基线向量构网方式对线路工程卫星定位控制网精度影响的研究
2016-12-06郭江
郭 江
(铁道第三勘察设计院集团有限公司,天津 300251)
基线向量构网方式对线路工程卫星定位控制网精度影响的研究
郭 江
(铁道第三勘察设计院集团有限公司,天津 300251)
《铁路工程卫星定位测量规范》中要求工程控制网应由一个或多个独立的观测环构成,而构成的这些观测环又可以分成单基线四边形网和多基线三角形网两种。对比分析四个不同地区不同大小的控制网实例,分别采用这两种构网方式进行平差。计算结果表明,两种方法最终的坐标平差成果相差不大,均可满足铁路工程勘察设计及施工的精度要求,但精度指标有明显的差异。
基线向量 构网方式 平差 精度评定
铁路建设基本上都是线性工程,其布设的控制点都沿着线路的走向,构成的网形也是线性的。卫星定位有其特有的优势:方法灵活多样、全天候、操作简便等,使得卫星定位施测工程控制网已成为当前的主流方式。
通过对构网方式的研究,提升卫星定位施测控制网的可靠性,为工程的实施提供更准确的基础数据;通过现场试验并不断改进作业方法,提升质量控制管理的能力。
1 基线向量原理及解算原理
不同模式的基线,其解算方法存在着一定的差异性,所以基线解算的结果及其质量也不完全相同。基线解算模式主要包含整体解模式、多基线解模式、单基线解模式三种。本文主要研究的是后两种模式。
多基线解模式(Multi Baseline Mode):基线按逐时段进行解算,就是指在进行解算基线的时候,选择某一个观测时段中全部同时进行测量的n台GPS所观测的同步数据,同时解算出n-1条相互数学函数独立的基线。
单基线解模式(Single Baseline Mode):最常用也是最简单的一种模式,逐条进行基线解算。解算时,一次仅仅提取两台GPS的同步观测数据来解算其之间的基线向量。
2 卫星定位构网及解算原理
卫星定位基线向量构网形式一般分为五种:会战式、跟踪站式、同步图形扩展式、单基准站式和多基准站式。目前在大多数工程项目中都采取同步图形扩展式进行构网,本文也采用这种构网形式进行研究分析。同步图形扩展式是指在不同的测站上同时架设GPS接收机,同时进行观测,第一个时段同步观测完成后,除搭接的2台GPS接收机以外,其余接收机都搬迁到其它测站上再进行同步观测,每次观测图形都可以形成一个同步观测环。在测量过程中,不同的观测图形之间都有若干个搭接点相连,使得整个GPS网相接,构成一个整体网形。。
在卫星定位观测中,如果同步观测的仪器个数是m,那么每一个观测时段得到的基线向量数是m·(m-1)。其中独立基线向量个数是(m-1),其它均是非独立基线向量。铁路卫星定位测量中常常使用4台GPS接收机进行同步观测,每一个时段可获得6条基线,其中3条独立基线,3条非独立基线。最常见的单基线构网方式如图1,构成单基线四边形网;多基线构网方式如图2,构成同步多基线三角形网。
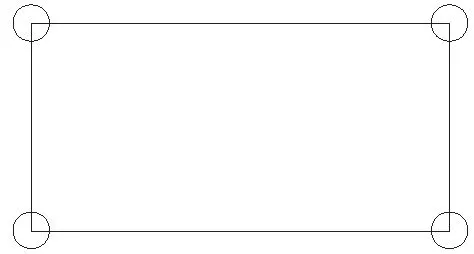
图1 单基线四边形网(方案a)
控制网平差的时候,可以把控制网的平差分成自由网平差(无约束平差)、约束平差和联合平差三种,三者均采用间接平差的原理来进行解算。
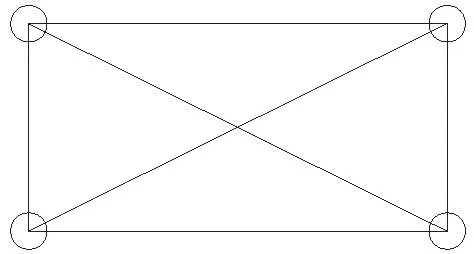
图2 多基线三角形网(方案b)
参心坐标系下的基本观测方程为
对于一个由n个点m条基线向量所构成的控制网,其总的误差方程为

方差-协方差阵为
3 工程实例
分别选取四个不同地区、不同大小的卫星定位控制网(CPI和CPII),采取两种不同构网方式(方案a和方案b)进行平差计算,基线解算采用商用软件LGO7.0,平差计算采用同济大学的软件TGPPS8.0(已通过软件认证)。3.1 沈丹客专项目(山区)实例
以沈丹客专项目CPI卫星定位控制网数据为例,通过基线解算和平差计算,无约束平差和约束平差指标精度均满足相关规范要求,表明两种计算方法正确。下面通过平差坐标成果、约束后方位角中误差、约束后边长相对中误差和单位权中误差4个指标来对比分析两个方案的差异,如表1(篇幅所限,表中仅列出部分数据)。
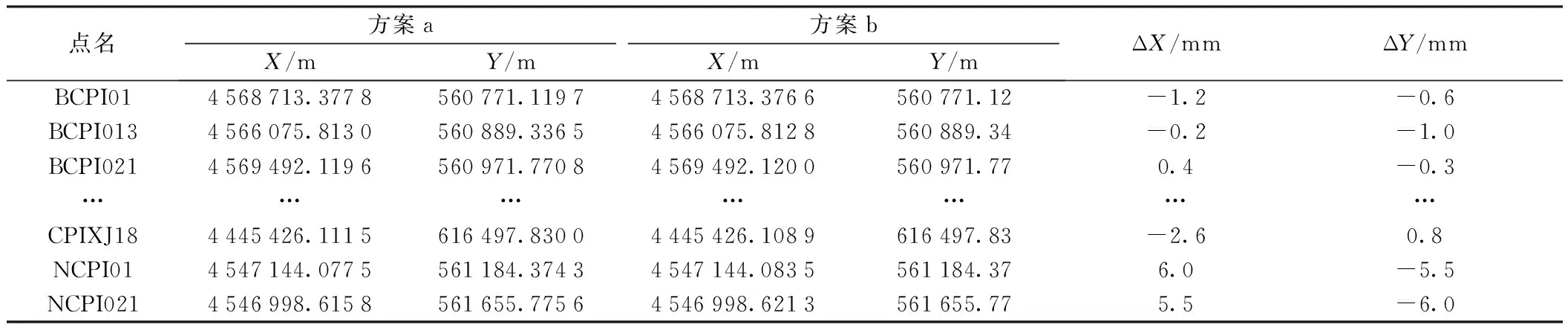
表1 两种基线构网方式坐标成果较差统计
通过表1对比分析可以看出(仅列出部分数据),两种基线构网方式在相同约束点条件下进行平差解算,坐标较差X方向最大差值-14.0 mm,平均值-0.8 mm,标准差4.8 mm,Y方向最大差值-10.5 mm,平均值0.8 mm,标准差3.1 mm。说明两种构网方式的CPI平差坐标成果较差都很小。由图3分析得出,共有134个点的X、Y方向差值均小于5 mm,占其比例为90.3%。
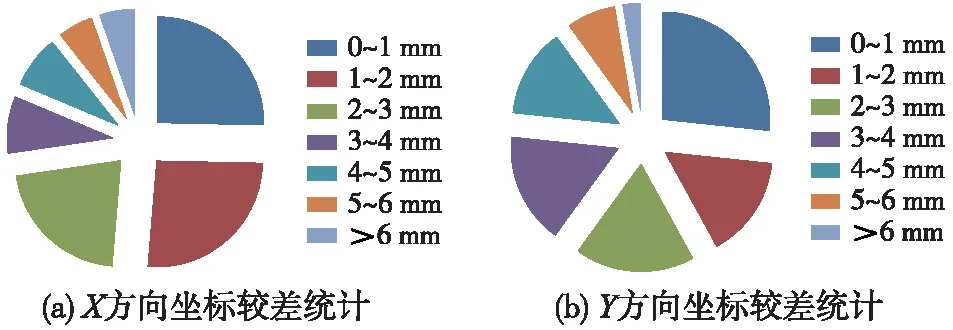
图3 两种基线构网方式约束平差后坐标较差统计
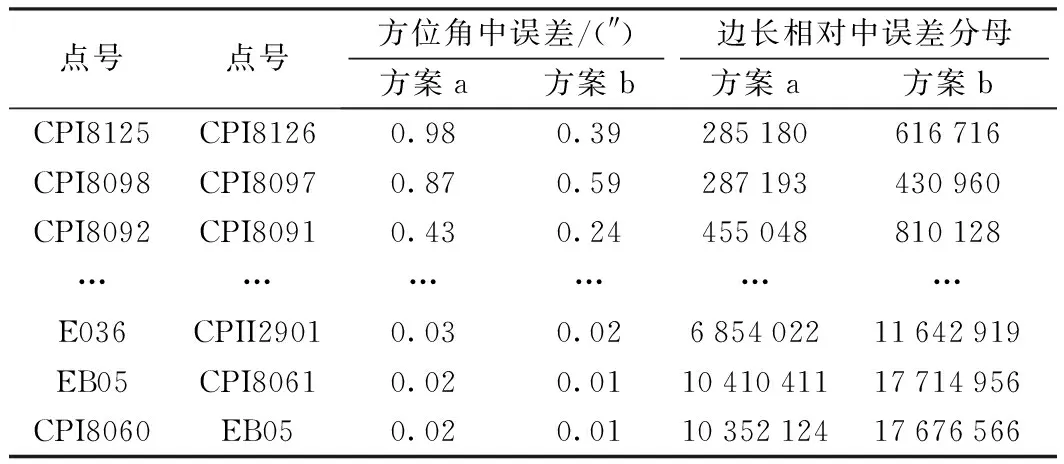
表2 两种基线构网方式约束平差精度对比
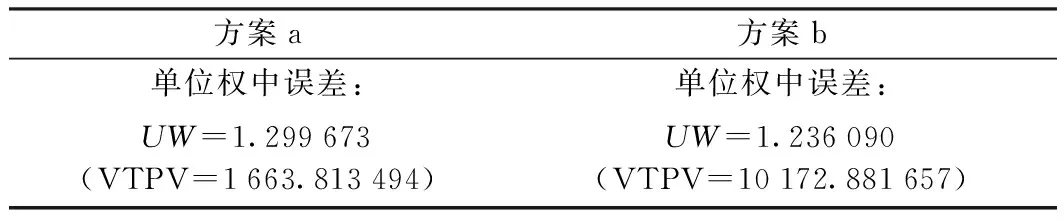
表3 两种基线构网方式单位权中误差对比
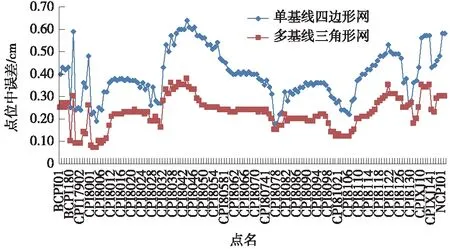
图4 两种基线构网方式约束平差后点位中误差比较
通过表2、图4分析可得,方案a的基线方位角中误差、边长相对中误差平均为方案b的1.8倍,约束后点位中误差为1.7倍;通过表3可以看出,方案a的单位权中误差也略高于方案b。3.2 济青高铁项目(平原地区)实例
通过表4对比分析可以看出(仅列出部分数据),两种基线构网方式在相同约束点条件下进行平差解算,坐标较差X方向最大差值-2.6 mm,平均值-0.4 mm,标准差1.1 mm,Y方向最大差值-4.4 mm,平均值-0.1 mm,标准差1.4 mm。说明两种构网方式的CPI平差坐标成果较差都很小。由图5分析得出,所有点(75个)X、Y方向的差值均小于5 mm。
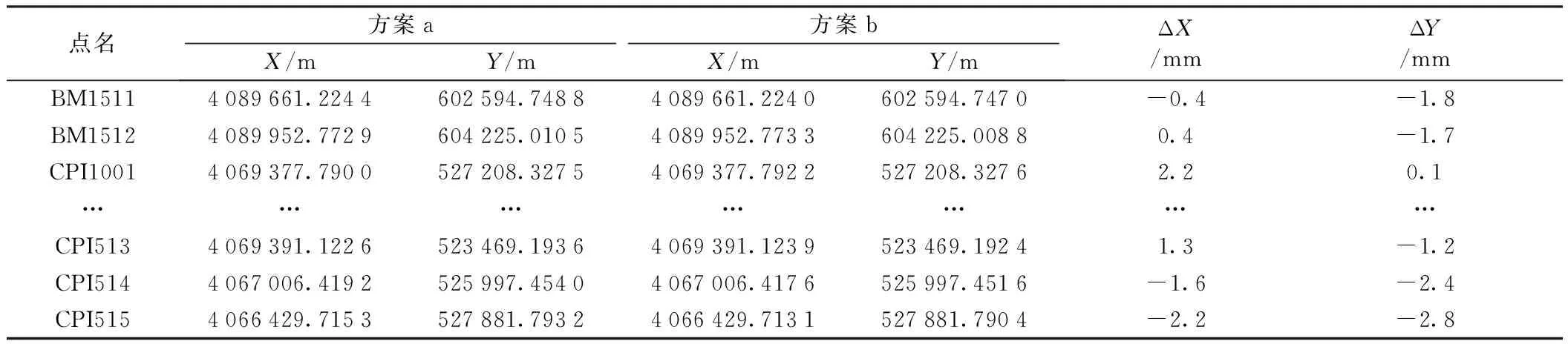
表4 两种基线构网方式坐标成果较差统计

图5 两种基线构网方式约束平差后坐标较差统计
通过表5、表6、图6分析可得,方案a的基线方位角中误差、边长相对中误差和点位中误差均为方案b的1.3倍,单位权中误差也高于方案b。
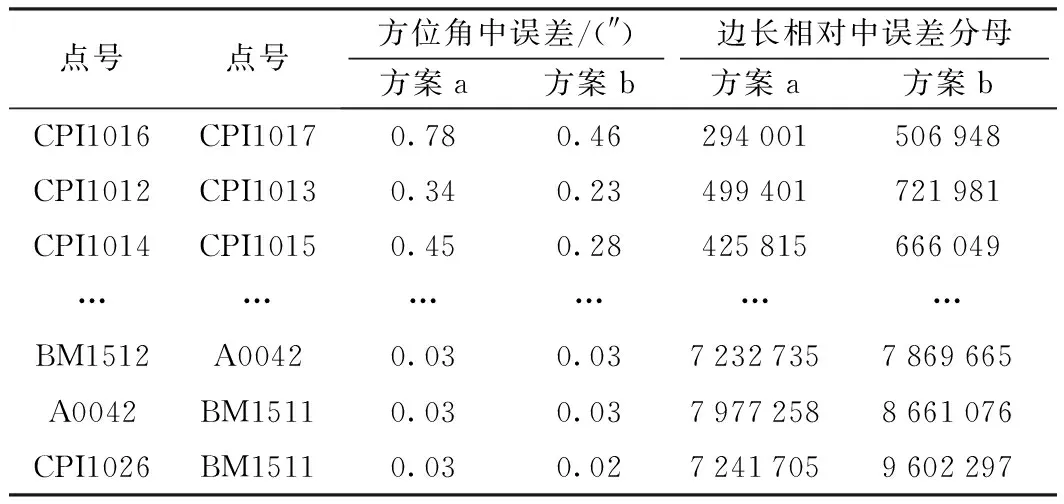
表5 两种基线构网方式约束平差精度对比

表6 两种基线构网方式单位权中误差对比
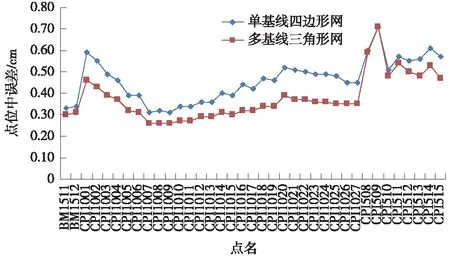
图6 两种基线构网方式约束平差后点位中误差比较
3.3 统计分析
对比分析两种方法的精度指标和坐标成果,统计四个不同地区的项目控制点共计635个点,坐标较差最大为X方向-19.7 mm。说明两种构网方式对坐标成果影响不大(如表7、图7所示)。

表7 两种基线构网方式约束平差后坐标较差统计
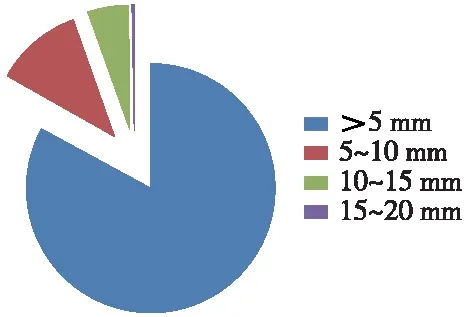
图7 两种基线构网方式约束平差后坐标较差统计
通过对比约束后方位角中误差、边长相对中误差和点位中误差,单基线四边形网平均为多基线三角形网的1.5倍。说明多基线三角形控制网的整体精度高于单基线四边形控制网,分析其原因为,三角形网引入了更多的多余观测数据,增强了基线之间的相关性,使整个控制网的强度更高,可靠性更好。
4 结论
综上所述,通过比对不同地区控制网的坐标成果和精度指标,可以得出如下结论:
(1)两种构网方式对坐标成果影响都比较小,最大为-19.9 mm,二者都可满足铁路工程勘察设计及施工的精度要求.
(2)在平原地区,两种构网方式的坐标成果较差、精度指标都相差不大.
(3)在山区或者丘陵地区,两种构网方式的坐标成果较差、精度指标都相差较大,并且多基线三角形网的精度指标明显高于单基线四边形网。
(4)在山区或者控制网比较大的时候,可以分段选择多基线三角形构网,以提高整网的精度;如果整网平差计算,应尽量选择单基线四边形构网,基线数量相对较少,计算工作量小,可以节省很大的人力成本。
[1] 李群科.基线选取对铁路工程平面控制网平差的影响研究[J].铁道勘察,2015(1)
[2] 王国祥.GPS基线解算与质量控制[J].铁道勘察,2005(6):7-10
[3] 张先文.GPS技术在铁路勘测中的系统应用[J].铁道勘察,2007,33(4)
[4] 滕焕乐.隧道GPS控制网横向贯通误差计算方法研究及软件研制[J].铁道勘察,2013(2):4-6
[5] 胡伍生,等.GPS测量原理及其应用[M].北京:人民交通出版社,2002
[6] 铁道部.TB10054—2010铁路卫星定位工程测量规范[S].北京:中国铁道出版社,2010
[7] 彭先进.测量控制网的优化设计[M].武汉:武汉测绘科技大学出版社,2010
[8] 徐永刚.高速铁路精密测量技术在城市轨道交通中的应用研究[J].铁道勘察,2013(2)
[9] 高强.高海拔地区控制网长度变形异常的处理[J].铁道勘察,2013(2)
[10]陶本藻.GPS网数据处几个问题[J].现代测绘,2003(6)
[11]朱江,包欢.控制网优化设计中的蒙特卡罗法[J].测绘科学技术学报,2003,20(3):174-176
[12]赵庆海,田庆新.高精度GPS基线向量网平差[J].测绘科学技术学报,2002(3)
Research on the Influence of the Baseline Vector Construction Method on the Accuracy of Line Engineering Satellite Positioning Control Network
GUO Jiang
2016-05-27
郭 江(1984—),男,2011年毕业于西南交通大学大地测量学与测量工程专业,工程师。
1672-7479(2016)05-0038-04
P228.4
A