我国下一代列车控制系统的展望与思考
2016-12-08张亚东王长海
郭 进,张亚东,王长海,查 志,高 豪
GUO Jin1, ZHANG Ya-dong1, WANG Chang-hai2, ZHA Zhi1, GAO Hao1
(1.西南交通大学 交通信息工程及控制重点实验室,四川 成都 610031;2.中国铁路总公司
安全监督管理局,北京 100844)
(1.Key Lab of Communication Engineering and Control, Southwest Jiaotong University, Chengdu 610031, Sichuan, China; 2.Safety Supervision Administration, China Railway, Beijing 100844, China)
我国下一代列车控制系统的展望与思考
郭 进1,张亚东1,王长海2,查 志1,高 豪1
GUO Jin1, ZHANG Ya-dong1, WANG Chang-hai2, ZHA Zhi1, GAO Hao1
(1.西南交通大学 交通信息工程及控制重点实验室,四川 成都 610031;2.中国铁路总公司
安全监督管理局,北京 100844)
(1.Key Lab of Communication Engineering and Control, Southwest Jiaotong University, Chengdu 610031, Sichuan, China; 2.Safety Supervision Administration, China Railway, Beijing 100844, China)
为进一步优化、简化列控系统结构、提升列控系统自动化水平、提高不同线路等级间的互联互通、缩短列车追踪间隔,通过分析欧洲下一代列控系统的研究现状和我国列控系统存在的问题,提出我国下一代列控系统的发展目标,构建下一代列控系统模型。在此基础上,充分考虑国际标准的适应性,研究我国下一代列控系统若干关键技术问题,利用新技术进一步提高铁路运输自动化水平和效率,为实现高速铁路“走出去”发展战略提供技术支撑。
高速铁路;下一代列车控制系统;系统模型;关键技术
随着列车速度提高、追踪间隔缩短,特别是高速铁路的发展,世界各国相继研究开发了列车运行控制系统 (简称“列控系统”),完成列车位置的检查、调整列车运行间隔、控制列车的制动系统等功能,其中高速铁路列控系统一般由地面设备、车载设备、信息传输通道等构成[1]。目前,我国研制的 CTCS-2 级列控系统已经成功应用于 160 km/h 提速线路和 200~250 km/h 客运专线,CTCS-3D 级列控系统应用于京津城际铁路,CTCS-3级列控系统应用于 300 km/h 以上的高速铁路[2-3]。由于列车高精度自主定位技术和车-地大容量无线通信技术逐步成熟,基于通信的列车控制系统 (Communication Based Train Control System,CBTC) 得到快速发展,并广泛应用于城市轨道交通系统。尽管如此,我国铁路列控系统与欧洲列控系统相比,仍然存在制式不兼容、列车不能转线作业、系统结构复杂、轨旁设备过多、建造与运维成本高、维修难度大等问题。针对列控系统普遍存在的问题,结合无线通信、卫星定位、自动控制等信息技术在列控系统的应用,国内外学者广泛开展了下一代列车控制系统 (Next Generation Train Control System,NGTCS) 研究[4-7]。
1 欧洲下一代列车控制系统研究现状
从 1980年开始,欧洲率先应用列车高精度定位技术和无线通信技术开发了 CBTC,具有较高的自动化程度,实现列车自动驾驶。同时,该系统还可以实现移动闭塞,列车追踪间隔可以达到90 s,已经逼近理论最小间隔的极限[8]。在铁路干线方面,欧洲列车控制系统 (European Train Control System,ETCS) 在在技术通用性、功能标准化等方面取得成功,形成 ETCS-0 至 ETCS-3 的技术标准,实现了列车与地面信号系统全面的互联互通[9]。
1.1欧洲 NGTCS 项目研究内容
随着综合交通运输客运市场机制的逐渐完善,铁路干线与城市轨道交通面临着新的机遇与挑战,衍生出铁路干线提升运输能力及自动化水平、城市轨道交通与铁路干线之间的转线等诸多问题。由于铁路干线列控系统及 CBTC 的技术差异较大,还产生了各种列控系统软硬件不兼容、互换困难、市场化竞争不充分等问题。为此,欧洲于 2013年开始启动 NGTCS 项目研究,由欧洲多家企业 (Alstom,Ansaldo STS,AŽD,CAF,Thales,Siemens 及Bombardier) 及专家共同参与。NGTCS 项目研究内容如图1 所示。

图1 NGTCS 项目研究内容
欧洲 NGTCS 项目共建立了 9 个任务组,主要研究内容如下。①分析 ETCS 系统与 CBTC 的共同点与差异性,提出一套适用于铁路干线及城轨的功能需求和技术规范;②借鉴 CBTC 经验,研究铁路干线移动闭塞原则;③研究基于互联网协议 (IP) 的无线通信新技术及在 NGTCS 应用的可行性;④研究卫星定位技术及在 NGTCS 应用的可行性,根据铁路干线和城市轨道交通对列控系统的共同、核心的技术需求,研究 NGTCS 的系统结构、硬件平台,达到可互操作和互交换的目标;⑤提供铁路干线、城市轨道交通、市郊铁路互联的解决方案。通过 NGTCS 研究,铁路干线与城市轨道交通列控系统硬件平台将在技术上减少差异,趋向一致。铁路干线与城市轨道交通列控平台发展趋势如图2 所示。
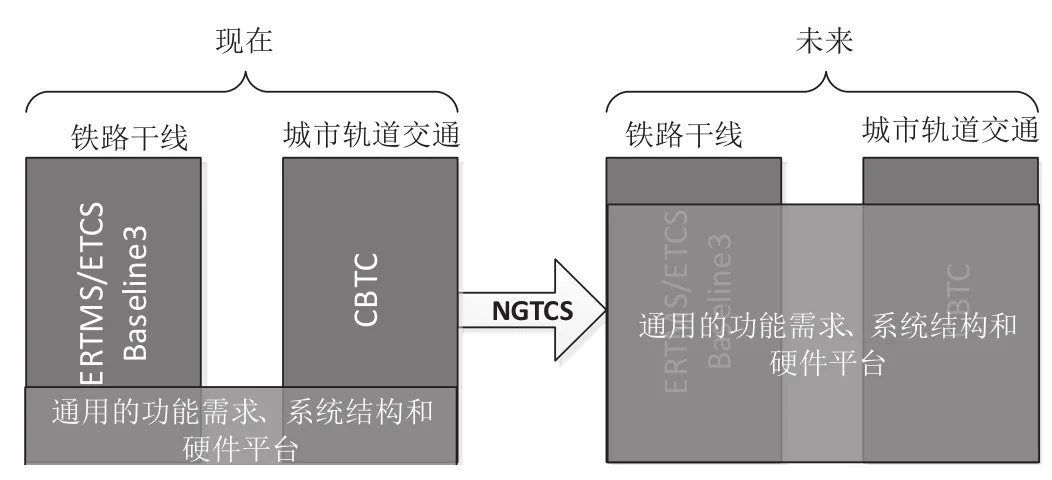
图2 铁路干线与城市轨道交通列控平台发展趋势
1.2欧洲 NGTCS 研究方法
欧洲 NGTCS 项目的目标是减少铁路干线列控系统与 CBTC 两者之间技术的差异,形成共同的功能需求规范;开发不同设备的标准化结构及接口(包括地面设备及车载设备),增加设备互换性及互操作性;设计适用范围更广的产品,实现铁路干线与城市轨道交通之间的互联互通转线功能;提高铁路干线列控系统自动化水平和线路通过能力,降低信号设备安装、维护成本,提高系统可靠性。因此,欧洲 NGTCS 研究方法如下。
(1)改进 ETCS 信息编码,使其成为更加标准化的编码,以便支持更多功能,具备城市轨道与铁路干线转线的能力,如缩短追踪间隔、移动闭塞等。
(2)简化铁路干线列控系统结构,提高铁路线路能力,减少信号安装及维护成本,提高可靠性及可用性。
(3)采用城市轨道与铁路干线共同的方法,以城市轨道交通实际经验为基础,同时考虑现有ETCS 标准,定义通用移动闭塞概念及原则,以便适应不同类型的铁路。
(4)分析调查以 IP 为基础的无线通信不同技术,一是确定城市轨道交通与铁路干线列控系统以 IP 为基础无线通信的共同需求;二是利用现有无线通信技术,制定适用于 NGTCS 的无线通信解决方案。
(5)研究卫星定位技术取代应答器的可行性,基于 ETCS 应用,主要面向相对简单的线路布置及具有良好卫星接收环境的低密度线路,研究标准的卫星定位功能应用,取消安装物理定位应答器。
(6)研究 NGTCS 与 ETCS 及 CBTC 标准的兼容性,减少设备改造费用。
(7)在 ETCS 与 CBTC 一致性和差异分析基础上,开发共同的系统结构、功能分配与接口。
2 我国下一代列控系统研究
2.1现状
为了适应我国高速铁路建设发展需要,我国高速铁路列控技术借鉴 ETCS 成功经验,从无到有取得了飞跃发展。2003年 10月,原铁道部发布了《中国列车运行控制系统 CTCS 技术规范总则 (暂行)》;2008年 4月,基于轨道电路和应答器的CTCS-2 级列控系统在合宁客运专线应用后,又大规模应用于提速干线及 200~250 km/h 高速铁路;2008年 8月1日,CTCS-3D 型列控系统在京津城际应用,可以为最高速度 350 km/h 的高速铁路列车运行提供支持;基于无线通信的 CTCS-3 级列控系统成功应用于武广 (武汉—广州)、郑西 (郑州—西安)、京沪 (北京—上海) 等 300~350 km/h 高速铁路。在此基础上,针对我国 NGTCS 的研究,主要考虑列控系统应采用新技术精简和优化列控系统结构、减少投资与维护成本等因素,为各种形式的轨道交通提供互联互通条件,为方便旅客出行提供技术支持。因此,我国 NGTCS 应考虑解决以下主要问题。
(1)列车在不同线路转线运行缺乏标准化。主要包括 CTCS-3 与 CTCS-2、CTCS-2 与既有线、CTCS-3 与既有线、铁路干线与城际铁路、铁路干线与城市轨道交通相互转线问题。
(2)列控系统设备不合理冗余。目前,我国铁路干线存在 CTCS-3 车载设备冗余 CTCS-2 车载设备、CTCS-2 车载设备冗余 LKJ 车载设备、CTCS-3 地面设备冗余 CTCS-2 地面设备等不合理冗余设置问题,导致建设与运营维护成本高、维护难度大等。
(3)轨旁设备过多。现有列控系统轨旁设备包括大量轨道电路、有源、无源应答器及其他设备,加大了建设安装成本,使得维修、养护工作量增加。
(4)地面设备系统复杂。由于功能分配不尽合理,现有列控系统地面设备系统比较复杂,包括联锁系统、列控中心、无线闭塞中心、临时限速服务器、信号安全数据网等,导致设备相互间协调较为复杂。
(5)自动化级别低。现有列控系统主要完成列车超速防护功能,还不能实现列车自动驾驶等高级自动化功能,列车优化驾驶等功能亦无法实现。
(6)移动闭塞还未实现。现有列控系统采用准移动闭塞技术,追踪间隔受到限制,导致不能进一步缩短追踪间隔,影响运输效率的提高。
2.2发展目标
(1)研发国际化通用、标准化的报文编码、结构及接口模块及列控车载设备,增强设备的互换性及互操作性,减少冗余,支持列车在不同 CTCS 级别的高速铁路 (客运专线)、既有线、城际及城市轨道交通线路上进行转线运行,实现高速铁路走出去战略。
(2)优化列控地面设备系统结构,突破原有调度、列控、联锁等系统相互独立的限制,实现以列控车载设备为主体的优化精简的系统结构。
(3)实现基于北斗卫星定位系统的列车定位,减少轨旁应答器数量,逐步减少直至取消区间轨道电路。
(4)实现高速铁路列车自动驾驶和智能驾驶,提升列控系统的自动化水平。
(5)铁路干线应用移动闭塞技术,进一步缩短追踪间隔,提高运输效率。
(6)应用无线通信新技术,如 LTE-R、以 IP为基础的无线通信技术等,提高列控系统车-地通信的传输带宽及传输可靠性指标。
2.3NGTCS 模型
根据我国 NGTCS 的发展目标,我国下一代列控系统模型如图3 所示。
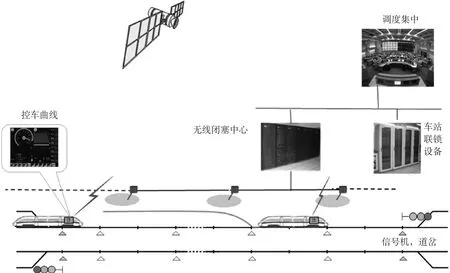
图3 我国下一代列控系统结构模型
2.3.1车载设备组成及功能
车载设备包括车载安全计算机、无线通信模块、卫星定位模块。
(1)车载安全计算机。完成车载列车自动防护(ATP)、列车自动驾驶 (ATO) 的功能,在原有 ATP 的基础上增加 ATO 功能,实现列车自动驾驶;在不增加搭载冗余设备的基础上,支持列车在不同 CTCS 级别、既有线、城际及城市轨道交通线路上进行转线运行;采用移动闭塞技术,实现移动闭塞。
(2)无线通信模块。用于与地面设备进行连续大容量双向无线通信,交互移动授权和列车运行参数等数据。在原有 GSM-R 接收模块基础上,增加LTE、WLAN 等可选择的标准化接口模块,便于列车根据不同地面无线通信设备进行自动选择。另外,应当具备基于 IP 技术无线通信方式。
(3)卫星定位模块。车载部分增加基于北斗卫星系统的卫星定位模块,采用卫星定位及应答器定位相结合的方式,在卫星定位条件比较好的地方尽量减少安装定位应答器,减少轨旁设备。
2.3.2地面设备组成及功能
地面设备包括无线闭塞中心、车站联锁设备、下一代无线通信系统。
(1)无线闭塞中心。负责移动授权计算、临时限速管理等功能,将移动闭塞技术应用于铁路干线,进一步缩短追踪间隔,提高运输效率。
(2)车站联锁设备。根据调度集中指令,实现道岔及信号控制。
(3)下一代无线通信系统。采用基于IP的 4G 或 5G 无线通信技术,实现车-地之间大容量双向无线通信,提高车-地通信的传输带宽及传输可靠性指标。
2.4关键技术问题
2.4.1设计适用范围广的系统结构
轨道交通按照用途可以分为客运专线、客货混跑、货运铁路、城际铁路及城轨交通;按照速度可以分为普速铁路、提速干线,200~250 km/h、300~350 km/h高速铁路。目前,我国存在多种列控系统制式及技术标准,铁路干线列控系统分为 CTCS-0、CTCS-1、CTCS-2、CTCS-3,城市轨道交通多为不同类型的 CBTC。多种列控系统功能大同小异,但系统结构差异较大,既影响列车跨线运营,也不利于技术发展和市场化竞争。因此,应认真分析不同轨道交通形式对列控系统不同的功能需求和技术规范,识别一致性和差异性,确认共同的、核心的功能需求,在此基础上,设计适用范围广的我国 NGTCS 的系统结构,减少不同线路列控系统技术的差异,形成共同适用的功能需求规范。然而,由于环境与需求差别,也不可能追求完全统一的列控系统结构。例如,城市轨道交通可以使用信标定位方式,接收条件好的地方可以使用卫星定位方式,但只要核心的功能需求相同,通过可选择定位模块设计技术,仍然可以适应下一代列控系统总体框架。另外,也可以通过选择不同车-地通信模块设计技术,选择不同的车-地通信方式,满足适应列控系统总体框架的需求。与此同时,应根据共同适用的功能需求规范,整合原有车站联锁 (CBI)、列控中心 (TCC)、无线闭塞中心 (RBC) 等子系统功能,设计适用范围广的系统结构、基本相同的系统逻辑模型及可选择的标准化接口模块,以适应不同轨道交通的特殊需求。
2.4.2通用的车载设备
目前,由于列控设备不能兼容,CTCS-3 级线路必须安装 CTCS-2 级地面设备,如轨道电路、应答器、列控中心等,CTCS-3 级列车也必须装备 CTCS-2 级车载列控设备才能实现 CTCS-3 级与CTCS-2 级的转线运行,CTCS-2 级列车也必须装备 LKJ 设备才能实现 CTCS-2 级向既有线的转线运行。但是,由于 CTCS-3 级线路地面不安装信号机,既有线列车甚至不能从既有线向 CTCS-3 级转线运行;铁路干线与城市轨道交通完全不能实现相互转线运行。因此,我国 NGTCS 应积极开发灵活、标准化的列控车载设备,支持列车在不同CTCS 级别的高速铁路 (客运专线)、既有线、城际及城市轨道交通线路上进行转线运行,实现各种铁路干线及城轨之间的互联互通转线功能;根据共同适用的功能需求规范,设计适用范围广的车载安全计算机系统,具备适应不同 CTCS 级别的高速铁路 (客运专线)、既有线、城际及城市轨道交通CBTC 的核心列车控制功能;能够根据地面列控系统变化,自动识别、切换列控系统模式;能够根据列控系统轨旁设备的变化,在可选择的标准化接口模块中进行自动选择,以适应不同轨旁设备。例如,既有线在 CTCS-2 级区段开启轨道电路接收模块,在 CTCS-3 级区段开启 GSM-R 双向通信模块,在卫星定位区段开启卫星定位接收模块。
2.4.3移动闭塞
我国铁路干线一般采用以固定闭塞为基础的闭塞方式,列控系统无法知道列车在分区内的具体位置,因而列车制动的起点和终点总在某一分区的边界。CTCS-2、CTCS-3 采用的准移动闭塞在控制列车的安全间隔上对固定闭塞进行了优化,后续列车制动的起点可以延伸至保证其安全制动的地点,但目标制动点仍然应在先行列车占用分区的外方,并没有完全突破轨道电路的限制。
目前城市轨道交通 CBTC 基本采用了移动闭塞,移动闭塞目标点示意图如图4 所示,移动闭塞的线路取消了物理层次上的分区划分,通过车载设备和轨旁设备不间断的双向通信,控制中心可以根据列车实时的速度和位置动态计算列车的最大制动距离。列车的长度加上这一最大制动距离并在列车后方加上一定的防护距离,组成了一个与列车同步移动的虚拟分区。由于保证了列车前后的安全距离,2 个相邻的列车可以保证安全的间隔,以较高的速度和较小的间隔运行,从而提高运营效率。

图4 移动闭塞目标点示意图
因此,我国铁路干线 NGTCS 应当突破移动闭塞核心技术,在铁路干线实现移动闭塞。尽管移动闭塞技术在 CBTC 取得许多成功经验,但移动闭塞技术直接应用于铁路干线还存在以下难题。
(1)我国铁路干线是以轨道电路为基础的固定分区闭塞方式,要实现移动闭塞,需要取消以轨道电路为基础的固定分区,实现以通信为基础无固定分区的闭塞方式。
(2)我国高速铁路最高运行速度可以达到 350 km/h,城市轨道列车运行速度一般不超过 120 km/h,高速度对移动闭塞系统提出更高的时间要求,列车位置、速度测量精度要求及控制精度要求。
(3)我国铁路干线列车包括动车组列车、普通旅客列车和货物列车,列车载重、长度、制动、牵引特性差别较大,针对不同列车特性会产生不同的制动距离、安全间隔需求,控制策略也会产生较大变化。
(4)我国铁路干线线路一般比较复杂,坡道、弯道、桥梁、隧道不仅影响目标距离曲线计算,许多地方甚至限制列车运行速度,如货物列车在长大坡道、桥梁不能停车,分相区内不能停车等。
(5)我国铁路干线车站作业复杂,既可以进行列车接车、发车、通过作业,也可以进行各种调车作业,因而移动闭塞在车站各种场景的适应性还需要进行深入研究。
2.4.4列车自动驾驶
目前铁路干线列控系统主要具备超速防护功能,但还不能实现列车自动驾驶、优化驾驶等功能,主要应解决以下问题。
(1)在 CTCS-3 级列控车载设备 (含 CTCS-2级功能) 主要工作模式基础上,重新定义车载设备工作模式,以便于适应列车自动驾驶。
(2)研究铁路干线列车能耗优化策略及模型,实现列车优化运行;研究不同车-地通信方式下,列车自动驾驶运行计划信息的获取方式与控制方法等。
3 结束语
发展 NGTCS 已经成为各国的共识,也是未来铁路信号必然的发展趋势。我国 NGTCS 不只是追求高的技术指标,更要利用新技术优化、简化系统结构,降低建造成本和运维成本,提高系统可靠性和安全性;采用新技术统一规划、设计以适用于不同轨道交通,综合化轨道交通更好地实现,为方便旅客出行提供便捷的服务。因此,我国 NGTCS 还应充分考虑国际标准的适应性,利用新技术进一步提高铁路运输自动化水平和效率,降低铁路能源消耗,实现高效绿色运输,为实现高速铁路“走出去”发展战略提供技术支撑。
[1] 宁 滨. 高速列车运行控制系统[M]. 北京:科学出版社,2012:1-30. NING Bin. High-speed Train Control System[M]. Beijing:Science Publishing House, 2012:1-30.
[2] 何华武. 中国高速铁路创新与发展[J]. 中国铁路,2010(12):5-8. HE Hua-wu. Innovation and Development of Chinese Highspeed Railway[J]. Chinese Railways, 2010(12):5-8.
[3] 何华武. 建立中国高速铁路技术体系的研究[J]. 铁道运输与经济,2006,28(12):1-10. HE Hua-wu. Research on Establishing Technical System of China High-speed Railways[J]. Railway Transport and Economy, 2006,28(12):1-10.
[4] 程剑锋,田 青,赵显琼,等. 下一代列控系统技术方案探讨[J]. 中国铁路,2014(12):32-35. CHENG Jian-feng,TIAN Qing, ZHAO Xian-qiong,et al. Discussion on Technical Scheme of Next Generation Train Control System[J]. Chinese Railways, 2014(12):32-35.
[5] 王 剑,张福隆,蔡伯根,等. ERTMS-Regional 发展综述[J]. 铁道学报,2012(1):60-64. WANG Jian, ZHANG Fu-long, CAI BO-gen,et al. Review on Development of ERTMS-Regional[J]. Journal of the China Railway Society, 2012(1):60-64.
[6] 赵 磊,何春明. 美国 PTC 系统和欧洲 ERTMS 的差异分析[J]. 铁路通信信号,2011(11):56-59. ZHAO Lei, HE Chun-ming. Difference Analysis between American PTC System and European ERTMS[J]. Railway Signalling& Communication, 2011(11):56-59.
[7] Lindsey R. Positive Train Control in North America[J]. Vehicular Technology Magazine,2009,4 (4) :22-26.
[8] 陈荣武,诸昌钤,刘 莉. CBTC 系统列车追踪间隔计算及优化[J]. 西南交通大学学报,2011,46(4):579-585. CHEN Rong-wu, ZHU Chang-qian, LIU Li. Calculation and Optimization of Train Headway in CBTC System[J]. Journal of Southwest Jiaotong University, 2011, 46(4):579-585.
[9] 范丽君. ETCS 技术在列控系统中应用的探讨[J]. 中国铁道科学,2003,24(3):98-103. FAN Li-jun. Application of ERTMS/ETCS in Train Control System[J]. China Railway Science,2003,24(3):98-103.
责任编辑:赵 娟
Outlook and Thoughts on Next Generation Train Control System in China
In order to further simplify and optimize the structure of train control system, increase automation level of the system and interoperability between lines of different grade and shorten the tracking interval of trains, through analyzing present situation of next generation train control system in Europe and problems existing in train control system in China, this paper puts forward the development goal of next generation train control system and the establishment of the system model. Based on the above-mentioned, the paper studies some key technologies of the train control system, and takes full consideration on adaptability of international standards, and puts forward that the automation level and efficiency of railway transportation should be further increased by using new technologies, so as to provide technical support of realizing “go global” development strategy of high-speed railway.
High-speed Railway; Next Generation Train Control System; System Model; Key Technology
1003-1421(2016)06-0023-06
U283
A
10.16668/j.cnki.issn.1003-1421.2016.06.05
2016-03-07
中央高校基本科研业务费专项资金资助(2682014BR059);中国铁路总公司科技研究开发计划重大课题(2014X008-A)
