,此时有:
(6)
由于目标T距离观测点O的距离R远大于基线d的长度,可认为β1等同于β。将公式(6)代入距离公式(5),有:
(7)
当v足够大时,d/v趋近于零,令当前时刻观测点0、2间相位差为φ2,则可推导出目标T距离0点的距离R的近似公式为:
(8)
2 限制条件
以基线法线上的目标为例,设目标频率为10 GHz(即β=90°,λ=0.03 m),由公式(2)可得:
φ≈66.67πd
(9)
当基线d的测量误差为1 mm时,将导致相位差φ的偏差为12°。可见短基线无源定位体制对天线的基线精度具有非常严格的要求,对于较高频段,系统要求天线的安装误差小于1 mm。目前较高级的激光跟踪仪,其标称绝对距离的测量精度为10 μm,按其测量最大不确定度为10 μm的10倍计为0.1 mm,则最终标校最大随机误差可能值为:
则可推算出:
满足所需的1 mm的基线精度要求。
3 仿真验证
短基线无源定位系统定位精度取决于天线阵的基线长度、相位差测量精度及目标信号的频段等。假设天线阵为200 m基线阵列,单天线相位误差8°,观测站位置误差0.2 mm,目标频率为9.3 GHz,推算出定位的GDOP图如图3和图4所示。图中f0=9.3 GHz,d=200 m,σφ=8°,σp=0.2 mm。
基线长度为200 m时,短基线系统对法线方向上不同距离的目标进行定位的相对精度如表1所示;基线长度为150 m时,短基线系统对法线方向上不同距离的目标进行定位的相对精度如表2所示;基线长度为300 m时,短基线系统对法线方向上不同距离的目标进行定位的相对精度如表3所示。
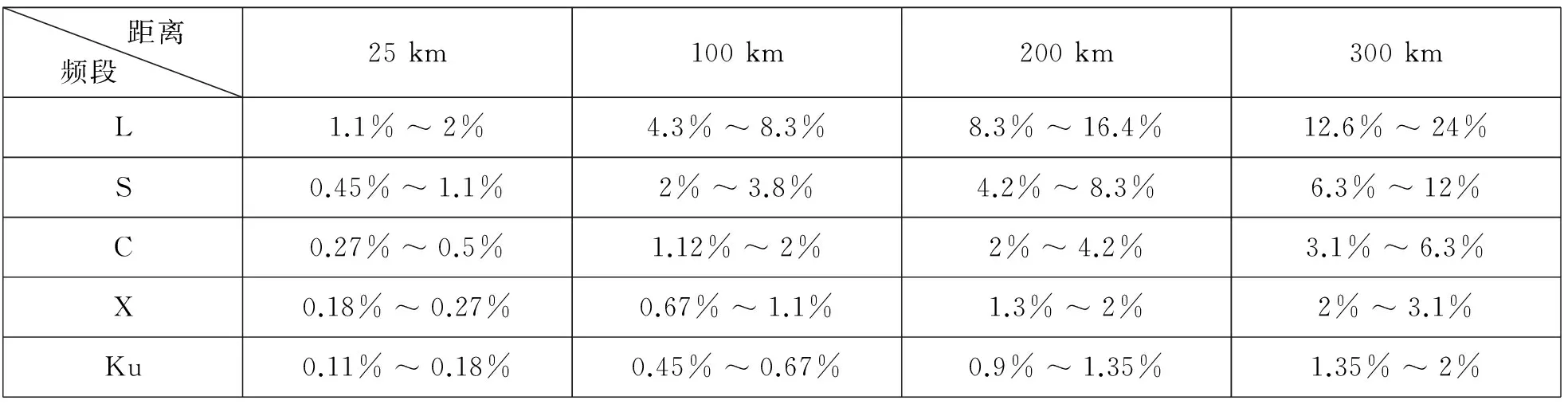
表1 基线长度200 m时的定位精度
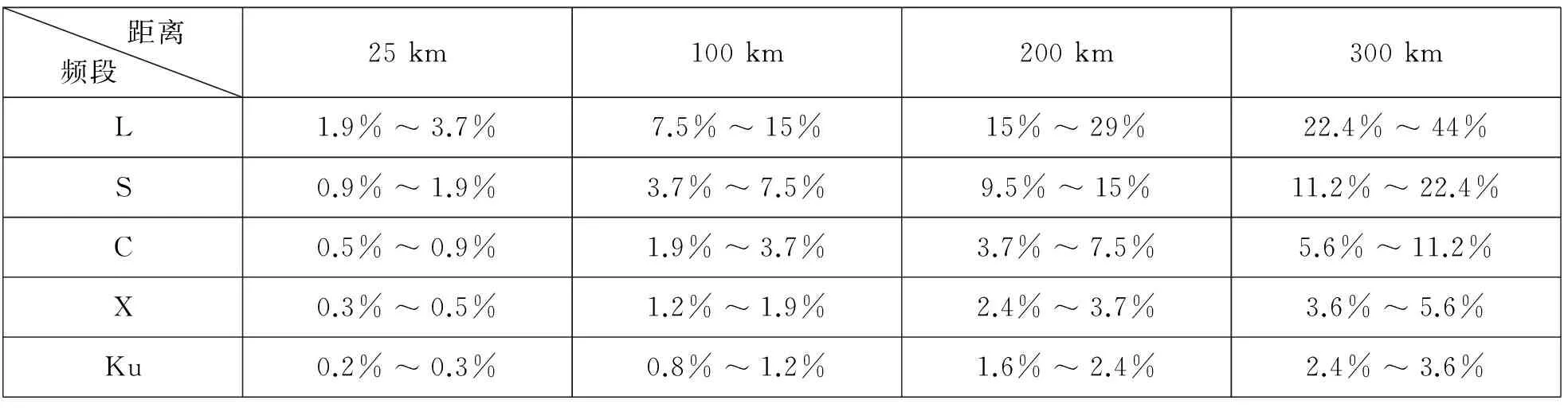
表2 基线长度150 m时的定位精度
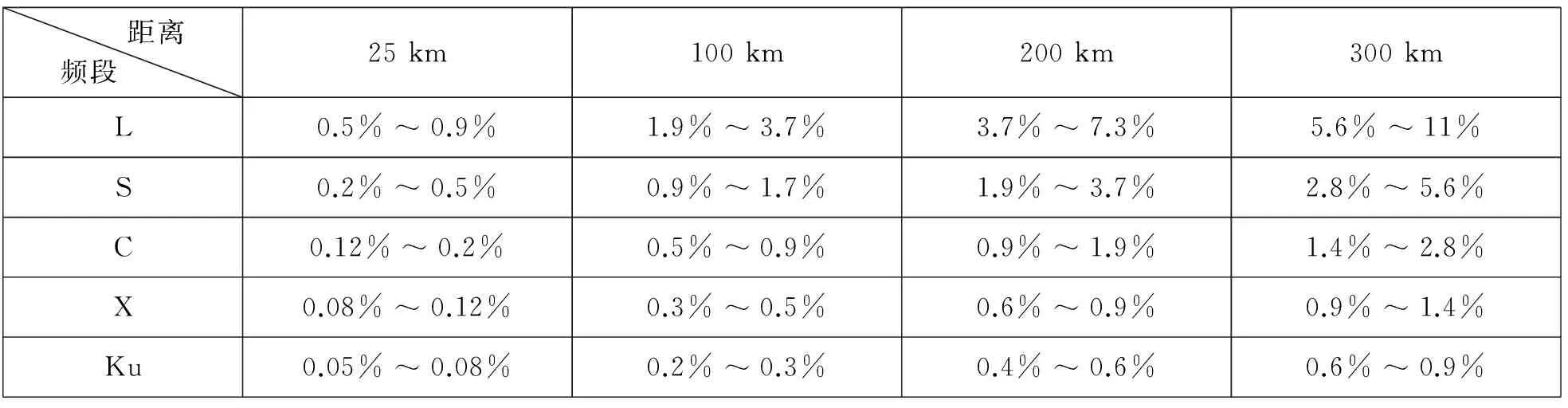
表3 基线长度300 m时的定位精度
可见,在满足一定定位精度要求下,频段越高所需的天线基线长度越短。基线长度达到300 m左右时,基本可实现全频段上的高精度定位。
4 结束语
基于长基线无源定位系统在布站选址、目标共视等问题上的缺陷,本文提出了一种基于相位差测量的短基线无源定位技术。首先推导了短基线相位差定位算法,然后对该算法的定位精度进行了仿真分析。仿真结果证明了该技术的有效性, 该技术是一种极具发展前途的单站无源定位方法。
[1] 赵国庆.雷达对抗原理[M].西安:西安电子科技大学出版社,1999.
[2] 孙仲康,周一宇,何黎星.单多基地有源无源定位技术[M].北京:国防工业出版社,1996.
[3] 郭福成,贾兴江,皇甫堪.仅用相位差变化率的机载单站无源定位方法及其误差分析[J].航空学报,2009,30(6):1090-1095.
A Short-baseline Passive Location Technology Based on Phase Difference
ZHOU Yu,WANG Hong,HE Yang-yan
(Shanghai Research Institute of Microwave Equipment,Shanghai 201802,China)
Because there are still some problems in long-baseline passive location systems,such as station selection,target co-vision and so on,this paper presents a short-baseline passive location technology based on phase difference measurement.This method sets many adjacent groups of baseline with same length at a station,simulates moving observation platform model,deduces the locating expression for fixed mono-station to the target under unlimited moving condition.Simulation result indicates that the method is a very promising mono-station passive locating method.
phase difference;short-baseline;mono-station;passive location
2016-04-07
TN971.1
A
CN32-1413(2016)03-0023-04
10.16426/j.cnki.jcdzdk.2016.03.006