Mecanum轮全向移动平台运动精度的仿真分析
2016-12-07陆军金毅
陆军, 金毅
(1.上海开通数控有限公司,上海 200233; 2.上海大学 机电工程与自动化学院,上海 200072)
Mecanum轮全向移动平台运动精度的仿真分析
陆军1, 金毅2
(1.上海开通数控有限公司,上海 200233; 2.上海大学 机电工程与自动化学院,上海 200072)
首先对Mecanum轮的运动原理进行说明,然后对4 Mecanum轮的全向移动平台进行运动受力分析,并基于UG对该全向移动平台进行动力学仿真,在改变重心、单轮悬空和水平力作用的情况下,分析位移和运动的准确性变化。然后,对装配有悬挂系统且单轮悬空的情况进行运动分析,说明悬挂系统对4 Mecanum轮全向移动平台的重要性。最后对辊子在直行、横移、旋转运动的情况下的受力进行比较,为辊子材料的选择提供借鉴。
Mecanum轮;UG;仿真;悬挂系统;辊子
0 引 言
Mecanum轮(又称Swedish轮)是瑞士工程师BengtIron提出的特殊轮系,其轮毂圆周边缘装配有与中心轴成一定角度并且能绕其自身轴线进行旋转的辊子。装配有一定数量Mecanum轮并且合理装配的移动平台具有平面内的三个自由度,即能进行前后、左右和原地旋转运动,可以在平面内向任意方向运动。借助于横向移动和原地回旋的特性,全方位运动平台可方便的穿梭于狭窄拥挤空间中,灵活完成各种任务,相比传统移动平台具有明显优势[1-5],装配四个Mecanum轮的车辆最为常见。由于装配Mecanum轮的车辆完全依靠轮子的自转与地面的摩擦产生的合力来改变车辆的转向,所以这种车辆无需转向系统,且比一般车辆的转向半径小的多。但也带来轮子受地面摩擦变化影响较大的问题,因此,需要对其运动和受力进行分析。
本文基于UG对Mecanum全向移动平台的运动进行仿真分析,查看其在单轮悬空、重心位置改变的情况下其运动精度的变化;对装有悬挂系统的Mecanum轮全向移动平台进行运动分析,查看其标定点位移动变化,说明悬挂系统对Mecanum轮全向移动平台对解决单轮悬空保证运动准确性的重要性;在有无悬挂系统两种情况下,分别施加水平横向力,查看其所受横向力对运动精度的影响。最后,比较Mecanum全向移动平台在直行、横行、原地转动时辊子受力,为其材料选择提供借鉴。
1 Mecanum轮特点
Mecanum轮圆周上安装有斜向布置的辊子,辊子可绕其轴线自由转动,辊子与地面的滚动摩擦力为轮子提供动力,驱动轮子移动。但Mecanum轮的辊子轴线与轮子轴线有一偏置角α(α一般为45°),滚动时产生侧向运动。为了保证Mecanum轮的运行平稳减少振动和敲地现象,辊子的包络线在Mecanum轮横截面上必须形成完整的包络圆,并追求较大的重合量。
2 Mecanum轮全方位运动分析
Mecanum轮与斜齿轮类似,有左旋,右旋之分,通过研究斜齿轮的切向力、法向力、轴向力和满足逆运动学雅可比矩阵的秩 rank (R) =3(也就是列满秩),可以知道轮子的装配方式为左右旋向相反,前后旋向相反。根据Mecanum轮的受力分析结果对装配四个Mecanum轮的全向移动平台进行受力分析。

图1 Mecanum运动平台及轮子示意图
如图1所示,对Mecanum全方位移动平台进行动力学分析[6-7],以全向移动平台的中点O为原点在车架上建立坐标系XOY,再以各轮的中心为原点建立各轮的坐标系X1O1Y1,X2O2Y2,X3O3Y3,X4O4Y4。设四个Mecanum轮的角速度为ω1,ω2,ω3,ω4;辊子速度V1,V2,V3,V4;车体速度Vx,Vy,ωO。进行运动学分析得:
(1)
结合Mecanum轮的受力分析可知其运动精度影响因素。第一,重心位置变化对运动影响。第二,如果出现单轮悬空时,运动精度的变化。第三,采用悬挂系统对运动精度的作用。第四,水平作用力对全方位移动平台的影响。
3 UG仿真分析
以上得出的结论是在假定重心正好位于车辆的几何中心时出的结论,现在通过UG运动仿真模块对所要研究的问题进行运动仿真分析[8-10]。
3.1 创建模型
用UG构造Mecanum全方位移动平台,车体X方向长600 mm,Y方向长400 mm,小车模型左右、前后对称,重心在几何中心,以中心O建立坐标系XOY。为保证各轮与地板的接触面积相同,进而保证小车启动时的所受地板摩擦力相同和仿真结果的准确性,Mecanum轮装配时要保证端面的矩形凹槽平行且左右对称,四个Mecanum轮与车体的连接为转动副,且配置四个驱动转速为恒定值12°/s,辊子与支撑板采用36个旋转副(四个轮子共36个辊子),辊子与地板采用3D接触,且设定为小平面接触,刚度参数100 000 N/mm,刚度指数2,静摩因数0.3,动摩擦因数0.2。
3.2 直行工况
3.2.1 改变重心
设定四个Mecanum轮与车体的4个旋转副的转向相同。在点(-90,90)处分别施加垂直于车体向下的力F=1 000 N和50 000 N使重心位置改变,设置坐标原点O点为标记点,以便于对运动情况进行分析,输出O点重心改变前后的位移曲线。如图2所示。

图2 位移-时间图(直行重心改变)
试验结果显示车子直行时,改变重心前后的位移曲线没有变化,这表明直行工况时,重心偏离车体几何中心的情况下不影响其运动精度。
3.2.2 单轮悬空
在图2模型中,去除轮2及其相关约束,其他条件不变,同样比较在点(-90,90)处施加向下力F=1 000 N和50 000 N,比较标记点的位移变化。其位移图与图2一致,这说明直行工况下,单轮悬空和重心改变都不会影响Mecanum全方位移动平台的运动精度。
由公式(1)(2)可知,直行的条件为ω1=ω2=ω3=ω4且辊子不发生自转。此时,Mecanum轮与普通车轮近似,当单个车轮悬空和重心改变时,不影响其运动轨迹。
3.3 横行工况
在图2模型中,改变四个Mecanum轮与车体的4个旋转副的转向使ω1=-ω2=-ω3=ω4,比较其于去除轮2及其相关约束并在点(-90,90)处施加向下力F=5 000 N和不施加力时的位移曲线图可知,行时,Mecanum轮全方位移动平台在单轮悬空、重心偏移和双重作用时,其运动轨迹不变。
3.4 旋转工况
设定四个Mecanum轮与车体的4个旋转副的驱动为ω1=-ω2=ω3=-ω4。通过坐标点(90,-90)施加垂直于车体的力F=1 000 N使重心位置改变,设置O点为标记点,输出O点重心改变前后的位移图如图3所示。

图3 位移时-时间图
比较结果可以发现,悬空和改变重心时其运动轨迹变化很小。
3.5 悬挂系统对运动影响
以车体中心点O为坐标原点,建立坐标系XOY。Mecanum轮与车架之间通过螺旋压缩弹簧连接,弹簧刚度系数为35 N/mm,其中轮2脱离地板5 mm。因为旋转运动最复杂也最有代表性,所以仅对旋转情况进行运动分析。现在(-90, 90)点施加矢量力F=2 000 N(即重心改变和单轮悬空综合作用和保证四个弹簧都处于压缩状态),得标记点O的位移图为图4所示。
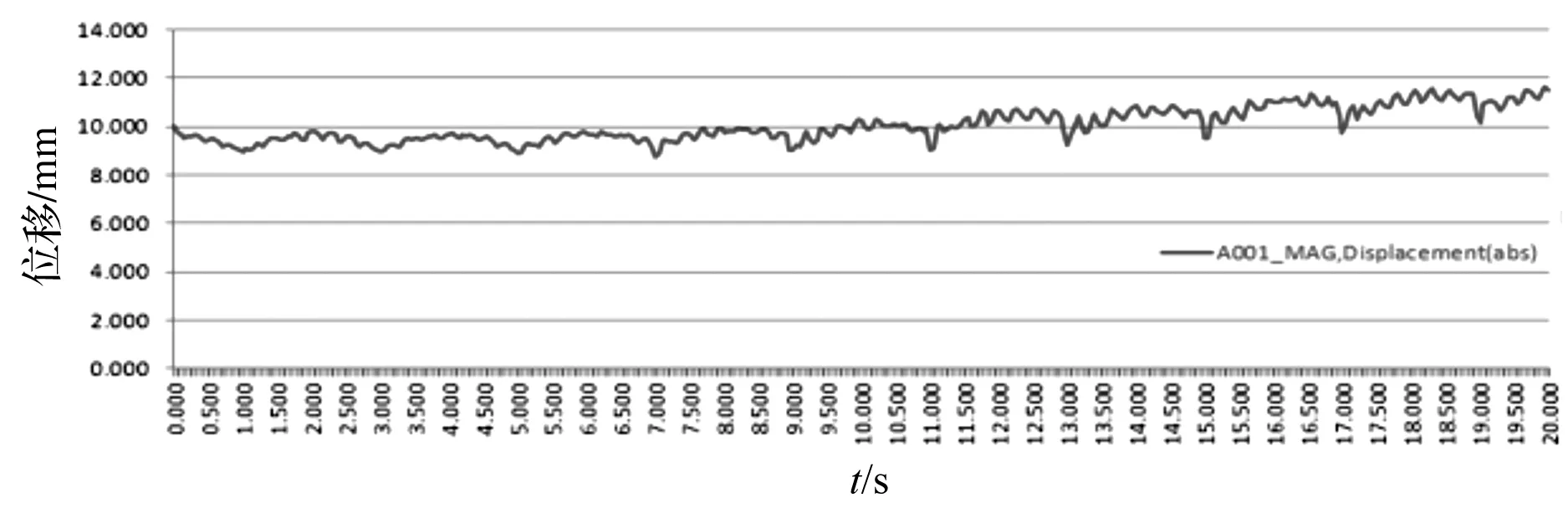
图4 旋转时位移-时间图(有悬架)
由图4可知,在运动启动阶段由于矢量力要消除轮2的离地间隙和F作用下弹簧压缩,造成O点偏移了约10 mm,从整个旋转过程可以看出O点的偏移量始终保持在4 mm以内,相对于未加悬挂系统时的图3来说,其位移偏差进一步缩小。从这个方面可以知道,悬挂系统可以有效弥补由于制造精度和装配误差造成的误差,并且仿真显示在四个轮子中任意两个打滑则其运动将不可控,所以对于追求高精度运动的Mecanum轮全向移动装置设计合适的悬挂系统非常必要。
3.5.1 水平作用力对运动影响
装置如果要求在横向工位具有加工能力,那么该装置要求在直行情况下能够承受足够的水平横向力作用,并能够保证其运动轨迹不变。
3.5.2 Mecanum轮受力分析
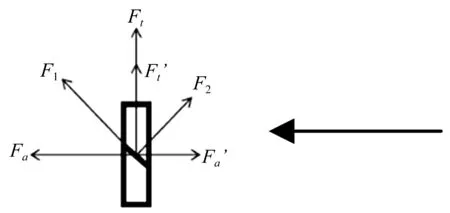
图5 Mecanum轮受力图
如图5所示,轮子以ω角速度转动时辊子与地面产生的延辊子轴线方向和辊子轴线法向方向的轴向摩擦力F1和法向摩擦力F2,F1可以分解为轴向力Fa和径向力Ft,这使Mecanum轮拥有轴向和径向运动的可能,F2使辊子绕轴线自由转动。
对其单轮受摩擦力分析,设辊子与地板静摩擦因数为f1,动摩擦因数为f2,滚动摩擦因数为f3。当全向移动装置受到横向力作用时,分析车轮的摩擦力可知,辊子受静摩擦(或滑动摩擦)和滚动摩擦的作用,且车轮滚动时,F1为轮子所受的静摩擦力(打滑时为滑动摩擦),F2为轮子所受的滚动摩擦力,可分解为F'a和F't,Wi为单个车轮所受的支撑力,有汽车理论知识可知,滚动摩擦因数是由试验所得,受多方面影响:①路面种类 ②车速 ③轮子的构造、材料等。本文中所选材料均为钢材料构造。
F1=Wi·f1
(2)
F2=Wi·f3
(3)
则单个车轮运动时所能承受的最大横向力Fi'为:
Fi'=Fa-Fa'
(4)
其中
Fa=cosα·F1=cosα·Wi·f1
(5)
Fa'=sinα·F2=sinα·Wi·f3
(6)
所以:
Fi'=cosα·Wi·f1-sinα·Wi·f3=Wi(cosαf1-sinαf3)
(7)
同理其所能承受的最大径向力Fi″为:Fi″=Wi(sinαf1+cosαf3)
设四个Mecanum轮的驱动功率为P1、P2、P3、P4,角速度为ω1、ω2、ω3、ω4,Mecanum轮半径为r,则四个Mecanum轮的驱动力为:
由于模型中设置的驱动功率均相同,所以四个Mecanum轮所受的地面作用力Ffi满足:
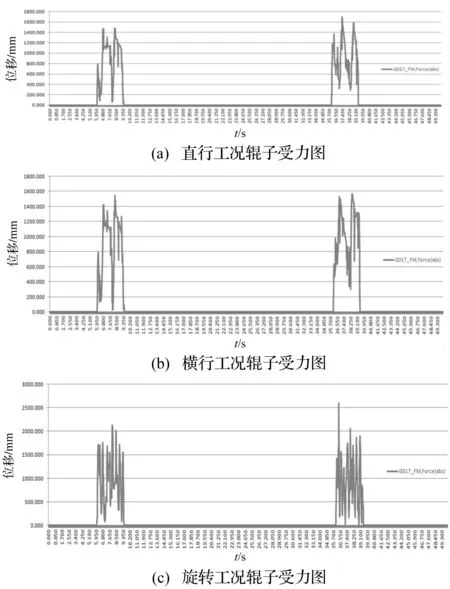
当Ffi 3.6 分析辊子在不同运动形式下的受力 3.6.1 直线行驶情况下 使用图1建立的仿真模型,设定四个驱动旋转副转速ω1=ω2=ω3=ω4=12°/s,设定运动时间50 s,步数2 000。解算后对一辊子与地板的3D接触的力进行作图,得力曲线图为图6(a)。图6(a)显示辊子近似受周期作用力,受力时会有最大约1 700 N的冲击载荷。 3.6.2 横向运动 将图1仿真模型中四个驱动旋转副转速设定为ω1=-ω2=-ω3=ω4=12°/s,其他设置保持不变,得一辊子与地板3D接触的力曲线图为图6(b)。图6(b)显示辊子近似受周期作用力,受力时会有最大值接近1 600 N的冲击载荷。 3.6.3 旋转运动 将12仿真模型中四个驱动旋转副转速设定为ω1=-ω2=ω3=-ω4=12°/s,其他设置保持不变,得一辊子与地板3D接触的力曲线图为图6(c)。图6(c)显示辊子近似受周期作用力,辊子受力时会有最大值接近2 700 N的冲击载荷。 图6 地板3D接触的力曲线图 (1)设计必要的悬挂系统对整个装置至关重要。 (2)重心改变虽然对运动轨迹影响较小,但为了追求高精度,力求重心靠近其几何中心。 (3)辊子受到较大的冲击载荷,所以设计师要注意棍子材料的选择,并且应该以旋转运动状态下的受力为设计参考。 [1] 闫国荣,张海兵. 一种新型轮式全方位移动机构[J].哈尔滨工业大学学报,2001,33(6):854-857. [2] 李磊,叶涛,谭民,等. 移动机器人技术研究现状与未来[J]. 机器人,2003,24(5) : 475-480. [3] 徐国华,谭民. 移动机器人的发展现状及其趋势[J]. 机器人技术与应用,2001,14(3) : 1-3. [4] 赵冬斌,易建强. 全方位移动机器人导论[M]. 北京: 科学出版社,2010. [5] 张毅. 移动机器人技术及其应用[M]. 北京: 电子工业出版社,2007. [6] 王兴松. Mecanum 轮全方位移动机器人技术及其应用[J].机械制造与自动化,2014,43(3):1-6. [7] 吕伟文. 全方位轮移动机构的结构设计[J]. 机械与电子,2006,24(12):63-65. [8] 周京京,郭爱东,李春卉,等.基于CosmosMotion 的Mecanum 轮运动仿真[J].起重运输机械,2011,51(11):39-42. [9] 刘中新,张春亮,王占富. 全方位移动平台运动分析与仿真[J].机械与电子,2013,31(8):16-19. [10] 刘洲, 吴洪涛. Mecanum 四轮全方位移动机构运动分析与仿真[J].现代设计与先进制造技术,2011,40(5):43-46. Simulation Analysis of the Motion Accuracy of Mecanum Wheel Omnidirectional Mobile Platform Lu Jun1, Jin Yi2 (1. Shanghai Capital Numerical Control Co., Ltd., Shanghai 200233, China,2.Institute of Mechatronic and Automation Engineering, Shanghai University, Shanghai 200072, China) First, it presents an explanation on the motion principle of Mecanum wheel is described, and then conducts an analyses on the motion stress applied to the omnidirectional mobile platform with 4 Mecanum wheels, a dynamics simulation for the omnidirectional mobile platform is performed based on UG. To analyze the changed displacement and the accuracy of the movement as the gravity center shifts or a single wheel is dangling or the horizontal force is applied, Then, a motion analysis is performed for the case where a single wheel equipped with suspension system is dangling in order to prove the importance of suspension system to the omnidirectional mobile platform with 4 Mecanum wheels. Finally, the applied stress is compared when the roller is under straight movement, lateral movement and rotational movement in an attempt to provide a reference for selecting the roller material. Mecanum wheel;UG;simulation;suspension system;roller 10.3969/j.issn.1000-3886.2016.04.013 TP39 A 1000-3886(2016)04-0039-03 陆军(1970-),男,上海人 ,专业:机电一体化。 定稿日期: 2016-03-204 结束语