异步电机矢量控制系统的设计与实现
2016-12-07朱里红旷江明王洋杨明
朱里红, 旷江明, 王洋, 杨明
(成都理工大学 工程技术学院,四川 乐山 614000)
异步电机矢量控制系统的设计与实现
朱里红, 旷江明, 王洋, 杨明
(成都理工大学 工程技术学院,四川 乐山 614000)
以矢量控制思想为基础, 以异步电机磁通和转矩独立控制为目标,以DSP为控制核心,在磁链开环作用下,建立转矩电流、励磁电流分量为控制内环,以转速为控制外环的双闭环异步电机矢量控制系统,实现异步电机无级调速。经实验证明,该系统跟随性、动态性及调速性有较大提高。
异步电机;矢量控制;DSP;双闭环调速系统;动态性
0 引 言
交流异步电机电磁转矩Te=KmΦmI2cosφ2,电磁转矩与磁通Φm、转子电流I2、转子功率因数cosφ2有关,且磁通由定、转子磁势共同产生,另外磁通、转子电流和转子功率因数都与转差率s存在函数关系。要精确控制异步电机的转速和转角,必须准确控制电磁转矩Te,然而各变量间存在强耦合、不独立关系,因此,要在动态中准确地控制异步电机的转矩比较困难[1]。
1971年德国学者Blaschke提出矢量变换思想,使得交流异步电机能像直流电动机一样准确、简单地控制[2],由于矢量变换过程存在矩阵可逆、浮点等运算,所以选用TI公司的TMS320x数字信号处理器作为系统控制核心,该处理器具有运算速度快、精度高、性能稳定、成本低的特点,为矢量控制的矢量变换、正余弦转换提供高精度,快速计算。
1 SVPWM原理
SVPWM原理是把PWM 逆变器与电机看成一体,作为执行机构如图1所示,着眼于如何产生恒定的圆形磁场[3]。由于交流电动机需要输入三相正弦电流的最终目的是在电动机控制下形成圆形旋转磁场,从而产生恒定的电磁转矩[4]。

图1 三相逆变器主电路
逆变器三组开关管不同的开关状态组合可以使A,B,C 三点的电压出现八种状态,我们把上臂导通,用数字“1”表示,下臂导通用数字“0”表示,则八种状态表示为000、001、010、011、100、101、110、111 这八种状态在电机三相定子绕组坐标上对应的电压、电流、磁链空间矢量。其中空间电压矢量合成方程式可以表达为:

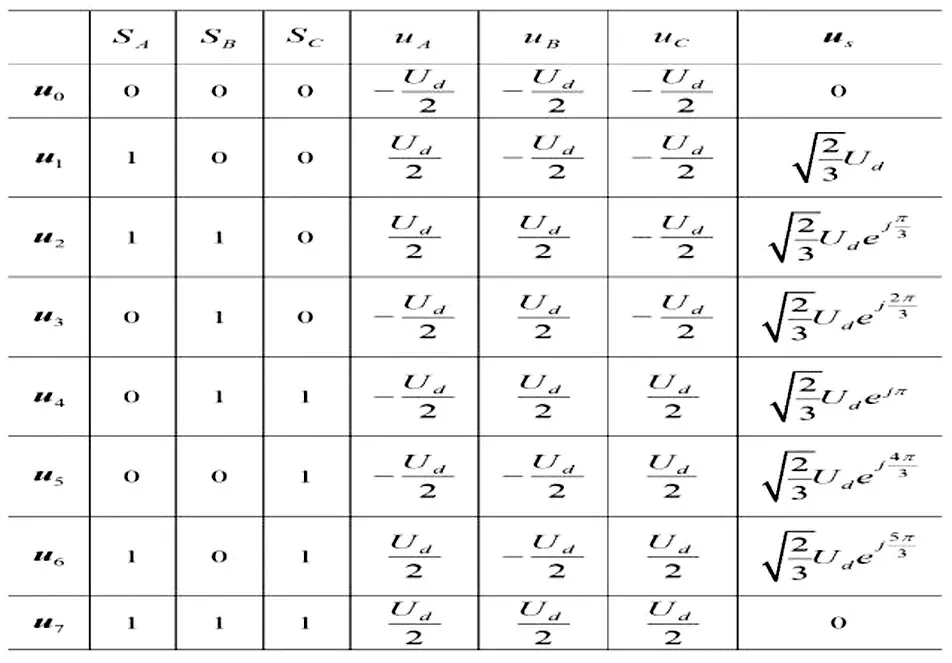
表1 逆变器输出的八种基本空间矢量
为了得到平滑的圆形磁场,必须合成任意角度的矢量,因此选择六个有效矢量中任意相邻矢量做线性时间组合,在Oαβ坐标系上可分解成uscosθ和ussinθ,在相邻有效矢量的作用t1和t2时间下,通过DSP产生任意角矢量,其矢量合成可以表示为:
2 系统设计
2.1 系统结构设计
系统结构如图2所示,由给定模块、控制模块、坐标转换模块及逆变器组成[7]。
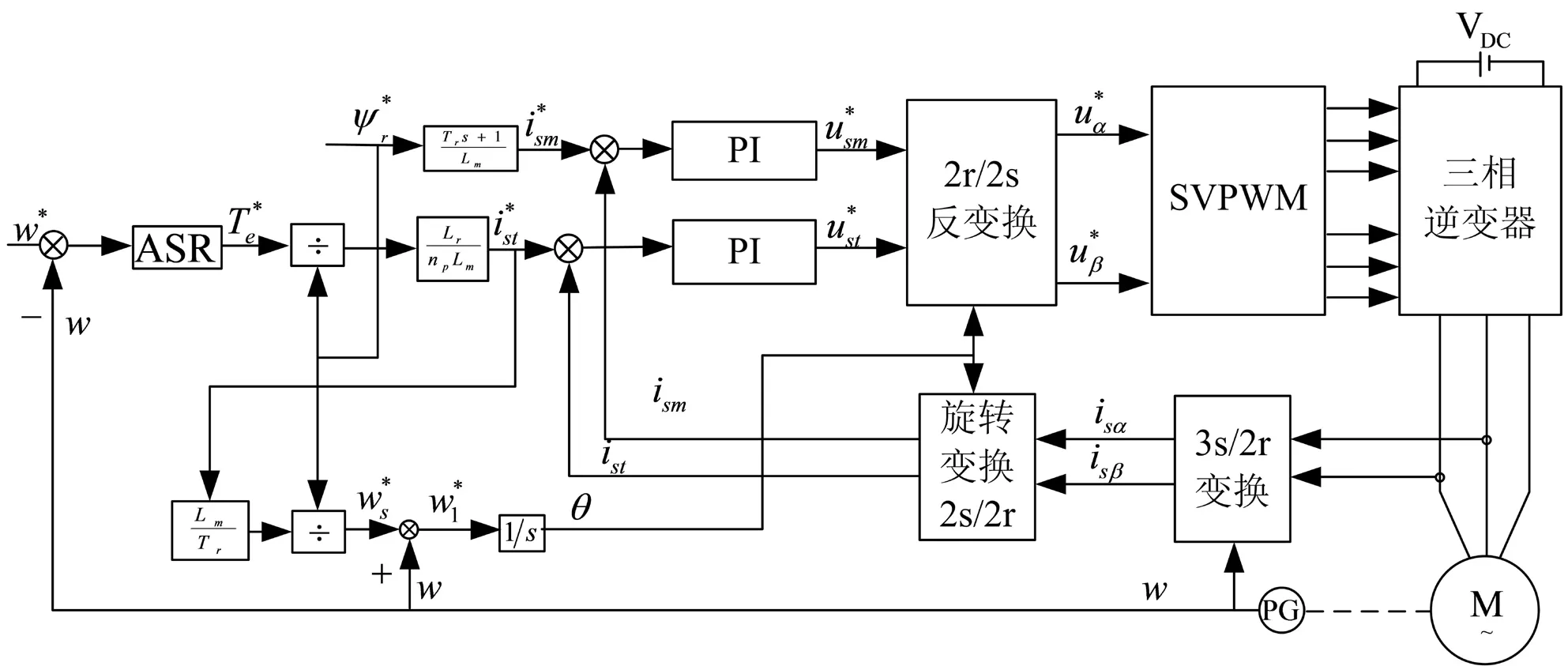
图2 双闭环控制系统仿真模型
2.2 SVPWM模块设计

程序设计步骤如下:
(1) 确定扇区。当us以oαβ坐标系上的分量形式usα和usβ给出时,可通过B0、B1和B2来确定。
在用下式计算P值:
P=4sgn(B2)+2sgn(B1)+sgn(B0)
式中sgn(x)是符号函数,设x>0,sgn(x)=1;x<0,sgn(x)=-1。通过计算P值来确定us矢量位于那个扇区(如表2所示)。

表2 P值与扇区号对应关系
(2) 确定两相邻有效矢量所占的时间t1和t2,如表3所示。

表3 扇区号与有效作用时间对应关系

(3) 确定在不同扇区开关a、b、c作用时间Ta、Tb和Tc,如表4所示。

表4 开关a、b、c在不同扇区的作用时间
其中Taon=(Tpwm-t1-t2)/2,Tbon=Taon+t1,Tcon=Tbon+t2。
2.3 系统仿真
异步电机矢量控制系统MATLAB仿真模型如图3所示,从仿真结果图(如图4所示)可以看出系统在起动过程中电流上升阶段很短,速度控制器很快进入饱和状态,当速度达到额定速度时及时退饱和,实现了速度控制器的时间最优控制,在0.6 s时,外加负载,转矩立即响应增强了系统的抗干扰能力,保证了异步电机稳定调速。
3 硬件设计
该控制系统硬件电路主要有控制单元、功率单元以及检测、显示单元构成,其中功率单元完成主电路整流、滤波和逆变电路实现电机供电能量的转换功能。控制单元完成整个系统控制任务,采用DSP 处理器TMS320F2812芯片,该处理器具有高可靠性和快运算能力。
功率板是实现交-直-交电压变换,提供电路及电机提供电能,在整流和逆变过程中,会产生直流脉动或交流三角波,因此,在设计过程中必须适当的滤波和保护措施。
PWM控制信号为六路,为保证驱动板和控制板的安全采用高速光耦实现高、低压隔离如图5所示,且在上、下桥臂转换间采用与非门互锁,防止上、下桥臂直通,过流硬件保护如图6所示保护电路分别IGBT引脚温度和电流,防止堵转、过载情况的发生,为系统和电路提供保护如图7所示。
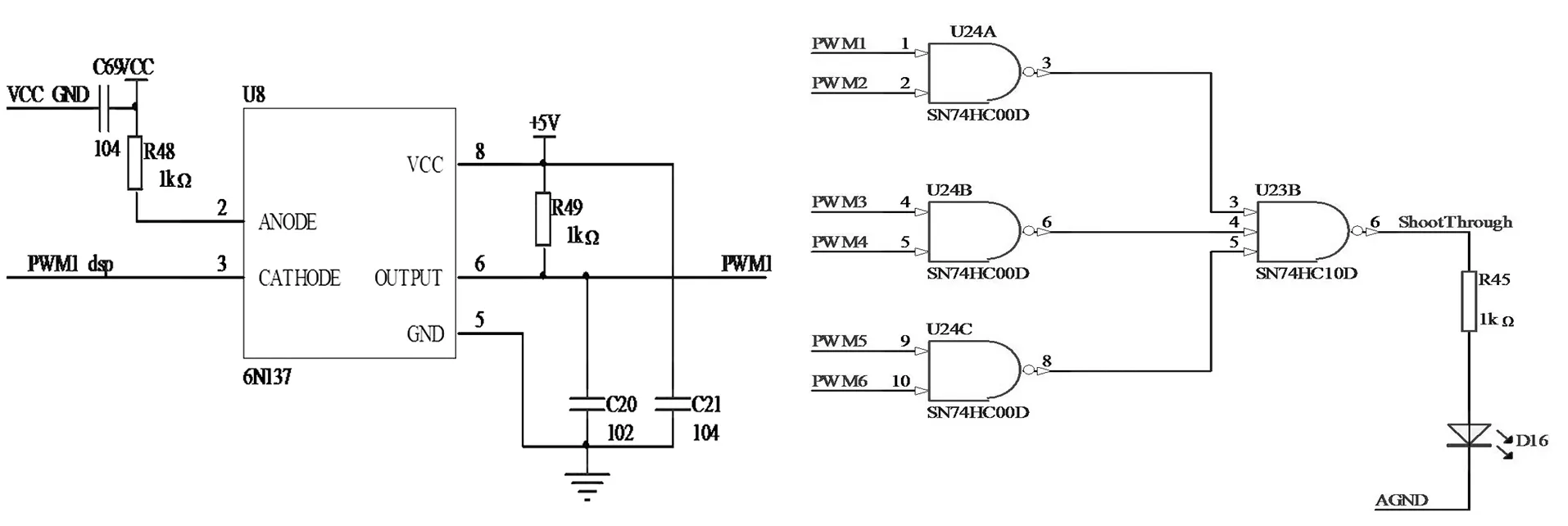
图5 光耦隔离电路 图6 过流硬件保护电路
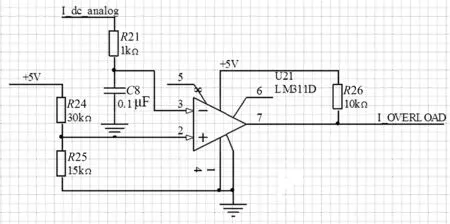
图7 防堵转电路
4 程序设计
利用TMS320F2812处理器IQmathLib库函数负责A/D转换、PWM中断、速度预估、坐标变换及SVPWM的输出,既能保证运算的速度,也能确保计算精度。
控制程序由两部分构成,主程序和中断程序。在主函数中完成硬件和变量的初始化,配置各控制寄存器的初值、各变量的初值,设置串口通讯协议等,中断程序使系统核心部分,在while函数中为空等待,等待中断的服务子程序包括串口中断、PWM中断、故障中断、外部响应中断等。期中外部响应中断实现人机交互,PWM中断实现速度预估、坐标变换及产生SVPWM时序控制[8]。
其控制流程图如图8和图9所示。
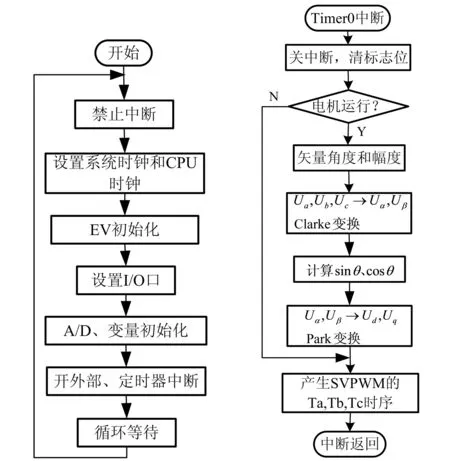
图8 主程序流程图 图9 定时器0产生SVPWM中断
5 结束语
空间矢量控制方法开发的驱动装置经仿真和实际测试,达到预期的效果。利用DSP快速响应的优势,电机转速调节的平滑性得到改善,消除了力矩脉冲的影响。
[1] 曾晓斌,李全.基于MRAS的无速度传感器矢量变换控制系统的设计与仿真[J].五邑大学学报:自然科学版, 2013,20(4):57-62.
[2] 李实求,郝帅,马旭等.异步电动机三闭环模糊PI矢量控制方法研究[J]. 电力电子技术,2011,45(5):60-61.
[3] 陈政石,金来专.一种开放型低成本交流变频调速实验系统开发[C].中国电机工程学会年会,2009.
[4] 喻涵,信钊炜 ,陈苗.永磁同步电机矢量控制的两种控制策略的研究[J].工业控制计算机, 2015,28(2):129-130,132.
[5] 姜艳姝,徐殿国,陈希有,等.一种新颖的用于消除PWM逆变器输出共模电压的有源滤波器[J]. 中国电机工程学报, 2002,39(10):125-129.
[6] 陈召磊,王真,王雷. 基于空间矢量的矿井提升机容错逆变器控制策略[J]. 煤矿机械, 2014,35(9):225-228.
[7] 崔培良,赵克友.基于MATLAB/Simulink S-Function感应电机矢量控制仿真建模[J]. 系统仿真学报, 2005,17(12):86-90.
[8] 张邦成 陈兆峰,杨晓红,等. 基于数字信号处理器的变频调速系统设计[J]. 电机与控制应用, 2006,48(1):57-60.
Design and Implementation of an Asynchronous Motor Vector Control System
Zhu Lihong, Kuang Jiangming, Wang Yang, Yang Ming
(The Engineering & Technical College, Chengdu University of Technology, Leshan Sichuan 614000, China)
Based on the vector control idea, aiming at independent control over flux and torque of the asynchronous motor, and with DSP as control core, we use the open loop of flux linkage to build up a dual closed-loop asynchronous motor vector control system which has torque current and excitation current component as its inner control loop and speed as its outer control loop, thus realizing steeples speed control of the asynchronous motor. Experiments show that the system’s following performance, dynamics and speed control are improved quite a lot.
asynchronous motor; vector control; DSP; dual closed-loop speed control systems; dynamics
10.3969/j.issn.1000-3886.2016.04.004
TP277
A
1000-3886(2016)04-0011-03
四川省教育厅科研项目资助(14ZB0356);乐山市科技局科研项目资助(14GZD047); 成都理工大学工程技术学院青年科学基金项目资助(C122014006)
朱里红 (1979-),男,四川仁寿人,硕士,讲师,主要从事冶金节能技术和智能控制技术的研究。
定稿日期: 2015-12-29
