船载卫通站天线控制单元引导计算异常的解决*
2016-12-09魏春明
罗 岩,何 莹,魏春明
(1.中国卫星海上测控部,江苏江阴214431;2.泰州学院计算机科学与技术学院,江苏泰州225300)
船载卫通站天线控制单元引导计算异常的解决*
罗 岩**1,何 莹2,魏春明1
(1.中国卫星海上测控部,江苏江阴214431;2.泰州学院计算机科学与技术学院,江苏泰州225300)
某船载卫通站天线控制单元(ACU)在一次任务海域使用捷联惯导(SINS)作为数据源引导计算时出现了卫星捕获异常情况。针对该问题,从分析船载卫通站卫星捕获原理入手,详细比对了各类引导源的数据格式与异同点,结合以往工程经验进行问题排查定位,提出了相应的解决方案并完成了ACU软件的修改完善和测试验证。试验结果表明,采用所提方法,问题定位准确,解决方案简单有效、可行性强,可为类似问题的解决提供参考。
船载卫通站;天线控制单元;数据源;捷联惯导;引导计算
1 船载卫通站卫星捕获原理
船载卫通站是远洋通信的主要手段。当船舶在大洋上航行时,船载卫通站利用数据源传来的经纬度和航向角等信息计算出大地命令角,驱动天线进行卫星捕获,隔离船摇使天线波束始终对准卫星完成射频信号的发射和接收,保障岸船通信时刻畅通[1]。
1.1 卫星捕获原理
船载卫通天线大多采用三轴稳定、两轴跟踪体制[2]。三轴分别为方位轴(Azimuth,A轴)、俯仰轴(Elevation,E轴)和交叉轴(Cross,C轴)。两轴跟踪是指由单脉冲跟踪接收机完成E轴和C轴误差分解并转变为电压信号,经过A、E轴或者E、C轴跟踪回路对跟踪进行修正[3]。
卫星捕获过程可分为四个步骤:首先,根据数据源送来的经纬度和星址等信息计算在当前海域下天线捕获卫星应该转到的方位角和俯仰角(大地命令角);其次,驱动天线方位轴和俯仰轴转动至该大地命令角;然后,在此位置空间内一定区域按一定方式转动进行扫描;最后,在扫描期间若满足设定跟踪条件可自动切入自跟踪。
1.2 引导源数据格式及异同点分析
在现有设备条件下,船姿信息输入源有3种选择,分别是GPS/电罗经/倾角仪、人工置入和捷联惯导。
GPS/电罗经/倾角仪为最常用的一种数据源,稳定性好,精度一般,在海况恶劣的情况下,引导计算的大地命令角不够准确,天线捕获卫星的时间较长。
捷联惯导技术是将陀螺和加速度计直接固连在载体上的一种惯性导航技术,应用越来越广泛。捷联惯导的数据精度高,实时性较好。船载卫通站使用该数据源,天线对卫星的指向准确,捕获时间短。如果使用GPS/电罗经/倾角仪数据源天线长时间无法捕获卫星,可以考虑切换为捷联惯导数据源。ACU引入捷联惯导数据源进行卫星捕获,增加了一种引导手段,可提高冗余度和精确度。
在人工置入数据源下,需人工设置经纬度和航向角,可在其余两种数据源失效时应急使用。
2 问题的分析排查
2.1 问题描述
在某次任务准备阶段,船舶进入西经南纬后,设备人员发现采用捷联惯导数据源引导计算的大地命令角结果错误:在西经149°、南纬17°、航向角267°时,船载卫通站跟踪圆极化星183°E的大地命令角理论值,方位角和俯仰角命令值分别为299.04°和52.51°;采用GPS/电罗经/倾角仪数据源计算的结果方位角和俯仰角命令值分别为299.06°和52.52°;采用捷联惯导数据源计算的结果方位角和俯仰角命令值分别为113.62°和46.70°。通过比对分析发现捷联惯导数据源计算的结果错误。
2.2 问题定位
设备连接关系为捷联惯导数据先通过网线传输至ACU监控微机,再通过串口从ACU监控微机传输至ACU工控机,最后ACU工控机软件利用该数据进行处理,如图1所示。

图1 捷联惯导设备连接关系图Fig.1 Connection diagram of SINS devices
经过分析发现,在西经149°、南纬17°、航向角267°时采用捷联惯导数据源引导计算的大地命令角(方位角和俯仰角命令值分别为113.62°和46.70°)应为东经149°、北纬17°时的结果,此时ACU监控微机上显示接收捷联惯导数据正常。该问题在船舶处于东经和北纬时没有出现。
ACU工控机软件中接收捷联惯导数据的程序段如图2所示。
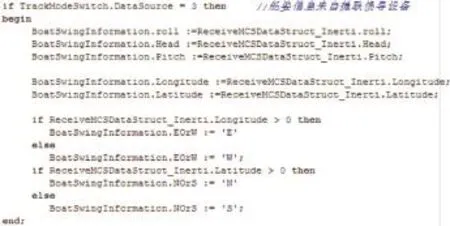
图2 ACU软件接收捷联惯导数据程序段Fig.2 Receiving SINS data program in ACU software
程序中,TrackModeSwitch.DataSource=3表示数据源选择捷联惯导。当数据源选择了捷联惯导后,捷联惯导(ReceiveMCSDataStruct_Inerti)的横摇角、纵摇角、航向角、经度和纬度信息直接赋值给ACU软件中的船姿信息(BoatSwingInformation)。同时,船姿信息中存在记录东西经(BoatSwingInformation.EOrW)和南北纬(BoatSwingInformation.NOrS)的变量。ACU监控微机传来的捷联惯导数据中经度取值为-180°~180°,-180°~0°表示船舶处于西经180°~0°,0°~180°表示船舶处于东经0°~180°;纬度取值为-90°~90°,-90°~0°表示船舶处于南纬90°~0°,0°~90°表示船舶处于北纬0°~90°。
ACU软件船姿信息中经度取值范围为0°~180°;纬度取值范围为0°~90°,并增加了记录东西经和南北纬的变量,如表1所示。
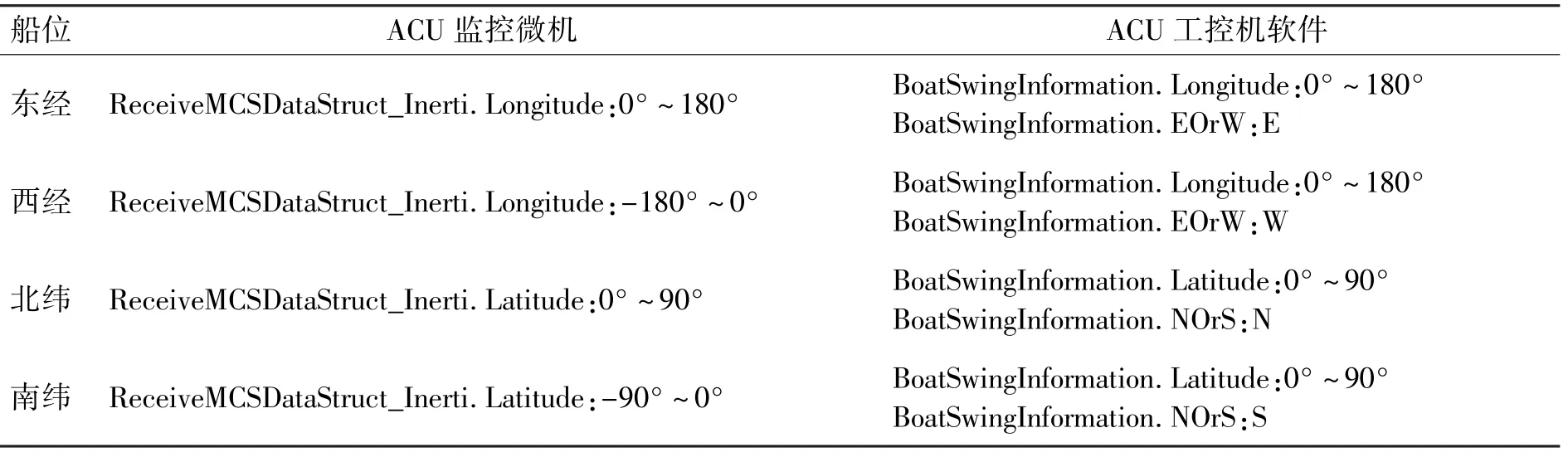
表1 捷联惯导在监控微机与ACU软件中的格式对比Tab.1 SINS data format comparison between monitor computer and ACU software
因为捷联惯导数据在监控微机和ACU工控机软件中的格式不同,所以在ACU软件接收捷联惯导数据的程序中,将监控微机捷联惯导的经度和纬度信息直接赋值给ACU软件船姿信息的方式不正确,是导致问题发生的根源。
当船舶在西经149°、南纬17°时,ACU监控微机中捷联惯导经度和纬度分别为 ReceiveMCSData-Struct_Inerti.Longitude=-149°和ReceiveMCSData-Struct_Inerti.Latitude=-17°,经过ACU工控机软件中接收捷联惯导数据的程序段处理后,船姿信息为BoatSwingInformation.Longitude=-149°、BoatSwing-Information.EOrW=W、BoatSwingInformation.Latitude =-17°和BoatSwingInformation.NOrS=S。在进行引导计算时,西经-149°、南纬-17°的计算结果为东经+149°、北纬+17°的大地命令角,而西经+149°、南纬+17°的计算结果才是正确的。综上,该问题得到了定位。
该问题会产生两方面的影响:一方面,船舶在西经或南纬,使用捷联惯导数据源卫星无法捕获;另一方面,使用捷联惯导数据源跟踪线极化星时,由于经纬度信息有误,导致命令极化角计算不正确,使得天线失锁。
3 解决措施与结果分析
该问题可通过修改ACU软件中接收捷联惯导数据程序的方法来解决——把原直接赋值变为条件判断赋值。当监控微机传来的捷联惯导经度大于0时,直接赋值;当其小于0时,乘以-1再赋值。纬度操作类似,如图3所示。
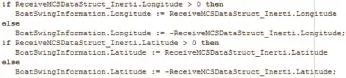
图3 修改后的接收捷联惯导数据程序段Fig.3 Modified receiving SINS data program
修改之后,当船舶在西经149°、南纬17°时, ACU监控微机中捷联惯导经度和纬度分别为ReceiveMCSDataStruct_Inerti.Longitude=-149°和ReceiveMCSDataStruct_Inerti.Latitude=-17°,经过ACU工控机软件中接收捷联惯导数据的程序段处理后,船姿信息为BoatSwingInformation.Longitude= 149°、BoatSwingInformation.EOrW=W、BoatSwingInformation.Latitude=17°和 BoatSwingInformation. NOrS=S,引导计算的结果为西经+149°、南纬+17°的大地命令角和极化角。
首先,使用原ACU软件该引导计算结果异常的问题可以得到复现。
其次,经过验证当船驶入西经或南纬时,修改后的ACU软件选择捷联惯导数据源大地命令角计算正确,天线能够正常捕获跟踪圆极化星183°E。在西经或南纬时,修改后的ACU软件大地命令极化角计算正确,船载卫通站跟踪线极化星134°E一切正常。
最后,经过多次验证,船舶在其他海域包括穿越赤道时,修改后的ACU软件选择捷联惯导数据源大地命令角计算正确,天线能够捕获卫星并正常跟踪。
4 结束语
本文介绍了船载卫通站卫星捕获原理和现有各数据源的特点,针对某船载卫通站进入西经南纬时天线控制单元使用捷联惯导数据源引导计算结果异常的问题进行了深入分析,详细论述了问题排查的过程,提出了相应的解决方案并对ACU软件进行了修改。试验结果验证了解决方案的正确性和有效性。修改后的ACU软件已在某船载卫通站应用。
该问题的产生是因为在老设备改造过程中对于软件版本前后不一致、部分情况等风险考虑不周,故在新设备投入使用或者老设备改造时,需针对软件的各类边界条件测试充分。该问题的排查过程可为解决类似问题提供参考。
[1] 瞿元新.航天测量船测控通信设备船摇稳定技术[M].北京:国防工业出版社,2009. QU Yuanxin.Anti-rocking technologies employed in TT&C and communication equipments on the space tracking ship[M].Beijing:National Defense Industry Press, 2009.(in Chinese)
[2] 林习良,周锦标,赵乾宏.E&C跟踪对极化角的影响及解决方法[J].电讯技术,2011,51(11):37-41. LIN Xiliang,ZHOU Jinbiao,ZHAO Qianhong.Solution to the influence of elevation&cross tracking mode on polarization angle[J].Telecommunication Engineering,2011, 51(11):37-41.(in Chinese)
[3] 王友强,刘峻,马云龙.船载卫通天线角度调整模式存在问题的分析与改进[J].电讯技术,2010,50(9):102-105. WANG Youqiang,LIU Jun,MA Yunlong.Problems of angle adjustment model in shipborne satcom station:investigation and amelioration[J].Telecommunication Engineering,2010,50(9):102-105.(in Chinese)
罗 岩(1989—),男,江西南昌人,2015年获硕士学位,现为工程师,主要研究方向为通信工程;
LUO Yan was born in Nanchang,Jiangxi Province,in 1989.He received the M.S.degree in 2015.He is now an engineer.His research concerns communication engineering.
Email:5luoyan@sina.com
何 莹(1985—),女,江苏泰州人,2011年获硕士学位,现为讲师,主要研究方向为通信工程;
HE Ying was born in Taizhou,Jiangsu Province,in 1985. She received the M.S.degree in 2011.She is now a lecturer. Her research concerns communication engineering.
魏春明(1982—),男,江苏靖江人,2004年获学士学位,现为工程师,主要研究方向为通信工程。
WEI Chunming was born in Jingjiang,Jiangsu Province,in 1982.He received the B.S.degree in 2004.He is now an engineer.His research concerns communication engineering.
Solution to Abnormal Calculation Problem of Antenna Control Unit in Shipboard Satellite Communication Station
LUO Yan1,HE Ying2,WEI Chunming1
(1.China Satellite Marinetime Tracking and Control Department,Jiangyin 214431,China;
2.School of Computer Science and Technology,Taizhou University,Taizhou 225300,China)
The problem occured that the antenna failed to track the satellite when antenna control unit (ACU)of shipboard satellite communication station used strapdown inertial navigation system(SINS)data source in a certain sea area.For this problem,this paper starts with analyzing the tracking principle of shipboard satellite station,compares the characteristics of each data source in detail,locates and detects the problem according to experience in engineering,proposes the corresponding solution and completes ACU software modification and test.The experiment results illustrate that the problem is located accurately,the solution is simple,effective and feasible,which can help to solve similar problems.
shipboard satellite communication station;antenna control unit;data source;strapdown inertial navigation system;leading calculation
某船载卫通站天线控制单元(Antenna Control Unit,ACU)在西经南纬海域使用捷联惯导数据源出现了卫星捕获异常情况。该问题是首次发现,并且船舶在东经北纬海域未出现。此时,监控软件上显示捷联惯导(Strapdown Inertial Navigation System, SINS)数据接收正常。通过试验选用不同数据源进行比对,发现使用捷联惯导数据源计算的大地命令角是错误的,故导致天线捕获异常。
为了准确了解该问题产生的原因,本文从分析船载卫通站卫星捕获原理入手,详细比对了各类引导源的数据格式与异同点,结合以往工程经验进行问题排查定位。
**通信作者:5luoyan@sina.com 5luoyan@sina.com
TN820
A
1001-893X(2016)11-1279-04
10.3969/j.issn.1001-893x.2016.11.017
2016-03-14;
2016-05-18
date:2016-03-14;Revised date:2016-05-18
引用格式:罗岩,何莹,魏春明.船载卫通站天线控制单元引导计算异常的解决[J].电讯技术,2016,56(11):1279-1282.[LUO Yan,HE Ying, WEI Chunming.Solution to abnormal calculation problem of antenna control unit in shipboard satellite communication station[J].Telecommunication Engineering,2016,56(11):1279-1282.]