基于VISSIM仿真设置路内停车位的交通量条件
2016-12-12王运霞祖永昶
李 娅,龚 翔,王运霞,祖永昶
(1.公安部交通管理科学研究所,江苏无锡214151;2.无锡市规划设计研究院,江苏无锡214031)
基于VISSIM仿真设置路内停车位的交通量条件
李 娅1,龚 翔2,王运霞1,祖永昶1
(1.公安部交通管理科学研究所,江苏无锡214151;2.无锡市规划设计研究院,江苏无锡214031)
路内停车位挤占道路空间资源,导致道路通行能力降低、交通安全存在隐患。有必要探究设置路内停车位的交通量条件,使整体停车效率最大化。以机非混行条件下的单幅路为研究对象,结合常州市路内停车调查数据,通过VISSIM仿真的方法研究设置路内停车位对路段交通流造成的影响。利用VISSIM建立路内停车模型,设定机动车饱和度为0.1至1.0(步长为0.05)、非机动车饱和度为0.1至1.0(步长为0.1),共模拟190个机非混行场景,分析不同饱和度条件下的机动车和非机动车车均延误。参考交通影响评价中的长路段评价方法,选取其中的延误率作为设置路内停车位后路段服务水平的评价指标,提出机非混行路段设置路内停车位的机动车和非机动车交通量条件。
城市交通;路内停车;设置条件;VISSIM仿真;交通量
0 引言
中国正处于机动化快速发展时期,机动车保有量年均增长速度在10%以上,但静态交通设施的建设却相对滞后,停车难问题在大中城市普遍存在。路内停车在整个停车体系中主要起补充作用,同时也是缓解近期停车难问题的重要手段。但是,路内停车位挤占道路空间资源,其导致的道路通行能力降低、交通安全隐患等问题也不可忽视。因此,在道路宽度条件一定的情况下,有必要探究设置路内停车位的交通量条件,使整体停车效益最大化。
国外对路内停车的仿真研究较为丰富,但是国内外交通流差异较大,中国不能直接照搬国外经验。中国对路内停车的仿真研究较少:文献[1]通过推导车均延误—停车距离模型,提出路内停车路段与交叉口最佳距离的设置方法,并用VISSIM仿真对模型理论结果进行验证;文献[2]利用VISSIM仿真分析4种机—非干扰模式对路内停车设置的影响;文献[3]针对设置路内停车位后对非机动交通行为的影响进行研究。
中国尚无专门针对路内停车的仿真软件,本文结合中国大中城市交通流特点,综合考虑几款主流的交通仿真软件,采用VISSIM仿真软件对路内停车设置的有效性与适用性进行仿真验证。
1 路内停车VISSIM建模
1.1 仿真对象和目的
路内停车对交通流的影响主要有两个方面[4]:1)路内停车占用非机动车道,迫使非机动车向机动车道偏移或直接在机动车道上通行,形成机非混行状态,增加路段冲突,使机动车流速度降低,这一过程被称为摩擦效应;2)路内停车的驶入和驶出可能阻断路段车流,尤其是当路段交通量较大时,驶入和驶出的车辆不会完全等待可穿越的机动车间隙,而是强行穿越,给路段上车辆造成很大干扰,严重时可能形成交通拥堵,这一过程被称为阻滞效应。

图1 输入速度参数Fig.1 Inputspeed parameters
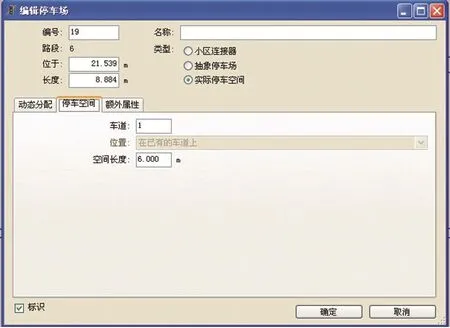
图2 路内停车参数录入Fig.2 Inputon-streetparking parameters
在一定时段内,若路内停车位无车辆驶入驶出,则需考虑对机动车车流的摩擦效应,否则,除摩擦效应以外,还应考虑路内停车对机动车车流的阻滞效应。为了更好地分析停车位对交通流的影响,本文采用VISSIM仿真的方式,主要针对路内停车位设置于无机非分隔带的单幅路情况进行仿真验证,目的是分析和比较在不同的机动车和非机动车饱和度情况下的机动车和非机动车的车均延误,得出设置路内停车位的交通量条件。这种设置形式路内停车对行驶中的非机动车、机动车都会造成一定的影响。
1.2 VISSIM建模过程
以常州市药皇庙弄为原型进行VISSIM建模研究。药皇庙弄为城市支路,道路横断面形式为单幅路,双向机动车道宽7m,路内停车位设置于道路南侧,共15个,停车位宽2m。根据实际调查,1 h共有28次车辆驶入,13次车辆驶出。
本文结合实地调查数据和仿真实验的需要,输入模型所需要的相关参数值。由于路内停车以小型车为主,VISSIM仿真中车辆类别主要为小型车和非机动车,调整每一类别所包含的车辆类型,并定义各种车辆对应的外廓尺寸、最大加减速度等。根据实测数据,机动车期望速度为25~45 km·h-1,非机动车期望速度为10~28 km·h-1(见图1)。
机动车驾驶行为选取W iedemann74跟车模型,平均停车间隔模型根据中国城市道路的仿真经验取值为1.2m。非机动车驾驶行为选择Wiedemann99模型,设置非机动车停车间距为0.5m,最小横向间距为0.2m,并依次设置车道变换、横向行为、超车行为等相关参数。
路内停车时间分布根据实测数据按照经验分布定义。在停车场创建窗口设定停车类型、尺寸等属性,参数输入界面如图2所示。
完成数据输入后,还需要使用优先规则、路径选择等建模手段使模型更符合实际,仿真界面如图3所示。
经验证,模拟输出的机动车行程时间与药皇庙弄实测数据误差在8%以内,满足精度要求,因此仿真模型可以用于研究设置停车位的交通量条件。模拟输出的数据主要为车均延误、行程时间等。
2 仿真数据分析
本次仿真机动车饱和度(V/C)按照0.1~1.0(步长均为0.05)设定、非机动车饱和度按照0.1~1.0(步长均为0.1)设定,共模拟了190个机非混行场景。由于停车位占用原非机动车道设置,因此,计算非机动车道的通行能力时,应在原非机动车道宽度的基础上,扣除路内停车位占用的道路宽度。
仿真主要输出了2种延误值,即机动车车均延误和非机动车车均延误(见图4)。
1)机动车、非机动车的车均延误值随着机动车饱和度的增加而不断增大。当机动车与非机动车饱和度均为0.1时,机动车和非机动车延误均较低,分别为5.3 s和0.4 s,可忽略。但当机动车与非机动车饱和度均为1.0时,机动车和非机动车延误显著增至42.2 s和34.9 s。
2)当机动车饱和度小于0.4、非机动车饱和度小于0.5时,机动车和非机动车的车均延误增长平缓,路内停车对机动车和非机动车影响不大,机非干扰程度较轻。说明在路段交通流不大的情况下设置路内停车位,对交通流的摩擦和阻滞效应较小。
3)当机动车饱和度大于0.4、非机动车饱和度大于0.7时,机动车和非机动车的车均延误变化剧烈,路内停车对机动车和非机动车影响较大,机非干扰程度较重。说明随着路段机动车交通量的增加,路内停车对交通流的摩擦和阻滞效应愈加明显,严重时会阻塞交通。
4)保持机动车饱和度不变时,机动车的车均延误较非机动车大,并且机动车与非机动车的车均延误均随着非机动车交通量的不断增长显著提高,尤其是当饱和度大于0.6以上时增长尤其显著(见图5)。由于无机非分隔带的路内停车位设置对机动车和非机动车均有影响,因此需要综合考虑路段机动车和非机动车的交通量条件。
3 路内停车位设置的交通量条件
在道路条件满足设置路内停车位的前提下,路段机动车交通量、非机动车交通量是判断道路能否设置路内停车的主要依据。本文根据VISSIM仿真得到设置路内停车位后的机动车车均延误值,可以评价路内停车位对路段的影响,从而得出路内停车位设置的交通量条件。

图3 路内停车仿真界面Fig.3 On-streetparking simulation interface
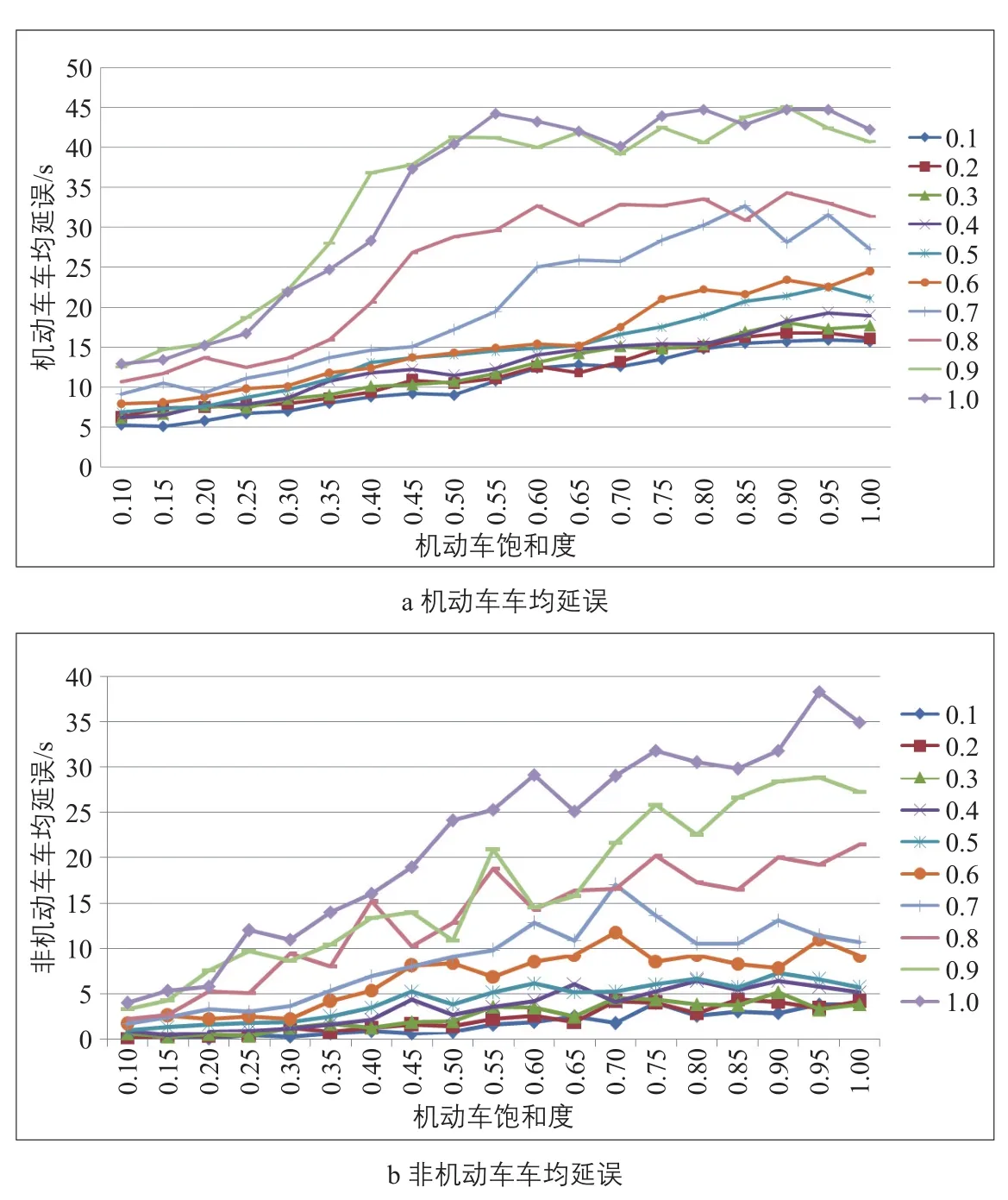
图4 不同饱和度下的车均延误Fig.4 Average vehicle delay under different levelsof saturation
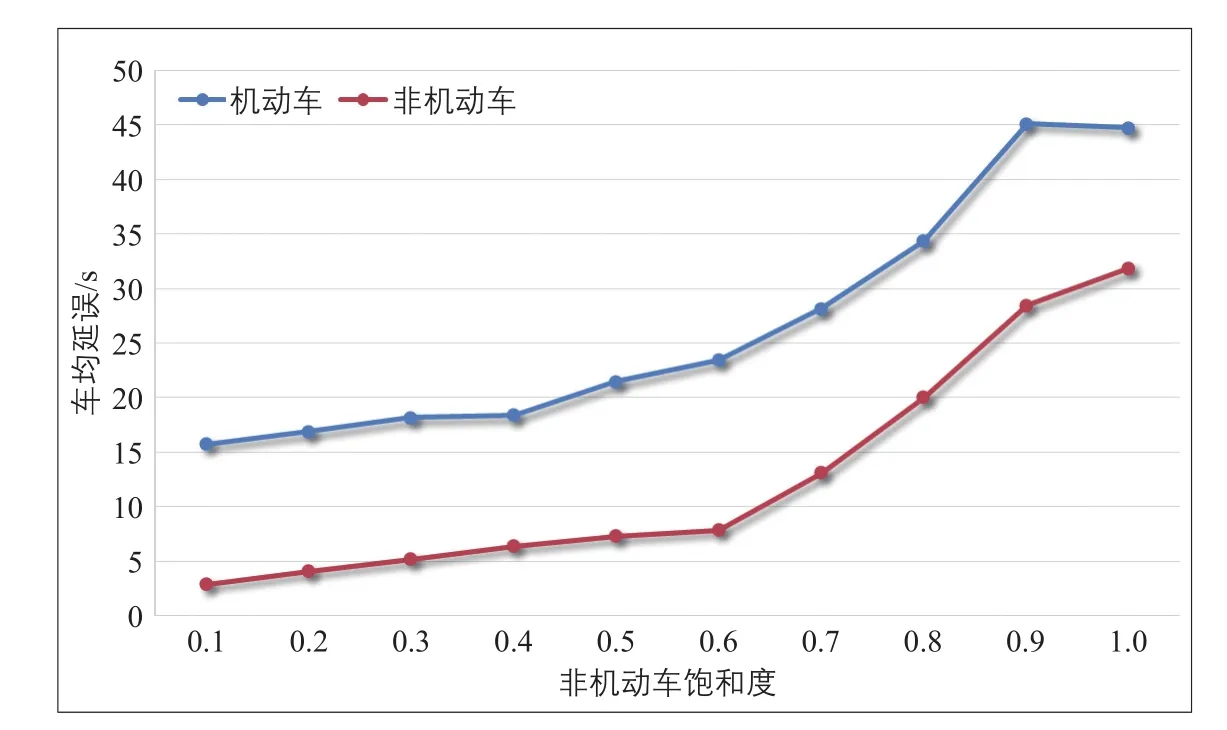
图5 机动车饱和度为0.5时,机动车和非机动车车均延误Fig.5 Average delay ofmotorized and non-motorized traffic in case ofa0.5 saturation rate
3.1 路内停车服务水平评价原理
路内停车服务水平评价主要参考《建设项目交通影响评价技术手册》(以下简称《手册》)[5]关于长路段服务水平的评价指标。
3.1.1 长路段交通影响评价方法
《手册》规定,进行交通影响评价的长路段定义为路段交通几乎不受交叉口影响的路段区域。长路段根据所属道路等级不同,可分为高速公路长路段、快速路长路段、一级公路长路段等6类。不同等级路段对应的评价指标也有所区别,对于高速公路、快速路、一级公路长路段,其评价指标为交通流密度,对于二级、三级、四级公路长路段,其评价指标为延误率。本文设置路内停车的单幅路可参照二、三、四级公路长路段的指标。
延误率是指延误时间占标准运行时间的百分率,路段停车交通流延误率指通过该路段长度的车辆实际运行延误时间与标准运行时间的比值百分数值。在已知该路段交通量和路段物理条件的基础上,可以预测路段交通量的通行时间,或通过仿真软件得到车辆区间运行时间和规划道路等级下设计车速或运行车速,以此求得

式中:tr为车辆通过单位长度路段实际平均运行时间/s;ts为车辆在理想条件下通过该路段所需平均行程时间/s;ty为车辆实际通过单位长度路段的车均延误/s。
3.1.2 路内停车服务水平评价
由于本次VISSIM仿真只建立了路段的停车模型,模拟得到的延误数据不受交叉口影响,因此可以采用交通影响评价中的长路段评价方法,同时,参考《公路工程技术标准》(JTB B01—2014)中二、三、四级公路的服务水平分级,选取其中的延误率作为设置路内停车位后路段服务水平的评价指标(见表1)。

表1 设置路内停车位后路段服务水平评价标准Tab.1 Evaluation standard of roadway segment levelof serviceafter setting on-streetparking
根据《公路工程技术标准》(JTB B01—2014),当路段服务水平达到四级时,交通流处于稳定流范围下限,但是车辆运行明显受到交通流内其他车辆影响,速度和驾驶的自由度受到明显限制。交通量稍有增加就会导致服务水平显著降低,驾驶人身心舒适水平随之降低,即使较小的交通事故也难以消除影响,会形成很长的排队车流。
因此,将路段四级服务水平的上限作为设置路内停车位的临界值,即路段延误率小于等于80%时,可设置停车位;路段延误率大于80%时,不可设置路内停车位。
3.2 交通量条件
VISSIM仿真得到未设置路内停车位时车辆通过路段的平均行程时间为19.3 s,由公式(1)计算得出当路段机动车车均延误小于等于15.4 s时即可设置停车位。
路内停车模型模拟得到不同机动车和非机动车饱和度情况下机动车车均延误值(见表2),其中表格的灰色部分为满足路内停车位设置要求的延误指标。由此得到机非混行路段上设置路内停车位的机动车和非机动车交通量条件(见表3)。
4 结语
单幅路设置路内停车位,动静态交通影响关系复杂,利用VISSIM仿真技术可以有效模拟各种交通情境,并输出大量实验数据,提高分析精度。本研究提出设置路内停车位的交通量条件,提供了量化标准的研究思路,可以为完善路内停车的规划设计提供参考。本文研究的交通量设置条件结论主要适用于不受交叉口影响的长路段情况,下一阶段可深化受信号控制交叉口影响的路段的路内停车位研究,补充完善设置路内停车位的交通量条件。
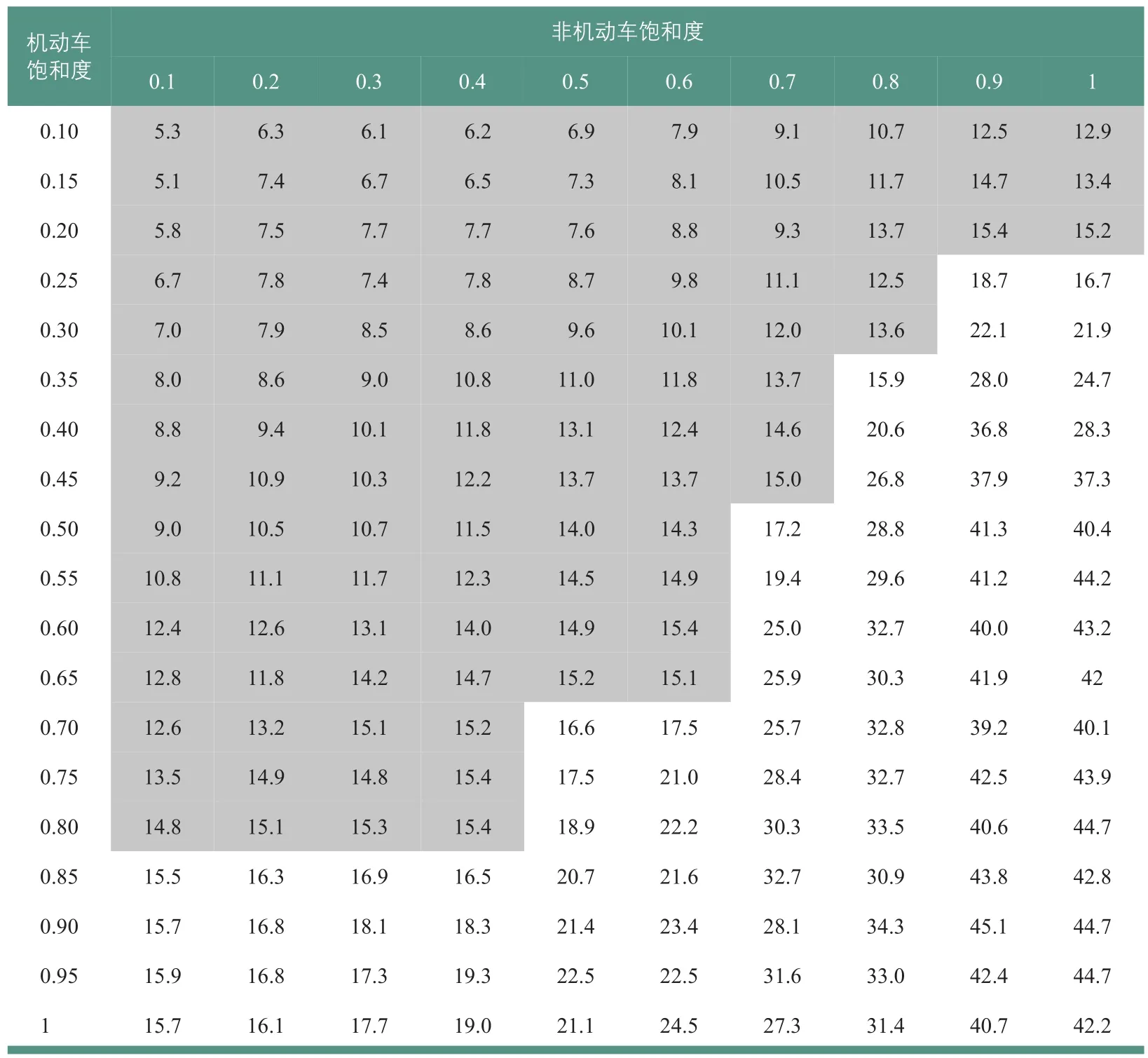
表2 不同饱和度情况下机动车车均延误值Tab.2 Average vehicle delay under different levelsof saturation s
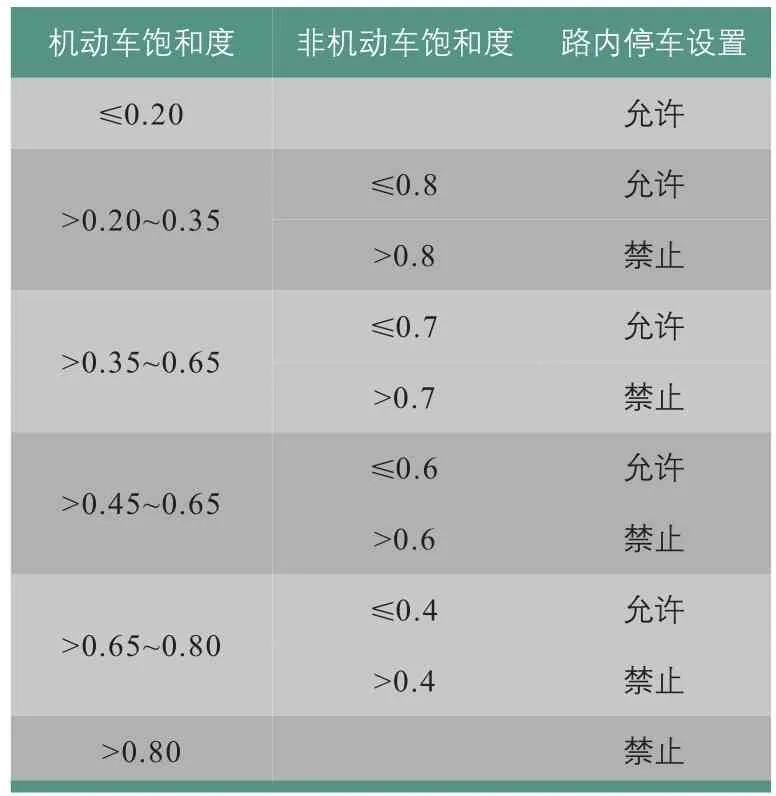
表3 机非混行路段设置路内停车位的交通量条件Tab.3 Traffic flow conditions forsetting on-street parkingw ithmixed traffic
[1]杨晓光,龙亮,蒲文静.信号控制交叉口单侧路边停车最佳位置研究[J].同济大学学报(自然科学版),2005,33(3):297-300.Yang Xiaoguang,Long Liang,Pu Wenjing.Optimal Distance Between One-Side Curbside Parking Location and Signalized Intersection[J].Journal of Tongji University(Natural Science),2005,33(3)∶297-300.
[2]高利平,孙全欣,刘明军,等.基于路边停车的机非混行延误模型与仿真研究[J].系统仿真学报,2010,22(3):804-808.Gao Liping,Sun Quanxin,Liu M ingjun,et al.Delay Models and Simulation on M ixed Traffic System w ith Curb Parking[J].Journal of System Simulation,2010,22(3)∶804-808.
[3]郭宏伟,高自有,赵小梅,杨小宝.路内停车对非机动车交通行为影响研究[J].交通运输系统工程与信息,2011,11(1):79-84.Guo Hongwei,Gao Ziyou,Zhao Xiaomei,Yang Xiaobao.Traffic Behavior Analysis of Non-Motorized Vehicle Under Influence of Curb Parking[J]. Journal of Transportation Systems Engineering and Information Technology,2011,11(1)∶79-84.
[4]张泉,黄富民,曹国华,等.城市停车设施规划[M].北京:中国建筑工业出版社,2009.
[5]《建设项目交通影响评价技术标准》编制组.建设项目交通影响评价技术手册[M].北京:中国建筑工业出版社,2011.
A Simulation-Based Approach to Determ ine the Relationship Between Traffic Flow Conditions and On-Street Parking
LiYa1,Gong Xiang2,Wang Yunxia1,Zu Yongchang1
(1.Traffic Management Research Institute of Public Security M inistry,Wuxi Jiangsu 214151,China;2.Wuxi Instituteof Urban Planning and Design,Wuxi Jiangsu 214031,China)
∶Road space generally occupied by on-street parking resulted low roadway capacity and traffic dangers.To achieve a high parking efficiency,it is necessary to discuss the traffic flow conditions for setting on-streetparking.Focusing on divided road w ithm ix traffic,this paper investigates the impacts of onstreet parking on traffic flow using Changzhou on-street parking investigation data and VISSIM simulation.About190 scenarios are simulated using on-streetparkingmodel,w ith a saturation ofmotorized traffic from 0.1 to 1.0(stepw ise 0.05)and a saturation of non-motorized traffic from 0.1 to 1.0(stepw ise 0.10),to analyze the average delay ofmotorized and non-motorized traffic by different saturation.Taking traffic delay rate asan indicator evaluating roadway levelof service based on traffic impactassessment,the paper proposes the traffic volume ofmotorized and non-motorized traffic for the setting of on-street parking on the roadway w ithm ix traffic.
∶urban transportation;on-streetparking;setting conditions;VISSIM simulation;traffic flow
∶
1672-5328(2016)06-0055-05
U491
A DOI∶10.13813/j.cn11-5141/u.2016.0609
2014-12-01
国家科技支撑计划课题“动静态一体化城市交通智能联网联控技术集成及示范”(2014BAG03B01)
李娅(1983—),女,四川绵阳人,硕士,工程师,主要研究方向:交通工程、交通管理。E-mail∶liya821@126.com