无人机电控速度模糊PI双闭环控制仿真研究
2016-12-08漆海霞兰玉彬杨秀丽张铁民彭孝东
漆海霞, 兰玉彬, 杨秀丽, 张铁民, 彭孝东
(1 华南农业大学 工程学院,广东 广州 510642; 2 国际农业航空施药技术联合实验室/农业航空应用技术国际联合实验室/广东省农业航空应用工程技术研究中心,广东 广州 510642; 3 华南农业大学 电子工程学院,广东 广州 510642)
无人机电控速度模糊PI双闭环控制仿真研究
漆海霞1,2, 兰玉彬1,2, 杨秀丽1,2, 张铁民1,2, 彭孝东2,3
(1 华南农业大学 工程学院,广东 广州 510642; 2 国际农业航空施药技术联合实验室/农业航空应用技术国际联合实验室/广东省农业航空应用工程技术研究中心,广东 广州 510642; 3 华南农业大学 电子工程学院,广东 广州 510642)
【目的】 针对农用无人机作业时,对速度的稳定恒速需求,研究无人机无刷直流电机的速度控制模糊PI闭环算法。【方法】 分析无人机电控系统的结构原理,根据电控系统驱动无刷直流电机的速度控制要求,在Matlab/Simulink环境下,构建电控驱动无刷直流电机系统的仿真模型,采用速度电流双闭环控制策略,其中,速度环使用模糊PI控制器,电流环使用电流滞环控制。设置系统参数,进行仿真分析,搭建ARM电路仿真板,验证算法的有效性。【结果】 采用模糊PI后,该系统加快了速度响应,减少了系统超调量,提高了系统的抗干扰能力,提高了系统的动态特性和鲁棒性。【结论】 本研究提出的模糊PI控制策略是有效的,可为无人机实际电机控制系统设计和调试提供理论参考。
无人机电控调速; 无刷直流电机(BLDCM); 模糊PI控制器; 仿真模型
农用无人机按动力来源分为电动无人机和油动无人机;按机型结构分为固定翼无人机、单轴无人机、多旋翼无人机;按飞行方式分为助跑起飞无人机、垂直起落无人机等[1-2]。电动无人机稳定性高、易操控、节能环保[2]。电动机驱动的电动力农业机械是农业机械化发展的重要途径[3],电动无人机日益广泛应用在农业大田作业、畜牧业、农田信息检测、农业喷洒等生产环节[4]。无人机电控系统对其飞行性能起决定性作用。无人机的电机速度控制是实现无人机位置和姿态控制的关键。电动直升机电控系统由无刷直流电机(Brushless direct current motor, BLDCM)、控制器组成,通过对直流电机驱动的速度控制,可改善电控系统动态性能,增加系统稳定性。无人机电控算法主要采用传统的PID控制[5-10],BLDCM是一个多变量、非线性、时变的复杂系统,传统的PID控制,比例系数(Kp)、积分系数(Ki)、微分系数(Kd),可以分别调节系统的响应速度、控制精度、改善动态特性,但控制器参数Kp,Ki和Kd需要严格整定,且参数不能随被控对象变化而相应变化[11-13],否则难以达到控制要求;而模糊控制器不需要精确的系统的数学模型,对非线性系统有良好的控制性能。
本文对无人机电控系统的原理及结构进行了分析,通过仿真研究无刷直流电机的模糊PI双闭环速度调节器的性能,在分析无刷直流电动机结构原理、数学模型的基础上,借助Matlab/Simulink的功能模块,将无刷直流电动机模型和S函数相结合,搭建1个BLDCM控制系统的转速电流双闭环的控制仿真模型,转速环采用模糊PI控制算法,通过该模型仿真验证模糊PI算法与传统PID算法的差别;通过仿真运行搭建的电路,验证该模糊PI控制策略的有效性,可为BLDCM无人机电控速度的调节提供理论参考。
1 无人机电控系统
无人机的控制系统包括本地(机载) 控制回路和外部(地面)控制回路。机载控制回路控制无人机电驱动电机的速度,电控系统上位计算机输出PWM,给定速度,输入机载控制器,通过机载控制器的控制策略,输出电机驱动信号,BLDCM控制电机,其控制结构如图1所示。
本系统控制器采用模糊PI双闭环控制策略,速度环是外环,电流环是内环,转速调节器采用模糊PI控制,电流调节即电磁转矩调节,电流调节器采用电流滞环控制。双闭环调速系统的工作方式是:在启动时,只有电流负反馈,没有转速负反馈,以获得允许的最大电磁转矩,加快启动过程;达到稳态后,只有转速负反馈,没有电流负反馈,不让电流负反馈发挥主要作用,以获得希望的转速[14-16]。
2 BLDCM结构原理和数学模型
2.1 BLDCM结构原理
无刷直流电机由电机本体、位置检测传感器、逆变器3部分组成[17],其结构组成框图见图2。电机本体为永磁电机,其转子为永磁结构,产生气隙磁通,定子为电枢,定子结构与普通同步电机或感应电机相同,铁心中嵌有多相可接成星形或三角形的对称绕组,分别与逆变器中对应的开关管相连接。逆变器将直流电转变成交流电向电机供电,定子绕组通电相序与转子磁极的位置有关,位置检测传感器检测转子磁极相对于定子绕组的位置信号,为逆变器提供正确的换相信息[17]。
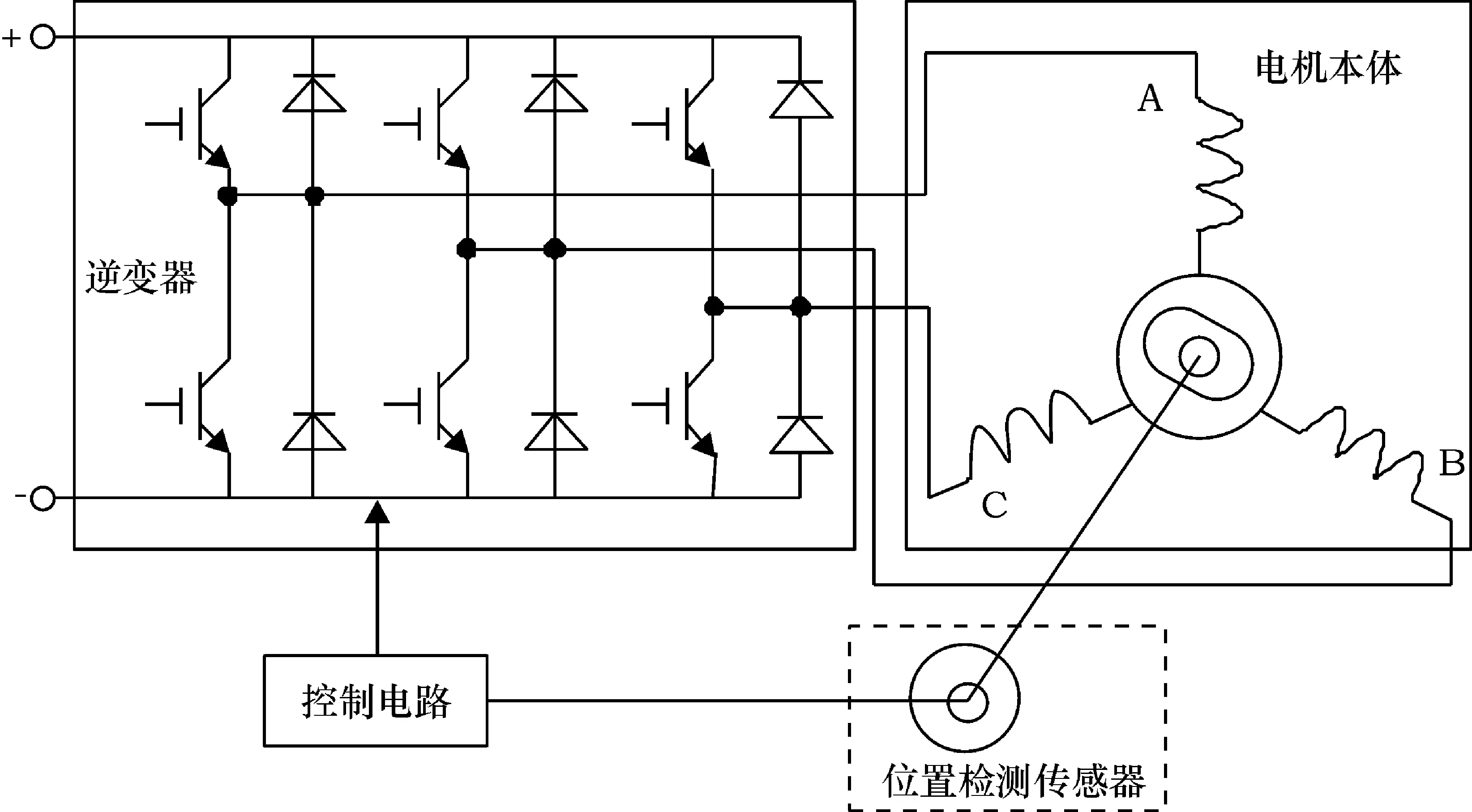
图2 无刷直流电机结构框图
无刷直流电机工作时,控制电路对转子位置传感器检测的信号进行逻辑变换后产生脉宽调制PWM信号,经过放大送至逆变器各功率开关管,从而控制电动机各相绕组按一定顺序通电,在电机气隙中产生跳跃式旋转磁场,定子磁场与转子永磁场相互作用,驱动转子转动。
2.2 BLDCM数学模型
为简化分析BLDCM的数学模型以及电磁转矩等特性[18],假设电机有以下特性:三相绕组完全对称,电枢绕组在定子内表面均匀连续分布; 定子电流、转子磁场对称分布,气隙磁场为方波;忽略电枢反应的影响;磁路不饱和,涡流和磁滞损耗忽略不计;忽略齿槽的影响。
根据BLDCM的特性,建立无刷直流电机的数学模型。
2.2.1 电压方程 无刷直流电机的定子电压平衡方程式为[17,19]:
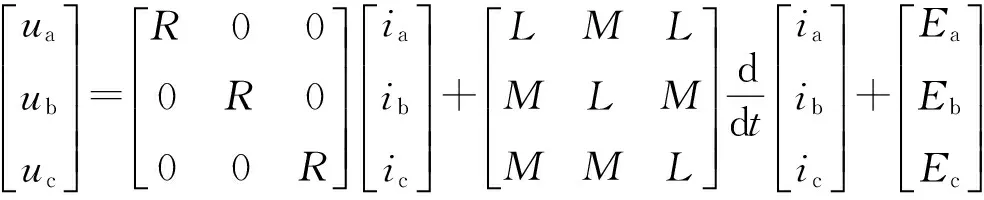
当三相绕组为星形连接,且没有中线,则:
ia+ib+ic=0,
Mia+Mib=-Mic,
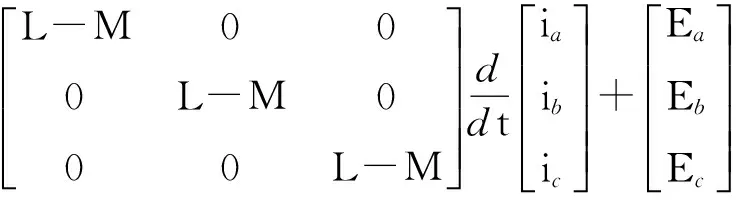
将其代入定子电压平衡方程式,得到电压方程:
2.2.2 等效电路 以无刷直流电机常用的两相导通星形三相六状态工作方式为例。三相对称的电机定子绕组自感和互感为常数。则该无刷电机的定子等效电路如图3所示。
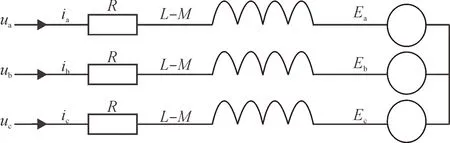
图3 无刷直流电机等效电路
2.2.3 转矩方程 无刷直流电机定子绕组产生的电磁转矩表达式为:
另外转子运动方程为:
式中,ω为电机角速度(rad·s-1);J为电机转动惯量(kg·m2);B为系统阻尼系数(N·m·s·rad-1);Tl为负载转矩(N·m)。
3 无刷直流电机双闭环建模
3.1 无刷直流电机双闭环仿真设计
在Matlab7.8的环境下,利用Simulink提供的Simpowersystemtoolbox模块库,结合无刷直流电机数学模型,建立无刷直流电机控制系统的仿真模型。无刷直流控制仿真系统由功能模块连接而成,主要模块包括电机本体模块、逆变器模块、PWM模块、参考电流模块、速度调节模块、电流控制模块、位置传感器模块和转矩计算模块。各功能模块与S函数相结合,搭建BLCDM的Matlab仿真模型,如图4所示。
3.2 速度调节器模块
PID控制算法是常用的电机控制算法,其作用是通过调节比例系数Kp、积分系数Ki、微分系数Kd,提高电机的控制精度和稳定性,Kp的作用是对偏差作出快速反应,减少超调,Ki的作用是消除稳态误差,Kd的作用是减少超调,克服振荡,使系统稳定。但传统PID控制参数不能根据被控对象参数变化做出相应的调整,没有好的鲁棒性[11][19]。

图4 无刷直流控制系统Matlab仿真模型
模糊PI控制器改变了传统PI控制器的固定参数Kp、Ki的控制策略,提出了可以根据跟踪误差信号等动态改变控制器参数的方法,采用模糊PI控制的速度调节器,其系统结构如图5所示,由参数可调PI调节器和模糊推理系统2部分构成[20],误差e和误差变化率ec作为输入,输入模糊推理系统以通过模糊推理,对PI参数ΔKp和ΔKi在线整定, 整定后的ΔKp和ΔKi输入PI调节器,实现对系统的控制;模糊推理输出的ΔKp和ΔKi可以满足不同的误差e和误差变化率ec对控制器参数的不同要求,把PI控制的简便性与模糊控制的灵活性以及鲁棒性融为一体,使被控对象具有良好的动态和静态控制性能。达到改善控制效果、扩大应用范围的目的。

图5 模糊PI控制器结构图
3.2.1 输入语言变量的确定 将速度偏差e和偏差变化率ec作为模糊PI控制器的输入语言变量,ΔKp、ΔKi作为其输出的语言变量。
3.2.2 隶属函数的确定 确定各语言变量e、ec、ΔKp、ΔKi的论域均为(NB,NM,NS,ZO,PS,PM,PB)。
e的语言取值是(-6,-4,-2,0,2,4,6);ec的语言取值是(-3,-2,-1,0,1,2,3);Kp的调整参数ΔKp的语言取值是(-0.6,-0.4, -0.2, 0, 0.2,0.4,0.6);Ki的调整参数ΔKi的语言取值是(-0.3,-0.2,-0.1, 0,0.1,0.2,0.3)。隶属函数均采用三角形。
3.2.3 模糊规则的确定 根据ΔKp和ΔKi的控制规则表(表1),设置7×7=49个规则。在模糊推理系统编辑界面中选择Edit-> Rules菜单项,使用If,then语句进行规则语句编写,将规则逐一输入该界面,建立好模糊规则后,可以由View->Surface观察得到模糊推理规则曲面。

表1 ΔKp和ΔKi的控制规则表
3.2.4 模糊推理和反模糊化 模糊推理采用Mamdani型推理方法,将多条规则的结果合成以后,对每一个输出模糊集合运用重心法进行解模糊计算,得到最终的模糊控制查询表。
3.2.5 仿真电路设计 在Simulink中调用模糊逻辑控制器,构建模糊PI控制器的仿真电路如图6所示。

图6 模糊PI控制器仿真电路
3.3 电流调节器设计
采用电流滞环控制的电流调节器,给定频率和幅值的正弦电流信号由给定电路或者微控制器产生,并与实际检测电流信号进行比较,控制逆变器该相上桥臂的电力电子开关的通断。该方法的优点是电路简单、动态性能好、输出电压不含特定频率的谐波分量;其缺点是开关频率不固定造成较为严重的噪音,输出电流中所含的谐波较多。
4 仿真试验分析
构建无刷直流电机仿真系统后,分别对电机控制系统和模糊控制系统设置仿真参数,进行仿真分析。设电机由200 V直流电源供电,极对数p=1,电机额定转速为1 200 r/min,仿真时,参数设置如下:定子绕组电阻R=1 Ω,定子绕组自感L=0.02 H,互感M=-0.006 1 H,反电势系数K=0.382,转动惯量J=0.005 kg·m2,阻尼系数B=0.0002 N·m·s·rad-1。滞环环宽h=2,仿真算法采用ode32tb,采样周期设为0.000 1 s,仿真时间为0.4 s。
模糊控制系统相关参数设置:Kp=2,Ki=1,限幅Imax=50,Ke=0.006,Ke2为ΔKp的取值范围0.6,Kec=0.001 5,Kec2为ΔKi的取值范围0.3。ΔKp的输出系数=Kp/Ke2,ΔKi的输出系数=Ki/Kec2。
传统PI控制系统的参数Kp=2,Ki=1,限幅Imax=30。
4.1 模糊PI控制器效果分析
仿真分析电机控制系统和模糊控制系统过程中,设置在0.02 s时加上一个5 N·m的阶跃负载,电磁转矩响应曲线见图7,模糊PI控制器和传统PI控制器速度响应曲线见图8。综合图7、8波形可以看出:起动时电流和转矩都很大,转速在0.03 s内上升至最大值,存在超调,系统响应迅速且平稳,起动阶段系统有较大的转矩,且保持恒定。
从图8所示速度响应仿真曲线可以看出模糊PI控制的转速响应较快,超调量较少,在0.02 s时受到负载突变时,速度响应曲线波动较少,能较快恢复到额定转速,说明其抗干扰能力强,具有良好的动态特性,能大大提高无刷直流电机控制系统的鲁棒性。仿真试验结果表明,模糊PI控制器下的无刷直流电机控制系统稳定性较好。
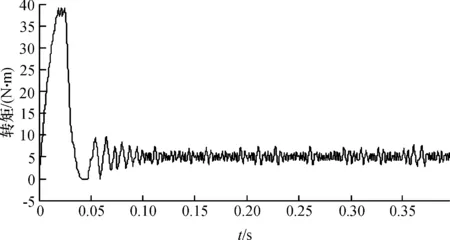
图7 电磁转矩响应曲线
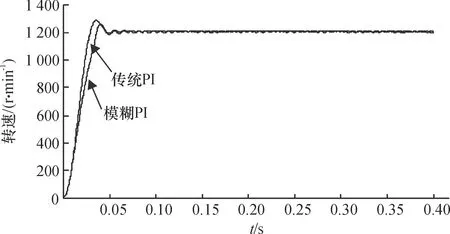
图8 模糊PI控制器与传统PI控制器速度响应曲线
4.2 电路仿真
为进一步验证理论的正确性,本研究设计了基于AT91SAM9261工业级ARM的数字化无刷直流电机调速系统。AT91SAM9261根据模糊PI控制器计算结果输出PWM控制信号,逆变电路根据提供的PWM信号顺序导通功率开关管,驱动电机运转。同时,为便于闭环,在电机转子上同轴安装增量式光电编码器,编码器输出经鉴相计数电路处理后送入主控ARM。
鉴相电路由1个D触发器和2个与非门组成,计数电路用3片74LS193组成。计数结果输出D0~D11送至ARM外部数据总线上,主控ARM定时读取计数输出,完成转速测量。
为直观查看试验结果,选用4.3寸(480像素×272像素)带触摸屏TFT液晶显示屏作为输入输出设备。按照前文所设条件进行试验,额定转速设置为1 200 r·min-1时,测量结果为1 210 r·min-1,可以看出调速系统试验结果与Matlab仿真结果保持一致,从而在理论和试验两方面均验证了本文提出的控制策略的有效性。
5 结论
本文分析了无人机电控系统的原理结构,分析了其驱动电机无刷直流电机的工作原理、数学模型和控制系统的控制方法,利用Matlab/Simulink工具箱结合S函数进行了基于模糊PI控制的无刷直流电机速度电流双闭环控制系统仿真模型的建立。系统中,速度环采用模糊PI控制器,电流环采用电流滞环控制。与采用传统PI控制器系统相比,该系统加快了速度响应、减少了系统超调量、提高了系统的抗干扰能力、提高了系统的动态特性和鲁棒性。同时,通过搭建电路仿真及仿真试验,证实了该控制策略的有效性。在此仿真模型基础上, 可以方便地实现多种控制算法和控制策略, 可为无人机电控系统设计和调试提供理论指导。
致谢:感谢北京航空航天大学王青老师给予的支持和帮助!
[1] 何勇,张艳超. 农用无人机现状与发展趋势[J]. 现代农机, 2014(1):1-5.
[2] 蔡红专,牟涛,刘静超,等.一种农用喷洒无人机飞控系统的设计[J].农业与技术, 2015, 35(17): 41- 43.
[3] 张铁民,闫国琦,温利利,等. 我国电动力农业机械发展现状与趋势[J]. 农机化研究, 2012, 34(4): 236-240.
[4] 凌云.无人飞机在农业生产中前景无限[J].农业机械,2013(4):81- 83.
[5] 胡琼. 无人驾驶航空飞行器飞行控制方法研究[D]. 北京:北京理工大学,2015.
[6] 谷永晟,杨建军,朱宇虹. 四旋翼无人飞行器导航控制系统研究[J]. 遥测遥控, 2012, 33(3):68-73.
[7] 朱兖植. 小型农用无人直升机飞行控制技术研究[D]. 南京:南京航空航天大学, 2013.
[8] 李一波,李振,张晓东. 无人机飞行控制方法研究现状与发展[J]. 飞行力学, 2011, 29(2): 1-9.
[9] 李一波,宋述锡. 基于模糊自整定PID四旋翼无人机悬停控制[J]. 控制工程, 2013, 20(5):910-914.
[10]胡庆. 基于STM32单片机的无人机飞行控制系统设计[D]. 南京:南京航空航天大学, 2012.
[11]王葳,闫国琦,温利利,等. 我国电动力农业机械发展现状与趋势[J]. 农机化研究, 2012, 34(4): 236-240.
[12]EDAN Y,ENGEL B A, MILES G E.Intelligent control system simulation of an agricultural robot [J]. J Intel Robot Syst, 1993, 8(2):267-284.
[13]RYSZARD J,TOMAB. Mechatronics recent technological and scientific advances (XIV)[M].Berlin:Springer-Verlag, 2012:795.
[14]纪志成,沈艳霞,姜建国. 基于Matlab无刷直流电机系统仿真建模的新方法[J]. 系统仿真学报, 2008,15(2):1745-1750.
[15]BABAEI A R. Classical and fuzzy-genetic autopilot design for unmanned aerial vehicles[J]. Appl Soft Comput,2011,11(1): 365-372.
[16]SEFER K,OMER C,OKYAY K. Fuzzy logic based approach to design of flight control and navigation tasks for autonomous unmanned aerial vehicles[J]. J Intel Robot Syst, 2009, 54(1): 229-224.
[17]孙建忠,白凤仙. 特种电机及其控制[M]. 北京:中国水利水电出版社, 2005: 6-28.
[18]殷云华,郑宾,郑浩鑫. 一种基于Matlab 的无刷直流电机控制系统建模仿真方法[J]. 系统仿真学报, 2008, 20(2): 293-298.
[19]陈欢. 直流无刷电机的建模与仿真[J]. 舰船电子工程, 2010, 30(2): 123-125.
[20]张浩. 基于DSP的无刷直流电机控制器设计与仿真[J]. 武汉理工大学学报(信息与管理工程版), 2009, 30(1): 51-54.
【责任编辑 霍 欢】
Unmanned aerial vehicle speed control simulation study based on fuzzy PI double closed loop control
QI Haixia1,2, LAN Yubin1,2, YANG Xiuli1,2, ZHANG Tiemin1,2, PENG Xiaodong2,3
(1 College of Engineering, South China Agricultural University, Guangzhou 510642, China; 2 International Laboratory of Agricultural Aviation Pesticide Spraying Technology/International Laboratory of Agriculture Aviation Applied Technology/ Engineering Research Center for Agricultural Aviation Application of Guangdong Province, Guangzhou 510642, China; 3 College of Electronic Engineering, South China Agricultural University, Guangzhou 510642, China)
【Objective】Fuzzy PI closed loop control algorithm was studied for constant speed demand in agricultural unmanned aerial vehicle (UAV) operations.【Method】The principle and structure of the UAV electrical control system was analyzed in this paper. According to the requirement of electrical control system for brushless direct current motor (BLDCM) speed adjustment, the simulation model of BLDCM control system was established in Matlab/Simulink software environment. Double closed loop control of speed and current was applied with fuzzy PI speed control and current hysteresis control. Simulation analysis was conducted with defined systematic parameters. The ARM circuit simulation board was built to verify the effectiveness of the algorithm.【Result】Simulation results proved that the BLDCM control system had improved response speed, reduced overshoot, and higher anti-disturbance capacity with fuzzy PI control. In addition, the dynamic behavior and robustness ability of the system were improved as well.【Conclusion】This study proves effectiveness of the fuzzy PI closed loop contriol algorithm and provides theoretical reference for real UAV control system design and debugging.
electrical speed control of UAV; brushless direct current motor (BLDCM); fuzzy PI controller; simulation model
2016- 07- 22 优先出版时间:2016-10-24
漆海霞(1969—),女,副教授,博士,E-mail:qihaixia_scau@126.com;通信作者:兰玉彬(1961—),男,教授,博士,E-mail: ylan@scau.edu.cn
国家重点研发计划项目(2016YFD0200700);广东省科技计划项目(2014A020208107,2015B050501009);
TP391.1; S252.9
A
1001- 411X(2016)06- 0031- 07
优先出版网址:http://www.cnki.net/kcms/detail/44.1110.s.20161024.1041.020.html
漆海霞, 兰玉彬, 杨秀丽, 等.无人机电控速度模糊PI双闭环控制仿真研究[J].华南农业大学学报,2016,37(6):31- 37.
