一种利用运动补偿的改进JPDA-UKF算法*
2016-12-09王方超卢华平
程 欢,王方超,卢华平,李 斌
(镇江船艇学院指挥系,江苏镇江212003)
一种利用运动补偿的改进JPDA-UKF算法*
程 欢**,王方超,卢华平,李 斌
(镇江船艇学院指挥系,江苏镇江212003)
在恒虚警条件下,针对传统的航海雷达模拟器目标跟踪采用的基于不敏卡尔曼滤波的联合概率数据互联算法(JPDA-UKF)发散、复杂度高和实时性差的问题,提出了一种利用运动补偿的笛卡尔坐标下改进的JPDA-UKF滤波方法。该算法引入相邻周期回波间运动补偿提取的目标量测可信度矩阵,限制进入跟踪门相交区域中的虚假量测数量,并将软跟踪门技术应用于滑窗逻辑法实现航迹管理。仿真结果表明,所提方法径向速度误差比传统的JPDA-UKF算法与自适应的α-β滤波算法分别降低10%和20%,目标获得稳定航迹后径向速度归一化均方根误差(RMSE)比上述两种方法分别具有约10 dB和15 dB的性能优势,算法的复杂度符合真实雷达的边扫描边跟踪的实时处理。
雷达模拟器;目标跟踪;运动补偿;JPDA-UKF算法;α-β滤波
本文公式中向量或矩阵右上角符号“′”表示矩阵转置。
2 目标跟踪模型
跟踪目标运动状态X(k)与前一时刻的运动状态X(k-1),船舶目标的匀速运动状态方程[7]为
X(k)=FkX(k-1)+Γkvk。(1)

式中:ρ和θ分别为极坐标下雷达的目标径向距离和方位角测量数据。则系统的初始状态可以利用前两个时刻的量测值确定,即

当前k时刻量测噪声在直角坐标系下的协方差为

式中:σ2ρ和σ2θ分别是径向距离和方位角测量误差的方差;而观测矩阵

由量测噪声协方差可得四维状态向量下的初始协方差阵:滤波器从k=2时刻开始工作,k≥3时状态预测协方差P(k+1|k)及状态更新协方差矩阵P(k+1|k+1)的设置采用UKF滤波。在某一时刻多目标跟踪算法中,落入目标j跟踪门限内的量测数目为mj(k)。高斯噪声下的非线性滤波目标运动状态预测X(k+1|k)需要计算第i个量测与目标j互联的概率[8]。
3 算法流程
3.1 雷达回波数据存储
以扫描周期Tk为时间间隔将雷达图像存入内存,根据需要,可存入N幅雷达图像,如图1所示。本文所使用的雷达回波图像是模拟器屏幕上截取的N幅RGB位图,表示雷达天线转动N周所产生的回波图像,天线的转速是24 r/min,雷达扫描周期Tk= 2.5 s。设当前时刻为T,以前的记录时刻为T-Tk,T -2Tk,…,T-NTk,则T时刻的雷达图像存入时,TNTk时刻的雷达图像就被清除。
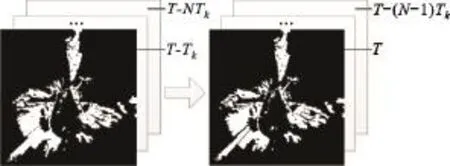
图1 雷达回波存储图Fig.1 The saved echo image
3.2 相邻周期回波图像运动补偿
运动补偿是通过先前的局部图像来预测、补偿当前的局部图像,是减少存储回波图像序列冗余信息的有效方法。相邻周期的两幅雷达回波图S、R,首先将RGB回波图转化为灰度图,用阈值法将灰度图转化为二值图。相邻周期两幅回波二值图,由于本船位置运动,回波像素点生成运动补偿,由运动补偿中的量测点生成可信度矩阵TR=(S-R),表示按图像对应位置的像素点灰度值进行相减运算。可信度矩阵中的正值像素点表示两个连续周期雷达回波的移动,即当前时刻目标船的运动补偿,如图2(a)方框中的目标船,箭头方向是目标可能的运动方向;图2(b)为极坐标下的扇形波门,转换到笛卡尔坐标系后变为椭圆形跟踪波门。
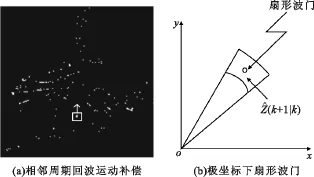
图2 相邻周期回波运动补偿和极坐标下扇形波门Fig.2 Motion compensation at the adjacent time-scan and sector validation gates in polar plane
3.3 目标的手动捕捉
(1)鼠标选择目标
计算出目标的像素点的值,如图2(a)方框中的动态目标,结合量程即可估算出目标的大小,录取的目标个数是j(j≥0)。
(2)计算目标的大小及中心位置的距离方向
当目标长或宽大于500 m时即可认为是固定目标。从目标像素的横纵坐标中点值坐标,即可计算出目标的中心位置。
(3)跟踪门[6]的设定
可信度矩阵TR中的量测值z满足以下条件则称量测值落入扇形波门内,量测值是目标的候选回波,限制进入跟踪门相交区域中的量测数量mj(k)。

3.4 自动跟踪
手动录取的目标立即转入自动跟踪。图3表示T-NTk时刻的跟踪圈是套准了目标中心位置的,而到下一时刻T-(N-1)Tk时目标运动了,跟踪门只能有偏差地套住目标,因而需要通过UKF来消除这种偏差(新息)。当前时刻目标j的有效量测数记为Zjk= {(i)},目标运动状态预测方程、协方差预测矩阵及UKF滤波器中各参数的选取在文献[6]中有详细推导,这里不再赘述。下一时刻目标运动状态更新方程、协方差更新矩阵为P(k+1|k+1),设θij表示量测i源于目标j(j≥0)的事件,互联概率用βij表示。此时,JPDA-UKF目标向量状态更新方程Xjk+1|k+1、协方差更新矩阵Pjk+1|k+1的推导如下:
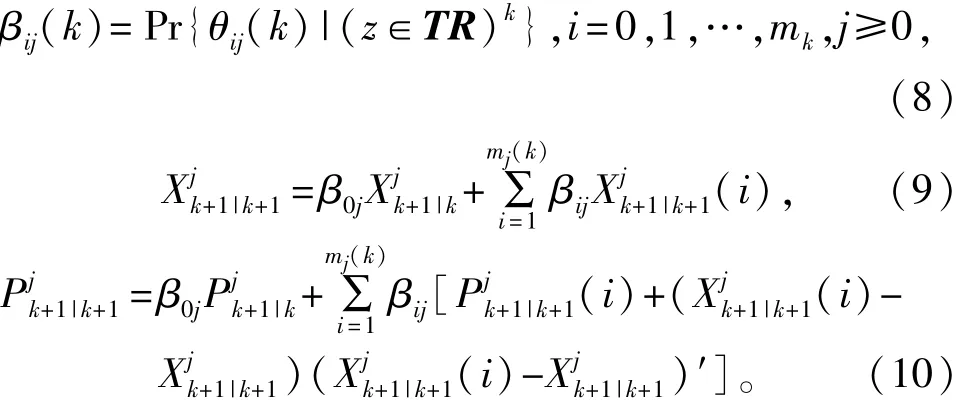
以此类推,使跟踪圈的中心追随目标中心而运动,形成航迹外推的“软跟踪门”。跟踪准确后确定下来的跟踪圈中心轨迹参数就代表了目标的运动轨迹。确定了前N个时刻的目标位置(轨迹)后,结合目标船对地的速度、方向等运动矢量的计算方法,即可估算出目标当前时刻的运动矢量。
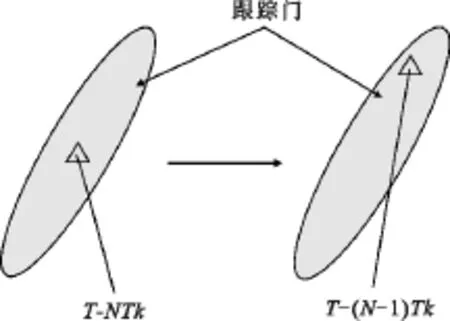
图3 相邻周期跟踪门Fig.3 Target tracking gates at the adjacent time-scan
3.5 跟踪管理
如图4所示,如果量测Tj(k)落入目标j设定的跟踪门内,则该量测与目标j关联并设置为初始跟踪航迹,否则认为该量测可能与新目标相关。第二次扫描,如果该量测确实落入新目标跟踪门限,则设置为与目标j+1的互联并设置为新目标的初始跟踪航迹,否则,跟踪结束。初始跟踪航迹用UKF预测下一位置点,用公式(7)预测值与量测值的差值设定下一时刻Tj(k+1)的跟踪门。第三次扫描,利用滑窗逻辑法[7],n次扫描中如果有m次量测都落入j目标的跟踪门,这是航迹起始的条件。如果航迹判定达不到逻辑法的要求,航迹起始结束。工程上使用m/n=2/3作为快速启动,比值m/n=3/4作为稳定航迹起始。
图4 滑窗法的m/n逻辑原理Fig.4 The m-of-n rule logic for slide window
3.6 跟踪结束
有以下条件之一的判断为航迹跟踪结束:一是在过去的N*个扫描周期的跟踪门里未检测到目标j的量测值;二是航迹跟踪不稳定,协方差矩阵位置与速度超过预置门限;三是目标j径向速度超过了一定范围。
4 仿真结果
4.1 评价标准
比较自适应α-β滤波的航迹跟踪算法[3](记为方法1)、传统的JPDA-UKF[5]算法(记为方法2)以及本文的基于运动补偿改进的JPDA-UKF滤波共3种目标跟踪算法性能。采用的算法性能评价标准是目标径向速度误差和目标径向速度的归一化均方根误差(Root Mean Squared Error,RMSE),前者用来衡量估计值与真值间的误差,后者用来衡量跟踪滤波算法形成并维持稳定航迹的性能。
4.2 仿真场景设置
计算机仿真的CPU采用英特尔酷睿四核i3-4160,主频3.6 GHz,内存4 GB;雷达方位与角度分辨单元NA、NR采用屏幕分辨率1 600×900。本船初始位置为经度118.063 08E、纬度24.486 330N,对地航向 23.7°,对地航速0.2 kn,雷达量程设置6 n mile;目标船 1相对本船方位角 180°,距离1.73 n mile,对地航速5 kn,对地航向23.7°;目标船2相对本船方位角225°,距离1.4 n mile,对地航速6 kn,对地航向93.7°。初值的选取:初始协方差矩阵设置,高斯噪声σk=0.01 m/s2,径向距离和方位角测量标准差σρ=30 m和σθ=2.5°,由测量误差计算出协方差阵R(k)和运动状态初始协方差阵P(1|1)。本文仿真船舶某型导航雷达的技术参数设置:雷达扫描周期 Tk=2.5 s,杂波密度 λ=2× 10-6个/m2,船舶检测概率PG=0.99,跟踪门限γ= 9.21,航迹起始逻辑m/n=2/3。满足下列条件之一设置跟踪结束:未扫描到量测的周期数N*=3;相邻周期间位置协方差σx,y>500 m、速度协方差σ˙x,˙y>10 m/s;目标船最大速度Vmax≥25 m/s。
4.3 仿真结果
每一扫描周期Tk内人工录取j个目标,同时进行多目标跟踪,当前时刻计算机存储的雷达回波图见图5(a),相邻扫描周期的运动补偿图与跟踪波门航迹起始波门(虚线表示)及航迹稳定波门(实线表示)的对应关系如图5(b)所示。坐标中心的方形区域表示本船导航雷达天线所在位置,人工录取的目标航迹稳定波门共5条,分别是4.2节中仿真的2个运动目标以及3个固定目标的回波,包括人造桥梁、陆地等。
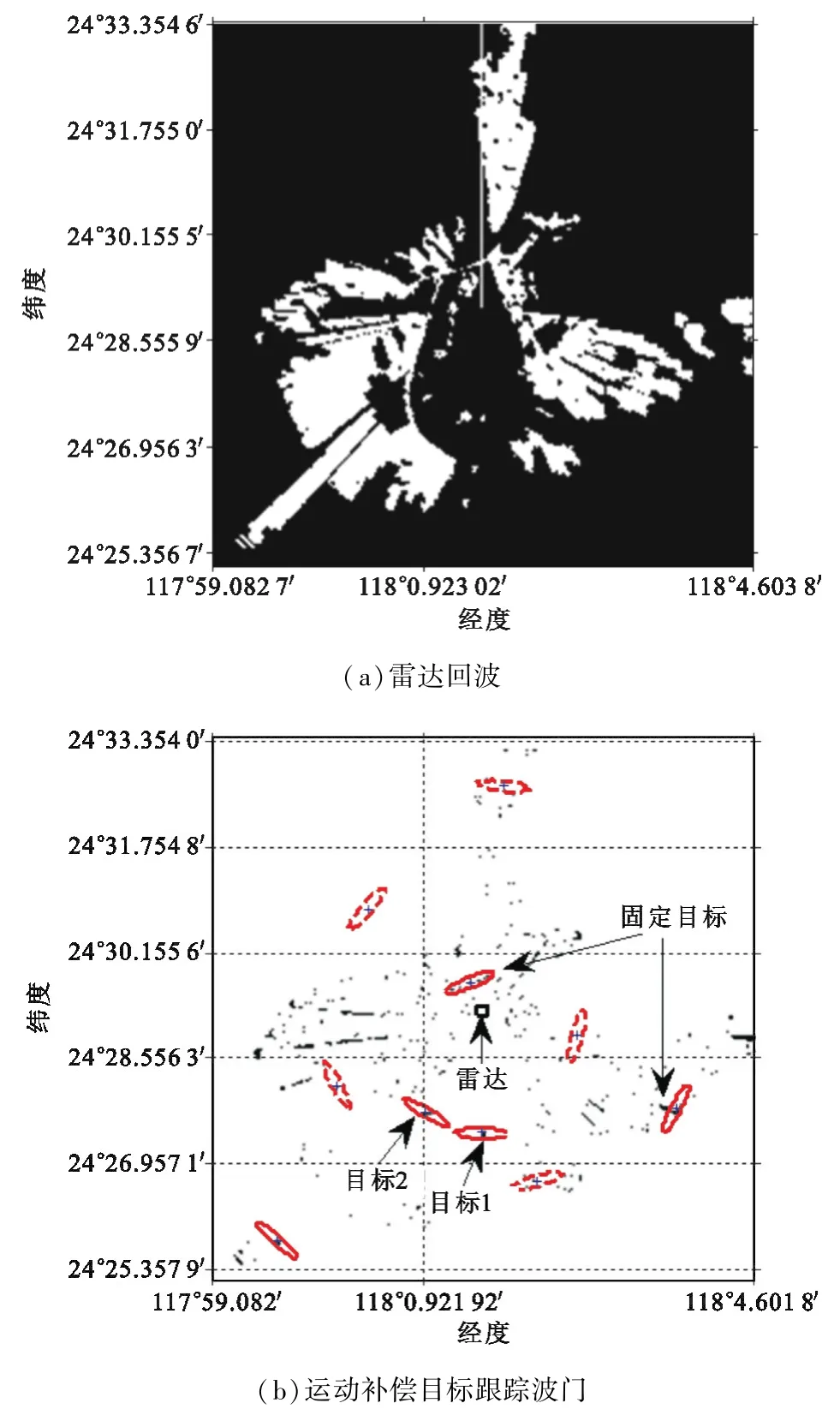
图5 一个扫描周期的运动补偿目标跟踪波门Fig.5 Validation gates,projected in the Cartesian plane, of confirmed(solidline)and preliminary(dash line)tracks, and detections(black dots)at the current time-scan
跟踪准确后确定的跟踪圈中心轨迹参数就代表了目标的运动轨迹。运动目标1、2的稳定航迹如图6所示,箭头指向目标1航迹的局部放大。目标船沿着固定航向以固定速度运动,但叠加了观测噪声及杂波,目标船实际运动轨迹并不是直线。跟踪算法精密度用径向速度的RMSE进行评价,对目标1航迹跟踪进行分析,采样点长度50,对3种方法分别进行500次蒙特卡洛仿真实验,得到的径向速度的误差Verror、归一化RMSE比较结果如图7所示。速度RMSE与跟踪采样点的变化曲线采用对数坐标,其计算公式为

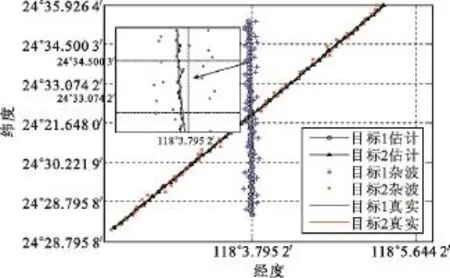
图6 本文算法航迹跟踪结果Fig.6 Tracking result of the proposed method
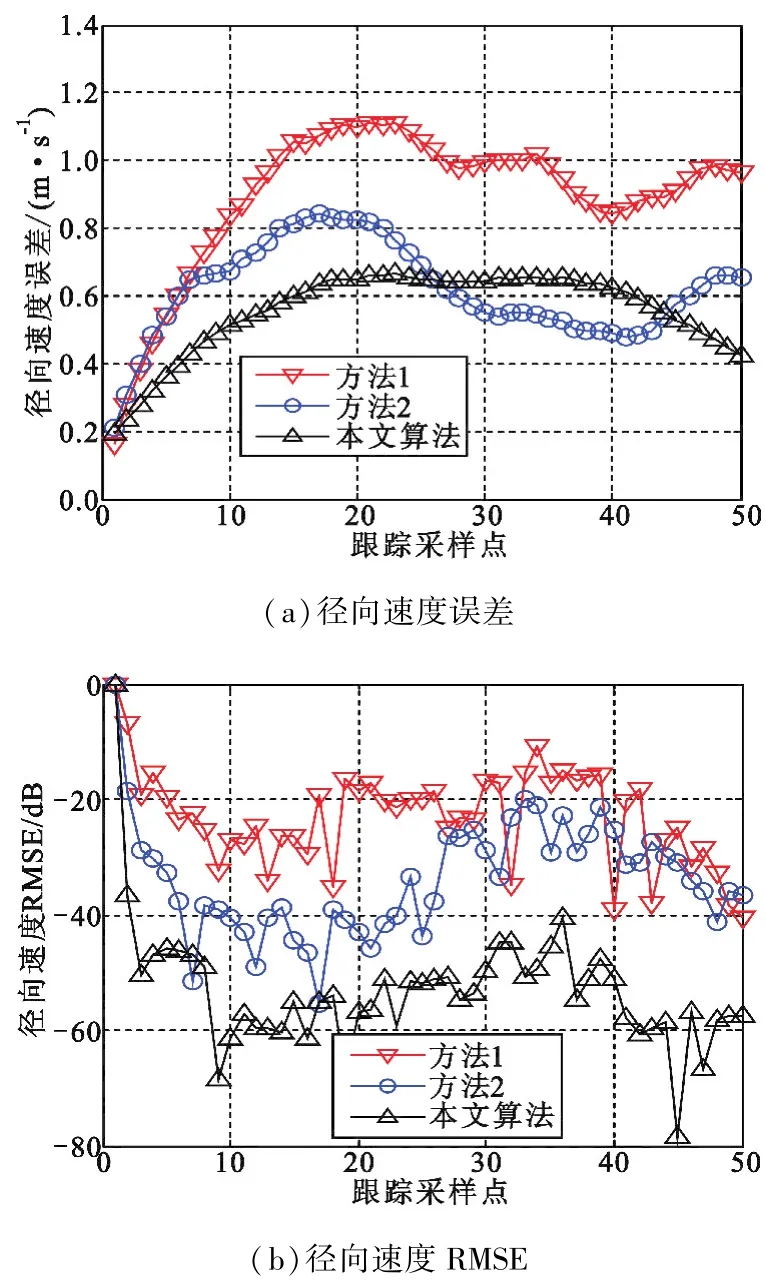
图7 跟踪算法误差对比Fig.7 Error curves of three methods
图7(a)中径向速度的误差计算,开始时速度误差小,这是因为航迹快速启动,速度与目标位置的初始值是真实目标初始状态量测值,后面的跟踪采样点误差增大,随着目标稳定航迹的建立速度误差趋于稳定。3种方法径向速度误差与跟踪点数的关系在图7(b)中已经给出,方法1、2和本文算法的速度误差最大值分别为1.11 m/s、0.84 m/s、0.67 m/s,改进的UKF滤波比方法1、2分别具有20%和10%的性能优势。目标航迹稳定后再开始计算目标径向速度与真实值的RMSE,在跟踪采样点数40处,动目标1、2航迹间距离最小,落入交叉波门内的量测点增多,径向速度误差短时间增大后趋于稳定,本文算法表现出稳定目标速度跟踪精度。如图7(b)所示,红色的曲线代表自适应的α-β滤波,蓝色、黑色的曲线分别代表传统JPDA-UKF滤波算法与基于运动补偿的 UKF滤波算法的径向速度归一化RMSE,相同的目标跟踪步数,本文算法比方法1、2拥有15 dB和10 dB的性能优势。对比3种方法的径向速度误差,蒙特卡洛仿真实验次数500次,相应的跟踪误差统计列于表1中,与方法1相比,本文方法的跟踪误差及方差更小;与方法2相比,本文方法的径向速度误差相近,但误差波动更趋平稳,跟踪精度更高。

表1 跟踪误差统计Tab.1 Tracking error statistics
5 结束语
雷达模拟器目标跟踪算法应该充分利用回波存储的优势,把目标跟踪算法转化为图像处理中的目标检测与跟踪,运动补偿法去除了相邻扫描周期内的回波图像冗余信息,极大简化了传统JPDA-UKF中的多目标多量测互联矩阵及概率计算复杂度。同时,运动状态估计中采用的软跟踪门技术提高了滤波算法的精度,能有效防止航迹管理中相近目标交叉运动时的粘连产生。仿真结果表明,在恒虚警条件下,本文算法的目标跟踪性能优于自适应α-β滤波,简化了传统JPDA-UKF杂波互联概率计算复杂度。利用目标的形状、运动信息降低目标粘连以及降低复杂度是下一步的研究方向。
[1] 李健勇,徐连宇.一种融合遮挡分割的多目标跟踪算法[J].电讯技术,2013,53(2):172-176. LI Jianyong,XU Lianyu.A multi-target tracking algorithm combined with occlusion segmentation[J].Telecommunication Engineering,2013,53(2):172-176.(in Chinese)
[2] TONG L,HEYMANN F,NOACK T.Radar target detection based on methods of image pattern matching[J].Scientific Journals,2013,36(108):162-167.
[3] 孙伟峰,纪永刚,张晓莹.基于自适应α-β滤波HFSWR海上目标航迹跟踪[J].海洋科学进展,2015,33 (3):394-402. SUN Weifeng,JI Yonggang,ZHANG Xiaoying.Ship target tracking based on adaptive α-β filter in HFSWR[J].Advances in Marine Science,2015,33(3):394-402. (in Chinese)
[4] 尹帅,袁俊泉,吴顺华.一种利用径向速度信息的改进JPDA算法[J].空军预警学院学报,2013,27(5):351-358. YIN Shuai,YUAN Junquan,WU Shunhua.Improved JPDA algorithm using radial velocity information[J].Journal of Air Force Radar Academy,2013,27(5):351-358. (in Chinese)
[5] MARESCA S,BRACA P,HORSTMANN J.Maritime surveillance using multiple high-frequency surface-wave radars[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(8):5056-5071.
[6] BRACA P,GRASSO R,VESPE M.Application of the JPDAUKF to HFSW radars for maritime situational awareness [C]//Proceedings of 2012 15th International Conference on Information Fusion.Singapore:IEEE,2012:2585-2592.
[7] 何友,修建娟,关欣,等.雷达数据处理及应用[M].3版.北京:电子工业出版社,2013. HE You,XIU Jianjuan,GUAN Xin,et al.Radar data processing with application[M].3rd ed.Beijing:Publishing House of Electronics Industry,2013.(in Chinese)
[8] BAR-SHALOM Y,DAUM F,HUANG J.The probabilistic data association filter estimation in the presence of measurement origin uncertainty[J].IEEE Control Systems Magazine,2009,29(6):82-100.

程 欢(1987—),男,湖南安乡人,2014年于长沙理工大学获工学硕士学位,现为助教,主要研究方向为信号处理与通信;
CHENG Huan was born in Anxiang,Hunan Province,in 1987.He received the M.S.degree from Changsha University of Science and Technology in 2014.He is now a teaching assistant. His research concerns signal processing and communication.
Email:yz_2394@qq.com
王方超(1984—),男,山东泰安人,2010年于重庆通信学院获工学硕士学位,现为助教,主要研究方向为图像和视频处理、无线电通信技术;
WANG Fangchao was born in Tai′an,Shangdong Province,in 1984.He received the M.S.degree from Chongqing Communication Institute in 2010.He is now a teaching assistant.His research concerns image&vedio processing and radio communication.
Email:272706918@qq.com
卢华平(1977—),男,江西人,副教授,主要研究方向为数字信号处理;
LU Huaping was born in Jiangxi Province,in 1977.He is now an associate professor.His research concerns digital signal processing.
Email:lu_huaping@163.com
李 斌(1966—),男,江苏泰州人,副教授,主要研究方向为无线电通信技术。
LI Bin was born in Taizhou,Jiangsu Province,in 1966.He is now an associate professor.His research concerns radio communication.
An Improved JPDA-UKF Method Based on Motion Compensation
CHENG Huan,WANG Fangchao,LU Huaping,LI Bin
(Command Department,Zhenjiang Watercraft College,Zhenjiang 212003,China)
In order to meliorate divergence,high complexity and poor real-time performance of the traditional maritime target tracking using the joint probabilistic data association with the unscented Kalman filter(JPDA -UKF)under the condition of constant false alarm rate,an improved JPDA-UKF based on motion compensation Cartesian plane is proposed.The method restricts the number of false measurements falling into the intersection area of the tracking gates using the confidential-matrix produced by motion compensation between the adjacent time-scan echo image.The tracking management adopts the popular logic method combining with the function of soft validation gates.Simulation results show that in comparison with the two algorithms developed via traditional JPDA-UKF and adaptive coefficient α-β filtering,the proposed algorithm gains an improvement of 10 percent and 20 percent radial velocity error and an improvement of 10 dB and 15 dB in velocity root mean square error(RMSE)after getting stable track management,and also the complexity of the method is in accordance with that of virtual real-time radar scanning and tracking processing.
radar simulator;target tracking;motion compensation;JPDA-UKF algorithm;α-β filter
1 引 言
海员培训、发证和值班标准国际公约(The International Convention on Standards of Training,Certification and Watchkeeping for Seafarers,STCW)在2012年对全功能航海模拟器提出了统一的新标准,对复杂条件下航海训练和海员培训发挥了重要的作用。现代导航雷达的一般功能是显示目标相对本船的距离以及目标所处的方位,而目标性质、运动目标的有关航行参数、目标临近或远离我方的数据需要自动雷达标绘仪(Automatic Radar Plotting Aids,AR-PA)功能实现,因此,ARPA目标跟踪的算法是全功能雷达模拟器研究的关键。雷达回波目标跟踪技术如基于图像处理的特征提取、目标检测方法[1-2]具备充实的理论基础,但计算流程复杂,计算时间较长,难以满足目标跟踪系统的实时性要求;自适应的α-β滤波[3]是速度最快的线性滤波之一,但在目标船机动条件下,容易丢失目标,并且当两个或两个以上目标在相近距离上运动到本船同一方位时会产生回波信号粘连现象。在高斯噪声存在的条件下,联合概率数据融合(The Joint Probabilistic Data Association,JPDA)与非线性滤波方法的结合[4-6]能提高目标位置估计精度并降低航迹起始的不确定性,但算法的性能取决于杂波密度及系统非线性程度。本文结合模拟器的回波数据记录功能,滤波模型采用不敏卡尔曼滤波器(Unscented Kalman Filter,UKF),对雷达模拟器手动录取目标跟踪。本文方法有以下几个创新点:目标运动状态估计利用“软跟踪门”技术,进行目标运动要素估计,能准确跟踪既定目标;基于运动补偿生成的量测可信度矩阵,能降低量测与目标互联概率的计算量,保证滤波的实时性。
**通信作者:yz_2394@qq.com yz_2394@qq.com
TN953
A
1001-893X(2016)11-1267-06
10.3969/j.issn.1001-893x.2016.11.015
2016-03-25;
2016-06-16
date:2016-03-25;Revised date:2016-06-16
引用格式:程欢,王方超,卢华平,等.一种利用运动补偿的改进JPDA-UKF算法[J].电讯技术,2016,56(11):1267-1272.[CHENG Huan, WANG Fangchao,LU Huaping,et al.An improved JPDA-UKF method based on motion compensation[J].Telecommunication Engineering, 2016,56(11):1267-1272.]