新型Delta机器人运动学建模及结构分析
2016-12-05刘飞飞高堂盼刘龙细古帅奇
刘飞飞 高堂盼 刘龙细 古帅奇
(1. 江西理工大学电气工程与自动化学院,江西 赣州 341000;2. 江西理工大学机电工程学院,江西 赣州 341000)
新型Delta机器人运动学建模及结构分析
刘飞飞1高堂盼2刘龙细2古帅奇2
(1. 江西理工大学电气工程与自动化学院,江西 赣州 341000;2. 江西理工大学机电工程学院,江西 赣州 341000)
通过对传统Delta机器人的分析,介绍了一种新型的Delta机器人结构,并运用ANSYS Workbench 14.0对传统Delta机器人结构以及新型Delta机器人结构进行静力学分析。通过对两种机器人结构模型的总变形量和应力分析结果进行比较分析,证明新型机器人结构的静力学性能得到了有效的提高,增强了Delta机器人的刚性和稳定性,并为新型Delta机器人后续的结构优化和控制系统的设计提供了参考依据。
Delta并联机器人;ANSYS Workbench 14.0;静力学分析;运动学建模
随着经济的快速发展,食品行业的生产线也变得越来越自动化、智能化。目前,食品行业的前期机械生产能力非常强,但后期的分拣、包装机械能力比较弱。有些企业还在采用传统的手工作业,显然这已经满足不了市场的需求了,特别是在一些需要高速完成运输、封箱、包装、分拣等操作的食品生产加工和包装行业中,手工作业生产效率低、劳动强度大、产品质量差,根本无法达到企业生产要求,直接影响到企业的经济效益,所以很多食品企业都开始用工业机器人进行自动化生产,例如Delta并联机器人。
Delta机器人是综合了机械工程技术、电子工程技术、计算机控制技术、信息传感技术等高新技术的新型技术,现在已经广泛地运用到各个行业中,提高了产品的生产质量、劳动生产率及工作效率[1-2]。目前,市面上运用比较广泛的是三自由度Delta机器人,这种机器人生产效率高、定位精度准,但是承载能力有限,高速运行时,其刚性也略显不足[3]。本研究在传统三自由度Delta机器人的基础上,利用SolidWorks三维建模软件对其结构进行改进,并对其运动学进行了建模分析,利用ANSYS Workbench 14.0对前后两种机构进行有限元分析,以验证改进后机器人结构的可行性。
1 基于SolidWorks新型Delta机器人模型的建立
传统的Delta机器人都是由静平台、动平台、3根驱动杆、3个平行四边形从动支链组成。静平台与动平台通过3条运动相同的运动链相连接,每条运动链都包含一个由4个球形铰链与杆件组成的平行四边形闭环,此闭环再与一个带转动关节的驱动杆相串联,驱动杆的一端与电动机相连固定在静平台上,在电动机的驱动下作一定角度的往复摆动,其三维模型简图见图1。这类并联机器人的承载能力和刚度比串联机器人要好,但是如果负载比较大时,该并联机器人在快速运作时动平台便会出现颤抖,刚性相对来说比较低,为此,本文利用精密的滚珠丝杠机构对此并联机器人进行了一定的改进,以提高并联机器人的负载能力和刚性,改进后的Delta机器人的模型简图见图2。
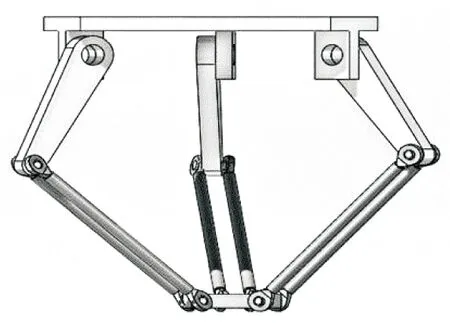
图1 传统Delta机器人的三维模型
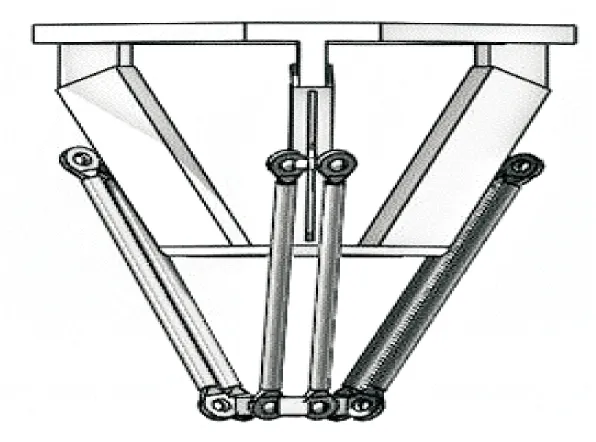
图2 新型Delta机器人三维模型
为了便于分析,图1、2中的模型都是经过简化的。滚珠丝杠是一个以滚珠作为滚动媒介的滚动螺旋传动的机构,该机构能够将回转运动转化为直线运动。滚珠丝杠为点接触滚动运动,摩擦阻力小、灵敏度高、精度高,运动非常平稳,而且滚珠丝杠的传动效率非常高,能够到达90%~98%,要比传统的滑动丝杠系统的传动效率高1~3倍,能以较小的扭矩得到较大的推力,所以本研究采用滚珠丝杠机构对Delta机器人机构进行改进。如图2所示,用3个相同的滚珠丝杠机构和一个平台在静平台下方沿圆周连接组成一个固定的机构并与静平台相连成为一个整体结构,然后在滚珠丝杠机构上加一个滑块,滑块连接着由4个球形铰链与杆件组成的支链,支链的另一端与动平台相连。由电动机驱动滚珠丝杠,带动丝杠上的滑块沿着滚珠丝杠的滑轨运动,从而带动平行四边形闭环,使动平台产生运动。
2 新型Delta机器人的运动学建模仿真
2.1 Delta机器人运动学模型的建立
运动学建模分析是机器人设计的主要环节,是为后续结构优化和控制系统的设计提供依据的。为了便于研究新型Delta机器人的运动规律,可以将图2中的新型Delta并联机器人模型简化成图3所示的结构简图。
如图3所示,在静平台上建立静坐标系,静坐标系O—xyz,原点O位于静平台的几何中心。同理,在动平台上建立动坐标系O′—x′y′z′,原点O′为动平台的几何中心,其中Z轴和Z′轴分别垂直于静平台和动平台,Oy轴和O′y′=180 mm轴分别垂直于A1A2和P1P2。3根滚珠丝杠为图中的BAi,长度均为L1,从动杆为图中EiPi,长度均为L2,θ1,θ2,θ3分别为从动杆与滚珠丝杠的夹角,βi为滚珠丝杠与静平台的夹角。
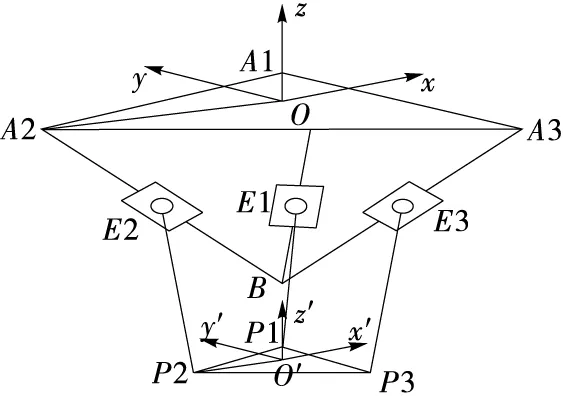
图3 改进后Delta机器人的机构简图
如图4所示,已知静平台|OAi|=R,动平台|O′Pi|=r,则点Ai在静坐标系O—xyz中的位置矢量为:
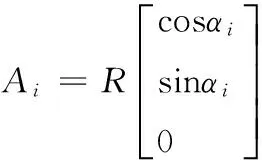
(1)

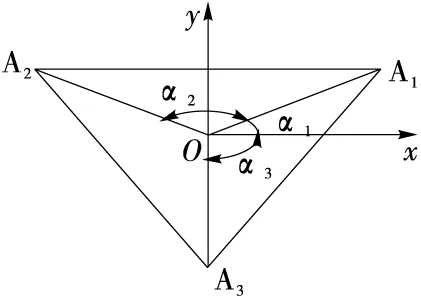
图4 静平台的结构参数
同理可得出P在O′—x′y′z′坐标系中的位置矢量:

(2)
利用几何向量的相关知识,可以得出Ei在O—x′y′z′坐标系中的位置矢量:
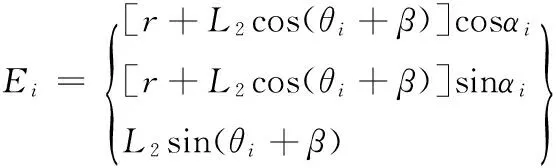
(3)

设O′在O—xyz坐标系中的位置矢量为OO′=(xyz),O′Ei又已知,所以OEi:

(4)
由ΔAiOB的几何关系可得:

(5)
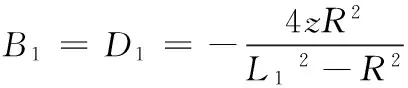
整理并化简式(5),可以得到一个关于θ的一元四次方程:

(6)

(7)
(8)

(9)

(10)

(11)
(12)

(13)

(14)

(15)
(16)

(17)

(18)
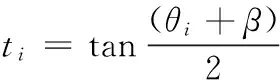
其中,Ai,Bi,Ci,Di,Ei均为已知量,所以式(6)是关于t的一元四次方程,求出t,然后就能得到θi的值:
θi=2arctan(ti)-β。
(19)
所以当给定机器人动平台的运动轨迹时,根据式(19),可得出杆EiPi与AiB夹角的运动情况[4]。
2.2 Delta机器人运动学模型的仿真分析
对新型Delta机器人的运动学进行了建模后,可以利用Matlab对其进行仿真分析。本研究拟给出的机器人机构尺寸参数分别是R=180 mm,r=60 mm,L1=300 mm,L2=800 mm,动平台的运动轨迹方程为:
(20)
根据此轨迹曲线方程在Matlab中进行仿真,可以获得当动平台沿预定轨迹运动时相应支链的转角、角速度的变化情况,见图5。
通过以上运动学建模仿真分析可以看出新型Delta机器人的运动是平稳有序的,说明对传统Delta机器人结构的改进是符合实际要求的,对其运动学的建模是正确,为其后期的结构分析、结构优化以及控制系统的设计提供了较为可靠的理论依据。
3 基于ANSYS Workbench 14.0的结构分析
3.1 ANSYS Workbench 14.0简介
ANSYS Workbench 14.0是由ANSYS公司开发的仿真应用平台,其中涵盖了一系列先进的工程仿真应用,并且拥有CAD的双向接口、强大的参数管理功能以及集成的优化工具[5]。ANSYS Workbench学习简单、运用方便,适用于很多工程领域的设计分析。ANSYS Workbench的工作环境是AWE(ANSYS Workbench Environment)多物理场协同仿真环境,具有装配体自动化分析功能、自动化网格划分功能、多物理场分析环境的快捷优化工具[6]。
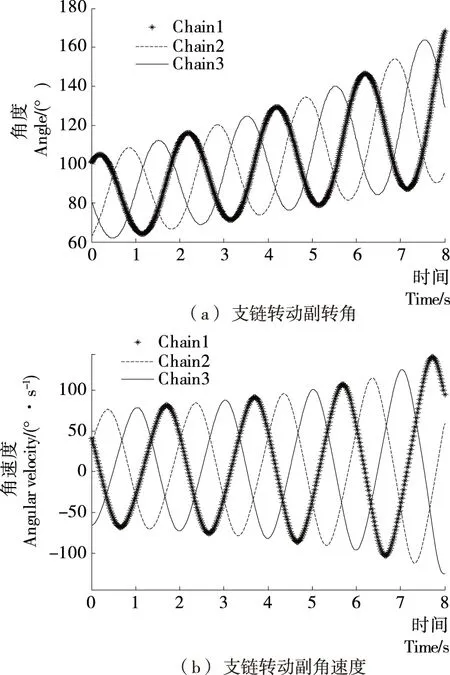
图5 支链转动副角度及角速度变化情况
3.2 Delta机器人结构分析
由经典力学理论可知,物体的动力学通用方程为:
[M]{x″}+[C]{x′}+[K]{x}={F(t)},
(21)
式中:
[M]——质量矩阵;
[C]——阻尼矩阵;
[K]——刚度矩阵;
{x}——位移矢量;
{F(t)}——力矢量;
{x′}——速度矢量;
{x″}——加速度矢量。
而现行结构分析中,与时间t相关的量都将被忽略,于是式(21)可以简化为:
[K]{x}={F}。
(22)
Workbench就是基于这些理论对机构进行分析的,下面将利用ANSYS Workbench 14.0对两种机器人结构的典型姿态位置进行分析比较[7]。
(1) 通过Solidworks与ANSYS workbench接口将两个不同机构的Delta机器人三维模型导入到AWE环境中,在“Engineering Data”设置好相关的材料属性。机器人材质密度为7 890 kg/m3,弹性模量为209 GPa,泊松比为0.269。
(2) 利用“mesh”功能对机器人进行网格划分。选择自由网格划分法,网格的疏密会直接影响计算结果精度,网格太疏会影响计算精度,网格太密又会使得计算时间过长,降低了效率。经过适当调整网格划分参数,确定了机器人有限元网格划分模型,分别对两种机构的机器人进行了网格划分,传统Delta机器人划分了28 936个单元,66 717个节点,新型Delta机器人划分了32 037个单元,70 617个节点,其有限元模型分别见图6、7[8]。
(3) 在“Static Structural”模块中对两种机构机器人的定平台表面设置固定约束“Fixed Support”,并对动平台施加一个负载力F=100 N。最后,在树形目录的“Solution”中,通过“Insert”选项依次添加“Total Deformation”和“Equivalent Stress”,点击“solve”进行分析[9]。
经过有限元分析得到传统Delta机器人和新型Delta机器人的变形云图和等效应变云图见图8、9。
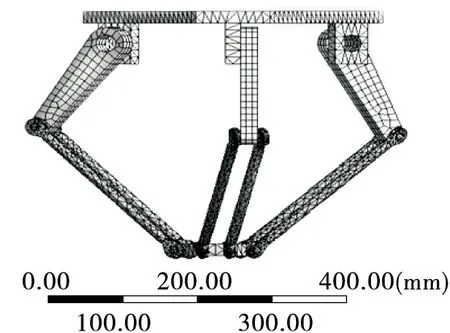
图6 传统机器人有限元模型
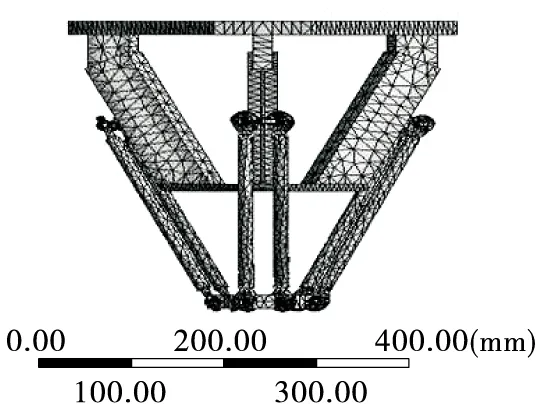
图7 新型机器人有限元模型
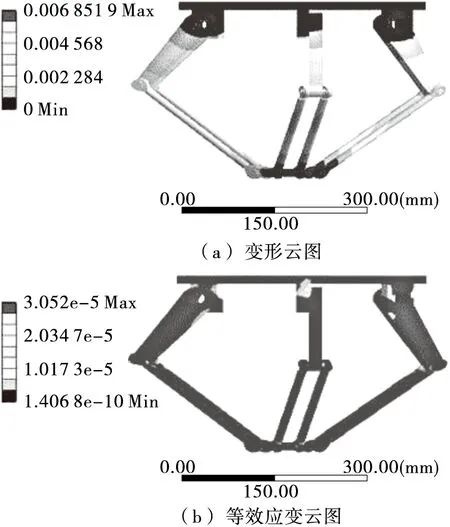
图8 传统Delta机器人变形云图及等效应变云图
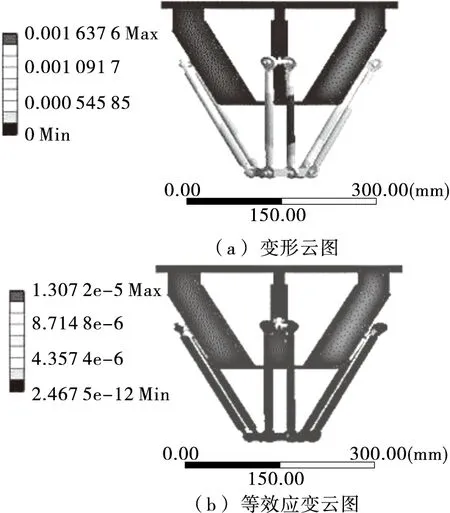
图9 新型Delta机器人变形云图及等效应变云图
由图8、9可知,传统机构的Delta机器人的最大变形量为6.852×10-3mm,最大等效应变为3.052×10-3mm/mm,而新型Delta机器人的最大变形量为1.637×10-3mm,最大等效应变为1.307 2×10-3mm/mm。两相比较,改进过的新型Delta机器人的最大变形量明显降低了。为了更好地对两类机器人的变形量和刚性进行分析,分别对两类机器人的从动杆的变形进行分析,并绘出相应的曲线图,见图10、11。由变形曲线图和等效应变曲线图可以明显看出,改进后的新型Delta机器人的静力学性能得到了有效的提高,刚性和稳定性也得到了改善。

图10 同一根从动杆变形曲线图
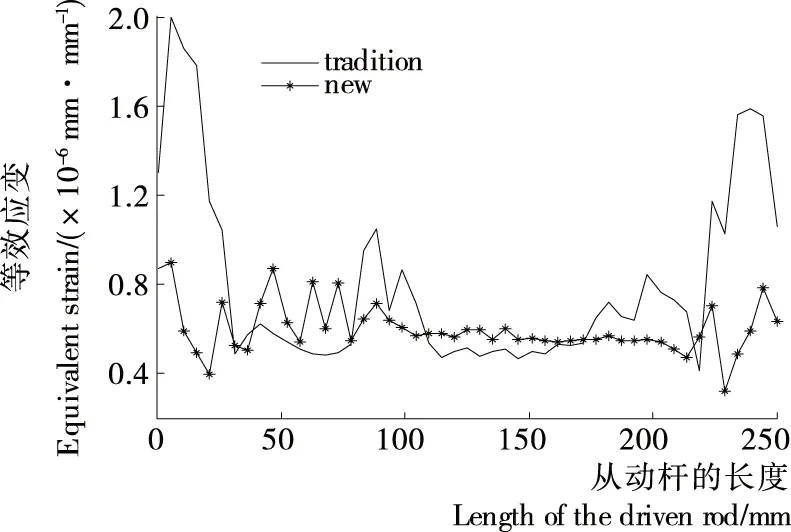
图11 同一根从动杆等效应变曲线图
4 结论
利用Solidworks设计了一种新型的Delta机器人结构,并对其进行了运动学建模分析,为食品行业的高速度、高效率、高质量生产提供了技术支持,具有较大的实际意义。
ANSYS Workbench易学易用,无需费时费力地编写程序对机构进行有限元分析,非常方便。本文基于AWE环境对改进前后两类机器人进行了结构分析,通过分析结果,有力地证明了改进后的新型Delta机器人的静力学性能和刚性优于传统的Delta机器人,其分析结果也为新型Delta机器人结构的优化和控制提供了重要依据。
[1] 冯李航, 张为公, 龚宗洋, 等. Delta系列并联机器人研究进展与现状[J]. 机器人, 2014, 36(3): 375-384.
[2] 康晓娟. Delta并联机器人的发展及其在食品工业上的应用[J]. 食品与机械, 2014, 30(5): 167-172.
[3] 蒋毅,李正阳, 应在恩, 等. 食品分拣机器人动力学仿真[J]. 食品与机械, 2015, 31(5): 93-96.
[4] 梁香宁. Delta机器人运动学建模及仿真[D]. 太原: 太原理工大学, 2008: 7-25.
[5] 张建中, 王庆, 于洪绪, 等. 基于ANSYS Workbench的薄壁筒形件有限元分析[J]. 包装与食品机械, 2014, 32(3): 39-41.
[6] 董旭, 李志杰, 徐晶明. 基于ANSYS Workbench六自由度工业机器人动态特征分析[J]. 精密制造与制动化, 2014(3): 10-14.
[7] 黄志新, 刘成柱. ANSYS Workbench 14.0超级学习手册[M]. 北京: 人民邮电出版社, 2013: 165-167.
[8] 张国锋, 王卫荣. 基于ANSYS Workbench的吊座尺寸多目标优化设计[J]. 机械工程与自动化, 2014(1): 69-71.
[9] 李兵, 何正嘉, 陈雪峰. ANSYS Workbench设计、仿真与优化[M]. 北京: 清华大学出版社, 2011: 32-38.
Kinematic modeling and structural analysis of a new kind of delta robot
LIUFei-fei1GAOTang-pan2LIULong-xi2GUShuai-qi2
(1.SchoolofElectricalEngineeringandAutomation,JiangxiUniversityofScienceandTechnology,Ganzhou,Jiangxi341000,China2.SchoolofMechanicalandElectricalEngineering,JiangxiUniversityofScienceandTechnology,Ganzhou,Jiangxi341000,China)
A new type of Delta Robot was introduced through the analysis of the traditional 3-DOF Delta Robot. And static analysis was performed on the structure of both traditional and new type of Delta Robot by using ANSYS Workbench 14.0. It was proved that statics performance of the new Delta Robot structure has been effectively improved and its rigidity and stability was enhanced through comparison and analysis of total deformation and stress of the two types of Delta Robot models. It also provides a reference to the design of structural optimization and control systems of the new Delta Robot.
delta parallel robot; ANSYS Workbench; static analysis; kinematic modeling
刘飞飞(1962-),男,江西理工大学教授,博士。
E-mail:gzlff@126.com
2016—01—21
10.13652/j.issn.1003-5788.2016.10.018
