永磁偏置径向磁轴承拓扑研究及其进展
2016-12-06赵旭升
赵旭升
(南京科技职业学院,南京 210048)
永磁偏置径向磁轴承拓扑研究及其进展
赵旭升
(南京科技职业学院,南京 210048)
永磁偏置径向磁轴承能够实现转子的径向两自由度悬浮,是应用最为广泛的永磁偏置磁轴承。对永磁偏置径向磁轴承的研究现状进行了详细阐述,将径向磁轴承分为同极性和异极性两类分别研究,分析其结构及工作原理,进行类比,并指出其应用场合。对其拓扑的未来发展进行了展望,结合应用场合提出了多种结构形式的永磁偏置径向磁轴承,低功耗、结构简单、加工安装方便、控制性能优越的磁轴承仍将是重点研究领域。
永磁偏置径向磁轴承;拓扑结构;工作原理;发展
0 引 言
磁轴承由于定转子之间无机械摩擦,机械损耗小,在高速场合有着较为广泛的用途,并在高温、高压等多种严苛环境中能得以应用[1]。随着稀土永磁材料的广泛应用,利用永磁体提供偏置磁通的永磁偏置型磁轴承成为磁轴承研究的热点[2-3],为充分利用永磁体的磁能、降低励磁功耗,国内外研究人员提出了众多的拓扑结构,径向两自由度磁轴承既可以单独应用,也与轴向单自由度、轴向径向三自由度构成五自由度磁悬浮系统,应用最为广泛,拓扑形式众多[4-32],在此对其进行研究。永磁偏置径向磁轴承(以下简称PRMB)一般分为同极性和异极性两类,本文对这两类磁轴承的拓扑分别进行研究,并对PRMB的拓扑结构未来发展进行了展望。
1 同极性PRMB
同极性PRMB是指偏置磁通在定子磁极上产生的极性相同,涡流和磁滞损耗相对较小,在动量飞轮、飞轮储能等高速场合已有较为广泛的应用。但由于其偏置磁通和控制磁通的流通路径不在一个平面上,轴向长度较长,漏磁相对较大,电磁场分析需利用三维仿真来进行。
文献[4-10]研究了一种定子贴装永磁体的PRMB,结构示意图如图1所示。该PRMB包括两个径向定子,径向定子为左右相同的四齿两对极结构,位于两径向定子之间的永磁环采用轴向充磁,两侧的定子磁极极性相同,为同极性PRMB;产生控制磁通的径向控制绕组绕在定子磁极上,与永磁体共同作用,实现转子的径向两自由度悬浮。该PRMB的磁悬浮机理(以水平方向为例,磁路图如图1所示):在稳定状态下,转子上的合力为零,但若转子向左偏移,则右侧气隙增大,左侧气隙减小,此时右侧气隙中的控制与偏置磁通相互增强,左气隙中控制与偏置磁通相互减弱,在转子上形成向右的合力,将转子稳定在中心点。同理,向左和垂直方向工作原理相同。
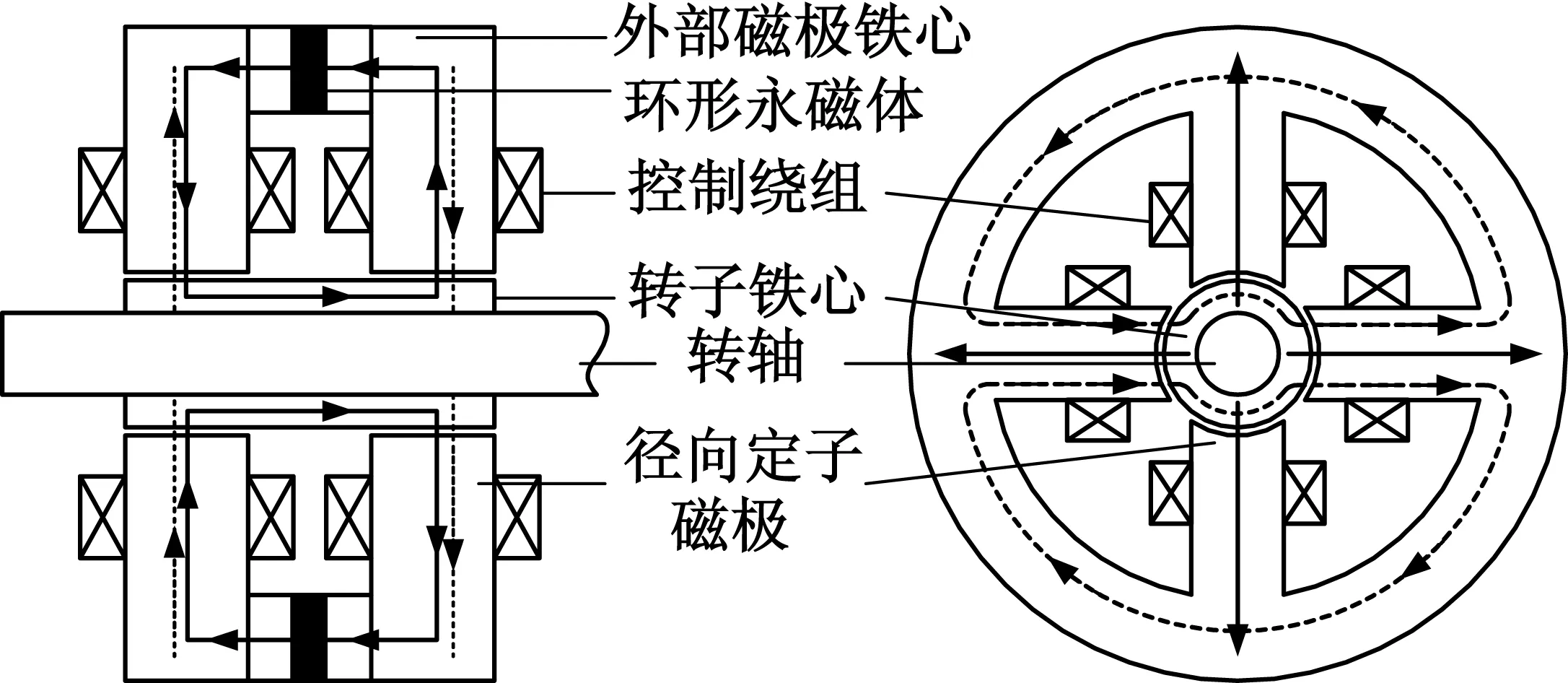
图1 同极性PRMB拓扑一结构示意图
该型PRMB轴向长度相对较长,绕组较多,结构较为复杂,但其径向磁极都能主动控制,悬浮性能较好,在实际中得到了较为广泛的应用。
文献[11]以上述拓扑为基础,提出一种有第二气隙的外转子PRMB,如图2所示。定子上套装有内导磁体,永磁体嵌于其内,永磁体外侧有第二气隙,作为控制通路。两自由度间通过隔磁体隔开,避免了磁通在径向两自由度之间的耦合,提高了控制性能,并将其用于磁悬浮飞轮装置中。但正是由于第二气隙的存在,导致偏置磁路及控制磁路的漏磁增大,损耗增大,同时结构复杂,加工及安装难度大。悬浮机理与拓扑一相同。
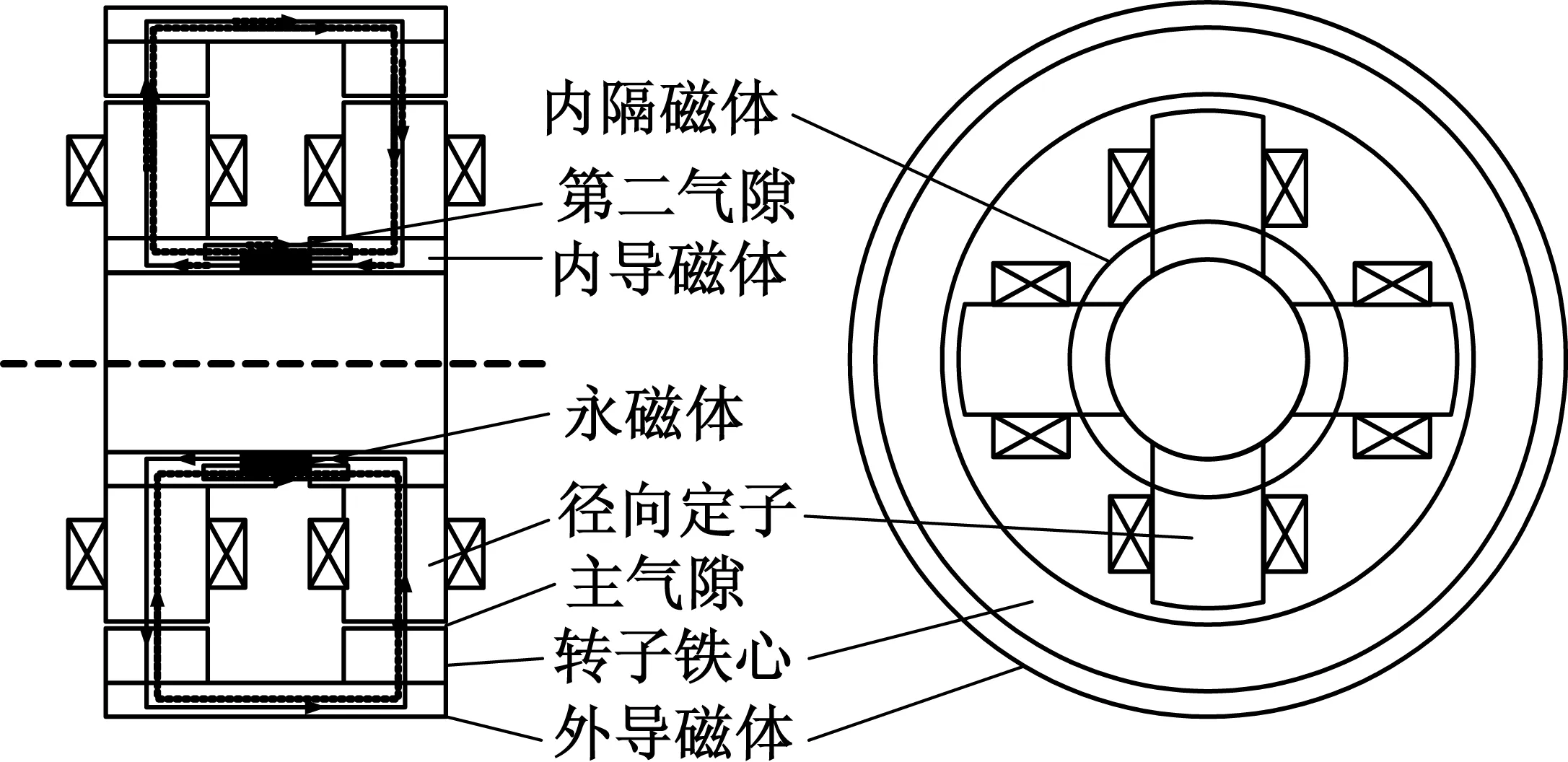
图2 同极性PRMB拓扑二结构示意图
文献[12]在图1的PRMB拓扑基础上,将两个控制绕组串成一个,置于转子外侧。文献[13]则将这种拓扑变换成外转子形式,用于支撑动量飞轮。该PRMB将转子铁心置于径向定子腔内,结构复杂,加工及安装难度较大。
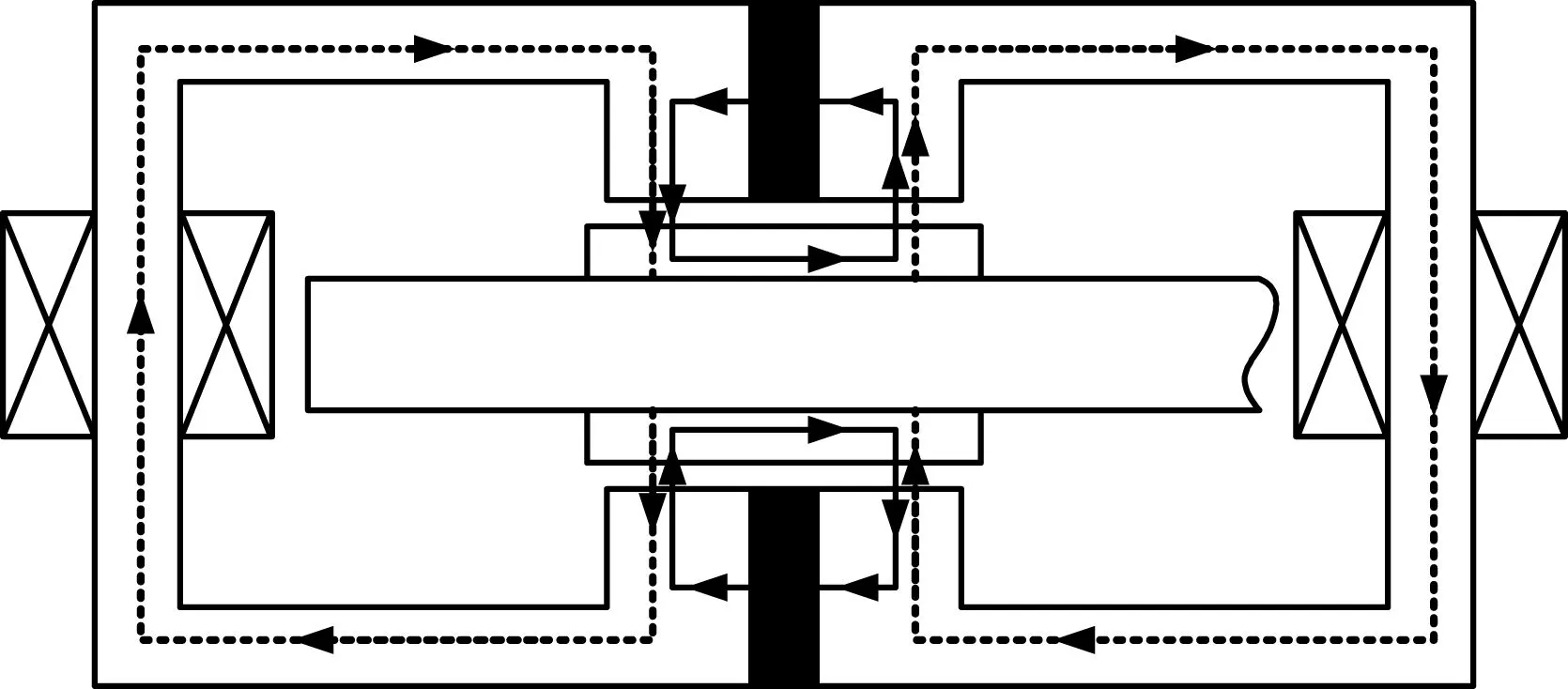
图3 同极性PRMB拓扑三结构示意图
由于拓扑一的PRMB有两侧径向定子,结构复杂,文献[14]研究了一种PRMB,如图4所示。一侧径向定子只作为偏置磁路,只用一侧径向定子控制悬浮,结构变得简单,轴承的轴向长度相对变短,有助于转子临界转速提高。但由于用作偏置磁路的径向定子不能主动控制,在转子偏心时,会产生相应的被动承载力,影响控制性能。文献[15]以此为对象进行了研究和设计。
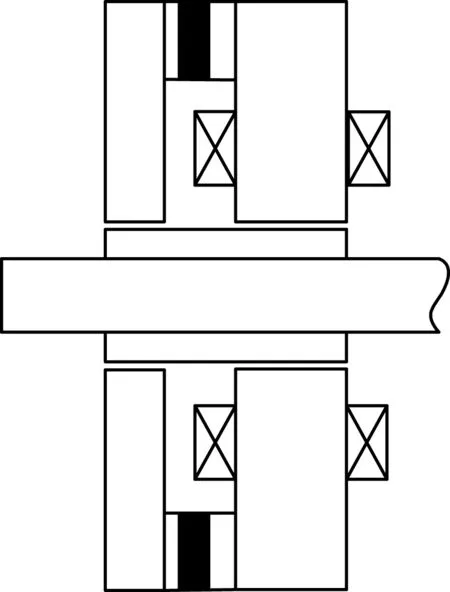
图4 同极性PRMB拓扑四结构示意图
文献[16]以上述PRMB为基础,将控制磁极改为八个磁极,如图5所示,旨在提高轴承的容错能力。
为了进一步简化磁轴承的结构,并利用传统三相逆变器作为开关功放,磁轴承研究人员提出将传统四磁极PRMB变换成三磁极,Boris.G对拓扑一PRMB进行了变换[17],如图6所示,结构变得简单,其悬浮控制需采用数字控制器来实现。其工作原理是基于交流电机的3/2坐标变换原理实现转子的径向两自由度悬浮。该型PRMB虽然减少了控制绕组,但径向两自由度控制磁通的耦合,反而增加了控制的难度,降低了悬浮性能。
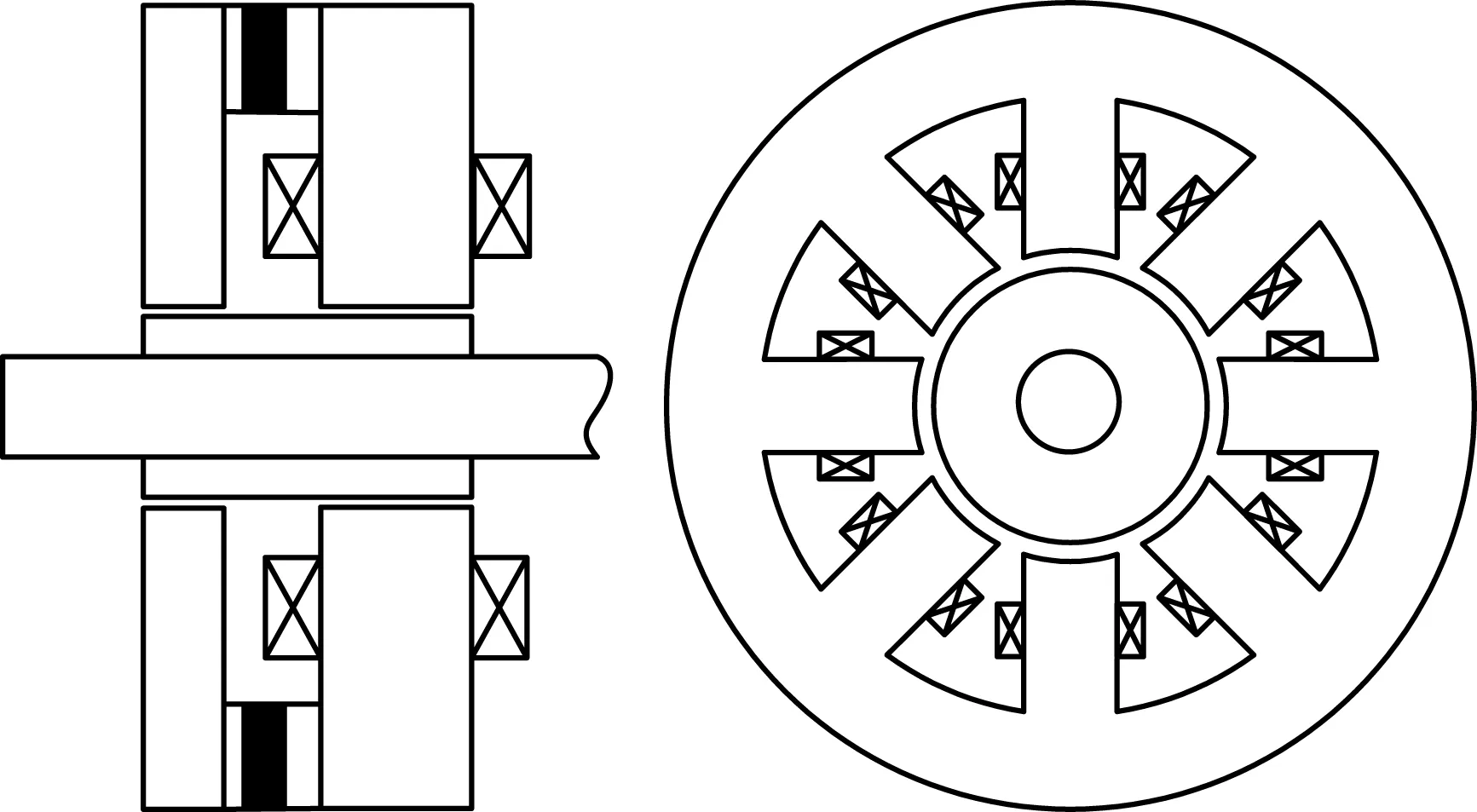
图5 同极性PRMB拓扑五结构示意图
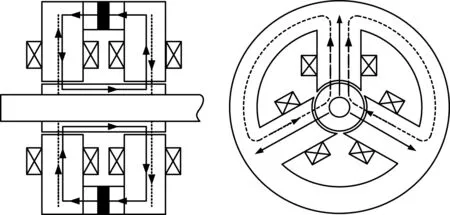
图6 同极性PRMB拓扑六结构示意图
文献[18]研究了一种应用于高温场合的PRMB,其以上述研究为基础,将拓扑一PRMB的径向定子由四磁极变换成六磁极,如图7所示。兼有容错和三磁极特点,永磁体由轴向充磁改为径向充磁,放置位置由定子中间变成置于两个径向定子外圆上。
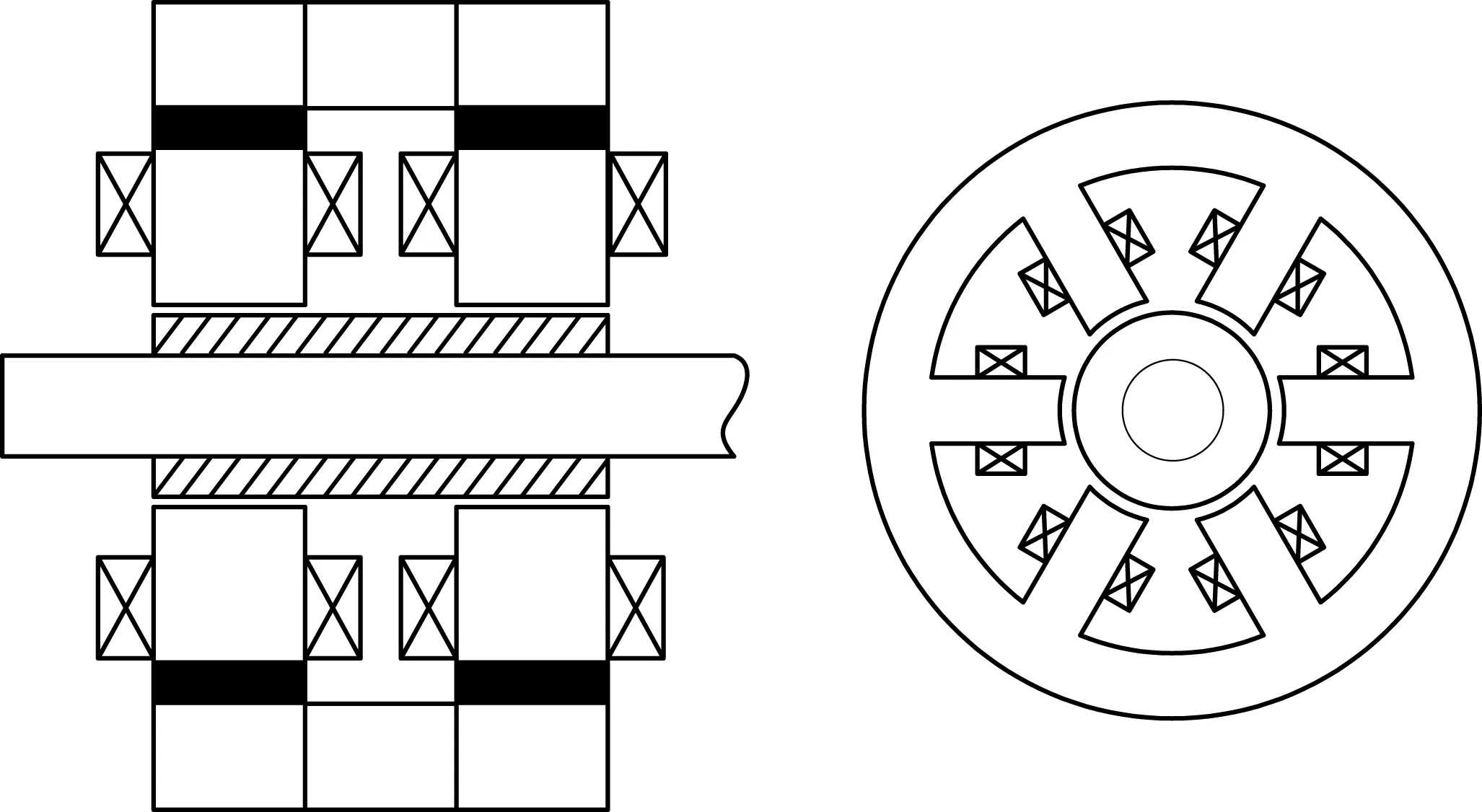
图7 同极性PRMB拓扑结构七结构示意图
Fukata.S于1996年提出了一种转子套装永磁体的PRMB[19],如图8所示。永磁体采用轴向充磁,贴装在两转子铁心间,两径向自由度间用隔磁材料隔开,旨在消除磁路耦合,但受限于转子铁心的外径,永磁体面积受到限制,导致永磁体长度较长,势必会增大磁路磁阻;同时,为防止高速旋转时永磁体脱落,永磁体需要包裹或固定,其悬浮机理与上述结构都相同。比较而言,定子加装永磁体的结构相比于转子永磁体的结构,结构稳定,加工安装方便。
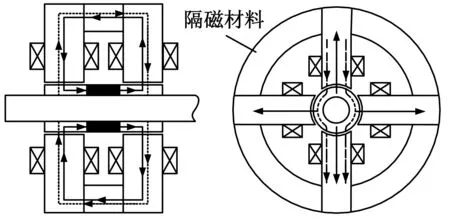
图8 同极性PRMB拓扑八结构示意图
文献[21]提出了一种同极性PRMB,如图9所示。其中,径向定子为四磁极结构,永磁环采用径向充磁,贴装在径向定子外表面,位于径向定子两侧的定子圆盘用作偏磁通路,其结构简单,磁路对称,但由于定子圆盘为被动控制,在高速旋转时会产生较大的被动悬浮力,增加了控制难度。
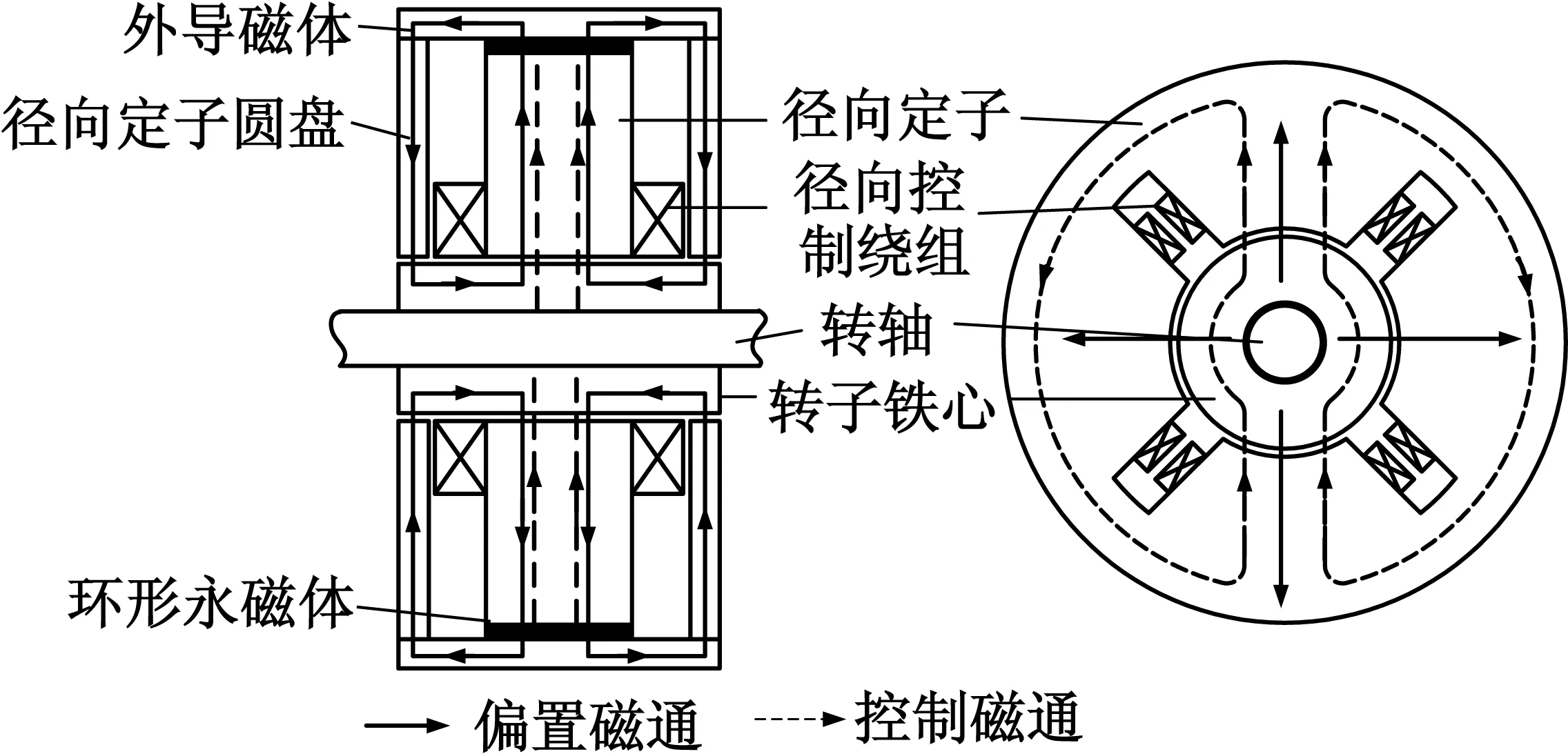
图9 同极性PRMB拓扑九结构示意图
文献[22]研究了一种用于动量飞轮的PRMB,其借助于拓扑一,将其变换成外转子结构形式,两自由度间利用隔磁材料隔开,偏置和控制磁通完全解耦,结构及磁路图如图10所示,但需要8个径向控制绕组产生控制磁通,结构较为复杂。

(a)(b)(c)(d)
(e)
2 异极性PRMB
相比于同极性PRMB,当偏置磁通在径向定子磁极上形成的磁极性不同时,即称为异极性PRMB。其涡流和磁滞损耗较大,但其偏置磁通和控制磁通在一个平面上流通,轴向长度较短,有助于转子临界转速的提高。
异极性PRMB的发展是伴随着永磁材料性能的提升而不断发展的,最初的拓扑都是在主动型磁轴承的基础上发展而来的,文献[23]研究了一种异极性PRMB,结构及磁路图如图11所示。从图11中可见,这种PRMB是在八磁极电励磁磁轴承的定子磁轭中插入圆弧状永磁体,利用永磁体提供偏置磁通,降低了磁轴承的励磁功耗,与控制磁通共同作用实现转子的径向两自由度悬浮。由于永磁体夹在定子磁轭中间,导致永磁体及整个磁轴承的制作加工都较为困难。
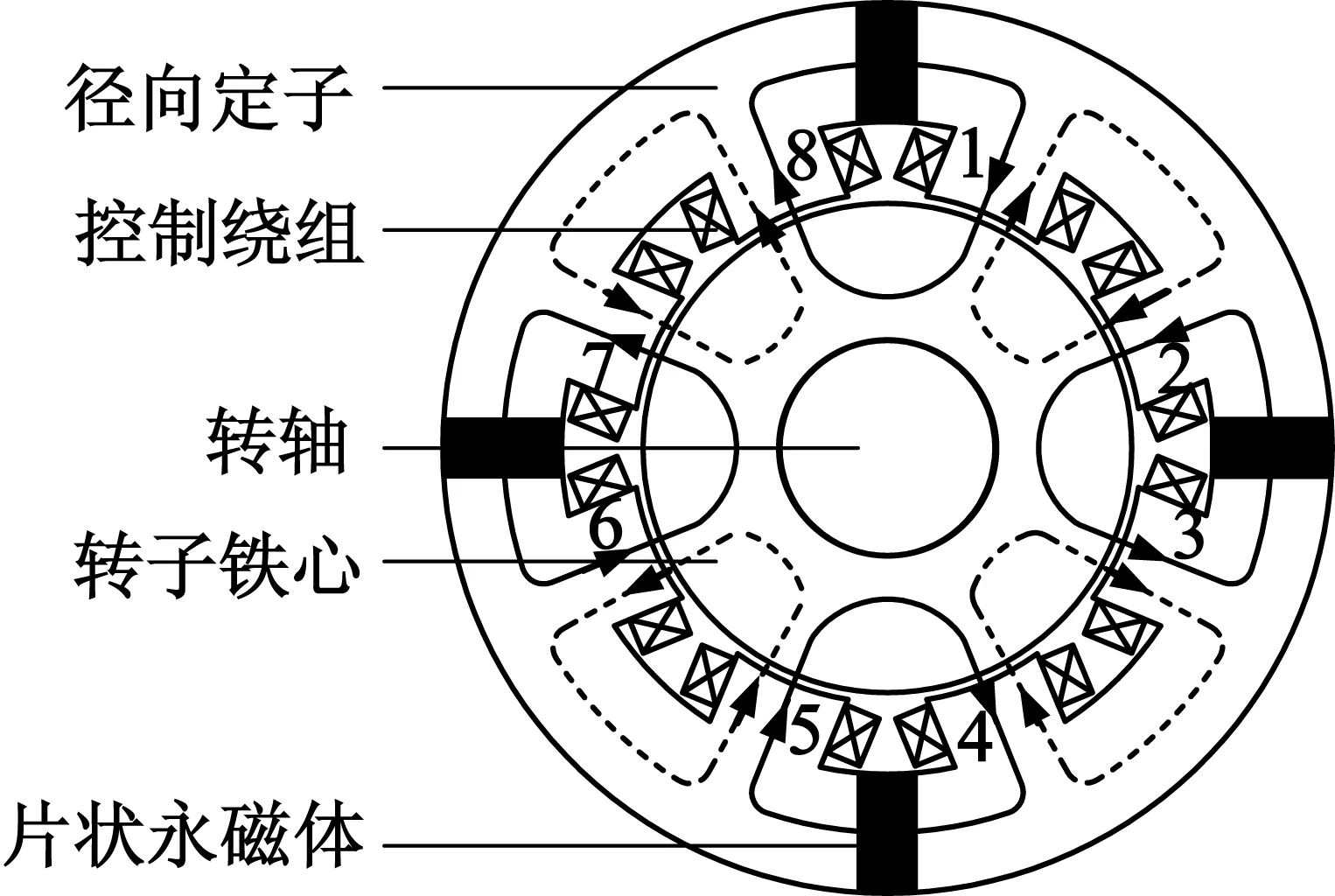
图11 异极性PRMB拓扑一结构示意图
就工作原理而言,异极性PRMB与同极性PRMB近似相同,具体到该型PRMB,当转子向左偏移,2、3磁极下控制磁通与偏置磁通是相加的,6、7磁极下控制磁通与偏置磁通是相减的,则转子铁心上产生向右的悬浮力。同理,在向右和垂直方向可以得出类似的结论。但从磁路图可见,在2、3磁极气隙磁通增大的同时,5、8磁极气隙磁通也增大,产生了方向向左的承载力,削弱了向右的主磁承载力,这就增加了磁轴承的励磁功耗,降低了磁轴承的悬浮性能。同时,在转子铁心偏心时,两自由度之间的耦合严重。
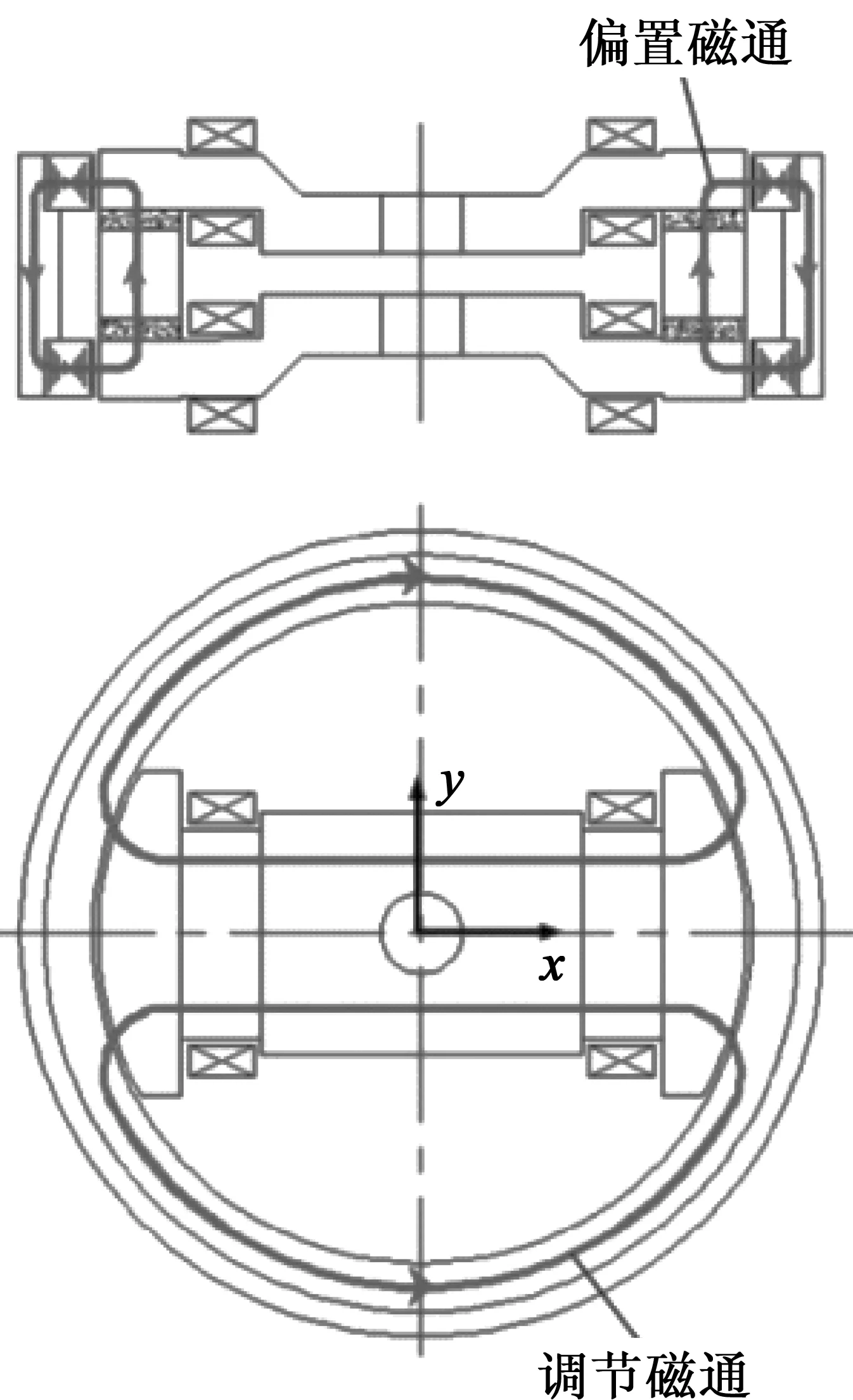
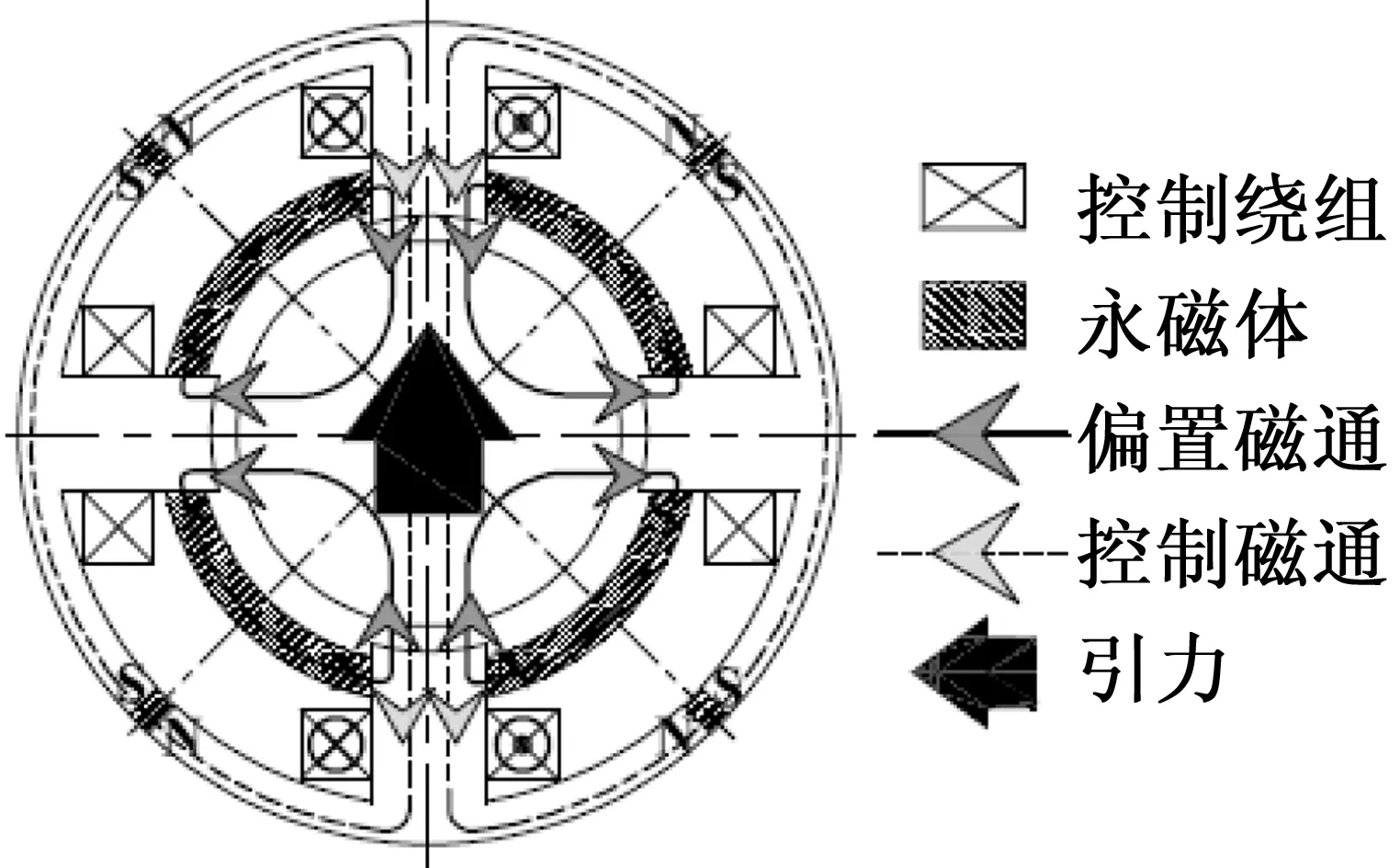
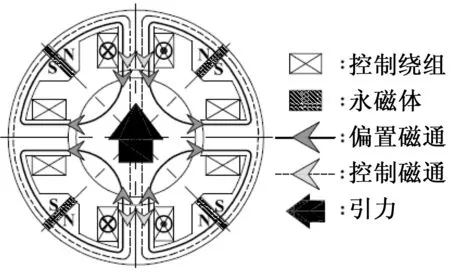
Christian. E在2004年第9届磁轴承会议上研究了一种异极性PRMB[24],其结构及磁路图如图12所示。该型PRMB与拓扑一相类似,同样是在定子磁轭中嵌入圆弧状永磁体,用于产生偏置磁通。为简化PRMB的结构,消除两自由度间的控制磁通耦合,控制磁极减少为四个。由于永磁体磁阻较大,在此附加了外部定子铁心作为控制磁路(如图12中虚线所示)。由于控制磁路置于转子外作为一附加磁路,磁路增长,结构复杂,增加了轴承的设计和加工难度。但其两自由度的控制磁路彼此独立,实现了很好的解耦,控制性能优越,其工作原理与拓扑一相类似。文献[25]研究了一种八磁极的PRMB,如图13所示。有四个控制磁极,四个嵌装片状永磁体的永磁磁极,相比于图11,结构大为简化,偏置磁极性交替排列,控制绕组串联相接。国内外众多文献对其研究较多[2,26-27],其工作原理与同极性PRMB近似相同。
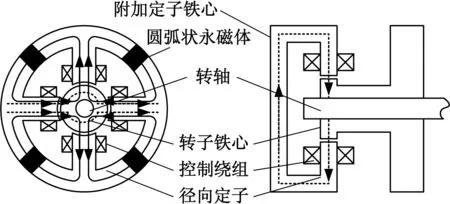
图12 异极性PRMB拓扑二结构示意图
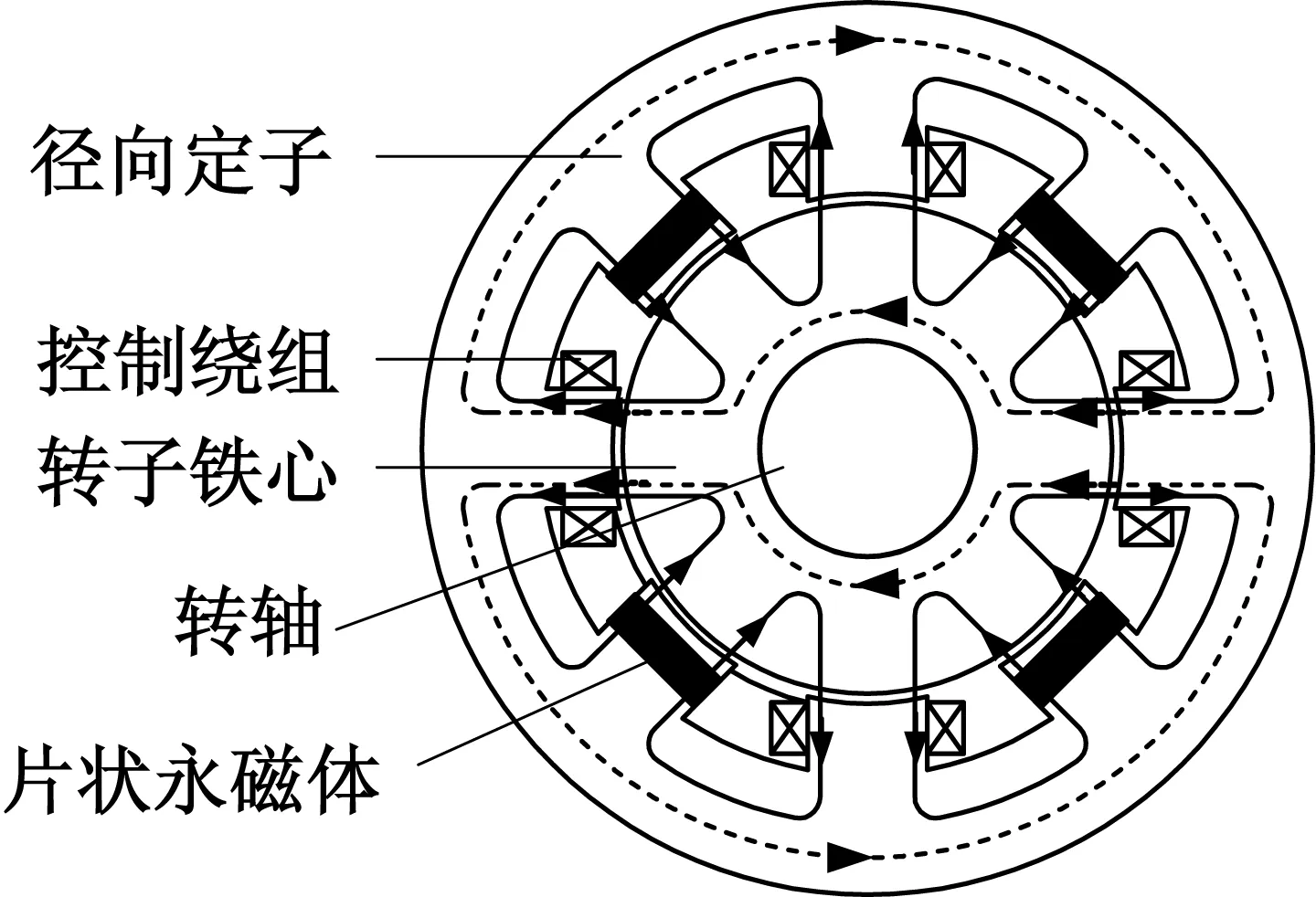
图13 异极性PRMB拓扑三结构示意图
但该型PRMB四个永磁磁极为被动控制,在转子高速悬浮时,这种被动悬浮力会增大PRMB的励磁功耗。针对该型PRMB的优缺点,文献[27]对其进行了性能分析及参数优化设计。文献[28]也对其提出了改进的拓扑结构,其结构图如图14所示。图14(a)利用平行于径向定子的环形片状永磁体提供偏置磁通,为避免永磁体通过径向定子形成闭合回路,在径向定子磁轭中加装片状永磁体用以隔磁,迫使永磁磁通通过转子铁心。但这种PRMB结构复杂,漏磁严重,永磁体安装困难且得不到充分利用。图14(b)则是在径向定子磁轭中加装片状永磁,控制磁通经过永磁体,为解决永磁磁阻大的问题,将控制磁极气隙设定为大气隙,与永磁体的充磁方向的厚度相同。但这种结构必然会导致非常大的漏磁,控制磁路的磁阻大,效率较低。
(a)径向定子间加装永磁体的磁轴承
(b)定子磁轭中加装永磁体的磁轴承
文献[29]提出了一种用于磁悬浮动量飞轮的异极性PRMB,如图15所示。它为外转子结构,结构与图14(b)相类似,但在永磁体处留有第二气隙,用于作为控制磁通的磁路。相比于上述结构,励磁损耗得以减小,但第二气隙的存在势必会增大永磁体的漏磁,增加控制磁路的磁阻,增大磁轴承的励磁损耗。
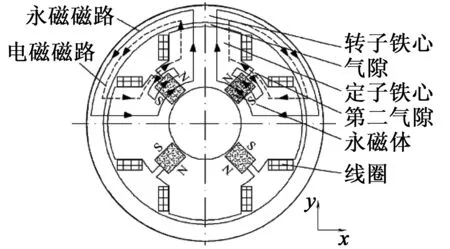
图15 异极性PRMB拓扑五结构示意图
文献[30]中也提出了一种改进型结构,如图16所示。结构更为复杂,径向磁极的加工和安装都极为困难,其利用前后两个磁轴承叠装而成,每个磁轴承控制一个径向自由度,相比于八磁极径向磁轴承,设计加工极为困难,控制绕组增加一倍,磁轴承的励磁功耗较大。
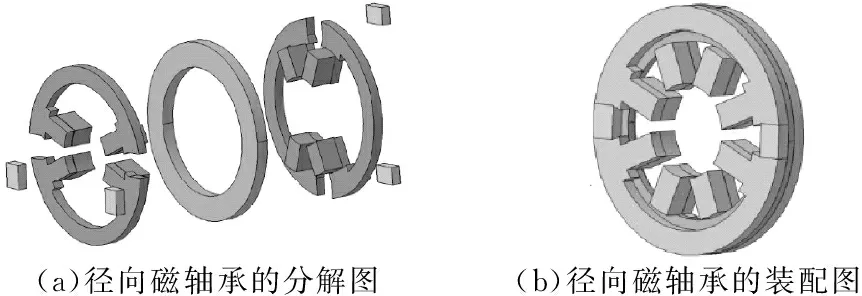
(a)径向磁轴承的分解图(b)径向磁轴承的装配图
图16 异极性PRMB拓扑六结构示意图
文献[31]提出了一种采用外转子形式的异极性PRMB,如图17所示,用于动量飞轮。径向定子利用隔磁材料隔开,控制磁路解耦,但偏置磁路彼此耦合,同时外转子不易采用硅钢片叠压,铁损较大,需利用八个径向控制绕组实现转子的径向悬浮,结构较为复杂。
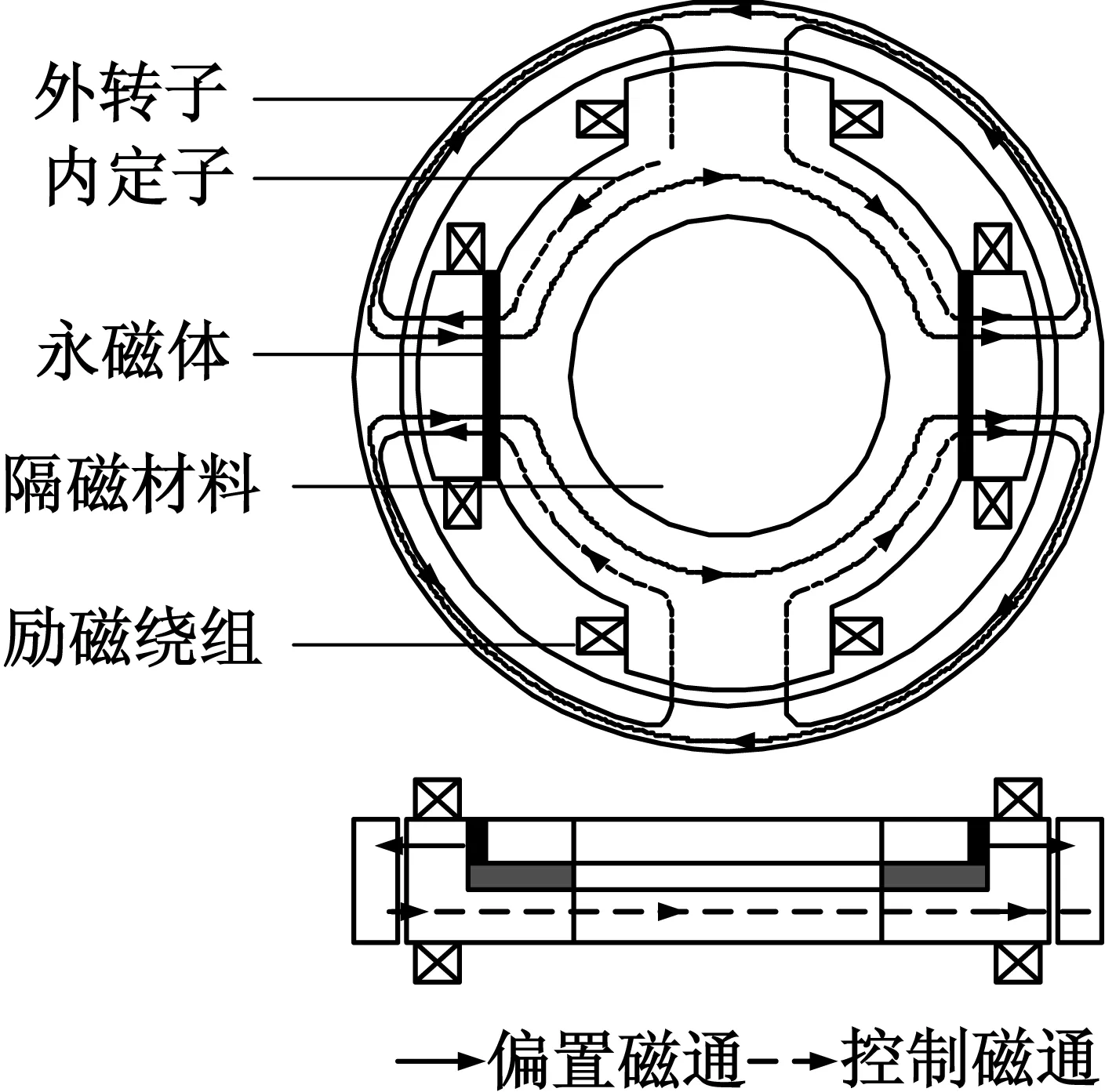
图17 异极性PRMB拓扑七结构示意图
与同极性PRMB相同,国内外研究人员同样将三磁极应用于异极性PRMB。 Reisinger.M研究了一种六磁极PRMB[32],如图18所示。相比于图13,永磁磁极和控制磁极都变成三个,利用3/2变换原理实现径向两自由度的悬浮;同样,其径向两自由度之
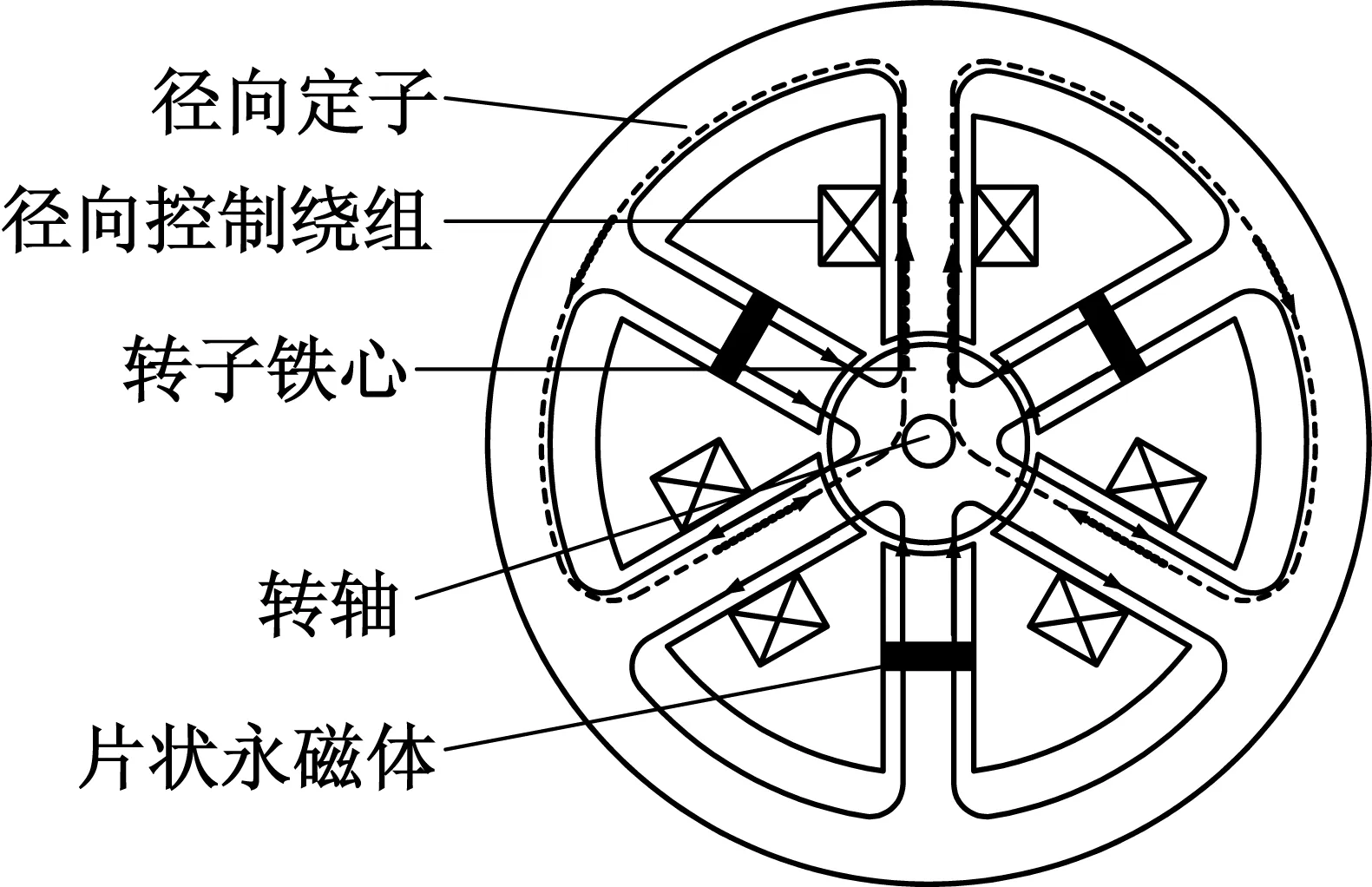
图18 异极性PRMB拓扑八结构示意图
间彼此耦合,反而增加了控制的难度。文献[33]将其变换为外转子结构形式,用于大容量硬盘存储设备中。
3 PRMB拓扑的未来展望
PRMB作为一种低功耗磁轴承,其拓扑形式的选择与应用场合密切相关,对应用需求进行分析,选择并设计出适合于某场合的功耗低、结构简单、控制方便的PRMB应是未来主要的研究内容:
(1)功耗低、结构简单、设计加工安装方便是一个主要方向。从降低功耗而言,可将同极性PRMB定子槽闭合,减少偏置磁通在磁极间的变化,降低转子铁心中的铁损,降低整个PRMB损耗,但控制绕组的嵌线相对困难,需采用穿线的方式进行。从结构简单而言,可将四磁极变换为三磁极,利用三相逆变器作为开关功放,但自由度之间磁路要耦合;同时,同等承载力的情况下,三磁极PRMB轴向长度要长[34],这都制约其在超高速场合的应用。
(2)由于异极性PRMB是共面PRMB,漏磁较小,轴向长度相比于同极性PRMB相对较短,有助于转子临界转速的提高。在电励磁磁轴承结构的基础上,通过将永磁体间隔加装在定子磁极或定子磁轭上,可制成异极性PRMB,但要考虑永磁磁极的被动控制。
(3)将PRMB的径向定子磁极数增加为八个或六个,可使其具有径向容错、冗余功能。
(4)在设计时,在不影响气隙磁通的情况下,要尽可能降低PRMB的加工和安装难度。如将一些轴向充磁的永磁体变换成径向充磁,通过改变其安装位置,以求降低实际中的加工和安装难度。
(5)当PRMB应用于动量飞轮或飞轮储能电池中时,为进一步提高飞轮质量,可将PRMB变换成外转子结构形式。
(6)在高速磁盘、制药等特殊应用领域,由于结构或位置的要求,可将多种异极性PRMB制成薄片状。
(7)为进一步提高控制性能,可考虑如何利用隔磁材料消除径向两自由度间的磁路耦合。
4 结 语
PRMB利用永磁体提供偏置磁通,功耗低,能够实现转子的径向两自由度悬浮,在磁轴承中应用最为广泛。本文研究了具有代表性的PRMB拓扑结构,分析其结构及工作原理,并就PRMB拓扑的未来研究进行了展望,综合而言,低功耗直至零功耗、结构更为简单、加工和安装方便、控制性能优越的PRMB仍将是未来研究的一个主要方向。
[1] SCHWEITZER G,BLEULER H,TRAXLER A.Active magnetic bearings-basics,properties and application of active magnetic bearing[M].Hochschulverlag AG,1994.
[2] 赵旭升,邓智泉,汪波.异极性永磁偏置径向磁轴承的参数设计与实现[J].电工技术学报,2012,27(7):131-138.
[3] 梅磊,朱剑,张广明,等.永磁偏置轴向磁悬浮轴承的类型划分与拓扑结构设计[J].微特电机,2013,43(11):12-15.
[4] LEE A C,HSIAO F Z,DENNIL K.Analysis and testing of magnetic bearing with permanent magnets for bias[J].JSME International Journal,1994,37(4):774-782.
[5] LEE A C,HSIAO F Z, DENNIL K.Performance limits of permanent-magnet-biased magnetic bearings[J].JSME International Journal,1994,37(4):783-794.
[6] SATORU F,KAZUYUKI Y.Analysis of magnetic systems of magnetic bearings biased with permanent magnets[J].Memories of the Faculty of Engineering,Kyushu University,1997,57(1):17-35.
[7] ZHILICHEV Y.Analysis of a magnetic bearing pair with a permanent magnet excitation[J].IEEE Transactions on Magnetics,2000,36(5):3690-3692.
[8] 曾励,汪通悦,徐龙祥,等.永磁电磁轴承产生承载力的机理研究[J].航空学报,2000,21(3):219-221.
[9] 曾励,章婷,赵红兵.永磁电磁轴承的PDF控制系统性能研究[J].现代制造工程,2003,(4):69-71.
[10] 孙津济,房建成.磁悬浮飞轮用新型永磁偏置径向磁轴承的设计[J].轴承,2008,(3):8-13.
[11] 房建成,杨磊,孙津济,等.一种磁悬浮飞轮用永磁偏置径向磁轴承[J].光学精密工程,2008,16(3):444-451.
[12] 曾励,朱熀秋,曾学明,等.永磁偏置的混合磁悬浮轴承的研究[J].中国机械工程,1999,10(4):387-389.
[13] SCHARFE M,ROSCHKE T,BINDL E,et al.Design and development of a compact magnetic bearing momentum wheel for micro and small satellites[C]//15th Annual/USU conference on small satellites,2001:1-9.
[14] SORTORE C K,ALLAIRE P E,MASLEN E H,et al.Permanent magnet biased magnetic bearings-design, construction and testing[C]//2nd International Symposium on Magnetic Bearings, Japan, 1990: 175-182.
[15] 虞烈.可控磁悬浮转子系统[M].北京:科学出版社,2003.
[16] NA U J.Fault tolerance of homopolar magnetic bearings[J].Journal of Sound and Vibration,2004,272(3/4/5):495-511.
[17] GRBESA B.Low loss and low cost active radial homopolar magnetic bearing[C]//6th International Symposium on Magnetic Bearings,MIT:Technomic Publishing Co.Inc,1998:286-295.
[18] HOSSAIN M A.High temperature,permanent magnet biased,homoploar magnetic bearing actuator[D].US:Texas A&M University,2006.
[19] FUKATA S,YUTANI K.Characteristics of electromagnetic systems of magnetic bearings biased with permanent magnets[C]//6th International Symposium on Magnetic Bearings,MIT:Technomic Publishing Co.Inc.,1998:234-243.
[20] XU Y L,DUN Y Q,WANG X H,et al.Analysis of hybrid magnetic bearing with a permanent magnet in the rotor by FEM[J].IEEE Transactions on Magnetics,2006,42(4):1363-1366.
[21] 赵旭升,邓智泉,汪波.永磁偏置径向磁轴承的原理分析与参数设计[J].电工技术学报,2011,26(11):127-134.
[22] LI Yong,LI Wei,LU Yongping.Computer-aided simulation analysis of a novel structure hybrid magnetic bearing[J].IEEE Transactions on Magnetics,2008,44,(10):2283-2287.
[23] KENNY A.Nonlinear electromagnetic effects on magnetic bearing performance and powerless[D].US:Texas A&M University,2001.
[24] EHMANN C,SIELAFF T,NORDMAN R.Comparison of active magnetic bearings with and without permanent magnet bias[C]//9th International Symposium on Magnetic Bearings,Lexington,Kentucky,2004:105-110.
[25] OKADA Y,KOYANAYI H,KAKIHARA K.New concept of miracle magnetic bearings[C]//9th International Symposium on Magnetic Bearings,Lexington,Kentucky,2004:89-95.
[26] 黄峰,朱熀秋,谢志意,等.径向二自由度混合磁轴承参数设计分析[J].中国机械工程,2007,18(10):1143-1146.
[27] 赵旭升.永磁偏置异极性径向磁轴承性能分析与参数优化[J].微特电机,2015,42(12):41-44.
[28] OKADA Y,SOGAWA K,SUZUKI E,et al.Development and application of parallel PM type hybrid magnetic bearings[C]//11th International Symposium on Magnetic Bearings,Nara,Japan,2008:18-24.
[29] 孙津济,房建成,王曦,等.一种新型结构的永磁偏置径向磁轴承[J].电工技术学报,2009,24(11):53-60.
[30] NA U J,KANG H O,LEE D D,et al.Design and Analysis of new permanent magnet biased hetropolar magnetic bearings[C]//Proc 11th International Symposium on Magnetic Bearings,Nara,Japan,2008:594-597.
[31] 王曦,石泳,樊亚洪,等. 磁悬浮飞轮用新型异极性永磁偏置径向磁轴承[J].宇航学报,2014,35(12):1457-1464.
[32] REISINGER M,AMRHEIN W,SILBER S,et.al. Development of a low cost permanent ,magnet biased bearing[C]//9th International Symposium on Magnetic Bearings, Lexington,Kentucky,2004:113-118.
[33] PARK S H,LEE C-W.Decoupled control using redundant coordinates for three pole hybrid active magnetic bearings system[C]//11th International Symposium on Magnetic Bearings,Nara,Japan,2008:287-294.
[34] STEFFANI H F,HOFMANN W.Design and comparison of different kinds of radial magnetic bearings[C]//7th International Symposium on Magnetic Bearings,ETH,2000:461-466.
Research and Development of Permanent Magnet Biased Radial Magnetic Bearing Topology
ZHAOXu-sheng
(Nanjing Polytechnic Institue,Nanjing 210048,China)
Permanent magnet biased radial magnetic bearing (PRMB) which can achieve 2-D suspension of rotor,is the most widely used for the permanent magnet biased magnetic bearing. In this paper, the research status of permanent magnet biased radial magnetic bearing were expounded in detail. PRMB were sorted as homopolar and heterpolartwo types radial magnetic bearing. Their configurations and operating principles were studied. Same type's magnetic bearings were compared and where they can be applied was pointed out. Many PRMBs' topologies were advanced. PRMB with low power consuming, simple structure and easy controlled will be a primary researching direction.
permanent magnet biased radial magnetic bearing (PRMB); topology configuration; operating principle; development
2015-06-15
江苏省第四批“333”资助项目
TH133.3;TM351
A
1004-7018(2016)01-0081-06
赵旭升(1971-),男,博士,教授,研究方向为电机控制、磁轴承技术。
